

Summary
Locomozione è spesso esaminato come un risultato di comportamento in vari modelli di malattie in campi quali le neuroscienze e ortopedia. In questo documento il video propone di descrivere un metodo per raccogliere le forze di reazione del terreno e la cinematica di ratti durante la locomozione sfrenato.
Abstract
Comportamento, nella sua accezione più ampia, può essere definita come la manifestazione motore di processi fisiologici. Come tale, tutti i comportamenti si manifestano attraverso il sistema motorio. Nel campo delle neuroscienze e ortopedia, locomozione è un comportamento comunemente valutata per una varietà di modelli di malattia. Per esempio, il recupero motorio dopo lesioni traumatiche del sistema nervoso è uno dei comportamenti più comunemente valutata 1-3. Anche se locomozione può essere valutato utilizzando una varietà di misure dell'endpoint (per esempio il tempo impiegato per completare un compito motorio, ecc), le misure semiquantitative cinematica (ad esempio scale di valutazione ordinale (ad es Basso Beattie e locomotore Bresnahan (BBB) scala di valutazione, ecc)) e surrogato misure di comportamento (per esempio la forza muscolare, velocità di conduzione nervosa, ecc), solo cinetica (misure di forza) e cinematica (misure di segmenti del corpo nello spazio) fornire una descrizione dettagliata della strategia con cui un animale è in grado di locomote 1. Anche se non nuove misure, cinematica e dinamica dei roditori locomoting è ora più facilmente accessibili grazie alla disponibilità di attrezzature disponibili in commercio progettato per questo scopo. Importante, però, gli sperimentatori devono essere molto familiare con la teoria di analisi biomeccaniche e comprendere i vantaggi ei limiti di queste forme di analisi prima di intraprendere quello che diventerà uno studio relativamente alta intensità di lavoro. Il presente lavoro si propone di descrivere un metodo per la raccolta di dati cinematici e di terra della forza di reazione utilizzando apparecchiature disponibili in commercio. Dettagli di attrezzature e apparecchi di set-up, pre-addestramento di animali, criteri di inclusione ed esclusione di piste accettabile, e metodi per la raccolta dei dati sono descritti. Illustriamo l'utilità di questa tecnica di analisi comportamentale descrivendo la cinematica e la cinetica di tensione-matched giovane adulto, mezza età, e di ratti anziani.
Protocol
1. Pre-requisiti per l'analisi biomeccanica della locomozione
Prima di intraprendere l'acquisto di costose apparecchiature di analisi locomotore, e di pianificazione di esperimenti in cui cinematica e / o valutazione locomotore cinetica verrà eseguita, è imperativo che lo sperimentatore avere familiarità con gli aspetti tecnici e pratici di analisi biomeccanica, il comportamento sensomotorio, condizionamento operante di animali , e la gestione / archiviazione / gestione di grandi quantità di dati digitalizzati. Sebbene questi pre-requisiti sembrare ovvio a molti, è solo dopo intraprendere questo tipo di esperimenti in cui i tirocinanti realizzare la complessità tecnica e pratica di effettuare analisi dettagliate relativamente locomotore. Gli autori raccomandano che gli sperimentatori iscriversi ad un corso introduttivo si occupano di biomeccanica, avere familiarità con o assumere qualcuno conosce un linguaggio di programmazione necessarie per la gestione dei dati, e di pari importanza, trascorrono interagendo notevole tempo, la manipolazione, e lavorare con gli animali da laboratorio. Per comprendere l'analisi della locomozione e di analisi del comportamento sensomotorio nelle neuroscienze, gli sperimentatori sono indicati alcuni riferimenti importanti (vedi 1, 4-7).
2. Apparecchi di prova cinematiche e cinetiche
Un apparato di test cinematica e dinamica, utile per la raccolta dei dati bilaterale, è composto dai seguenti componenti (vedi "Tabella di reagenti e attrezzature specifiche" per maggiori dettagli):
- Stanza tranquilla e sufficientemente imprese (non necessariamente insonorizzate, anche se situato in zona a basso traffico)
- Radio per la fornitura di sottofondo "rumore" per limitare i rumori distraggono dall'esterno della sala per gli animali
- Plexiglass trasparente, chiuso, piatto superficie della pista (180 cm X 20 cm di larghezza x 60 cm di altezza) con un foro quadrato (11 cm X 11 cm) situato all'interno del centro della pista equidistante da entrambe le estremità
- Pezzo di plexi-glass (10,5 cm X 10,5 cm)
- Nastro biadesivo scotch adesivo
- Riflettente 3M nastro adesivo per i marcatori della pelle
- Foratura per la creazione di marcatori della pelle
- Macchina per anestesia Isofluorane necessari per anestetizzare gli animali per la rasatura prima del posizionamento dei marcatori della pelle
- Cheerios per incoraggiare il movimento dell'animale per tutta la lunghezza della pista
- AMTI HE6X6 forceplate
- Vicon Motus sistema personalizzato (software, computer, ecc)
- 4 telecamere (almeno 60 Hz di campionamento) e treppiedi con cavi connettore appropriato
- 4 telecamere montate lampade alogene fornisce un'illuminazione ottimale per l'illuminazione del soggetto animali e la pelle marcatori riflettenti
- Appropriata cornice di taratura standard o volume necessario per il sistema Vicon Motus per calibrare x, y, z in posizioni significative misure di distanza
3. Formazione degli animali
Prima della raccolta dei dati, ogni animale deve essere addestrato per attraversare una superficie piatta, pista chiusa. Dopo aver ricevuto i ratti da un fornitore animale appropriato, gli animali dovrebbero essere acclimatati alla loro nuova casa per 1 settimana. Durante questo periodo di acclimatazione, Cheerios diversi vengono inseriti ogni giorno nella gabbia del ratto. Gli animali sono cibo limitato a interventi di manutenzione la loro energia per prevenire l'obesità e assicurare la motivazione per svolgere questo compito. Successivamente, ogni animale viene gestita dallo sperimentatore per 10-15 minuti al giorno per 1 settimana. Durante questo stesso periodo di tempo, ogni animale viene messo in pista con Cheerios situati alle due estremità. Una volta che l'animale diventa familiarità con l'ambiente, inizieranno a mangiare i Cheerios. Una volta che l'animale sta bene e Cheerios mangiare all'interno della pista, lo sperimentatore deve poi operantly condizione l'animale a correre la lunghezza della pista per una ricompensa in cibo. Ciò si ottiene lanciando ciao ¼ al lato opposto della pista dove è posizionato il topo. Una volta che il topo mangia questo ciao, ciao un altro ¼ è posta all'altra estremità della pista. Questo viene fatto per 15-20 minuti al giorno fino a quando il ratto consistente (> 90% di lanci) si muove lungo la pista ad una velocità costante (cioè senza avviamento, arresto, esplorare, o senza cambiare andatura) a mangiare i ciao senza galoppo / delimitazione . Il ratto dovrebbe essere solo impiegando una andatura al trotto. Over-condizionamento degli animali a questo compito può portare agli animali al galoppo e delimitazione queste andature sono indicativi di animali viaggiare> 90 cm / s. Delimitazione e galoppo andature, biomeccanico, sono più difficili da interpretare per vari motivi (ad esempio gamba criteri di inclusione di piombo, ecc.) Nella nostra esperienza, una volta che i ratti costantemente impiegare al galoppo o di delimitazione andature, è difficile, se non impossibile averli utilizzare un andatura al trotto, mentre locomoting in pista. Velocità> 90 cm / s sono raramente osservati dopo un animale ha sofferto periferico o centrale lesioni del sistema nervoso. Tempo per raggiungere la formazione di successo è VariaBLE tra i sessi e ceppi di ratti. Wistar, Lewis, Long-Evans, e Sprague-Dawley ceppi sono in grado di attraversare sempre la pista entro 2 settimane dall'inizio della formazione 8. Nella nostra esperienza, Fischer (F-344) ratti tendono ad assumere verso l'alto di 4-6 settimane per imparare questo compito 8.
4. Posizione comune Marcatura
Analisi cinematica degli arti anteriori è inaffidabile a causa di artefatti pelle movimento imposte mettendo marcatori pelle degli arti anteriori, che è aggravata in specie, come i topi, che hanno una postura accovacciata 9. Invece, la cinematica degli arti anteriori deve essere realizzato utilizzando raggi X cinematografia o la fluoroscopia 10-13. Come tale, degli arti posteriori congiunta posizionamento indicatore di posizione è solo qui descritti.
Prima della raccolta dei dati, ogni topo deve essere anestetizzato almeno 24 ore prima della raccolta dei dati utilizzando un apposito anestetico inalatorio (ad es isofluorane, 1,5-2% composti su un vaporizor precisione) e amministrato in ossigeno tramite maschera facciale, e la chiave anatomica topografica punti di riferimento devono essere contrassegnati. Data la brevità della procedura, sia perché lunga durata d'azione anestetici non vengono utilizzati, l'uso di un dispositivo di riscaldamento animali non devono essere utilizzati per mantenere la temperatura corporea dell'animale. Una volta che l'animale è anestetizzato, gli arti posteriori e sul dorso, al livello delle creste iliache sono rasata. L'animale viene quindi posto in decubito sternale e le sue zampe posteriori sono posti in una posizione eretta approssimativa utilizzando schiuma ditta di imballaggio per sostenerlo. La cute sovrastante il cranio-più porzioni delle creste iliache, il grande trocantere del femore, della tuberosità tibiale laterale, l'articolazione del tarso, e la porzione distale e laterale del 5 ° metatarso è contrassegnato da un non-tossico pennarello indelebile. L'animale è ripreso dall'anestesia. Per gli studi temporale, anestesia periodica può essere richiesto di radere la zampe posteriori permettendo successivo collocamento marker riflettenti (vedi sotto). Inoltre, ogni giorno mettendo in evidenza dei punti di riferimento precedentemente segnato anatomici (utilizzando lo stesso marker non tossico) verrà richiesto come i ratti rimuovere lentamente il marker naturale, attraverso un comportamento governare.
5. Registrazione dei dati
Tutte le viste fotocamera vengono esaminati per assicurare che la loro posizione è appropriato e catturare lo stesso campo di vista. Ogni telecamera deve essere posizionato a circa 60-80 gradi l'uno all'altro. Il campo visivo deve includere il forceplate al centro e una lunghezza di pista sufficiente a catturare due passi.
Il volume di calibrazione si colloca all'interno del pre-determinata zona della pista. Un singolo fotogramma del volume di calibrazione all'interno della pista, da ciascuna delle telecamere, viene catturato. Tutti i marchi calibrato per tutta la lunghezza di ciascuno dei poli sono digitalizzati. Solo una volta un errore soddisfacente nella digitalizzazione è compiuto, lo sperimentatore può procedere alla raccolta di dati locomotore. Questa fase di calibrazione è fondamentale prima di raccolta dati. Se la calibrazione non viene eseguita correttamente, o se la calibrazione non si verifica immediatamente prima di una sessione di registrazione, tutti i dati risultanti saranno imprecisi e inutilizzabile. Importante, se una qualsiasi delle telecamere vengono toccati o spostati, è più sicuro supporre che la taratura del sistema deve essere ripetuto.
Immediatamente prima di mettere l'animale in pista, il suo peso viene registrato e pre-made conica marcatori riflettenti della pelle (con nastro riflettente 3M, vedi tabella) sono rispettati i segni sentito predeterminato effettuata sulla arto posteriore punti di riferimento topografico. Registrazione del peso dell'animale permetterà normalizzazione retrospettiva di forze di reazione terra per il peso corporeo - un aspetto importante se si vuole fare confronti tra i gruppi. Inoltre, la misurazione del peso corporeo facilita il controllo della salute generale dell'animale per tutta la durata dell'esperimento. Posizionamento Marker richiede solo la gestione appropriata degli animali e non richiede l'anestesia dell'animale. Se l'adesivo sul nastro riflettente non è sufficiente per aderire alla pelle dell'animale, una piccola quantità di colla non tossica (es. tessuto adesivo 3M VetBond) può essere utilizzato per facilitare l'aderenza del marcatore sul corpo dell'animale. Una volta che i marcatori sono immessi sul arti posteriori, lo sperimentatore deve essere posizionato comodamente vicino alla tastiera del computer e hanno in mano il marcatore evento collegato attraverso il sistema Vicon Motus. Utilizzando il file calibrato come modello, diversi file sono in anticipo di registrazione. Tipicamente, 25 a 30 file devono essere salvati. Ogni file dovrebbe avere un nome univoco. Ogni file rappresenta uno registrato corsa dell'animale in fase di registrazione. Venticinque a 30 file sono tenuti a garantire che un numero sufficiente di corse incontro la velocità criterio di inclusione (cioè 60-90 cm / s) sono raccolti. Dopo un numero sufficiente di file vengono creati lo sperimentatore può iniziare la raccolta dei dati. L'indirizzo experimenter deve indurre il ratto di navetta all'interno della pista gettando pezzi ¼ di Cheerios alle due estremità della pista. Con un attento coordinamento e la tempistica, il marcatore evento viene attivato al momento di cominciare e solo prima del completamento del ratto aver completato con successo un passaggio lungo la pista. Dopo aver esaminato il greggio forza di reazione terra da lucidi, e dopo la registrazione se la sinistra o le arti di destra ha colpito la piattaforma di forza, il file viene salvato e chiuso. Ugual numero di visite arto destro e sinistro forceplate dovrebbero essere registrati. Il processo di registrazione dei dati da una data stima viene ripetuta fino a quando un numero sufficiente di corse sono stati registrati.
6. Analisi dei dati
Dopo aver completato la raccolta dei dati per la cinematica e le forze di reazione di terra, ogni esecuzione di ogni animale ha bisogno di essere valutato per la velocità. Utilizzando due marcatori relativamente fissi (ad esempio ali di iliums) si può valutare un punto virtuale tra i marcatori (fatto prima quando si crea un file di Vicon Motus modello). Prima di calcolare la velocità di questo punto "virtuale", gli indicatori per i marcatori iliache devono essere digitalizzati. Utilizzando Vicon motu software, la velocità di questo punto virtuale in direzione X (direzione orizzontale del movimento) viene calcolato. In tal modo, funziona solo all'interno di una gamma di velocità di dato (determinato a priori) sono utilizzati nelle analisi finale. Troviamo che gli animali in movimento tra 60-90 cm / s sono coerenti con andature al trotto. Un minimo di 10 prove (5 corre in cui l'arto sinistro entra in contatto con la piattaforma di forza e 5 piste dove l'arto destro entra in contatto con la piattaforma di forza) sono obbligatori. Una volta che le piste accettabili sono individuati per ogni animale, la digitalizzazione dei marcatori pelle rimanenti devono essere completati.
Per compensare il movimento artefatto pelle sopra il ginocchio, la stima della posizione del ginocchio è calcolata usando triangolazione (intersezione tra due cerchi cinematica 2D; o incrocio tra 2 sfere 3D cinematica), come è stato descritto in precedenza. Angoli articolari dell'anca, del ginocchio e garretto, velocità, accelerazioni e ora può essere determinato. Statica e dinamica volte può anche essere valutata, anche se la loro precisione è limitata in base alla velocità di campionamento delle telecamere essere impiegato. Questi e altri calcoli possono essere eseguiti direttamente (cioè senza export) con Vicon Motus software KineCalc, o dati possono essere esportati come dati ASCII e analizzati utilizzando le routine personalizzabile in software come MatLab.
Dati a terra forza di reazione viene misurata e amplificata dalla piattaforma di forza AMTI e raccolti a 1200 Hz da Vicon Motus. Come tale, una volta che i dati reazione forza di terra vengono raccolti, un appropriato filtro digitale viene applicato ai dati utilizzando Motus Vicon. Dato che lo sperimentatore ha già stabilito la velocità del viaggio e identificato corre accettabile marcatori dopo la digitalizzazione della pelle del caso, i dati a terra forza di reazione che è stato raccolto contemporaneamente come i dati cinematici, possono essere analizzati utilizzando Vicon Motus KineCalc direttamente, o indirettamente tramite qualche altro software personalizzabile di routine. Una serie di variabili per le forze, in ciascuna delle tre direzioni ortogonali, può essere calcolato. Tali variabili includono forza massima, und zona della curva (cioè impulso), ecc importante, però, lo sperimentatore devono conservare i dati arto destro e sinistro per ogni esecuzione di ogni animale separati. Dati estratti da arti di destra o sinistra è la media per ogni animale e utilizzato come dati rappresentativi per quella animale. I dati vengono poi analizzati utilizzando procedure statistiche appropriate.
7. Rappresentante Risultati
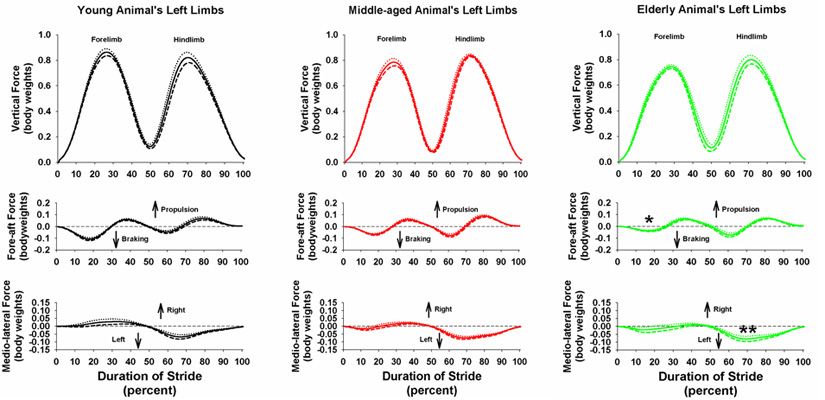
Per rappresentare l'utilità di questa forma di analisi locomotore, cinematica e le forze di reazione di terra sono stati determinati per i ratti femmine giovani, di mezza età, e geriatrica Wistar. Da questa analisi, età-correlate sono state rilevate differenze per le femmine di ratti Wistar. In particolare, la reazione analisi terreno forza dimostra che i topi anziani hanno ridotto la capacità di frenata e arti anteriori tendono ad usare le loro zampe posteriori più per la stabilizzazione laterale rispetto agli altri gruppi di animali (Figura 1). Analisi cinematica non hanno evidenziato differenze statistiche tra ciascun gruppo, dimostra però che cinematica può essere facilmente registrare da qualsiasi età di ratto (Figura 2).

Figura 1 forza di reazione terra tracciamento presi dalle membra sinistra di giovani. (4 mesi, n = 7), di mezza età (13-14 mesi di età, n = 7) e geriatrico (24 mesi di età, n = 5) ratti femmine Wistar. Arti di destra erano simili. E 'evidente che i ratti geriatrica usare i loro arti anteriori meno per la frenata (* = p <0,05) rispetto ai ratti giovani e di mezza età, e ratti anziani tendono ad usare le loro zampe posteriori più per la stabilizzazione laterale rispetto ai ratti giovani (**). Linee continue rappresentano dire, le linee tratteggiate rappresentano media + SE; tratteggiatalinee rappresentano dire SE. Clicca qui per vedere una figura più grande.

Figura 2. Figurine stilizzate cinematica per l'arto sinistro di ratti giovani, di mezza età, e geriatrica. Stick figure rappresentano il movimento medio del arto sinistro per ciascuno dei gruppi. Non ci sono state differenze significative tra i gruppi di animali per l'angolo comune durante il ciclo di passo. Clicca qui per vedere una figura più grande.
Discussion
Il presente documento fornisce la metodologia per la valutazione locomozione utilizzo continuo cinematica quantitativa e la reazione determinazione a terra la forza. Importante per chiunque sia interessato a intraprendere questa metodologia è un forte background nella biomeccanica della locomozione, animale comportamento sensomotorio e gestione dei dati e la manipolazione. Anche se cinematica e la terra determinazione forza di reazione richiede ulteriore tempo e competenze, rispetto ad altre forme di analisi locomotore (misure endpoint ad esempio, scale di valutazione ordinale), i dati ottenuti è sensibile, oggettiva e quantitativa per una varietà di 14-22 ortopedica e neurologica 1-3, 23-32 i modelli di malattia, in una varietà di specie.
Abbiamo fornito i dati che descrivono le differenze di locomozione tra varie epoche di tensione-abbinato informazioni ratti che non potevano essere raccolte con misure semplici e meno sensibili. Inoltre, l'analisi cinematica e cinetica di locomozione è stato usato per descrivere le alterazioni dell'apparato locomotore in una varietà di condizioni del sistema nervoso in cui altre forme di valutazione sarebbe successo. 8, 23-25, 27 L'uso di misure sensibili diventa particolarmente importante quando si valutano therapeutants potenziale per vari modelli di malattia. Se un test non è abbastanza sensibile per distinguere un effetto di una potenziale therapeutant lo sperimentatore corre il rischio di commettere un errore di tipo II statistica (cioè concludere vi è alcun effetto di un trattamento quando in realtà c'è stato un effetto). Inoltre, perché le misure di endpoint e le prove più soggettiva che valutano locomozione, esiste un potenziale di bias. Valutazione cinematica e cinetica è puramente oggettivo, in quanto, purché esistano appropriati di inclusione / esclusione criterio sono fatte a priori, semplicemente lo sperimentatore raccoglie, esamina e applica le statistiche relative ai dati (cioè non c'è componente soggettiva alla determinazione dei dati).
Analisi cinematica e cinetica offre anche la possibilità di essere utilizzato per una moltitudine di specie. Infatti, la cinematica, la reazione determinazione a terra la forza, o entrambi sono stati usati in una varietà di specie come elefanti 33-35, bestiame 36, 37-40 cavalli, cani 4, 41-45, i gatti 21, 46-49, vari roditori 3, 8, 50, 51, uccelli 4, 52-55, e di pesce 56, 57 (l'elenco non è esaustivo). Secondo l'esperienza degli autori ', tuttavia, l'uso dei topi è un problema dato che i topi non sono facili da operantly condizione di viaggiare lungo una pista. Detto questo, i topi non viaggeranno ad una velocità relativamente costante e invece accelerare e rallentare quando si attraversa la pista. Questo comportamento può probabilmente, in parte, essere superata eseguendo topi su un tapis roulant e video-registrando il locomoting animale sul tapis roulant. 58 Se l'apparato sperimentale per la determinazione della forza di reazione di terra è stato quello di essere modificati per l'utilizzo tapis roulant, la reazione di determinazione terreno forza avrebbe probabilmente solo essere facilmente ottenuto per la forza verticale di reazione del terreno come la cintura di tapis roulant potrebbe interferire con longitudinale e medio-laterale determinazione forza.
Complessivamente, l'analisi cinematica e cinetica di locomozione è un metodo affidabile, sensibile, e obiettivo che può essere impiegato per vari modelli di patologie di interesse ortopedico e neurologico. Inoltre, tutte le apparecchiature si sono rese disponibili per l'uso in roditori, così negando qualsiasi motivo non correlati per l'esecuzione di questa forma di analisi del comportamento sensomotorio.
Disclosures
Nessun conflitto di interessi dichiarati.
Acknowledgments
Questa ricerca è stata sostenuta da una sovvenzione Discovery per AAW dalle scienze naturali e ingegneria Research Council del Canada.
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J. Biomechanics of locomotion in Asian elephants. J. Exp. Biol. 213, 694-706 (2010).
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M. Trunk deformation in the trotting horse. Equine Vet. J. 41, 203-206 (2009).
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R. Penguin waddling is not wasteful. Nature. 408, 929-929 (2000).
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}