Summary
Vi beskriver en ny metode til at skabe naturalistiske 3-D objekter og objekt kategorier med præcist definerede funktion variationer. Vi bruger simuleringer af de biologiske processer i morfogenese og phylogenesen at skabe nye, naturalistiske virtuelle 3-D objekter og objekter kategorier, der derefter kan leveres som visuelle billeder eller haptiske objekter.
Abstract
For at kvantitativt studere objekt opfattelse, hvad enten det opfattelsen af biologiske systemer eller af maskiner, er man nødt til at oprette objekter og objekt kategorier med netop definerbar, fortrinsvis naturalistiske, ejendomme 1. Desuden er der for undersøgelser af perceptuel læring, er det nyttigt at skabe nye objekter og objekt kategorier (eller objekt klasser) med sådanne egenskaber 2.
Mange innovative og nyttige metoder i øjeblikket eksisterer for at skabe nye objekter og objekt kategorier 3-6 (se også ref. 7,8). Men generelt de nuværende metoder er tre typer mangler.
Først form variationer generelt pålagt af forsøgslederen 5,9,10, og kan derfor være forskellig fra variation i naturlige kategorier, og optimeret til en særlig anerkendelse algoritme. Det ville være ønskeligt at have variationer opstår uafhængigt af externally pålagt begrænsninger.
For det andet kan de eksisterende metoder har svært ved at fange formen kompleksiteten af naturlige objekter 11-13. Hvis målet er at studere naturlig objekt opfattelse, er det ønskeligt for objekter og objekter kategorier skal naturalistiske, for at undgå eventuelle forvirrer og særlige tilfælde.
For det tredje er det generelt vanskeligt at kvantitativt at måle den tilgængelige information i de stimuli skabt af konventionelle fremgangsmåder. Det ville være ønskeligt at oprette objekter og objekt kategorier, hvor de tilgængelige oplysninger kan måles nøjagtigt og, hvor det er nødvendigt, systematisk manipuleret (eller 'tunet'). Dette gør det muligt at formulere de underliggende objektdetektering opgaver i kvantitative termer.
Her beskriver vi et sæt algoritmer eller fremgangsmåder, der opfylder alle tre af de ovennævnte kriterier. Virtual morfogenese (VM) skaber nye, naturalistiske virtuelle 3-D genstande såkaldte »digitale embryoner« vedsimulerer den biologiske proces embryogenese 14. Virtual phylogenesen (VP) skaber nye, naturalistiske objekt kategorier ved at simulere den evolutionære proces med naturlig udvælgelse 9,12,13. Objekter og objekt kategorier skabt af disse simuleringer kan manipuleres yderligere ved forskellige morphing metoder til at generere systematiske variationer af form egenskaber 15,16. VP og morphing metoder kan også anvendes i princippet til nye virtuelle andre objekter end digitale embryoner, eller til virtuelle udgaver af virkelige objekter 9,13. Virtuelle objekter, der oprettes på denne måde kan gøres som visuelle billeder ved hjælp af en konventionel grafisk toolkit, med ønskede manipulationer af overfladestruktur, belysning, størrelse, synspunkter og baggrund. De virtuelle objekter kan også "printet" som haptiske objekter med en konventionel 3-D Prototyper.
Vi beskriver også nogle implementeringer af disse beregningsmæssige algoritmer til at illukoncentrere den potentielle anvendelighed af algoritmerne. Det er vigtigt at skelne de algoritmer fra deres implementeringer. De implementeringer er demonstrationer, der tilbydes udelukkende som en "proof of principle 'af de underliggende algoritmer. Det er vigtigt at bemærke, at der generelt er en implementering af et beregningsmæssige algoritme ofte har begrænsninger, at algoritmen ikke selv har.
Sammen disse metoder udgør et sæt af kraftfulde og fleksible værktøjer til at studere objekt genkendelse og perceptuelle læring ved hjælp af biologiske og beregningsmæssige systemer ens. Med passende udvidelser, kan disse fremgangsmåder også være nyttige i studiet af morfogenese og phylogenesen.
Protocol
1. Oprettelse Naturalistiske virtuelle 3-D objekter ved hjælp af VM
- Hvis du vil oprette digitale embryoner, skal du bruge Digital Embryo Workshop (DEW, se tabel 1). Hver kørsel genererer en enkelt embryo 14, hvis form er unik for et givet sæt indstillinger (eller "genotype") anvendes til given kørsel (figur 1). De »celler« i embryo er repræsenteret som trekanter 14.
- Kør programmet så mange gange for at frembringe det ønskede antal embryoner.
- Hvis mere komplekse former ønskes, øge antallet af vækstcyklus, dvs antallet af gange cellerne i fosteret vil deler. Bemærk, at dette også vil bremse programmet. Hvis det er nødvendigt at skabe virtuelle andre objekter end digitale embryoner Anvend kommercielt tilgængelige 3-D modelleringsværktøjer eller opnå virtuelle objekter fra kommercielle leverandører (tabel 1).
- Det er generelt tilrådeligt at gemme det virtuelle objekts i en almindeligt anvendt filformat, såsom OBJ, således at genstandene let kan indføres i en kommerciel 3-D modellering toolkit. Til dette formål, skriver DEW objekter i OBJ format som standard.
- Visuelle stimuli kan genereres ved hjælp af en eller flere digitale embryoner under anvendelse af en 3-D-modellering og rendering miljø (tabel 1). Brug standard grafiske operationer, såsom at variere retning, størrelse, belysning, overflade tekstur og baggrund til at skabe de ønskede stimuli (se figur 2).
2. Oprettelse Naturalistiske Object kategorier ved VP
- For at generere objekt kategorier, generere efterkommere (eller "børn") af den givne forfader (eller "moder") objekt med en ønsket kombination af processerne i trin 1,1 ovenfor (figur 3) 9,10,12,13.
- Nogle metoder er beskrevet nedenfor for at skabe glat form variationer, såsom morphing eller hovedkomponenter (se trin 3 og 4 nedenfor), arbejde Bettare hvis alle inputobjekter har samme antal celler, og hvis der er en-til-en korrespondance mellem de hjørner af objekterne. Til oprettelse af sådanne genstande, kun anvende de VM processer, der ikke vil ændre antallet af celler og vil bevare en-til-en korrespondance af knudepunkter blandt de objekter (se fx generationer G 2 til G 3 i figur 3). For eksempel ændrer celledeling og programmeret celledød antallet af celler, og gøre det meget sværere (men ikke umuligt 17,18) til at bestemme en-til-en overensstemmelse mellem de hjørner af et givet par af objekter.
Bemærk, at de processer, som ændrer antallet af celler i et givet objekt også ændre sin form kompleksitet. I almindelighed, jo større antallet af celler er, jo større formen kompleksiteten af objektet og glattere dens overflade. - Om nødvendigt virtuelle objekter end digitale embryoer kan anvendes som input til VP (figur 4).
- Nogle metoder er beskrevet nedenfor for at skabe glat form variationer, såsom morphing eller hovedkomponenter (se trin 3 og 4 nedenfor), arbejde Bettare hvis alle inputobjekter har samme antal celler, og hvis der er en-til-en korrespondance mellem de hjørner af objekterne. Til oprettelse af sådanne genstande, kun anvende de VM processer, der ikke vil ændre antallet af celler og vil bevare en-til-en korrespondance af knudepunkter blandt de objekter (se fx generationer G 2 til G 3 i figur 3). For eksempel ændrer celledeling og programmeret celledød antallet af celler, og gøre det meget sværere (men ikke umuligt 17,18) til at bestemme en-til-en overensstemmelse mellem de hjørner af et givet par af objekter.
- Objekterne i en bestemt kategori kan yderligere vælges for at opnå en bestemt fordeling af funktioner 19. For eksempel kan man selektivt fjerne mellemstore objekter fra en bestemt kategori for at generere en bimodal fordeling af objektets størrelse.
- Der findes ikke en enkelt metode, der er universelt optimal til måling af tilgængelig figur information for alle kategorier, der er heller ikke en enkelt metode, som er optimal til at kategorisere alle objekter 20-22. Således skal experimentor vælge disse metoder baseret på de kategorier og beregningsmæssige mål ved hånden 20-22. Trin 4 beskriver en almindeligt anvendt fremgangsmåde til manipulering af forskellige aspekter af tilgængelig figur information.
- Ligheden mellem en given par af kategorier kan måles objektivt ved hjælp af eksisterende fylogenetiske metoder 23,24. For eksempel som den vertikale (eller "evolutionære") afstand mellem et givet par af kategorier, målt ved hierarkisk clustering metoder i R statistiske toolkit, er et objektivt mål for kategori lighed 25,26.
3. Yderligere metoder til at skabe Shape Variation: Digital Morphing
- I betragtning som helst par af objekter, så at hvert hjørne af et objekt svarer til nøjagtigt en top af det andet objekt (. Dvs. objekter med en-til-en overensstemmelse mellem knudepunkter), morphing er ligetil 17,18,27-29: I denne tilfælde er glatte variationer (eller "morphs ') mellem de to genstande fremstillet af glat interpolation mellem de tilsvarende toppunkter og raske (figur 5). Afhængig af parret af udvalgte objekter, vil morphing resultere i nye kategorier eller flere børn inden for en kategori.
- Formålene vist i figur 5 blev skabt under anvendelse af lineær morphing 27-29. Objekterne kan morphed (eller skæv) ved en bred vifte af andre tilgængelige deformation teknikker 17,18.
- At skabe en ønsket fordeling af morphed figurer, vælge interpolationspunkter overensstemmelse hermed.
4. Yderligere metoder til at skabe Shape Variation: hovedkomponenter
- For at bruge hovedkomponenter at generere form variationer må man først bestemme hovedkomponenterne 15. Vigtigste komponenter er specifikke for det givne sæt af objekter, der bruges til at bestemme dem 26. For gode resultater ved at bruge mindst 30 genstande med en-til-en korrespondance mellem hjørnepunkter 26.
- Generer en gennemsnitlig objekt fra en ønsket mængde af n inputobjekter,. ved separat midling af koordinaterne og den normale i hvert hjørne på tværs af alle objekter Således er x-koordinat for et givet toppunkt k af bør være gennemsnittet af x-koordinater for vertex k for alle n objekter, og så videre.
- Brug Matlab-funktionen princompat bestemme vigtigste komponenter i n objekter. Dette genererer n-1 ikke-nul egenvektorer, sammen med den tilsvarende n-1 eigenvalues 26.
- For at generere et nyt objekt A j fra en given principal komponent P i, formere P Jeg ved den tilsvarende egenværdi λ i og en ønsket vægt w j og tilføje til den gennemsnitlige objekt:
A j = + w j λ in Pi - Hver unik w j vil generere et unikt objekt. Ved jævnt varierende w, kan man skabe glatte form variationer langs en given principal komponent.
- Hvis du vil oprette form variationer langs en uafhængig form dimension, skal du gentage trin 4,4 med en anden hovedbestanddel.
- At skabe en ønsket fordeling af figurer langs en given hovedbestanddel, bruge den ønskede fordeling af vægt. </ Li>
- Hvis du vil oprette en multi-dimensional gitter af figurer, skal du bruge et sæt af vægte for hver af flere hovedkomponenter:

5. Oprettelse af haptiske Versioner af 3-D objekter
- »Print-out" 3-D objekter ved hjælp af en 3-D Prototyper (eller 3-D 'printer'). Om nødvendigt justeres objektets størrelse og glat objektets overflade før udskrivning.
6. Et forbillede Anvendelse: Bayesiansk inferens af Image Kategori
- En vigtig opgave i visuel forarbejdning er at udlede, hvilken kategori en given observerede objektet tilhører. Selv om den nøjagtige mekanisme af denne slutning er ukendt, er der både beregningsmæssige og fysiologiske beviser 9,12,13,30-32 at det indebærer anvendelse af oplysninger om kendte træk ved objektet i givet billede at udlede kategorien af objektet. Her vil vi illute, hvordan denne empiriske proces kan arbejde i et Bayesian rammer, og hvordan digitale embryoner kan være nyttige til forskning på dette område.
- For nemheds skyld vil vi antage, at den kategorisering opgave er todelt og omfatter skelne kategori K fra kategori L (Figur 3). Lad C være den klasse variabel. Vi udlede, at C = K eller C = L alt efter om det observerede billede I i klasse K eller L. En typisk metode til kategorisering indebærer:
- Beregning af sandsynligheden for, at den kategori er K i betragtning af information i billedet, betegnet p (C = K | I);
- Beregning af sandsynligheden for, at den kategori er L betragtning af information i billedet, betegnet p (C = L | I), og
- Picking den kategori med det højere sandsynlighed.
- Dernæst vil vi antage for enkelhedat der er nøjagtigt en binær funktion F. Denne funktion kan enten være til stede i billedet (betegnet F = 1) eller fraværende fra billedet (betegnet F = 0). Dette eksempel vil bruge det informative fragment 'funktionen vist i figur 8. Informative fragmenter blev først beskrevet af Ullman og kolleger 33. I den foreliggende sag, vil vi bruge billedet skabelon vist i figur 8 som kendetegn, og en grænseværdi på 0,69. For at afgøre om denne funktion er til stede i en given billede (sige, længst til højre billede i rækken G3 i figur 3), vil vi bruge de følgende trin:
- Skub denne skabelon over alle mulige placeringer i billedet og beregne, på hvert sted, den absolutte værdi af normaliseret krydskorrelation mellem skabelonen og den underliggende sub-billede.
- Vælg billedet placering med den højeste værdi (0,60 i den foreliggende sag).
- Hvis denne værdi er over tærsklen, konkludereat funktionen er til stede, ellers konkludere, at det er fraværende. I vores tilfælde, idet den højeste korrelation 0,60 ligger under grænsen på 0,69 konkluderer vi, at funktionen er fraværende i billedet.
- Begrundelsen for at bruge sådanne funktioner, og mekanismerne i udvælgelsen funktioner og bestemme deres tærskler er uden for rammerne af denne rapport, men er beskrevet i detaljer i Refs. 33 af 30.
- Inden for rammerne af feature-baseret inferens, antager vi, at alle de oplysninger, som observatøren uddrag fra billedet er indeholdt i værdien af denne funktion, dvs. e, at p (C | I). = p (C | F).
Derfor er opgaven bliver at undersøge værdien af F i den givne billede (nuværende eller fraværende), computing p (C = K | F) og p (C = L | F) for den pågældende værdi F, og vælge den kategori med den højere probabiheden. - I Bayesiansk rammer,

Derfor,
og

Bemærk, at nævneren i de to ligninger er den samme. Derfor for at sammenligne p (C = K | F) og p (C = L | F), er det ikke nødvendigt at beregne nævneren, men derimod er det tilstrækkeligt at beregne de mængderp (C = K | F) α p (C = K) p (F | C = K)
og
p (C = L | F) α p (C = L) p (F | C = L)
These kaldes undertiden »unnormalized sandsynligheder«. Udtrykket p (C) kaldes »forudgående«, og udtrykket p (F | C) kaldes »risiko«.- For nemheds skyld vil vi antage en 'flad' tidligere: p (C = K) = p (C = L) = 0,5.
- Opgaven er nu at beregne p (F | C), sandsynligheden for en given funktion værdi i et billede af en given kategori C.
- Vi vil anvende de seks billeder i klasse L (fig. 3) som et eksempel til at beregne p (F = 1 | C = L), er sandsynligheden for, at funktionen er til stede i et billede af klasse L.
- For at beregne p (F = 1 | C = L), først tage alle de uddannelseskrav, billeder, der hører til L. Igen er disse vist i figur 3..
- For hvert billede, afgøre, om funktionen er 1 (stede) Eller 0 (fraværende), som beskrevet i (6.3.1) - (6.3.3). I vores tilfælde for de seks billeder i figur 3 er værdierne: [0, 0, 1, 0, 1, 0].
- Beregne den brøkdel af billeder, hvor funktionen er 1. I vores tilfælde er det 2/6 = 0,33.
- Derfor p (F = 1 | C = L) = 0,33. Bemærk, at for at opnå nøjagtige overslag, bør man bruge mindst 30 billeder pr klasse.
- På lignende måde kan vi beregne, at p (F = 0 | C = L) = 0,67, p (F = 1 | C = K) = 0,83, p (F = 0 | C = K) = 0,17.
- Givet disse værdier kan udledes udføres. Antag, at vi får et nyt billede (fig. 9), og opgaven er at bestemme sin kategori etiket. Dette udføres som følger:
- Vi fastslå, om funktionen F er til stede i billedet, som beskrevet i (6.3.1) - (6.3.3). I vores tilfælde, det featur er til stede, så F = 1.
- Ved hjælp af ligningerne (1) og (2), og værdierne beregnet i (6.7.5) - (6.7.6), kan vi beregne, at p (C = K | F = 1) = 0,42 og p (C = L | F = 1) = 0,17.
- I betragtning af denne information, er det rationelt at konkludere, at billedet er fra kategori K, med relativt lav tillid.
- Det kunne være interessant og nyttigt at afprøve en sådan tilgang i et biologisk system (sige, psychophysically). I dette tilfælde kan adfærdsmæssige forudsigelser foretages og sammenlignes med de beregningsmæssige resultater som dem opnået i (6.8.2). For at lave præcise forudsigelser, gode estimater af p (F | C) er nødvendige. Sådanne skøn kan imidlertid være vanskeligt at opnå for velkendte objekter. Årsagen er, at et individs estimat af p (F | C) ikke kan observeres direkte, og det er yderst vanskeligt at beregne det da emnet'S forudgående eksponering for naturlige billeder er ukontrollerbar og ukendt. I modsætning hertil, hvis digitale embryoner anvendes til forsøgene er det muligt præcist at kontrollere, hvilke embryoner og embryo kategorier emnet udsættes for. Dette gør det nemt at beregne de mængder af interesse fra nøjagtig de samme data emnet blev udsat for. Det faktum, at embryoner «udseende er naturalistisk er nyttigt, fordi det gør det sandsynligt, at motivet bruger den samme kategorisering strategi som med naturlige kategorier.




Representative Results
VM kan anvendes til at generere en praktisk talt ubegrænset forsyning af hidtil ukendte 3-D figurer. Nogle eksemplariske digitale embryoer frembragt ved hjælp af VM algoritme er vist i det nedre panel i fig. 1. Hver af disse 16 embryoer blev dannet ved hjælp af "growEmbryos.exe-programmet i de digitale embryo værktøjer til Cygwin (se tabel 1) i 40 vækst cyklusser. Alle andre vækstparametre blev sat internt af programmet. De fleste af disse parametre var konstant (dvs. identiske fra den ene embryon til den næste). Nogle få parametre som placering og styrke af morfogen kilder, var tilfældige parametre internt af programmet uafhængigt for hver kørsel. Formen variationer blandt disse 16 embryoer opstod udelukkende som følge af variationer i disse tilfældige parametre.
Nogle eksempler på overfladen teksturering 34,35 anvender nogle vilkårligt valgte teksturer er vist i figur 2A. Visuelle scener i enrbitrary kompleksitet kan oprettes ved hjælp af et kommercielt tilgængeligt 3-D-modellering og rendering miljø, som vist i figur 2B.
En repræsentant "stamtræ" genereret af VP hjælp af digitale embryoner er vist i figur 3. Sammenlignelige træer kan også konstrueres under anvendelse af andre objekter end digitale embryoner, som vist i figur 4. Bemærk, at i begge tilfælde, de objekter, deler en fælles forfader ligefrem udgør en kategori, selv om forsøgslederen kan også vælge at definere en kategori som alle andre sæt af objekter. Det er værd at bemærke fra figur 4, at vores nuværende gennemførelse af VM og VP algoritmer tendens til at frembringe relativt glatte, buede overflader, i modsætning til hakkede eller flade objekter. Det er også værd at bemærke, at dette er formentlig den begrænsning af vores implementation af disse algoritmer og ikke de algoritmer selv, kan da biolological processer producere målts med plane flader og takkede konturer (f.eks., rose blad).
Figur 5 og 6 viser de typiske resultater af to metoder, der kan anvendes i tillæg til eller i stedet for, VP for at skabe principielle variationer i objekt form og objekt kategorier.
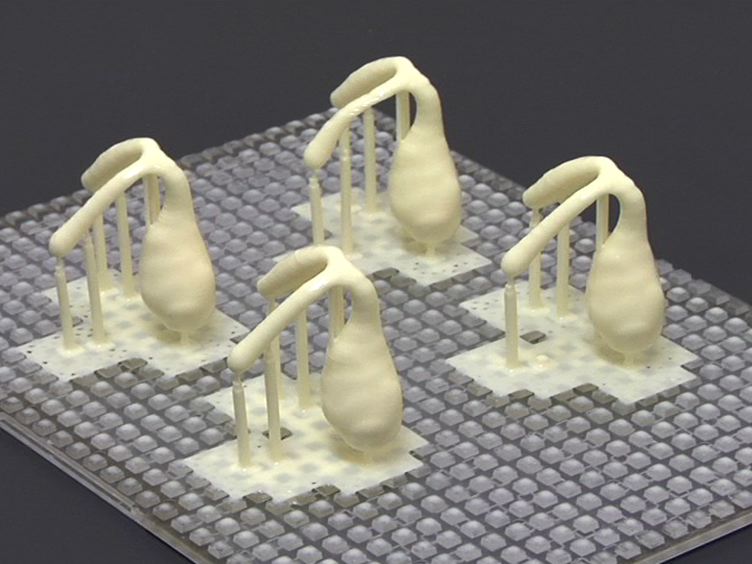
Toppanel Figur 7 illustrerer visuelle gengivelser af to digitale embryoner, og det nederste panel af figur 7 illustrerer de tilsvarende udskrifter frembragt af et kommercielt tilgængeligt 3-D Prototyper.
Figur 8 og 9 illustrerer procedurerne beskrevet i afsnit 6 for at bruge billed-fragmenter til at kategorisere et givet synlige objekt.

Figur 1. Virtuel morfogenese. 14. Digitale embryoer kan genereres ved at simulere en eller flere af nogle af de centrale processer af biologisk embryogenese: morfogen-medieret celledeling, cellevækst, cellebevægelse og programmeret celledød 7,8,36,37. Hver kørsel starter med en ikosaeder (vist i det øverste felt), og genererer en unik embryo, afhængigt af VM parameterindstillinger (eller "genotype") i nævnte embryo. Således de 16 embryoner i bundpanelet have forskellige former, fordi de alle har forskellige genotyper. Bemærk, at enklere og mere komplekse former kan genereres efter behov (fx til optimalt at stimulere neuroner ved et givet niveau af den visuelle hierarki) ved manipulering af genotypen af embryoet. Alle de førnævnte embryogenetic processer bortset programmeret celledød blev simuleret ved generering af embryoner vist. Simuleret programmeret celledød er isærnyttige til at skabe målrettede fordybninger (ikke vist).

Figur 2. Oprettelse af visuelle stimuli ved hjælp af digitale embryoer. Som enhver virtuelle 3-D objekt, kan digitale embryoner grafisk manipuleres til at skabe visuelle scener af vilkårlig kompleksitet ved hjælp af enhver standard 3-D grafisk toolkit. Denne figur illustrerer nogle almindelige manipulationer. (A) Det samme digitale embryo er tekstureret ved hjælp af mange forskellige teksturer, og tændte fra en usynlig lyskilde øverst til venstre. (B) En camoufleret scene er skabt ved at ændre størrelsen og omlægge den digitale embryo og digitalt placering op ad den samme baggrund var det tekstureret med. Den digitale embryo kan findes i 'plain view' i nederste højre kvadrant. For yderligere eksempler på visuelle stimuli created ved hjælp af digitale embryoner, se ref. 9,10,12-14,38.

Figur 3. Oprettelse af digitale embryo kategorier ved VP. VP Algoritmen emulerer biologisk evolution, idet der i begge tilfælde, nye objekter og objekt kategorier fremstå som arvelige variationer akkumuleres selektivt. Ved hver generation G i, avle udvalgte embryoner, der fører til generation G i +1. Afkommet arver form kendetegn ved deres forældre, men tilfalder form variationer af deres egen (som bestemt ved små variationer i deres genotype) som de udvikler. Denne figur viser en »stamtræ« af tre generationer af efterkommere startende fra en enkelt fælles forfader, en ikosaeder. Bemærk, at i dette tilfælde, formen kompleksiteten stiger fra ikosaeder til generereion G 1, men ikke fra G 1 og fremefter. Dette skyldes stigning i celleantal (dvs.., Celledeling) lodes fra ikosaeder til generation G 1, men ikke fra G1 fremefter. I almindelighed tendens celledeling at forøge form kompleksitet, mens andre morfogenetiske processer som cellebevægelse og cellevækst ændre form uden at ændre den samlede kompleksitet af formen.

Figur 4. VP ved hjælp af virtuelle objekter end digitale embryoner. Dette tal bidrager til at illustrere det generelle princip om, at virtuelle objekter, bortset fra digitale embryoner kan bruges som input til VP. VP algoritme i sin nuværende form kan operere på alle virtuelle 3-D objekt, hvis overflade består udelukkende af trekanter. Generation G 1 COMPRISed af (fra venstre til højre) et græskar, diamant, ansigtsmaske, æble, rock og kaktus. Bemærk, at objekterne i generation G 1 i denne figur ikke har en fælles forfader, fordi VP ikke kræver det. Objekter i G 2 og G 3 repræsenterer efterkommere af klippen i G 1. Ingen celledelinger var tilladt i enhver generation, således at alle form variationer opstod udelukkende fra bevægelsen og / eller vækst af de enkelte "celler" af den givne objekt.

Figur 5. Ved hjælp morphing til at udjævne variationer i formen. Morphing indebærer at tage to givne objekter (længst til venstre og længst til højre embryo i denne figur) og beregningen af de mellemliggende objekter (mellemliggende embryoner) ved at interpolere mellem de tilsvarende knudepunkter af de to udpegeded objekter. I det viste tilfælde blev alle vertices interpoleret under anvendelse af samme skalar faktor, hvilket resulterer i en lineær morphing. Det er imidlertid også muligt at morph genstandene ikke-lineært (ikke vist). Morphing er beregningsmæssigt ligetil, når der er fuldkommen en-til-en overensstemmelse mellem de knudepunkter af to objekter, som i det viste tilfælde. Men det er muligt i princippet at morph mellem to givne virtuelle objekter uanset om deres toppunkter svarer nøjagtigt, selv om der ikke findes noget principiel metode til at gøre dette 17,18.

Figur 6. Brug de vigtigste komponenter til at skabe glatte variationer i form. (A) Gennemsnit embryo. Denne foster er det det aritmetiske gennemsnit af 400 fostre (200 hver fra kategori K og L iFigur 3). Principale komponenter blev beregnet som beskrevet i trin 4.3. Bemærk, at hovedkomponenter repræsenterer hinanden uafhængige, abstrakt form dimensioner af de 400 embryoner (ikke vist) 25,26. 400 fostre udbytte 399 ikke-nul hovedkomponenter 25,26, som tilsammen tegner sig for hele variansen, eller formen information, som er tilgængelig kollektivt i embryoner. Pr. konvention er hovedkomponenter arrangeret i faldende rækkefølge efter deres egenværdier, eller den andel af den samlede varians de forklarer 25,26. I dette tilfælde henholdsvis de første to hovedkomponenter tegnede sig for 73% og 19% af den form oplysningerne i de 400 fostre. (B) Embryoner, der repræsenterer forskellige vægte (eller mere præcist, vægtede egenværdier) af Principal Component 1. De vægte varierede fra +2 (længst til venstre) til -2 (yderst til højre) i lige store trin på -0,2. (C) Embryoner, der repræsenterer forskellige vægte af Principal component 2. Vægtene også varierede fra +2 (længst til venstre) til -2 (yderst til højre) i lige store trin på -0,2. Bemærk at manipulere hovedkomponenter ikke udelukkende manipulere en given specifik legemsdel af embryo (f.eks., Vinger embryoet i det viste tilfælde). Om nødvendigt, kropsdele af virtuel 3D-objekter kan manipuleres i en vilkårlig brugerdefinerede måde ved anvendelse af de fleste af de kommercielt tilgængelige 3-D modellering miljøer (ikke vist).

Figur 7. Oprettelse af haptiske objekter. Virtual 3-D genstande kan "printes" som haptiske objekter ved hjælp af en standard, kommercielt tilgængelig 3-D 'printer' eller Prototyper. Denne figur viser digitale embryoner, der leveres som visuelle objekter (øverste række), eller som de tilsvarende haptiske objekter (nederste række). Haptikken objekter shown i denne figur blev trykt til at være ca 6 cm bred (skala bar = 1 cm), selvom objekterne kan udskrives på meget mindre eller større størrelser.

Figur 8. En skabelon for et eksempel informativ fragment. I dette eksempel er skabelonen en tærskel på 0,69 forbundet med det.

Figur 9. Et nyt billede, som objektet kategori er ikke kendt og skal bestemmes.
Discussion
Nytten af VM og VP i kognitiv videnskab Research
Vi har tidligere beskrevet nytten af VM og VP i detaljer l9 ,10,12-14. Kort fortalt VM, især den digitale embryo metoden, er nyttigt, fordi det giver en principfast og fleksibel metode til at skabe roman, men naturalistiske 3-D genstande 14. Tilsvarende VP giver en principiel metode til at skabe naturalistiske kategorier 9,10,12,13. Det er værd at bemærke, at objekt kategorier genereret af VP deler mange træk med objekt kategorier i naturen, herunder det faktum, at de kategorier tendens til at være hierarkisk i naturen, og funktionen variationer inden for og på tværs af kategorier opstår uafhængigt af forsøgslederen og de algoritmer for at klassificere dem 39.
Aktuelle Begrænsninger og fremtidige retninger
Tre nuværende begrænsninger i vores protokol og de retninger for det fremtidige arbejde, de foreslårer særligt bemærkelsesværdige: For det første, både VM og VP simulere biologiske processer. Mens vi viser, at ikke-biologiske virtuelle objekter kan bruges som substrater for disse processer, de underliggende processer er stadig biologisk motiveret. Men naturlige objekter - biologiske og ikke-biologiske både - undergår formændringer på grund af ikke-biologiske kræfter. For eksempel kan sten ændrer form på grund af geologiske processer såsom erosion eller sedimentation. Nye kategorier af sten kan opstå fra andre sådanne geologiske processer. Det bør være relativt enkelt at inkorporere disse processer i repertoire af tilgængelige formændring algoritmer.
Den anden større begrænsning af vores protokol er, at den nuværende repertoire af dynamiske formændringer er ret begrænset. Det er ønskeligt at inkorporere et større array af formændringer, såsom biologiske bevægelse, eller bevægelse på grund af ydre kræfter, såsom vind, vand eller tyngdekraft. Vi forventer, at det will være forholdsvis ligetil at bringe til at bære de kendte computeranimation algoritmer til at gennemføre sådanne dynamiske formændringer.
Den tredje store begrænsning af vores protokol er, at VM i øjeblikket ikke omfatter mange andre kendte morfogenetiske processer, herunder, især, gastrulation 36. Det kan heller ikke optage nogle kendte begrænsninger, såsom at morfogenese i planter medieres udelukkende af vækst, med lille eller ingen cellebevægelse muligt, fordi cellevæggene 36. Heller ikke VP ikke andre kendte fylogenetiske processer såsom genetisk drift 40. Håndtering af disse begrænsninger ville hjælpe i høj grad lette brugen af vores protokol i udviklingsmæssige, økologiske og evolutionære simuleringer.
Disclosures
Ingen interessekonflikter erklæret.
Acknowledgments
Dette arbejde blev støttet delvist af den amerikanske hær Research Laboratory og den amerikanske hær Research Office tilskud W911NF1110105 og NSF tilskud IOS-1147097to Jay Hegdé. Der blev også leveret af en pilot tilskud til Jay Hegdé fra Vision Discovery Institute of Georgia Health Sciences University. Daniel Kersten blev støttet af tilskud onr N00014-05-1-0124 og NIH R01 EY015261 og dels ved WCU (World Class University) program finansieret af Ministeriet for Uddannelse, Videnskab og Teknologi gennem National Research Foundation of Korea (R31-10008 ). Karin Hauffen blev støttet af Undergraduate Research elevprogram (URAP) i den amerikanske hær.
Materials
| Name | Company | Catalog Number | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. | |||
References
- Palmeri, T. J., Gauthier, I. Visual object understanding. Nat. Rev. Neurosci. 5, 291-303 (2004).
- Seger, C. A., Miller, E. K. Category learning in the brain. Annu. Rev. Neurosci. 33, 203-219 (2010).
- Perceptual Learning. Fahle, M., Poggio, T. , MIT Press. (2002).
- Ashby, F. G., Maddox, W. T. Human category learning. Annu. Rev. Psychol. 56, 149-178 (2005).
- Gauthier, I., Tarr, M. J. Becoming a "Greeble" expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Fragment-based learning of visual categories. Bart, E., Hegdé, J., Kersten, D. Cosyne 2008 Conference, 2008 Feb 28-Mar 2, Salt Lake City, , Cosyne. Salt Lake City. 121-12 (2008).
- Ball, P. Nature's patterns : a tapestry in three parts. , Oxford University Press. (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D. Bootstrapped learning of novel objects. J. Vis. 3, 413-422 (2003).
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M. Feature-based volume metamorphosis. SIGGRAPH. , 449-456 (1995).
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. Numerical geometry of non-rigid shapes. , Springer. (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. Pattern classification. , 2nd edn, Wiley. (2001).
- Bishop, C. M. Pattern recognition and machine learning. , Springer. (2006).
- Theodoridis, S., Koutroumbas, K. Pattern recognition. , 3rd edn, Academic Press. (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , 4th edn, W.H. Freeman and Co. (2011).
- Tuffery, S. Data mining and statistics for decision making. , Wiley. (2011).
- Crawley, M. J. Statistical Computing: An Introduction to Data Analysis using S-Plus. , Wiley. (2002).
- Venables, W. N., Ripley, B. D. Modern Applied Statistics with S. , Springer. (2003).
- Beier, T., Neely, S. Feature-based image metamorphosis. SIGGRAPH. 26, 35-42 (1992).
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. Warping and morphing of graphical objects. , Morgan Kaufmann Publishers. (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , IEEE Computer Society Press. (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. Computer graphics. , Nova Science Publishers. (2011).
- Lengyel, E. Mathematics for 3D game programming and computer graphics, third edition. , 3rd Ed, Cengage Learning. (2011).
- Gilbert, S. F. Developmental biology. , 9th edn, Sinauer Associates. (2010).
- Gilbert, S. F., Epel, D. Ecological developmental biology : integrating epigenetics, medicine, and evolution. , Sinauer Associates. (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E. Categorization of natural objects. Annual Review of Psychology. 32, 89-115 (1981).
- Futuyma, D. J. Evolution. , 2nd edn, Sinauer Associates. (2009).