Summary
אנו מתארים מתודולוגיה חדשנית ליצירת אובייקטים 3-D נטורליסטי וקטגוריות אובייקט עם וריאציות תכונה הוגדרו במדויק. אנו משתמשים בסימולציות של התהליכים הביולוגיים של המורפוגנזה ותולדות גזע ליצירת אובייקטים חדשים, נטורליסטי וירטואליים 3-D וקטגוריות אובייקט כי אז יכול להיות שניתנו כדימויים חזותיים או אובייקטי Haptic.
Protocol
1. יצירת אובייקטים וירטואליים מן הטבע 3-D באמצעות VM
- כדי ליצור עוברים דיגיטליים, השתמש בסדנת העובר הדיגיטלית (הטל; ראה טבלה 1). כל ריצה יוצרת עובר יחיד 14, הצורה שהיא ייחודית לקבוצת נתונה של הגדרות (או 'גנוטיפ') המשמשות לטווח הנתון (איור 1). את 'התאים' של העובר מיוצגים כמשולשים 14.
- להפעיל את התכנית כמספר פעמים דרושות כדי ליצור את המספר הרצוי של עוברים.
- אם צורות מורכבות יותר הן רצויות, להגדיל את מספר מחזורי צמיחה, כלומר את מספר פעמים את תאיו של העובר יחלקו. שימו לב שזה גם יהיה להאט את התכנית. אם יש צורך ליצור אובייקטים וירטואליים אחרים מאשר עוברים דיגיטליים, להשתמש בכלי דוגמנות 3-D זמינים מסחרי או לקבל חפצים וירטואליים מספקים מסחריים (טבלה 1).
- זה בדרך כלל מומלץ לשמור את האובייקט הווירטואליs בפורמט נפוץ קובץ, כגון OBJ, כך שהאובייקטים ניתן לייבא בקלות לתוך ערכת כלי דוגמנות 3-D מסחרית. לצורך כך, כותב טל אובייקטים בפורמט OBJ כברירת מחדל.
- גירויים חזותיים יכולים להיות שנוצרו באמצעות אחת או יותר עוברים דיגיטליים באמצעות מודלים 3-D וסביבת טיוח (טבלה 1). השתמש בפעולות גרפיות סטנדרטיות כגון שינוי הכיוון, גודל, תאורה, מרקם והרקע כדי ליצור את הגירוי הרצוי (ראה איור 2).
2. יצירת קטגוריות עצמים מן הטבע באמצעות סמנכ"ל
- כדי ליצור קטגוריות אובייקט, לייצר צאצאים (או 'ילדים') של אובייקט האב קדמון המסוים (או 'הורה') באמצעות שילוב רצוי של התהליכים בשלב 1.1 לעיל (איור 3) 9,10,12,13.
- חלק מהשיטות מתוארות להלן ליצירת וריאציות חלקות צורה, כגון מורפינג או מרכיבים עיקריים (ראה את שלבי 3 ו 4 להלן), העבודה Bettאה, אם כל אובייקטי הקלט יש מספר הזהה של תאים ואם יש התאמה של אחד לאחד בין הקודקודים של האובייקטים. ליצירת אובייקטים כאלה, להשתמש רק באותם תהליכי VM שלא לשנות את מספר התאים וישמרו על ההתאמה של אחד לאחד מקודקודים בין האובייקטים (ראה, למשל, דורי G 2 עד 3 G באיור 3). למשל, חלוקת תאים ומות תאים מתוכן לשנות את מספר התאים, ולעשות את זה הרבה יותר קשה (אם כי לא בלתי אפשרי 17,18) כדי לקבוע התאמה של אחד לאחד בין הקודקודים של זוג נתונה של אובייקטים.
שים לב שהתהליכים המשנים את מספר התאים באובייקט נתון גם לשנות את צורתו המורכבות. באופן כללי, המספר הגדול יותר של תאים, המורכבות הגדולות יותר צורה של האובייקט וחלק פני השטח שלו. - אם חפצים דרושים, וירטואליים אחרים מאשר עוברים דיגיטליים יכולים לשמש כתשומות לסמנכ"ל (איור 4).
- חלק מהשיטות מתוארות להלן ליצירת וריאציות חלקות צורה, כגון מורפינג או מרכיבים עיקריים (ראה את שלבי 3 ו 4 להלן), העבודה Bettאה, אם כל אובייקטי הקלט יש מספר הזהה של תאים ואם יש התאמה של אחד לאחד בין הקודקודים של האובייקטים. ליצירת אובייקטים כאלה, להשתמש רק באותם תהליכי VM שלא לשנות את מספר התאים וישמרו על ההתאמה של אחד לאחד מקודקודים בין האובייקטים (ראה, למשל, דורי G 2 עד 3 G באיור 3). למשל, חלוקת תאים ומות תאים מתוכן לשנות את מספר התאים, ולעשות את זה הרבה יותר קשה (אם כי לא בלתי אפשרי 17,18) כדי לקבוע התאמה של אחד לאחד בין הקודקודים של זוג נתונה של אובייקטים.
- את האובייקטים בתוך קטגורית נתונה ניתן לבחור יותר כדי להשיג הפצת נתונה של תכונות 19. לדוגמה, אפשר לחסל באופן סלקטיבי אובייקטים בינוניים מקטגוריה ניתנה על מנת ליצור חלוקת bimodal של גודל אובייקט.
- אין שיטה אחת שהיא אוניברסלי אופטימלי למדידת מידע הצורה הזמינה לכל הקטגוריות, וגם אין שיטה אחת ויחידה שהיא אופטימלי לסיווג כל האובייקטים 20-22. לפיכך, experimentor חייבת לבחור שיטות אלה בהתבסס על הקטגוריות ומטרות חישוביות ביד 20-22. שלב 4 מתאר שיטה נפוצה לטיפול בהיבטים שונים של מידע צורה זמינה.
- הדמיון בין זוג נתון של קטגוריות ניתן למדוד באופן אובייקטיבי באמצעות שיטות פילוגנטי זמינות 23,24. לדוגמה, מרחק האנכי (או "אבולוציוני") בין זוג נתון של קטגוריות, כפי שנמדד על ידי CL ההיררכיustering שיטות במחקר הסטטיסטי ערכת הכלים, הוא מדד אובייקטיבי של דמיון קטגוריה 25,26.
3. שיטות נוספות ליצירת וריאציות: צורה דיגיטלית Morphing
- בהתחשב בכל זוג אובייקטים כך שכל קודקוד של אובייקט אחד מתאים בדיוק לקודקוד אחד של אובייקט האחר (. כלומר, אובייקטים עם התאמה של אחד לאחד בין קודקודים), morphing הוא 17,18,27-29 פשוטים: בזה מקרה, וריאציות חלקות (או 'morphs') בין שני אובייקטים מיוצרים על ידי ביון בצורה חלקה בין הקודקודים והנורמלים (איור 5) המתאימים. בהתאם לזוג אובייקטים שנבחרו, morphing יגרום קטגוריות חדשות או ילדים נוספים במסגרת קטגוריה.
- האובייקטים המוצגים באיור 5 נוצרו באמצעות morphing 27-29 ליניארי. את החפצים ניתן morphed (או מעוות) על ידי מגוון רחב של טכניקות עיוות זמינות אחרות 17,18.
- כדי ליצור חלוקה רצויה של צורות morphed, לבחור את נקודתי אינטרפולציה בהתאם.
4. שיטות נוספות ליצירת וריאצית צורת מרכיבים עיקריים:
- על מנת להשתמש ברכיבים עיקריים ליצירת וריאציות צורה, צריך לקבוע את המרכיבים העיקריים 15 ראשונים. מרכיביו העיקריים הם ספציפיים לקבוצת הנתונה של אובייקטים המשמשים לקביעתם 26. לקבלת תוצאות טובות, יש להשתמש לפחות 30 אובייקטים עם התאמה של אחד לאחד בין קודקודים 26.
- צור אובייקט ממוצע מקבוצה רצויה של אובייקטי קלט n, על ידי מיצוע הקואורדינטות ונורמליות של כל קודקוד בכל האובייקטים בנפרד. לכן, x תיאום של k קודקוד נתון צריך להיות ממוצע של x קואורדינטות של קודקוד k של כל אובייקטי n, וכן הלאה.
- השתמש בפונקצית Matlab princompכדי לקבוע רכיבים עיקריים של אובייקטי n. זה יפיק n 1-וקטורים עצמיים אינם אפס, יחד עם n-1 ערכים העצמיים המתאימים 26.
- כדי ליצור אובייקט חדש j ממרכיב עיקרי ניתן P i, להכפיל P i על ידי ערך העצמי λ אני מתאים והרצוי במשקל w j ולהוסיף לפריט הממוצע:
J = + w j λ i P i - כל הייחודי w j יפיק אובייקט ייחודי. על ידי שינוי w בצורה חלקה, ניתן ליצור וריאציות צורה חלקות לאורך מרכיב עיקרי נתון.
- כדי ליצור וריאציות צורה לאורך ממד צורה עצמאית, חזור על השלב 4.4 באמצעות מרכיב עיקרי שונה.
- כדי ליצור חלוקה רצויה של צורות לאורך מרכיב עיקרי נתונה, השתמש חלוקה הרצויה של W. </ Li>
- כדי ליצור רשת רבה ממדית של צורות, להשתמש בערכה של משקולות לכל אחד ממספר המרכיבים עיקריים:

5. יצירת גרסות haptic של 3-D אובייקטים
- אובייקטי 3-D "תדפיס" באמצעות 3-D prototyper (או 3-D "המדפסת"). אם יש צורך, להתאים את גודלו של האובייקט ולהחליק את פני השטח של האובייקט לפני ההדפסה.
6. יישום דוגמה מובהקת: הסקת ייס של קטגורית תמונה
- משימה חשובה בעיבוד חזותי להסיק קטגוריה שאליה משתייך אובייקט נצפה נתון. למרות שהמנגנון המדויק של היסק זה אינו ידוע, יש גם ראיות חישובית ופיסיולוגיות 9,12,13,30-32 שזה כרוך בשימוש במידע אודות תכונות ידועות של האובייקט בתמונה ניתן להסיק הקטגוריה של האובייקט. כאן, אנו illustrate איך תהליך היקש זה עשוי לעבוד במסגרת ייס, וכמה עוברים דיגיטליים עשוי להיות שימושי עבור מחקר בתחום זה.
- לשם פשטות, נניח כי המשימה היא הסיווג בינארי וכרוך K קטגורית הבחנה מקטגורית L (איור 3). בואו להיות C משתנה הקטגוריה. אנו להסיק כי C = K או C = L לפי אם התמונה הנצפית אני שייך לקטגוריה K או L. גישה אופיינית לסיווג כרוך:
- חישוב ההסתברות שהקטגוריה היא K קבל את המידע בתמונה, מסומן עמ (C = K | אני);
- חישוב ההסתברות שהקטגוריה היא L נתון מידע בתמונה, מסומן עמ (C = L | אני); ו
- בחירת הקטגוריה עם ההסתברות הגבוהה יותר.
- בשלב הבא, אנו מניחים לפשטותשיש בדיוק תכונת F ינארי אחד. תכונה זו עשויה להיות נוכחת בתמונה (מסומן F = 1) או נעדר מהתמונה (מסומן F = 0). דוגמה זו תשתמש בתכונה 'אינפורמטיבי הבר' מוצגת באיור 8. שברי מידע שתוארו לראשונה על ידי אולמן ועמיתים 33. במקרה הנוכחי, אנו נשתמש בתבנית התמונה מוצגת באיור 8 כתכונה, וערך סף של 0.69. כדי לקבוע אם תכונה זו קיימת בתמונת נתונה (למשל, התמונה הימנית ביותר בשורת G3 באיור 3), ישתמשו בצעדים הבאים:
- הסט תבנית זו על כל המקומות האפשריים בתמונה ולחשב, בכל מיקום, הערך המוחלט של מתאם צלב מנורמל בין התבנית ותמונת משנה הבסיסית.
- בחר את מיקום תמונה עם הערך הגבוה ביותר (0.60 במקרה הנוכחי).
- אם ערך זה הוא מעל הסף, מסיקשהתכונה קיימת, אחרת להסיק כי הוא נעדר. במקרה שלנו, מאחר שהמתאם הגבוה ביותר הוא 0.60 מתחת לסף של 0.69, אנו מסיקים שהתכונה חסרה בתמונה זו.
- הרציונל של שימוש בתכונות אלה, והמנגנונים של בחירת תכונות וקביעת ערכי הסף שלהם הם מעבר להיקף של דו"ח זה, אך מתואר בפירוט בשופטים. 33, 30.
- במסגרת הסקת תכונה מבוססת, אנו מניחים כי כל מידע תמציות המתבונן מהתמונה כלול בערכה של תכונה זו, אני. דואר, שp (C | אני). = P (C | F).
לכן, המשימה הופכת שקביעת הערך של F בתמונת הנתונה (בהווה או נעדר), המחשוב עמ (C = K | F) ו-p (C = L | F) שלF הערך, ובחירה בקטגוריה עם probabi הגבוהlity. - במסגרת ייס,

לכן,
ו -

שים לב שהמכנה בשתי המשוואות היא אותו הדבר. לכן, כדי להשוות עמ (C = K | F) ו-p (C = L | F), אין צורך לחשב את המכנה, אלא די בכך כדי לחשב את הכמויותעמ (C = K | F) α p (C = K) p (F | C = K)
ו -
עמ (C = L | F) α p (C = L) p (F | C = L)
הese נקרא לעתים "הסתברויות unnormalized '. עמ הטווח (C) נקרא 'לפני' ועמ הטווח (F | C) נקרא 'סבירות ".- לשם פשטות, נניח "שטוח" לפני: p (C = K) = P (C = L) = 0.5.
- המשימה היא עכשיו לחשב P (F | C), ההסתברות של ערך תכונה שניתן בדמותו של C קטגוריה מסוימת.
- אנו נשתמש בשש תמונות של קטגורית L (איור 3) כדוגמה לחישוב p (F = 1 | C = L), ההסתברות שהתכונה נמצאת בתמונה של L קטגוריה.
- כדי לחשב p (F = 1 | C = L), לקחת את כל תמונות אימונים ששייכות לליטר 1. שוב, אלה מוצגים באיור 3.
- עבור כל תמונה, לקבוע אם ערך התכונה הוא 1 (הווה) או 0 (נעדר), כפי שתוארו ב( 6.3.1) - (6.3.3). במקרה שלנו, בשש התמונות באיור 3, את הערכים הם: [0, 0, 1, 0, 1, 0].
- לחשב איזה חלק מתמונות שבערך התכונה הוא 1. במקרה שלנו, זה הוא 2/6 = 0.33.
- לפיכך, עמ '(F = 1 | C = L) = 0.33. שימו לב שכדי לקבל אומדנים מדויקים, יש להשתמש בלפחות 30 תמונות לכיתה.
- באופן דומה, אנו יכולים לחשב שp (F = 0 | C = L) = 0.67, עמ '(F = 1 | C = K) = 0.83, עמ' (F = 0 | C = K) = 0.17.
- בהתחשב בערכים אלה, מסקנה יכולה להתבצע. תניח שאנחנו מקבלים תמונה חדשה (איור 9), והמשימה היא לקבוע תווית הקטגוריה שלו. זו מתבצעת באופן הבא:
- אנו קובעים אם תכונת F נמצא בתמונה, כפי שתואר ב( 6.3.1) - (6.3.3). במקרה שלנו, המכוערתמכשור הוא הווה, ולכן F = 1.
- שימוש במשוואות (1) ו - (2), ואת הערכים שחושבו ב( 6.7.5) - (6.7.6), אנחנו יכולים לחשב שp (C = K | F = 1) = 0.42 ו-p (C = L | F = 1) = 0.17.
- בהתחשב במידע זה, זה הגיוני להסיק שהתמונה היא מקטגורית K, עם ביטחון נמוך יחסית.
- זה יכול להיות מעניין ושימושי לבדיקת גישה כזו במערכת ביולוגית (יניחו, psychophysically). במקרה זה, תחזיות התנהגותיות יכולות להתבצע והשוואה מול התוצאות חישוביים, כגון אלה שהושגו ב( 6.8.2). כדי לספק תחזיות מדויקות, הערכה טובה של p (F | C) הם הכרחיים. הערכות אלה, עם זאת, עשויות להיות קשות להשגה לחפצים מוכרים. הסיבה לכך היא שהאומדן של p של הנושא (F | C) אינו משתקף ישירות, וזה מאוד קשה לחשב אותו מאז את הנושאחשיפה המוקדמת של "לתמונות טבעיות היא בלתי נשלטת ובלתי ידועה. לעומת זאת, אם עוברים דיגיטליים משמשים לניסויים, אז זה אפשרי לשלוט במדויק שעוברים וקטגוריות עובר הנושא חשוף ל. זה עושה את זה קל לחשב את הכמויות של ריבית מבדיוק את אותם נתונים בנושא נחשף ל. העובדה שההופעה 'העוברים היא נטורליסטי היא מועילה, שכן היא עושה את זה סביר להניח כי הנושא הוא באמצעות אותה אסטרטגית קטגוריזציה כעם קטגוריות טבעיות.




Representative Results
VM יכול לשמש כדי ליצור היצע כמעט בלתי מוגבל של צורות רומן 3-D. כמה עוברים דיגיטלי מופת שנוצרו באמצעות אלגוריתם VM מוצגים בפנל התחתון של האיור 1. כל 16 העוברים האלה נוצרו באמצעות התכנית 'growEmbryos.exe' בכלים הדיגיטליים עבור עובר Cygwin (ראה טבלה 1) עבור 40 צמיחה מחזורים. כל פרמטרי צמיחה האחרות נקבעו באופן פנימי על ידי התכנית. רוב הפרמטרים האלה היו קבועים (כלומר, זהים מעובר אחד למשנו). כמה פרמטרים כגון מיקום ועוצמת מקורות morphogen, היו פרמטרים אקראיים שנקבעו פנימי על ידי התכנית באופן עצמאי לכל סיבוב. וריאציות הצורה בקרב 16 עוברים אלה נבעו אך ורק כתוצאה מהשינויים בפרמטרים האקראיים האלה.
כמה דוגמאות של משטח טקסטורות 34,35 בעזרת כמה מרקמים נבחרו באופן שרירותי מוצגות באיור 2 א. סצנות חזותיות שלמורכבות rbitrary ניתן ליצור באמצעות מודלים זמינים מסחרי 3-D וסביבת טיוח, כפי שמוצגים באיור 2 ב.
"עץ המשפחה" נציג שנוצר על ידי שימוש בעוברי סמנכ"ל דיגיטליים מוצג באיור 3. עצים דומים גם ניתן לבנות באמצעות אובייקטים אחרים מעוברים דיגיטליים, כפי שמוצגים באיור 4. שים לב כי בכל מקרה, את החפצים שחולקים אב קדמון משותף ישיר מהווים קטגוריה, למרות שהניסוי יכול גם לבחור להגדיר את קטגוריה כמו כל סדרה אחרת של אובייקטים. ראוי לציין מאיור 4 שהיישום הנוכחי שלנו של אלגוריתמי הסמנכ"ל VM ונוטה לייצר משטחים חלקים יחסית, מעוגלים, בניגוד לאובייקטים משוננים או שטוחים. כמו כן ראוי לציין שזה כנראה ההגבלה של היישום של האלגוריתמים האלה שלנו ולא את האלגוריתמים עצמם, שכן תהליכי biolological יכול לייצר objecTS עם משטחים שטוחים וקווי מתאר משוננים (למשל., עלה ורד).
איורי 5 ו 6 מציג את התוצאות האופייניות של שתי שיטות שיכולות לשמש בנוסף, או במקום, סמנכ"ל ליצירת וריאציות עקרוניות בצורת אובייקט ואובייקט קטגוריות.
הפנל העליון של איור 7 ממחיש הדמיות חזותיות של שני עוברים דיגיטליים, והפנל התחתון של איור 7 ממחיש את התדפיסים המקבילים שנוצרו על ידי prototyper הזמין מסחרי 3-D.
איורים 8 ו 9 להמחיש את ההליכים המתוארים בסעיף 6 לשימוש שבברי תמונות כדי לסווג את אובייקט חזותי נתון.

איור 1. המורפוגנזה וירטואלית. 14. עוברים דיגיטליים יכולים להיות שנוצרו על ידי הדמיה אחד או יותר מחלק מהתהליכים ביולוגית המרכזיים של התפתחות עוברת: חלוקת morphogen בתיווך תא, גדילת תאים, תנועת תאים ומות תאים מתוכן 7,8,36,37. כל ריצה מתחילה באיקוסהדרון (שמוצג בפנל העליון), ומייצרת עובר ייחודי, בהתאם להגדרות פרמטר VM (או 'גנוטיפ') של העובר. לפיכך, 16 העוברים בפנל התחתון יש צורות שונות, כי לכולם יש גנוטיפים שונים. שים לב שצורות פשוטות או מורכבות יותר יכולות להיוצר במידת צורך (למשל, בצורה אופטימלית כדי לעורר נוירונים ברמת נתונה של ההיררכיה החזותית) על ידי המניפולציה של הגנוטיפ של העובר. כל התהליכים הנ"ל embryogenetic מלבד מות תאים מתוכן היו מדומים ביצירת העוברים הראו. מות תאים מתוכן מדומה הוא בעיקרשימושי ליצירת חריצים ממוקדים (לא מוצג).

איור 2. יצירת גירויים חזותיים לשימוש בעוברים דיגיטליים. כמו כל אובייקט 3-D וירטואלי, עוברים דיגיטליים ניתן לטפל גרפי כדי ליצור סצנות חזותיות מורכבים שרירותי באמצעות כל ערכת כלים גרפית 3-D סטנדרטית. נתון זה ממחיש כמה מניפולציות נפוצות. () אותו העובר הדיגיטלי הוא מרקם שימוש במרקמים שונים ורבים, ומואר ממקור אור בלתי נראה בפינה שמאלית עליונה. (ב) מקום מוסווה נוצר על ידי שינוי גודל ומחדש orienting-העובר הדיגיטלי ו דיגיטלי הצבתו כנגד אותו הרקע שהיה עם מרקם. העובר הדיגיטלי ניתן למצוא ב'גלוי לעין 'ברבע הימני התחתונה. לדוגמאות נוספות של גירויים החזותיים created שימוש בעוברים דיגיטליים, ראה שופטים. 9,10,12-14,38.

איור 3. יצירת קטגוריות עובר דיגיטליות באמצעות סמנכ"ל. אלגוריתם הסמנכ"ל מחק אבולוציה ביולוגית, בכך שבשני המקרים, אובייקטים חדשים וקטגוריות אובייקט להתגלות כתורשתי וריאציות לצבור באופן סלקטיבי. בכל דור והדור G i, עוברים נבחרו להתרבות, מה שמוביל לדור G i +1. הצאצאים יורשים את מאפייני הצורה של הוריהם, אך יצברו וריאציות צורה משלהם (כפי שנקבע על ידי שינויים קטנים בגנוטיפ שלהם) שהם מפתחים. נתון זה מראה "עץ משפחה" של שלושה דורות של צאצאים החל מאב קדמון משותף אחד, עשרימון. שים לב, במקרה זה, את העליות ממורכבות צורת עשרימון לgeneratיון G 1, אבל לא מואילך G 1. הסיבה לכך היא עלייה במספר תאים (כלומר., חלוקת תא) הותרה מעשרימון לדור G 1, אבל לא מואילך G 1. באופן כללי, חלוקת תא נוטה להגדיל מורכבות צורה, ואילו תהליכים המוךפו"גנטי אחרים כגון תנועת תא ומשנה את צורת גדילת תא מבלי לשנות את המורכבות הכוללות של הצורה.

איור 4. סמנכ"ל באמצעות אובייקטים וירטואליים אחרים מאשר עוברים דיגיטליים. נתון זה עוזר להמחיש את העיקרון הכללי שאובייקטים וירטואליים אחרים מאשר עוברים דיגיטליים יכולים לשמש כקלט לסמנכ"ל. אלגוריתם הסמנכ"ל במתכונתו הנוכחית יכול לפעול על כל אובייקט 3 D-וירטואלי משטח שמורכב אך ורק של משולשים. דור G 1 comprisעורך של (משמאל לימין) דלעת, יהלומים, מסיכת פנים, תפוח, רוק, וקקטוס. שים לב שהעצמים בG 1 דור בנתון זה אין לי אב קדמון משותף, כי הסמנכ"ל לא דורש את זה. אובייקטים בG 2 ו 3 G מייצגים צאצאים של הסלע בG 1. אין חלוקות הורשו בכל דור ודור, כך שכל וריאציות הצורה התעוררו רק מתנועה ו / או צמיחה של 'התאים' הבודדים של האובייקט הנתון.

איור 5. באמצעות morphing ליצור וריאציות חלקות בצורה. Morphing כרוך לוקח שני אובייקטי נתונים (שמאל קיצוני וימין קיצוני עובר בנתון זה) וחישוב אובייקטי ביניים (להתערב עוברים) על ידי ביון בין הקודקודים המקבילים של 2 המיועדיםאובייקטי ד. במקרה שמוצג, כל הקודקודים היו אינטרפולציה באמצעות אותו גורם סקלרי, וכתוצאה מmorphing ליניארי. עם זאת, ניתן גם morph את האובייקטים שאינם ליניארי (לא מוצג). Morphing הוא מחשוב ישיר כאשר יש התאמה של אחד לאחד מדויקת בין הקודקודים של שני אובייקטים, כמו במקרה שמוצג. עם זאת זה אפשרי, בעיקרון, למורף בין כל שני חפצים וירטואליים הניתנים ללא קשר האם קודקודיהם המתאימים בדיוק, אם כי אין שיטה ייחודית עקרונית לכך 17,18.

איור 6. שימוש ברכיבים עיקריים ליצירת וריאציות חלקות בצורה. () עובר ממוצע. עובר זה מייצג את ממוצע אריתמטי של 400 עוברים (200 כל אחת מהקטגוריות K ו-L באיור 3). רכיבים עיקריים חושבו כמתואר בשלב 4.3. שים לב שהמרכיבים עיקריים לייצג ממדים הדדיים עצמאיים, מופשטים צורה של 400 עוברים (לא מוצג) 25,26. 400 עוברים להניב 399 רכיבים שאינם אפס עיקרי 25,26, אשר ביחד חשבון עבור כל השונות, או מידע הצורה, זמין באופן קולקטיבי בעוברים. על פי מוסכמה, רכיבים עיקריים מסודרים לפי סדר היורד של הערכים העצמיים שלהם, או חלק מהשונות הכלליות הם מסבירים 25,26. במקרה זה, שני המרכיבים העיקריים 1 בהתאמה היוו 73% ו 19% מהמידע הזמין בצורה של 400 עוברים. (ב ') לעוברים המייצגים את משקלים שונים (או לייתר דיוק, ערכים עצמיים משוקללים) של רכיב עיקרי 1. את המשקולות משתנות מ+2 (שמאל הקיצוני) ל-2 (ימין קיצוני) בצעדים שווים של -0.2. (C) עוברים שמייצגים משקולות שונות של compon הראשיאף אוזן גרון 2. את המשקולות מגוונות גם מ+2 (שמאל הקיצוני) ל-2 (ימין קיצוני) בצעדים שווים של -0.2. שים לב שמניפולציה של מרכיבים עיקריים אינו בלעדית לשלוט בכל חלק מסוים של גוף נתון של העובר (למשל., הכנפיים של העובר במקרה שמוצגות). עם זאת, במידת צורך, חלקי גופות וירטואליות 3-D אובייקטים יכולים להשפיע בכל צורה שרירותית משתמש מוגדר באמצעות רוב סביבות 3-D מודלים הזמינות מסחרי (לא מוצג).

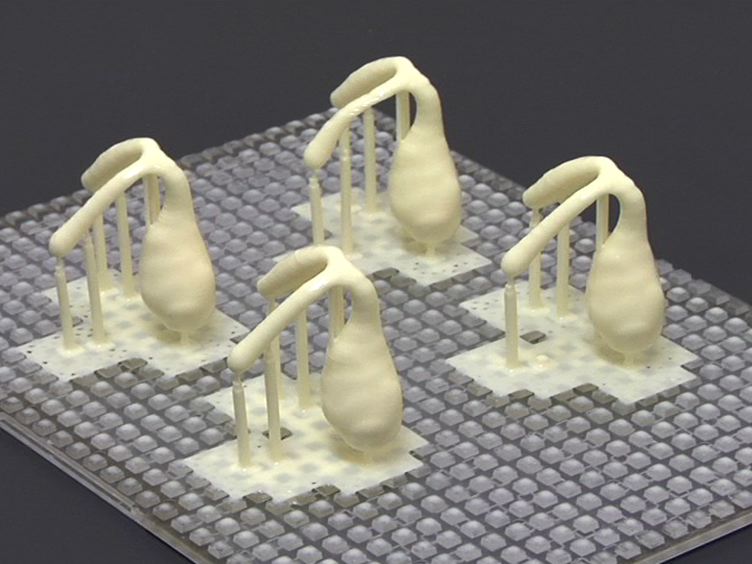
איור 7. יצירת אובייקטי Haptic. 3-D Virtual אובייקטים יכולים להיות 'מודפסים' כאובייקטי haptic באמצעות סטנדרטי, זמינים מסחרי 3-D "המדפסת" או prototyper. נתון זה מראה עוברים דיגיטליים שניתנו כאובייקטים חזותיים (שורה העליונה) או כאובייקטי haptic המתאימים (שורה התחתונה). ה-S אובייקטי haptichown בנתון זה הודפס להיות רחב כ 6 סנטימטר (סרגל קנה מידה = 1 סנטימטר), למרות שניתן להדפיס את האובייקטים בגדלים קטנים יותר או גדולים יותר.

איור 8. תבנית לבר אינפורמטיבי דוגמה. בדוגמה זו, את התבנית יש סף של 0.69 המשויכים אליו.

איור 9. תמונה חדשה שעבור קטגורית האובייקט אינה ידועה וצריך להיות נחושה.
Discussion
תועלת של VM וסמנכ"ל מחקר במדעים קוגניטיביים
כבר תארנו בעבר את התועלת של VM וסמנכ"ל בפירוט L9 ,10,12-14. בקצרה, VM, במיוחד המתודולוגיה העובר הדיגיטלית, הוא שימושי משום שהיא מספקת שיטה עקרונית וגמישה ליצירת רומן, אבל אובייקטים נטורליסטי 3-D 14. בדומה לכך, הסמנכ"ל מספק שיטה עקרונית של יצירת קטגוריות נטורליסטי 9,10,12,13. ראוי לציין כי קטגוריות אובייקט שנוצרו על ידי תכונות רבות לשתף עם סמנכ"ל קטגוריות אובייקטים בטבע, כולל את העובדה שהקטגוריות נוטות להיות היררכי בטבע, ואת וריאציות התכונה בתוך ברחבי קטגוריות מתעוררות באופן עצמאי של הנסיין ואת האלגוריתמים לסיווג 39.
מגבלות נוכחיות וכיוונים עתידיים
שלוש מגבלות נוכחיות של הפרוטוקול שלנו ואת ההנחיות לעבודה בעתיד הם מציעותראוי לציון מיוחד: ראשית, שניהם VM וסמנכ"ל לדמות תהליכים ביולוגיים. בעוד אנו מראים כי חפצים וירטואליים שאינם ביולוגיים יכולים לשמש כמצעים לתהליכים אלו, התהליכים הבסיסיים עדיין מונעים מבחינה ביולוגית. עם זאת, אובייקטים טבעיים - ביולוגיים ושאינם ביולוגיים כאחד - לעבור שינויי צורה בשל כוחות שאינם ביולוגיים. למשל, סלעים עשויים להשתנות בצורה עקב תהליכים גיאולוגיים כגון שחיקה או שקיעה. קטגוריות חדשות של רוק עשויות לנבוע מתהליכים גיאולוגיים אחרים כאלה. זה צריך להיות פשוט יחסית כדי לשלב את התהליכים האלה ברפרטואר של אלגוריתמים לשנות את הצורה זמינות.
המגבלה העיקרית השנייה של הפרוטוקול שלנו היא שהרפרטואר הנוכחי של שינויי צורה דינמיות הוא מוגבל למדי. רצוי לשלב מגוון גדול יותר של שינויי צורה, כגון תנועה ביולוגית, או תנועה בשל כוחות חיצוניים, כגון רוח, מים או כוח הכביד. אנו מצפים שזה wilאני יהיה פשוט יחסית להביא לשאת את אלגוריתמי אנימצית המחשב הידוע ליישם שינויי צורה דינמיות כאלה.
המגבלה העיקרית השלישית של הפרוטוקול שלנו היא VM שכרגע אינו כולל תהליכים רבים אחרים ידועים המוךפו"גנטי כולל, בעיקר, gastrulation 36. זה גם לא מצליח לשלב כמה מגבלות ידועות, כגון עובדה שהמורפוגנזה בצמחים מתווכת כולו על ידי גידול, עם מעט או ללא תנועת תא אפשרית, בגלל קירות התא 36. בדומה לכך, הסמנכ"ל אינו כולל תהליכי פילוגנטי ידועים אחרים כגון סחיפה גנטית 40. בהתייחסו המגבלות האלה תהיינה מאוד לעזור להקל על השימוש בפרוטוקול שלנו בסימולציות התפתחותיים, אקולוגיות והאבולוציוני.
Disclosures
אין ניגודי האינטרסים הכריזו.
Acknowledgments
עבודה זו נתמכה בחלקו על ידי הצבא האמריקאי במעבדת המחקר ומחקר צבא משרד מענק W911NF1110105 ארה"ב והמענק NSF IOS-1147097to ג'יי Hegdé. תמיכה גם מסופקת על ידי מענק טייס לג'יי Hegdé מחזון מכון דיסקברי של ג'ורג'יה הבריאות באוניברסיטת המדעים. דניאל קרסטן נתמך על ידי מענקי ONR N00014-05-1-0124 וNIH R01 EY015261 ובחלקו על ידי תכנית WCU (World Class אוניברסיטה) ממומנת על ידי משרד חינוך, מדע והטכנולוגיה באמצעות קרן המחקר הלאומי של קוריאה (R31-10008 ). קארין Hauffen נתמך על ידי תכנית המחקר לתואר הראשונה חניכות (URAP) של צבא ארה"ב.
Materials
| Name | Company | Catalog Number | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. | |||
References
- Palmeri, T. J., Gauthier, I. Visual object understanding. Nat. Rev. Neurosci. 5, 291-303 (2004).
- Seger, C. A., Miller, E. K. Category learning in the brain. Annu. Rev. Neurosci. 33, 203-219 (2010).
- Perceptual Learning. Fahle, M., Poggio, T. , MIT Press. (2002).
- Ashby, F. G., Maddox, W. T. Human category learning. Annu. Rev. Psychol. 56, 149-178 (2005).
- Gauthier, I., Tarr, M. J. Becoming a "Greeble" expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Fragment-based learning of visual categories. Bart, E., Hegdé, J., Kersten, D. Cosyne 2008 Conference, 2008 Feb 28-Mar 2, Salt Lake City, , Cosyne. Salt Lake City. 121-12 (2008).
- Ball, P. Nature's patterns : a tapestry in three parts. , Oxford University Press. (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D. Bootstrapped learning of novel objects. J. Vis. 3, 413-422 (2003).
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M. Feature-based volume metamorphosis. SIGGRAPH. , 449-456 (1995).
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. Numerical geometry of non-rigid shapes. , Springer. (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. Pattern classification. , 2nd edn, Wiley. (2001).
- Bishop, C. M. Pattern recognition and machine learning. , Springer. (2006).
- Theodoridis, S., Koutroumbas, K. Pattern recognition. , 3rd edn, Academic Press. (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , 4th edn, W.H. Freeman and Co. (2011).
- Tuffery, S. Data mining and statistics for decision making. , Wiley. (2011).
- Crawley, M. J. Statistical Computing: An Introduction to Data Analysis using S-Plus. , Wiley. (2002).
- Venables, W. N., Ripley, B. D. Modern Applied Statistics with S. , Springer. (2003).
- Beier, T., Neely, S. Feature-based image metamorphosis. SIGGRAPH. 26, 35-42 (1992).
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. Warping and morphing of graphical objects. , Morgan Kaufmann Publishers. (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , IEEE Computer Society Press. (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. Computer graphics. , Nova Science Publishers. (2011).
- Lengyel, E. Mathematics for 3D game programming and computer graphics, third edition. , 3rd Ed, Cengage Learning. (2011).
- Gilbert, S. F. Developmental biology. , 9th edn, Sinauer Associates. (2010).
- Gilbert, S. F., Epel, D. Ecological developmental biology : integrating epigenetics, medicine, and evolution. , Sinauer Associates. (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E. Categorization of natural objects. Annual Review of Psychology. 32, 89-115 (1981).
- Futuyma, D. J. Evolution. , 2nd edn, Sinauer Associates. (2009).