Summary
Descriviamo una nuova metodologia per la creazione di naturalistici oggetti 3-D e categorie di oggetti con variazioni tecniche definite con certezza. Usiamo simulazioni dei processi biologici di morfogenesi e filogenesi di creare nuovi, naturalistici oggetti virtuali in 3-D e categorie di oggetti che possono poi essere resi come immagini visive o oggetti tattili.
Abstract
Al fine di studiare quantitativamente percezione dell'oggetto, sia la percezione di sistemi biologici o da macchine, si ha la necessità di creare oggetti e categorie oggetto con definibile con precisione, preferibilmente naturalistico, proprietà 1. Inoltre, per gli studi sull'apprendimento percettivo, è utile per creare oggetti nuovi e categorie di oggetti (o classi di oggetti) con tali proprietà 2.
Molti metodi innovativi e utili attualmente esistenti per la creazione di nuovi oggetti e categorie di oggetti 3-6 (vedi anche rif. 7,8). Tuttavia, in generale, i metodi esistenti hanno tre grandi tipi di carenze.
Primo, variazioni di forma sono generalmente imposto dallo sperimentatore 5,9,10, e può quindi essere diversa dalla variabilità categorie naturali, e ottimizzato per un particolare algoritmo di riconoscimento. Sarebbe desiderabile avere le variazioni sorgono indipendentemente EXTErnally imposto vincoli.
In secondo luogo, i metodi esistenti hanno difficoltà a catturare la complessità forma degli oggetti naturali 11-13. Se l'obiettivo è di studiare percezione naturale oggetto, è auspicabile che gli oggetti e le categorie oggetto da naturalistico, in modo da evitare possibili confonde e casi particolari.
Terzo, è generalmente difficile misurare quantitativamente le informazioni disponibili nei stimoli creati con metodi convenzionali. Sarebbe auspicabile creare oggetti e categorie oggetto quando le informazioni possono essere misurate con precisione e, se necessario, sistematicamente manipolato (o 'sintonizzato'). Questo permette di formulare le sottostanti compiti di riconoscimento degli oggetti in termini quantitativi.
Qui si descrive un insieme di algoritmi, o metodi, che soddisfano tutti e tre i criteri di cui sopra. Morfogenesi virtuale (VM) crea nuovi, naturalistici oggetti virtuali in 3-D chiamato 'embrioni digitali "dasimulando il processo biologico di embriogenesi 14. Filogenesi virtuale (VP) crea nuove categorie di oggetti naturalistici, simulando il processo evolutivo della selezione naturale 9,12,13. Gli oggetti e le categorie di oggetti creati da queste simulazioni possono essere ulteriormente manipolati da vari metodi di morphing per generare variazioni sistematiche delle caratteristiche di forma 15,16. Il VP e morphing metodi possono essere applicati, in linea di principio, a nuovi oggetti virtuali diversi embrioni digitali, o di versioni virtuali di oggetti del mondo reale 9,13. Oggetti virtuali creati in questo modo possono essere visualizzati come immagini visive utilizzando un toolkit grafico convenzionale, con manipolazioni desiderati di struttura della superficie, illuminazione, dimensioni, punto di vista e lo sfondo. Gli oggetti virtuali possono anche essere 'stampato' come oggetti tattili utilizzando un convenzionale 3-D prototyper.
Abbiamo anche descrivere alcune implementazioni di questi algoritmi computazionali per illuscentrare la potenziale utilità degli algoritmi. È importante distinguere gli algoritmi dalle rispettive implementazioni. Le implementazioni sono dimostrazioni offerti esclusivamente come una 'prova di principio' degli algoritmi sottostanti. È importante notare che, in generale, l'implementazione di un algoritmo di calcolo ha spesso limitazioni che l'algoritmo stesso non ha.
Insieme, questi metodi rappresentano una serie di strumenti potenti e flessibili per lo studio e il riconoscimento di oggetti di apprendimento percettivo dai sistemi biologici e computazionali simili. Con le estensioni del caso, questi metodi possono anche rivelarsi utili nello studio della morfogenesi e filogenesi.
Protocol
1. Creazione naturalistici virtuali 3D Objects utilizzando VM
- Per creare embrioni digitali, utilizzare il Workshop Digital Embryo (DEW, vedi tabella 1). Ogni esecuzione genera un singolo embrione 14, la cui forma è unica per un dato insieme di impostazioni (o 'genotipo') utilizzate per la conduzione data (Figura 1). Le "cellule dell'embrione sono rappresentati come triangoli 14.
- Eseguire il programma come numero di volte necessario per generare il numero desiderato di embrioni.
- Se forme più complesse sono desiderati, aumentare il numero di cicli di crescita, cioè il numero di volte che le cellule dell'embrione si dividono. Si noti che questo sarà anche rallentare il programma. Se è necessario creare oggetti virtuali diversi embrioni digitali, utilizzare commercialmente disponibili 3-D strumenti di modellazione o ottenere oggetti virtuali da fornitori commerciali (Tabella 1).
- È generalmente consigliabile salvare l'oggetto virtuales in un formato di file comunemente utilizzati, come OBJ, in modo che gli oggetti possano essere facilmente importato in un commerciale 3-D modeling toolkit. A tal fine, il DEW scrive oggetti in formato OBJ predefinita.
- Stimoli visivi possono essere generati usando uno o più embrioni digitali utilizzando una modellazione 3-D e ambiente di rendering (Tabella 1). Utilizzare standard di operazioni grafiche come ad esempio variando la, l'orientamento dimensioni, illuminazione, texture di superficie e di fondo per creare gli stimoli desiderati (vedere la Figura 2).
2. Creazione di categorie di oggetti naturalistici con VP
- Per generare categorie di oggetti, generare discendenti (o "bambini") del dato antenato (o 'madre') oggetto utilizzando una combinazione desiderata dei processi in fase 1.1 di cui sopra (Figura 3) 9,10,12,13.
- Alcuni dei metodi descritti di seguito per la creazione di variazioni di forma lisce come morphing o componenti principali (vedere i punti 3 e 4), lavoro better se tutti gli oggetti in ingresso hanno lo stesso numero di celle e se c'è una corrispondenza biunivoca tra i vertici degli oggetti. Per creare tali oggetti, utilizzare solo quei processi VM che non cambiano il numero di cellule e preservare l'uno-a-uno corrispondenza di vertici tra gli oggetti (vedi, ad esempio, generazioni G 2 a G 3 in figura 3). Per esempio, la divisione cellulare e morte cellulare programmata modificare il numero di cellule, e rendono molto più difficile (sebbene non impossibile 17,18) per determinare una corrispondenza biunivoca tra i vertici di una data coppia di oggetti.
Si noti che i processi che alterano il numero di cellule in un dato oggetto anche alterare la sua complessità forma. In generale, maggiore è il numero di cellule, maggiore è la complessità forma dell'oggetto e la sua superficie liscia. - Se necessario, gli oggetti virtuali diversi embrioni digitali possono essere utilizzati come input per VP (Figura 4).
- Alcuni dei metodi descritti di seguito per la creazione di variazioni di forma lisce come morphing o componenti principali (vedere i punti 3 e 4), lavoro better se tutti gli oggetti in ingresso hanno lo stesso numero di celle e se c'è una corrispondenza biunivoca tra i vertici degli oggetti. Per creare tali oggetti, utilizzare solo quei processi VM che non cambiano il numero di cellule e preservare l'uno-a-uno corrispondenza di vertici tra gli oggetti (vedi, ad esempio, generazioni G 2 a G 3 in figura 3). Per esempio, la divisione cellulare e morte cellulare programmata modificare il numero di cellule, e rendono molto più difficile (sebbene non impossibile 17,18) per determinare una corrispondenza biunivoca tra i vertici di una data coppia di oggetti.
- Gli oggetti all'interno di una data categoria può essere ulteriormente selezionati in modo da ottenere una data distribuzione di funzioni 19. Per esempio, si può eliminare selettivamente medie oggetti da una data categoria per generare una distribuzione bimodale delle dimensioni dell'oggetto.
- Non esiste un unico metodo che è universalmente ottimale per misurare le informazioni disponibili forma per tutte le categorie, né esiste un unico metodo che è ottimale per classificare tutti gli oggetti 20-22. Così, il sperimentatore deve scegliere questi metodi in base alle categorie e gli obiettivi a portata di mano di calcolo 20-22. Passo 4 descrive un metodo comunemente utilizzato per manipolare vari aspetti della forma informazioni disponibili.
- La somiglianza tra una data coppia di categorie può essere oggettivamente misurato con metodi filogenetici disponibili 23,24. Per esempio, la verticale (o 'evolutiva') distanza tra una data coppia di categorie, come misurato da cl gerarchicaustering metodi della statistica R toolkit, è una misura oggettiva di somiglianza categoria 25,26.
3. Ulteriori metodi di creazione di variazione di forma: Digital Morphing
- Dato qualsiasi coppia di oggetti in modo che ogni vertice di un oggetto corrisponde esattamente a un vertice dell'altro oggetto (. Cioè oggetti con uno-a-uno corrispondenza tra vertici), morphing è semplice 17,18,27-29: In questo caso, variazioni lisce (o 'morphs') tra i due oggetti sono prodotti da intoppi interpolazione tra i vertici corrispondenti e normali (Figura 5). A seconda della coppia di oggetti scelti, morphing si tradurrà in nuove categorie o bambini supplementari all'interno di una categoria.
- Gli oggetti mostrati in Figura 5 sono stati creati utilizzando lineare morphing 27-29. Gli oggetti possono essere trasformate (o deformato) di una vasta gamma di altre tecniche di deformazione disponibili 17,18.
- Per creare una distribuzione desiderata di forme morphed, scegliere i punti di appoggio di conseguenza.
4. Ulteriori metodi di creazione di variazione di forma: Componenti Principali
- Per poter utilizzare componenti principali per generare variazioni di forma, si ha la necessità di determinare prima i componenti principali 15. Componenti principali sono specifici per il dato insieme di oggetti utilizzati per determinare loro 26. Per ottenere buoni risultati, utilizzare almeno 30 oggetti con uno-a-uno corrispondenza tra vertici 26.
- Generare un oggetto media da un insieme desiderato di oggetti di input n, separatamente dalla media le coordinate e la normale di ciascun vertice in tutti gli oggetti. Così, la coordinata x di un dato vertice di k dovrebbe essere la media delle coordinate X di k vertici di tutti gli n oggetti, e così via.
- Utilizzare la funzione di Matlab princompper determinare i componenti principali degli n oggetti. Questo genererà n-1 non nulli autovettori, insieme con il corrispondente n-1 autovalori 26.
- Per generare un nuovo oggetto A j da un componente principale determinata P i, P i moltiplicare il corrispondente autovalore λ i e un desiderato peso w j e aggiungere all'oggetto media:
A j = w + j λ i P i - Ogni singolo w j genererà un oggetto unico. Variando fluidamente w, si possono creare variazioni di forma liscio lungo un determinato componente principale.
- Per creare variazioni di forma lungo una dimensione forma indipendente, ripetere il punto 4.4 Utilizzo di un altro componente principale.
- Per creare una distribuzione desiderata di forme lungo un determinato componente principale, utilizzare la distribuzione desiderata w. </ Li>
- Per creare una griglia multidimensionale di forme, utilizzare un insieme di pesi per ciascuna delle diverse componenti principali:

5. Creazione di versioni tattili di oggetti 3-D
- 'Stampa-out' oggetti 3-D con un 3-D prototyper (o 3-D 'stampante'). Se necessario, regolare le dimensioni dell'oggetto e liscia superficie di un oggetto prima della stampa.
6. Un'applicazione Exemplar: inferenza bayesiana di Categoria di immagini
- Un compito importante nel processo visivo è inferire la categoria alla quale un dato oggetto osservato appartiene. Sebbene l'esatto meccanismo di questa interferenza è sconosciuta, c'è sia prove computazionale e fisiologici 9,12,13,30-32 che implica l'utilizzo di informazioni sulle caratteristiche note dell'oggetto nell'immagine dato di dedurre la categoria dell'oggetto. Qui, ci illustrate come questo processo inferenziale può funzionare in un contesto bayesiano, e in che modo digitale, gli embrioni possono essere utili per la ricerca in questo settore.
- Per semplicità, supponiamo che il compito categorizzazione è binario e coinvolge K distintivo categoria dalla categoria L (Figura 3). Sia C la variabile categoria. Noi deduciamo che C = C = K o L a seconda che l'immagine osservata I appartiene alla categoria K o L. Un approccio tipico alla categorizzazione comporta:
- Calcolare la probabilità che la categoria K è dato le informazioni nell'immagine, denotato p (C = K | I);
- Calcolare la probabilità che la categoria L è dato le informazioni nell'immagine, denotato p (C = L | I), e
- Picking la categoria con la più alta probabilità.
- Successivamente, si assume per semplicitàche vi è esattamente una funzione F binario. Questa caratteristica può essere presente nell'immagine (denotata F = 1) o assente dall'immagine (denotata F = 0). In questo esempio si utilizza il 'informativa frammento' caratteristica visibile in figura 8. Frammenti informativi sono stati descritti da Ullman e colleghi 33. Nel caso di specie, si utilizzerà il modello immagine mostrato in Figura 8 come la funzione, e un valore di soglia di 0,69. Per determinare se questa funzione è presente in una data immagine (diciamo, l'immagine più a destra nella fila G3 in figura 3), si utilizzeranno le seguenti operazioni:
- Scorrere questo modello su tutte posizioni possibili in immagine e calcolare, in ogni posizione, il valore assoluto di normalizzato cross-correlazione tra il modello e il sottostante sub-immagini.
- Selezionare la posizione dell'immagine con il valore più alto (0,60 nel caso di specie).
- Se questo valore è superiore alla soglia, concludereche la funzione è presente, altrimenti concludere che è assente. Nel nostro caso, poiché la più elevata correlazione 0,60 è inferiore alla soglia di 0,69, concludiamo che la funzione è assente in questa immagine.
- Il razionale di utilizzo di tali caratteristiche, ed i meccanismi di selezione delle funzioni e la determinazione delle soglie vanno oltre lo scopo di questa relazione, ma sono descritte in dettaglio in refs. 33, 30.
- Nell'ambito della funzione basata inferenza, assumiamo che tutte le informazioni gli estratti osservatore della immagine è contenuta nel valore di questa caratteristica, i. e, che p (C | I). = p (C | F).
Pertanto, il compito diventa quello di determinare il valore di F nell'immagine data (presente o assente), calcolo p (C = K | F) e p (C = L | F) per quel valore di F, e selezionando la categoria la maggiore probabilità. - Nel quadro bayesiano,

Pertanto,
e

Notare che il denominatore nelle due equazioni è la stessa. Pertanto, per confrontare p (C = K | F) e p (C = L | F), non è necessario calcolare il denominatore, bensì è sufficiente per calcolare le quantitàp (C = K | F) α p (C = K) p (F | C = K)
e
p (C = L | F) α p (C = L) p (F | C = L)
These sono a volte chiamati "probabilità" non normalizzati. Il termine p (C) si chiama 'prima', e il termine p (F | C) si chiama 'rischio'.- Per semplicità, si assume un 'piatto' prima: p (C = K) = p (C = L) = 0.5.
- Il compito è ora quello di calcolare P (F | C), la probabilità di un valore determinato in funzione di un'immagine di una data categoria C.
- Useremo le sei immagini della categoria L (figura 3) come esempio per calcolare p (F = 1 | C = L), la probabilità che la funzionalità è presente in una immagine di L categoria.
- Per calcolare p (F = 1 | C = L), prima prendere tutte le immagini di addestramento che appartengono a L. Di nuovo, questi sono mostrati in Figura 3.
- Per ogni immagine, determinare se il valore è funzione 1 (presente) O 0 (assente), come descritto in (6.3.1) - (6.3.3). Nel nostro caso, per le sei immagini in figura 3, i valori sono: [0, 0, 1, 0, 1, 0].
- Calcolare la frazione di immagini in cui il valore è funzione 1. Nel nostro caso, è 2/6 = 0,33.
- Pertanto, p (F = 1 | C = L) = 0,33. Si noti che per ottenere stime accurate, si dovrebbe utilizzare almeno 30 immagini per classe.
- In modo simile, si può calcolare che p (F = 0 | C = L) = 0,67, p (F = 1 | C = K) = 0,83, p (F = 0 | C = K) = 0,17.
- Dati questi valori, inferenza può essere eseguita. Assumiamo che ci è dato una nuova immagine (Figura 9), e il compito di determinare l'etichetta categoria. Questo viene eseguito come segue:
- Abbiamo determinare se la funzione F è presente nell'immagine, come descritto in (6.3.1) - (6.3.3). Nel nostro caso, la featura è presente, per cui F = 1.
- Utilizzando le equazioni (1) e (2), ed i valori calcolati nella (6.7.5) - (6.7.6), si può calcolare che p (C = K | F = 1) = 0,42 e p (C = L | F = 1) = 0,17.
- Date queste informazioni, è razionale concludere che l'immagine è di categoria K, con fiducia relativamente basso.
- Potrebbe essere interessante e utile per testare un tale approccio in un sistema biologico (ad esempio, psicofisica). In questo caso, le previsioni comportamentali potrebbero essere realizzati e confrontati con i risultati computazionali quali quelli ottenuti in (6.8.2). Per fare previsioni accurate, una buona stima di p (F | C) sono necessari. Tali stime, tuttavia, può essere difficile da ottenere per oggetti familiari. Il motivo è che un soggetto stima di p (F | C) non è osservabile direttamente, ed è estremamente difficile calcolarlo poiché il soggettoPrecedente esposizione 's di immagini naturali è incontrollabile e sconosciuto. Al contrario, se gli embrioni digitali sono utilizzati per gli esperimenti, allora è possibile controllare con precisione quali embrioni e categorie embrioni il soggetto è esposto. Ciò rende facile calcolare le quantità di interesse da esattamente gli stessi dati è stato esposto al soggetto. Il fatto che l'aspetto embrioni è naturalistico è utile, dal momento che rende probabile che il soggetto sta usando la stessa strategia categorizzazione come categorie naturali.




Representative Results
VM può essere utilizzato per generare una fonte virtualmente illimitata di nuove forme 3-D. Alcuni embrioni esemplari digitali generati utilizzando l'algoritmo VM sono mostrati nel pannello inferiore della figura 1. Ciascuno di questi 16 embrioni sono stati generati utilizzando il programma 'growEmbryos.exe' negli strumenti embrioni digitali per Cygwin (vedi Tabella 1) per 40 crescita cicli. Tutti i parametri di altri fattori di crescita sono stati fissati internamente dal programma. La maggior parte di questi parametri sono costanti (cioè, da un embrione identico all'altro). Alcuni parametri come la posizione e la forza delle fonti morfogeno, erano parametri di improvvisi previsti internamente dal programma in modo indipendente per ogni esecuzione. Le variazioni di forma tra questi 16 embrioni derivano esclusivamente a seguito delle variazioni di tali parametri casuali.
Alcuni esempi di superficie texturing 34,35 utilizzano alcune strutture scelte arbitrariamente sono mostrati nella Figura 2A. Scene visive di uncomplessità rbitrary può essere creato utilizzando un comune 3-D modeling e ambiente di rendering, come mostrato nella figura 2B.
'Albero genealogico' Un rappresentante generato da VP utilizza embrioni digitale è mostrato in Figura 3. Alberi comparabili possono anche essere costruiti utilizzando oggetti diversi embrioni digitali, come mostrato in Figura 4. Si noti che in entrambi i casi, gli oggetti che condividono un antenato comune semplicemente costituiscono una categoria, anche se lo sperimentatore può anche scegliere di definire una categoria come qualsiasi altro insieme di oggetti. Vale la pena notare dalla figura 4 che la nostra implementazione corrente della VM e algoritmi VP tende a produrre relativamente lisce, superfici curve, al contrario di oggetti frastagliati o piatta. Vale anche la pena notare che questa è probabilmente la limitazione della nostra implementazione di questi algoritmi e non gli stessi algoritmi, in quanto i processi di biolological in grado di produrre obiettivits con superfici piane e profili frastagliati (ad es., rosa foglia).
Figure 5 e 6 illustrano i risultati tipici di due metodi che possono essere utilizzati in aggiunta o al posto di, VP per creare variazioni di principio in forma dell'oggetto e categorie di oggetti.
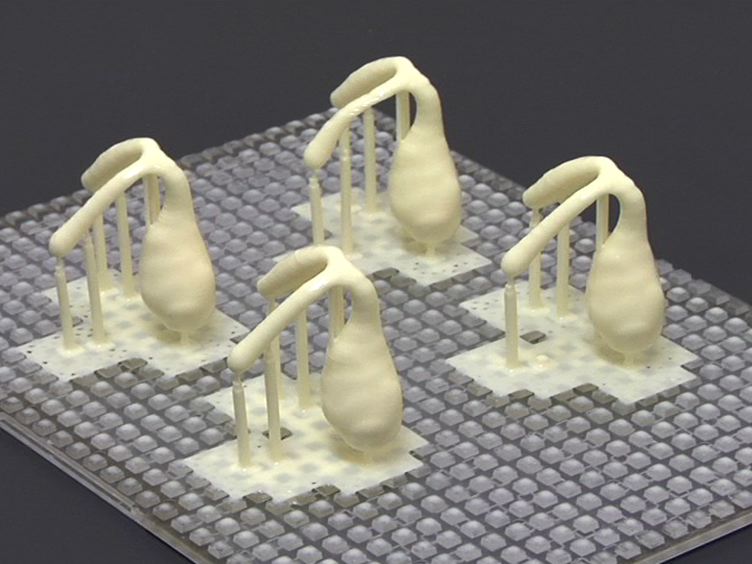
La parte superiore della figura 7 illustra rappresentazioni visive di due embrioni digitali, e il pannello inferiore della Figura 7 illustra le stampe corrispondenti generati da un comune 3-D prototyper.
Figure 8 e 9 illustrano le procedure descritte nella sezione 6 per utilizzare frammenti di immagini per classificare un determinato oggetto visivo.

Figura 1. Morfogenesi virtuale. 14. Embrioni digitali può essere generato simulando uno o più di alcuni processi chiave di embriogenesi biologica: morfogeno-mediata divisione cellulare, la crescita cellulare, il movimento cellulare e morte cellulare programmata 7,8,36,37. Ogni corsa inizia con un icosaedro (mostrato nel pannello superiore), e genera un embrione unico, a seconda delle impostazioni dei parametri VM (o 'genotipo') di detto embrione. Così, i 16 embrioni nel pannello di fondo, hanno forme diverse, perché tutti hanno differenti genotipi. Notare che semplici o più forme complesse possono essere generati come necessaria (ad esempio, per stimolare in modo ottimale i neuroni a un dato livello della gerarchia visiva) manipolando il genotipo dell'embrione. Tutti i processi di cui sopra eccetto embriogenetiche morte cellulare programmata state simulate nel generare gli embrioni mostrato. Simulata la morte cellulare programmata è particolarmenteutile per creare rientranze mirate (non mostrato).

Figura 2. Creazione di stimoli visivi che utilizzano embrioni digitali. Come ogni oggetto virtuale in 3-D, embrioni digitali possono essere graficamente manipolata per creare scene visive di complessità arbitraria utilizzando qualsiasi standard 3-D toolkit grafico. Questa figura illustra alcune manipolazioni comuni. (A) L'embrione stesso digitale è strutturato con molte strutture differenti, e illuminato da una fonte invisibile di luce in alto a sinistra. (B) Una scena camuffato viene creato il ridimensionamento e ri-orientare l'embrione digitale e digitalmente mettendo sullo stesso sfondo è stato strutturato con. L'embrione digitale può essere trovato in 'bella vista' nel quadrante in basso a destra. Per ulteriori esempi di stimoli visivi created utilizzando embrioni digitali, vedi rif. 9,10,12-14,38.

Figura 3. Creazione di categorie di embrioni digitali con VP. L'algoritmo emula VP evoluzione biologica, in quanto in entrambi i casi, gli oggetti nuovi e categorie di oggetti emergono come ereditarie variazioni si accumulano selettivamente. Ad ogni generazione, i G, embrioni selezionati procreare, che porta alla generazione di G i +1. La progenie ereditano le caratteristiche di forma del loro genitore, ma incamerati variazioni di forma dei loro propri (come determinato da piccole variazioni nel loro genotipo), come si sviluppano. Questa figura mostra un 'albero genealogico' di tre generazioni di discendenti a partire da un antenato comune, un icosaedro. Si noti che, in questo caso, aumenta la complessità della forma di icosaedro generatione G 1, ma non da G 1 in avanti. Questo perché aumento nel numero delle cellule (cioè., Divisione cellulare) è stato consentito dalla icosaedro alla generazione G 1, ma non da G 1 in avanti. In generale, la divisione cellulare tende ad aumentare la complessità forma, mentre altri processi morfogenetici come il movimento e la crescita cellulare forma cellulare cambiamento senza modificare la complessità della forma.

Figura 4. VP utilizzando oggetti virtuali diversi embrioni digitali. Seguente figura illustra il principio generale che oggetti virtuali diversi embrioni digitali possono essere utilizzati come input per VP. L'algoritmo VP nella sua forma attuale può funzionare su qualsiasi oggetto virtuale in 3-D la cui superficie è costituita esclusivamente da triangoli. Generazione G 1 comprised di (da sinistra a destra) una zucca, diamante, maschera, mela, rock e cactus. Si noti che gli oggetti in generazione G 1 in questa figura non hanno un antenato comune, perché il VP non lo richiede. Oggetti in G 2 e G 3 rappresentano i discendenti della roccia in G 1. Non sono divisioni cellulari sono stati autorizzati in ogni generazione, in modo che tutte le variazioni di forma derivano esclusivamente dal movimento e / o la crescita delle singole "celle" del dato oggetto.

Figura 5. Utilizzando morphing per creare variazioni lisce in forma. Morphing consiste nel prendere due oggetti dati (sinistra e destra embrione in questa figura) e calcolando gli oggetti intermedi (intervenendo embrioni) interpolando tra i vertici dei due corrispondenti designatod oggetti. Nel caso illustrato, tutti i vertici sono interpolati usando lo stesso fattore scalare, risultante in un morphing lineare. Tuttavia, è anche possibile morph gli oggetti non-lineare (non mostrato). Morphing è computazionalmente semplice quando vi è una precisa relazione uno-a-uno corrispondenza tra i vertici di due oggetti, come nel caso mostrato. Tuttavia è possibile, in linea di principio, a morph tra due oggetti dati virtuali, indipendentemente dal fatto che i vertici corrispondono esattamente, anche se non esiste un metodo unico di principio per farlo 17,18.

Figura 6. L'utilizzo di componenti principali per creare variazioni di forma liscia. (A) embrione media. Questo embrione rappresenta la media aritmetica di 400 embrioni (200 ciascuno da quello delle categorie K e L inFigura 3). Componenti principali sono stati calcolati come descritto al punto 4.3. Si noti che i componenti principali rappresentano reciprocamente indipendenti forma, dimensioni astratte dei 400 embrioni (non mostrato) 25,26. 400 embrioni produrre 399 componenti principali non nulli 25,26, che insieme rappresentano tutta la varianza, o informazioni di forma, disponibili collettivamente negli embrioni. Per convenzione, componenti principali sono disposti in ordine decrescente di loro autovalori, o la proporzione della varianza complessiva spiegano 25,26. In questo caso, le prime due componenti principali, rispettivamente il 73% e il 19% delle informazioni di forma disponibili nei 400 embrioni. (B) Gli embrioni che rappresentano diversi pesi (o più precisamente, autovalori ponderate) di Principal Component 1. Il peso varia da 2 (a sinistra) a -2 (a destra) in fasi uguali del -0,2. (C) Gli embrioni che rappresentano diversi pesi di Compon principaleent 2. I pesi inoltre varia da +2 (a sinistra) a -2 (a destra) in fasi uguali del -0.2. Si noti che la manipolazione principali componenti non esclusivamente manipolare qualunque parte del corpo specifica dell'embrione (ad es., Le ali dell'embrione nel caso illustrato). Tuttavia, se necessario, le parti del corpo di virtual oggetti 3-D può essere manipolato in qualsiasi modo arbitrario definito dall'utente utilizzando la maggior parte delle commercialmente disponibili ambienti 3-D di modellazione (non mostrato).

Figura 7. Creazione di oggetti aptici. Virtuale 3-D gli oggetti possono essere 'stampate' come oggetti tattili utilizzando uno standard, disponibile in commercio in 3-D 'stampante' o prototyper. Questa figura mostra embrioni digitali resi come oggetti visivi (riga in alto) o come gli oggetti tattili corrispondenti (riga in basso). Gli oggetti aptici shown in questa figura sono stati stampati in circa 6 cm di larghezza (scala bar = 1 cm), anche se gli oggetti possono essere stampati a dimensioni molto più piccole o più grandi.

Figura 8. Un modello per un frammento di esempio informativo. In questo esempio, il modello ha una soglia di 0,69 ad esso associati.

Figura 9. Una nuova immagine per il quale la categoria oggetto non è nota e deve essere determinata.
Discussion
Utilità di VM e VP in Cognitive Science Research
Abbiamo già descritto l'utilità di VM e VP in dettaglio l9 ,10,12-14. In breve, VM, in particolare la metodologia embrione digitale, è utile perché fornisce un metodo di principio e flessibile per la creazione di nuovi, ma naturalistiche oggetti 3-D 14. Allo stesso modo, VP fornisce un metodo di principio della creazione di categorie naturalistici 9,10,12,13. Vale la pena notare che le categorie di oggetti generate dalle funzionalità di parti VP con molte categorie di oggetti in natura, compreso il fatto che le categorie tendono ad essere di natura gerarchica, e le variazioni funzionalità all'interno e tra le categorie sorgere indipendentemente dello sperimentatore e gli algoritmi per la classificazione li 39.
Limiti attuali e le prospettive future
Tre attuali limiti del nostro protocollo e le indicazioni per il lavoro futuro suggerisconosono particolarmente significativi: in primo luogo, sia VM e VP simulare processi biologici. Mentre mostriamo che oggetti virtuali non biologici possono essere utilizzati come substrato per questi processi, i processi sottostanti sono ancora biologicamente motivati. Tuttavia, gli oggetti naturali - biologici e non biologici allo stesso modo - subiscono cambiamenti di forma a causa di non biologici forze. Per esempio, le rocce possono cambiare forma a causa di processi geologici come l'erosione o sedimentazione. Nuove categorie di roccia può derivare da altri tali processi geologici. Dovrebbe essere relativamente semplice per incorporare questi processi nel repertorio di algoritmi disponibili cambiare forma.
La seconda limitazione principale del nostro protocollo è che il suo repertorio attuale di cambiamenti di forma dinamica è piuttosto limitata. È opportuno inserire un array più grande di variazioni di forma, come il movimento biologico, o movimento causa di forze esterne come vento, acqua o gravità. Ci aspettiamo che la will essere relativamente semplice per far valere i noti algoritmi di computer animation per attuare tali cambiamenti di forma dinamica.
La terza limitazione principale del nostro protocollo è che VM attualmente non include molti altri processi morfogenetici noti tra cui, in particolare, gastrulazione 36. Inoltre non riesce a includere alcuni vincoli noti, come il fatto che la morfogenesi nelle piante è mediata interamente dalla crescita, con movimento cellulare poco o nessun possibile, a causa delle pareti cellulari 36. Allo stesso modo, VP non include altri processi filogenetici noti come la deriva genetica 40. Affrontare queste limitazioni sarebbe di grande aiuto facilitare l'uso del nostro protocollo in sviluppo, simulazioni ecologiche ed evolutive.
Disclosures
Nessun conflitto di interessi dichiarati.
Acknowledgments
Questo lavoro è stato in parte finanziato dal US Army Research Laboratory e l'US Army Research Office concessione W911NF1110105 e NSF concessione IOS-1147097to Jay Hegde. Il sostegno è stato fornito anche da una borsa di studio pilota per Jay Hegde dalla scoperta Vision Institute of Health Sciences dell'Università della Georgia. Daniel Kersten stato sostenuto dalle concessioni ONR N00014-05-1-0124 e NIH R01 EY015261 e in parte da WCU (World Class University) programma finanziato dal Ministero dell'Istruzione, della Scienza e della tecnologia attraverso la Fondazione Nazionale di Ricerca di Corea (R31-10008 ). Karin Hauffen è stato sostenuto dal Corso di Laurea apprendistato di ricerca (URAP) dell'esercito degli Stati Uniti.
Materials
| Name | Company | Catalog Number | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. | |||
References
- Palmeri, T. J., Gauthier, I. Visual object understanding. Nat. Rev. Neurosci. 5, 291-303 (2004).
- Seger, C. A., Miller, E. K. Category learning in the brain. Annu. Rev. Neurosci. 33, 203-219 (2010).
- Perceptual Learning. Fahle, M., Poggio, T. , MIT Press. (2002).
- Ashby, F. G., Maddox, W. T. Human category learning. Annu. Rev. Psychol. 56, 149-178 (2005).
- Gauthier, I., Tarr, M. J. Becoming a "Greeble" expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Fragment-based learning of visual categories. Bart, E., Hegdé, J., Kersten, D. Cosyne 2008 Conference, 2008 Feb 28-Mar 2, Salt Lake City, , Cosyne. Salt Lake City. 121-12 (2008).
- Ball, P. Nature's patterns : a tapestry in three parts. , Oxford University Press. (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D. Bootstrapped learning of novel objects. J. Vis. 3, 413-422 (2003).
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M. Feature-based volume metamorphosis. SIGGRAPH. , 449-456 (1995).
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. Numerical geometry of non-rigid shapes. , Springer. (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. Pattern classification. , 2nd edn, Wiley. (2001).
- Bishop, C. M. Pattern recognition and machine learning. , Springer. (2006).
- Theodoridis, S., Koutroumbas, K. Pattern recognition. , 3rd edn, Academic Press. (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , 4th edn, W.H. Freeman and Co. (2011).
- Tuffery, S. Data mining and statistics for decision making. , Wiley. (2011).
- Crawley, M. J. Statistical Computing: An Introduction to Data Analysis using S-Plus. , Wiley. (2002).
- Venables, W. N., Ripley, B. D. Modern Applied Statistics with S. , Springer. (2003).
- Beier, T., Neely, S. Feature-based image metamorphosis. SIGGRAPH. 26, 35-42 (1992).
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. Warping and morphing of graphical objects. , Morgan Kaufmann Publishers. (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , IEEE Computer Society Press. (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. Computer graphics. , Nova Science Publishers. (2011).
- Lengyel, E. Mathematics for 3D game programming and computer graphics, third edition. , 3rd Ed, Cengage Learning. (2011).
- Gilbert, S. F. Developmental biology. , 9th edn, Sinauer Associates. (2010).
- Gilbert, S. F., Epel, D. Ecological developmental biology : integrating epigenetics, medicine, and evolution. , Sinauer Associates. (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E. Categorization of natural objects. Annual Review of Psychology. 32, 89-115 (1981).
- Futuyma, D. J. Evolution. , 2nd edn, Sinauer Associates. (2009).