Summary
Мы описываем новую методологию для создания натуралистических 3-D объектов и объектов категории с точно определенными изменениями функции. Мы используем моделирования биологических процессов морфогенеза и филогенеза для создания новых, натуралистической виртуальные 3-D объектов и объектов категории, которая затем может быть вынесено как визуальные образы или тактильные объекты.
Protocol
1. Создание виртуальных Натуралистические 3-D объектов с помощью VM
- Для создания цифровой эмбрионы, используя цифровые семинар эмбрионов (DEW, см. таблицу 1). Каждый прогон генерирует один эмбрион 14, форма которых является уникальным для данного набора параметров (или «генотипа»), используемый для данного пробега (рис. 1). "Клетки" эмбриона представлены в виде треугольников 14.
- Запустите программу столько раз, сколько необходимо для получения нужного количества эмбрионов.
- Если более сложные формы желательно, увеличить число циклов роста, т. е. число раз клеток эмбриона будет делить. Обратите внимание, что это также будет замедлять программу. Если это необходимо для создания виртуальных объектов, кроме цифровых эмбрионов, использовать имеющиеся в продаже 3-D инструменты моделирования или получить виртуальные объекты от коммерческих поставщиков (табл. 1).
- Как правило, желательно, чтобы сохранить виртуальный объекта в часто используемых форматов файлов, таких как OBJ, чтобы объекты могут быть легко импортированы в коммерческом 3-D моделирования инструментарий. Для этого росы пишет объектов в OBJ формат по умолчанию.
- Визуальные стимулы могут быть созданы с помощью одного или нескольких цифровых эмбрионов с использованием 3-D моделирования и визуализации окружающей среды (табл. 1). Используйте стандартные графические операции, такие как изменения ориентации, размера, освещение, текстуру поверхности и фона для создания нужного раздражителей (см. Рисунок 2).
2. Создание натуралистические категории объекта с помощью В.П.
- Для создания объекта категории, создавать потомков (или «дети») данного предка (или "родитель") объекта, используя нужную комбинацию процессов в шаге 1.1, выше (рис. 3) 9,10,12,13.
- Некоторые методы, описанные ниже, для создания плавного изменения формы, такие, как морфинг или основных компонентов (см. шаги 3 и 4 ниже), работу Bettэ-э, если все объекты ввода имеют одинаковое число клеток, и если есть один-к-одному между вершинами объектов. Для создания таких объектов, использовать только те процессы, которые VM не изменится количество клеток и сохранит одно-однозначное соответствие вершин среди объектов (см., например, поколения G 2 до G 3 на рисунке 3). Например, деление клеток и запрограммированной смерти клетки изменяют количество клеток, и сделать это гораздо труднее (хотя и не невозможным 17,18), чтобы определить одно-однозначное соответствие между вершинами данной пары объектов.
Обратите внимание, что процессы, которые изменяют количество клеток в данном объекте также изменять его форму сложности. В общем, чем больше число клеток, тем больше форма сложности объекта и гладкой поверхности. - При необходимости виртуальные объекты, кроме цифровых эмбрионы могут быть использованы в качестве вклада в VP (рис. 4).
- Некоторые методы, описанные ниже, для создания плавного изменения формы, такие, как морфинг или основных компонентов (см. шаги 3 и 4 ниже), работу Bettэ-э, если все объекты ввода имеют одинаковое число клеток, и если есть один-к-одному между вершинами объектов. Для создания таких объектов, использовать только те процессы, которые VM не изменится количество клеток и сохранит одно-однозначное соответствие вершин среди объектов (см., например, поколения G 2 до G 3 на рисунке 3). Например, деление клеток и запрограммированной смерти клетки изменяют количество клеток, и сделать это гораздо труднее (хотя и не невозможным 17,18), чтобы определить одно-однозначное соответствие между вершинами данной пары объектов.
- Объектов в данной категории могут быть дополнительно выбирают так, чтобы достичь заданного распределения функций 19. Например, можно выборочно устранить средних объектов данной категории в целях получения бимодального распределения размера объекта.
- Существует не один способ, который универсально оптимальных для измерения имеющейся информации, формы для всех категорий, не существует единого метода, что является оптимальным для классификации всех объектов 20-22. Таким образом, экспериментатор должен выбрать эти методы, основанные на категории и вычислительных задач на руку 20-22. Шаг 4 описывает широко используемый метод для манипулирования различными аспектами имеющейся информации форме.
- Сходство между данной парой категорий может быть объективно измерена с помощью доступных методов филогенетического 23,24. Например, вертикальный (или «эволюционный») расстояние между данной парой категорий, измеряемый иерархических CLustering методов в R статистического инструментария, является объективной мерой категории сходства 25,26.
3. Дополнительные методы создания формы Вариация: Digital Morphing
- Для любой пары объектов, так что каждая вершина одного объекта соответствует ровно одна вершина другого объекта (. Т. е. объектов с взаимно-однозначное соответствие между вершинами), морфинг проста 17,18,27-29: В этом случае, плавные изменения (или «морф») между двумя объектами производится плавно интерполяции между соответствующими вершинами и нормалей (рис. 5). В зависимости от пары объектов выбраны, морфинг приведет к новой категории или дополнительных детям в данную категорию.
- Объекты показано на рисунке 5 были созданы с помощью линейного морфинга 27-29. Объектов может быть преобразован (или деформированные) на широкий спектр других доступных методов деформации 17,18.
- Для создания желаемого распределения синтезированные формы, выберите интерполяции соответственно.
4. Дополнительные методы создания формы Вариант: Основные компоненты
- Для того чтобы использовать основные компоненты для создания формы вариаций, необходимо в первую очередь определить основные компоненты 15. Основными компонентами являются специфическими для данного набора объектов, используемых для определения их 26. Для хороших результатов, используйте не менее 30 объектов с взаимно-однозначное соответствие между вершинами 26.
- Создание среднем объекта от нужного набора объектов п вход, по отдельности усреднения координат и нормальных каждой вершины по всем объектам. Таким образом, координаты х из данной вершины К должна быть средняя х координаты вершины А всех объектов п, и так далее.
- Используйте функцию Matlab princompопределить основные компоненты п объектов. Это создаст п-1 ненулевых векторов, вместе с соответствующим N-1 собственные значения 26.
- Для создания нового объекта J от данного основного компонента P я, умножить P Я на соответствующее собственное значение λ я и желаемый вес W J и добавьте в среднем объекта:
J = W + J λ я P я - Каждый уникальный W J генерирует уникальный объект. По плавно меняющейся W, можно создавать плавные изменения формы вдоль данного основного компонента.
- Чтобы создать форму вариациях вдоль независимые измерения формы, повторите шаг 4.4 Использование различных компонентов основной.
- Для создания желаемой формы распределения по данной основной компонент, используйте желаемого распределения ш. </ Li>
- Для создания многомерной сетке формы, использовать набор весов для каждого из нескольких основные компоненты:

5. Создание Haptic версии 3-D объектов
- 3-D 'Print-аут »объектов с использованием 3-D прототипов (или 3-D' принтер '). Если необходимо, отрегулируйте размер объекта и гладкой поверхности объекта перед печатью.
6. Exemplar Применение: байесовского вывода изображения категории
- Важной задачей в визуальной обработке выведения категории, к которой данное наблюдаемый объект принадлежит. Хотя точный механизм этого вывода неизвестно, есть и вычислительные и физиологических доказательств 9,12,13,30-32, что это связано с использованием информации об известных особенностей объекта в данном изображении, чтобы вывести категорию объекта. Здесь мы будем IllustraТе, как этот процесс умозаключения могут работать в рамках байесовского, и как цифровой эмбрионы могут быть полезны для исследований в этой области.
- Для простоты будем считать, что классификация задач является двоичным и включает в себя отличительные К категории из категории L (рис. 3). Пусть С категория переменная. Мы заключаем, что C = K или C = L в зависимости от того наблюдаемое изображение Я относится к категории K и L. Типичный подход к классификации включает в себя:
- Расчет вероятности того, что категория К данной информации в изображении, обозначается р (C = K | I);
- Расчет вероятности того, что категории L с учетом информации, содержащейся в изображении, обозначается р (C = L | I) и
- Выбор категории с большей вероятностью.
- Далее мы будем считать для простоты,что есть только один двоичный функция F. Эта функция может быть либо присутствует в изображении (обозначается F = 1) или отсутствует изображение (обозначается F = 0). Этот пример будет использовать 'информативные фрагмент "функция показана на рисунке 8. Информационные фрагменты были впервые описаны Ульман и его коллеги 33. В данном случае, мы будем использовать изображение шаблона показано на рисунке 8, как функция, и пороговое значение 0,69. Для определения того, эта функция присутствует в данное изображение (скажем, правый изображений в строке G3 на рисунке 3), мы будем использовать следующие шаги:
- Вставьте этот шаблон на все возможные места в изображении и вычислить, в каждом месте, абсолютное значение нормированной кросс-корреляции между шаблоном и основных суб-изображения.
- Выберите изображение расположения с наибольшим значением (0,60 в данном случае).
- Если это значение выше порога, заключатьчто функция присутствует, иначе вывод, что она отсутствует. В нашем случае, так как высокая корреляция 0,60 ниже порога 0,69, мы заключаем, что функция отсутствует в этом образе.
- Обоснование использования таких возможностей, и механизмов выбора функций и определение их пороговых значений выходит за рамки настоящего доклада, но подробно описаны в работах. 33, 30.
- В рамках функций на основе выводов, мы предполагаем, что вся информация, наблюдатель выдержки из изображения, содержащиеся в значении этой функции я. е, что р (C | I). = P (C | F).
Таким образом, задача становится, что из определения величины F в данной изображения (присутствует или отсутствует), вычислительных р (C = K | F) и р (C = L | F) для этого значения F, и выбрав категорию с выше вероятностныеlity. - В рамках байесовского,

Таким образом,
и

Отметим, что знаменатель в двух уравнений то же самое. Поэтому, чтобы сравнить р (C = K | F) и р (C = L | F), это не необходимо вычислить знаменатель, а, скорее, достаточно вычислить величиныр (C = K | F) α р (C = K) P (F | C = K)
и
р (C = L | F) α р (C = L) р (F | C = L)
ThВосточный иногда называют «ненормированной вероятностей. Термин р (С) называется «до», а термин р (F | C) называется «вероятность».- Для простоты будем считать, 'плоский' до: р (C = K) = P (C = L) = 0,5.
- Задача теперь для вычисления р (F | C), вероятность данного значения признака в образе данной категории C.
- Мы будем использовать шесть изображений категории L (рис. 3) в качестве примера для вычисления р (F = 1 | C = L), вероятность того, что функция присутствует в образе категории L.
- Для вычисления р (F = 1 | C = L), сначала взять все учебные изображений, которые принадлежат L. Опять же, это показано на рисунке 3.
- Для каждого изображения, определить, является ли функция значения 1 (настоящее) Или 0 (нет), как описано в (6.3.1) - (6.3.3). В нашем случае, за шесть изображений на рисунке 3, значения: [0, 0, 1, 0, 1, 0].
- Вычислить долю образы, в которых функция имеет значение 1. В нашем случае, это 2/6 = 0,33.
- Следовательно, р (F = 1 | C = L) = 0,33. Обратите внимание, что для получения точной оценки следует использовать по крайней мере 30 изображений в классе.
- Таким же образом, мы можем вычислить, что р (F = 0 | C = L) = 0,67, P (F = 1 | C = K) = 0,83, P (F = 0 | C = K) = 0,17.
- С учетом этих значений, вывод может быть выполнена. Предположим, что дано новое изображение (рисунок 9), и задача состоит в том, чтобы определить его категорию этикетке. Это осуществляется следующим образом:
- Мы определить, является ли функция F присутствует в изображении, как описано в (6.3.1) - (6.3.3). В нашем случае, ВЭДтуры присутствует, так что F = 1.
- С помощью уравнений (1) и (2), и значения, вычисленные в (6.7.5) - (6.7.6), мы можем вычислить, что р (C = K | F = 1) = 0,42 и р (C = L | F = 1) = 0,17.
- Учитывая эту информацию, это рационально сделать вывод, что изображение из категории K, с относительно низкой уверенности в себе.
- Это может быть интересно и полезно для проверки такого подхода в биологических системах (например, psychophysically). В этом случае, поведенческие прогнозы могут быть сделаны и сравнивают с вычислительной результатов, таких как, полученным в (6.8.2). Чтобы сделать точные прогнозы, хорошие оценки р (F | C) являются необходимыми. Такие оценки, однако, может быть трудно получить для знакомых объектов. Причина в том, что субъектом оценки р (F | C) не наблюдается непосредственно, и это очень трудно вычислить его с предметомПеред экспозиции "с до естественного изображения не поддается контролю и неизвестного. Напротив, если цифровая эмбрионы используются для экспериментов, то можно точно контролировать которая эмбрионов и эмбрионов категории субъекта подвергается. Это делает его легко вычислить количество интереса со стороны точно так же данные предмет подвергался. Тот факт, что внешний вид эмбрионов натуралистический является полезным, поскольку оно делает вероятным, что субъект использует ту же стратегию, как с классификацией природных категорий.




Representative Results
VM может быть использован для создания практически безграничные поставки новых 3-D формы. Некоторые примером цифрового эмбрионов создан с помощью VM алгоритма показано в нижней части рис 1. Каждая из этих 16 эмбрионов были созданы с помощью программы «growEmbryos.exe 'в цифровой инструмент эмбрионов для Cygwin (см. Таблицу 1) в течение 40 рост циклы. Все остальные параметры роста были установлены внутри программы. Большинство из этих параметров были постоянными (то есть, идентичный от одного зародыша к другому). Через несколько параметров, таких как расположение и силу морфогена источников, были случайными параметрами, установленными внутри программы отдельно для каждого запуска. Форма вариаций среди этих 16 эмбрионов возник исключительно в результате изменений в этих случайных параметров.
Некоторые примеры текстурирования поверхности 34,35 использованием некоторой произвольно выбранной текстуры показано на рисунке 2А. Визуальный сценыrbitrary сложности могут быть созданы с помощью имеющихся в продаже 3-D моделирования и визуализации окружающей среды, как показано на рисунке 2B.
Представитель "генеалогическое дерево ', порожденная В.П. использованием цифровых эмбрионов показан на рисунке 3. Сопоставимые деревьев также может быть построена с использованием объектов, кроме цифровых эмбрионов, как показано на рисунке 4. Обратите внимание, что в любом случае, объекты, которые разделяют общего предка прямо представляют собой категорию, хотя экспериментатор может также выбрать, чтобы определить категорию как и любой другой набор объектов. Стоит отметить, на рисунке 4, что наша текущая реализация В. М. и В. П. алгоритмов имеет тенденцию производить относительно гладкой, изогнутой поверхности, в отличие от зазубренные или плоских предметов. Стоит также отметить, что это предположительно ограничение нашей реализации этих алгоритмов, а не алгоритмы себя, так как biolological процессов может привести к объективнойTS с плоскими поверхностями и неровными контурами (например,., розовый лист).
На рисунках 5 и 6 показаны типичные результаты двух методов, которые могут быть использованы в дополнение к или вместо вице-президента по созданию принципиального изменения формы объектов и объектов категории.
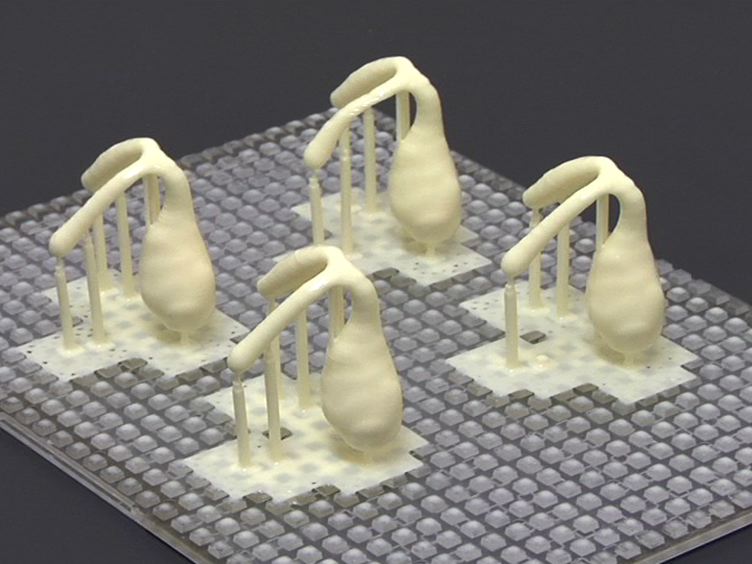
На верхней панели Рисунок 7 иллюстрирует визуальные визуализации двух цифровых эмбрионы, а в нижней панели Рисунок 7 иллюстрирует соответствующие распечатки порожденных имеющихся в продаже 3-D прототипов.
На рисунках 8 и 9 иллюстрируют процедуры, описанные в разделе 6 для использования фрагментов изображения по категориям данного визуального объекта.

Рисунок 1. Виртуальный морфогенеза. 14. Цифровой эмбрионы могут быть получены путем имитации одного или нескольких из некоторых ключевых процессов биологического эмбриогенеза: морфогена-опосредованной деление клеток, рост клеток, движение и запрограммированной смерти клетки 7,8,36,37. Каждый запуск начинается с икосаэдр (показан в верхней панели), и генерирует уникальный эмбриона, в зависимости от настройки параметра VM (или «генотипа») этого эмбриона. Таким образом, 16 эмбрионов в нижней панели имеют различные формы, поскольку все они имеют разные генотипы. Обратите внимание, что простые или более сложные формы могут быть получены при необходимости (например, для оптимальной стимуляции нейронов на заданном уровне визуальной иерархии) с помощью манипулирования генотипом эмбриона. Все вышеупомянутые процессы эмбриогенетический кроме запрограммированной смерти клетки были смоделированы в создании эмбриона показано на рисунке. Имитация запрограммированной смерти клетки особеннополезно для создания целевых углублений (не показано).

Рисунок 2. Создание визуальных стимулов с использованием цифровых эмбрионов. Как и любой виртуальный объект 3-D, цифровой эмбрионы могут быть графически манипулировать для создания визуальных сцен произвольной сложности, используя любой стандартный 3-D графический инструментарий. Этот рисунок иллюстрирует некоторые распространенные манипуляции. (A) же цифровой эмбрион текстурированной с использованием различных текстур, и зажег от невидимого источника света в верхнем левом углу. (B) замаскированы сцене создается путем изменения размера и переориентации цифровой эмбриона и цифровой поместить его на том же фоне он был текстурированные с. Цифровые эмбриона можно найти в "видном" в правом нижнем квадранте. Дополнительные примеры зрительных стимулов CREated с использованием цифровых эмбрионов, см. библиогр. 9,10,12-14,38.

Рисунок 3. Создание цифровых категорий эмбриона использования VP. Алгоритм VP эмулирует биологической эволюции, в том, что в обоих случаях, новые объекты и категории выступают как наследственная изменчивость избирательно накапливаются. В каждом поколении G я, выбранные эмбрионах размножаются, что приводит к поколению G +1. Потомство наследует форму характеристики их родителей, но добавляется форме вариаций собственной (как определено небольшие вариации в их генотипа), как они развиваются. На этом рисунке показана «родословная» трех поколений потомков, начиная от одного общего предка, икосаэдр. Отметим, что в этом случае увеличивается формы сложности от икосаэдра к порождающимионный G 1, но не от G 1 и далее. Это потому, что увеличение числа клеток (то есть., Деление клеток) была разрешена с икосаэдра в поколение G 1, но не от G 1 и далее. В общем, деление клеток приводит к увеличению сложности формы, в то время как другие процессы, такие как морфогенетические движения клеток и их росту изменение формы без изменения общей сложности формы.

Рисунок 4. В.П. использованием виртуальных объектов, кроме цифровых эмбрионов. Эта цифра помогает проиллюстрировать общий принцип, что виртуальные объекты, кроме цифровых эмбрионы могут быть использованы в качестве вклада в VP. В. П. алгоритм в его нынешнем виде может работать на любой виртуальной 3-D объект, поверхность которого состоит исключительно из треугольников. Поколение G 1 состаЭД (слева направо) тыквы, бриллиант, маска, яблоко, рок и кактус. Обратите внимание, что объекты в поколение G 1 на этом рисунке не имеют общего предка, потому что вице-президент этого не требует. Объекты в G 2 и G 3 представляют собой потомков скале в G 1. Нет деления клеток были разрешены в любом поколении, так что все формы изменений возникла исключительно от движения и / или рост отдельных «ячеек» данного объекта.

Рисунок 5. Использование морфинга для создания плавного изменения формы. Morphing включает в себя прием двух заданных объектов (крайний слева и правого эмбриона на этом рисунке) и вычисления промежуточных объектов (промежуточные эмбрионов) путем интерполяции между соответствующими вершинами из двух назначаютD объектов. В случае показано, все вершины были интерполированы с использованием того же скалярного множителя, в результате линейного морфинга. Однако, это также можно трансформировать объекты нелинейно (не показано). Морфинг вычислительно простой, когда имеется точная один-к-однозначное соответствие между вершинами двух объектов, как и в случае показано на рисунке. Однако это возможно, в принципе, морфинг между любыми двумя виртуальными объектами независимо от того, являются ли их вершины соответствуют точно, хотя нет никакой принципиальной уникальный метод для этого 17,18.

Рисунок 6. Используя основные компоненты для создания плавного изменения формы. (A) Средняя эмбриона. Этот эмбрион представляет среднее арифметическое из 400 эмбрионов (200 каждую из категорий, K и L вРис. 3). Основные компоненты были рассчитаны как описано в шаге 4.3. Обратите внимание, что основные компоненты представляют собой независимые друг от друга, абстрактные формы размерами 400 эмбрионов (не показано) 25,26. 400 эмбрионов дают 399 ненулевых главных компонентов 25,26, на долю которых приходится все дисперсия, или форма информации, доступной в совокупности, в эмбрионы. По соглашению, основные компоненты расположены в порядке убывания их собственные, или доли общей дисперсии они объясняют 25,26. В этом случае, первые две главные компоненты соответственно составили 73% и 19% от формы информации, имеющейся в 400 эмбрионов. (B) Эмбрионы, которые представляют различные веса (или, точнее, взвешенных собственных значений) основного компонента 1. Весов колебалась от +2 (крайний слева) до -2 (крайний справа) в равных шагов -0,2. (C) Эмбрионы, которые представляют различные веса основных COMPONЛОР-2. Веса также варьировались от +2 (крайний слева) до -2 (крайний справа) в равных шагов -0,2. Обратите внимание, что манипулирование основными компонентами не только манипулировать любой конкретной части тела эмбриона (например,., Крылья эмбриона в случае показано). Тем не менее, в случае необходимости, частей тела виртуальных 3-D объектов можно манипулировать в произвольной пользовательской моды с использованием самых коммерчески доступных 3-D моделирования сред (не показано).

Рисунок 7. Создание тактильные объекты. Виртуальных 3-D объекты могут быть «печатный», как тактильные объекты с использованием стандартных, имеющихся в продаже 3-D "принтер" или прототипов. Эта цифра показывает, цифровой эмбрионов отображаются как визуальные объекты (верхний ряд), либо как соответствующие объекты тактильные (нижний ряд). Тактильные объекты сhown в эту цифру были напечатаны составит около 6 см (масштаб 1 см), хотя объекты могут быть напечатаны в гораздо меньших или больших размеров.

Рисунок 8. Шаблон для примера информативные фрагмента. В этом примере шаблон имеет порог 0,69 связанные с ним.

Рисунок 9. Новое изображение, для которого объект категории не известны и должны быть определены.
Discussion
Полезность В. М. и В. П. в когнитивной науке исследований
Ранее мы уже описали полезности В. М. и В. П. подробно L9 ,10,12-14. Короче говоря, В.М., особенно цифровой методологии эмбриона, является полезной, поскольку она обеспечивает принципиальную и гибкий способ создания романа, но натуралистическая 3-D объектов 14. Кроме того, В. П. обеспечивает принципиальную метод создания натуралистических категорий 9,10,12,13. Стоит отметить, что объект категорий, порожденных В. П. разделяют многие черты с объектом категорий в природе, в том числе тот факт, что категории, как правило, иерархический характер, и функция изменения внутри и между категориями возникают независимо от экспериментатора и алгоритмы для классификации их 39.
Текущие ограничения и будущие направления
Три существующие ограничения нашего протокола и направления будущей работы, которую они предлагаютследует особо отметить: Во-первых, как В. М. и В. П. моделирования биологических процессов. В то время как мы покажем, что небиологических виртуальные объекты могут быть использованы в качестве субстратов для этих процессов, основные процессы по-прежнему биологически мотивированной. Тем не менее, природных объектов - биологических и небиологических так - пройти изменения формы из-за не-биологических сил. Например, горные породы может измениться в форму за счет геологических процессов, таких как эрозия или седиментации. Новые категории породы могут возникнуть от других подобных геологических процессов. Он должен быть относительно простым, чтобы включить эти процессы в репертуар доступных алгоритмах изменение формы.
Второе серьезное ограничение нашего протокола является то, что текущий репертуар динамического изменения формы весьма ограничен. Желательно включать более широкий круг изменения формы, такие как биологические движения, движения за счет внешних сил, таких, как энергия ветра, воды или тяжести. Мы ожидаем, что она Вильл быть относительно простым, чтобы пустить в ход известные алгоритмы компьютерной анимации для реализации таких динамических изменений формы.
Третьим основным ограничением нашего протокола является то, что VM в настоящее время не включают в себя много других известных морфогенетических процессов, включая, прежде всего, гаструляции 36. Он также не включает некоторые известные ограничения, например, тот факт, что в морфогенезе растений опосредована исключительно за счет роста, с небольшим или без клеточного движения возможны, потому клеточных стенок 36. Кроме того, вице-президент не включает другие известные процессы филогенетического таких как генетический дрейф 40. Решение этих ограничений позволит значительно облегчить использование нашего протокола в области развития, экологического и эволюционного моделирования.
Disclosures
Нет конфликта интересов объявлены.
Acknowledgments
Эта работа была частично поддержана армией США и Научно-исследовательской лаборатории армии США Research Office грант W911NF1110105 и NSF гранта IOS-1147097to Jay Hegde. Была также оказана поддержка пилотом грант Jay Hegde от видения Discovery института Джорджии университета медицинских наук. Даниэль Керстен была поддержана грантами ONR N00014-05-1-0124 и NIH R01 EY015261 и частично WCU (World Class Университет) программы, финансируемой Министерством образования, науки и технологий через Национальный научный фонд Корея (R31-10008 ). Карин Hauffen была поддержана программа студенческого профессиональное исследований (URAP) армии США.
Materials
| Name | Company | Catalog Number | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. | |||
References
- Palmeri, T. J., Gauthier, I. Visual object understanding. Nat. Rev. Neurosci. 5, 291-303 (2004).
- Seger, C. A., Miller, E. K. Category learning in the brain. Annu. Rev. Neurosci. 33, 203-219 (2010).
- Perceptual Learning. Fahle, M., Poggio, T. , MIT Press. (2002).
- Ashby, F. G., Maddox, W. T. Human category learning. Annu. Rev. Psychol. 56, 149-178 (2005).
- Gauthier, I., Tarr, M. J. Becoming a "Greeble" expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Fragment-based learning of visual categories. Bart, E., Hegdé, J., Kersten, D. Cosyne 2008 Conference, 2008 Feb 28-Mar 2, Salt Lake City, , Cosyne. Salt Lake City. 121-12 (2008).
- Ball, P. Nature's patterns : a tapestry in three parts. , Oxford University Press. (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D. Bootstrapped learning of novel objects. J. Vis. 3, 413-422 (2003).
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M. Feature-based volume metamorphosis. SIGGRAPH. , 449-456 (1995).
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. Numerical geometry of non-rigid shapes. , Springer. (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. Pattern classification. , 2nd edn, Wiley. (2001).
- Bishop, C. M. Pattern recognition and machine learning. , Springer. (2006).
- Theodoridis, S., Koutroumbas, K. Pattern recognition. , 3rd edn, Academic Press. (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , 4th edn, W.H. Freeman and Co. (2011).
- Tuffery, S. Data mining and statistics for decision making. , Wiley. (2011).
- Crawley, M. J. Statistical Computing: An Introduction to Data Analysis using S-Plus. , Wiley. (2002).
- Venables, W. N., Ripley, B. D. Modern Applied Statistics with S. , Springer. (2003).
- Beier, T., Neely, S. Feature-based image metamorphosis. SIGGRAPH. 26, 35-42 (1992).
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. Warping and morphing of graphical objects. , Morgan Kaufmann Publishers. (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , IEEE Computer Society Press. (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. Computer graphics. , Nova Science Publishers. (2011).
- Lengyel, E. Mathematics for 3D game programming and computer graphics, third edition. , 3rd Ed, Cengage Learning. (2011).
- Gilbert, S. F. Developmental biology. , 9th edn, Sinauer Associates. (2010).
- Gilbert, S. F., Epel, D. Ecological developmental biology : integrating epigenetics, medicine, and evolution. , Sinauer Associates. (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E. Categorization of natural objects. Annual Review of Psychology. 32, 89-115 (1981).
- Futuyma, D. J. Evolution. , 2nd edn, Sinauer Associates. (2009).