Summary
我々は正確に定義された機能の変動に自然主義的な3-Dオブジェクトとオブジェクトカテゴリを作成するための新しい方法論を記述する。次に、視覚画像や触覚オブジェクトとしてレンダリングできます小説、自然主義的な仮想3-Dオブジェクトとオブジェクトカテゴリを作成する形態形成と系統発生の生物学的プロセスのシミュレーションを使用しています。
Abstract
定量対象知覚を研究するために、生物学的システムによって、またはマシン、特性1、好ましくは自然主義的な、正確に定義可能で、オブジェクトとオブジェクトカテゴリを作成する1つのニーズによって、それが知覚される。さらに、知覚学習に関する研究のために、それはそのような特性を有する新規2オブジェクトとオブジェクトカテゴリ(またはオブジェクトクラス ) を作成するのに便利です。
多くの革新的で有用な方法は、現在、新規のオブジェクトとオブジェクトカテゴリ3-6(またrefsを参照してください。7,8)を作成するために存在しています。しかし、一般的に言えば、既存の方法は欠点の3つの広範な種類を持っている。
まず、形状の変化は、一般的に実験5,9,10により課されているので、自然カテゴリの変動とは異なる場合があり、特定の認識アルゴリズムのために最適化されています。それはバリエーションがエクステとは独立に発生することが望ましいであろうrnally制約を課した。
第二に、既存の方法では、11月13日自然物の形状の複雑さを捉えることが困難である。目標は、自然物の知覚を研究することである場合、オブジェクトとオブジェクトカテゴリが可能交絡や特殊なケースを避けるために、自然主義的であるためには、それが望ましい。
第三に、それは定量的に従来の方法で作成された刺激で入手可能な情報を測定することは一般に困難である。それは体系的に(または "調整")操作、必要な場合には、利用可能な情報を正確に測定することができるオブジェクトとオブジェクトのカテゴリを作成し、することが望ましいであろう。これは、1つは、量的には、基礎となるオブジェクト認識タスクを策定することができます。
ここでは、上記の基準の3つすべてを満たすアルゴリズム、またはメソッドのセットを記述します。仮想形態形成(VM)はによって "デジタル胚"と呼ばれる小説、自然主義的な仮想3次元オブジェクトを作成する胚発生14の生物学的プロセスをシミュレートする。仮想系統発生(VP)は自然淘汰9,12,13の進化の過程をシミュレートすることによって、小説、自然主義的なオブジェクトのカテゴリを作成します。これらのシミュレーションによって作成されたオブジェクトとオブジェクトカテゴリは、さらに形状特性15,16の系統的なバリエーションを生成するために様々なモーフィングの方法で操作することができます。 VPとモーフィングの方法もまた、デジタル胚以外の小説の仮想オブジェクトに、または実世界のオブジェクト9,13の仮想バージョンには、原則として適用することができます。この方法で作成された仮想物体は、表面の質感、照明、サイズ、視点と背景の所望の操作で、従来のグラフィカルツールキットを使用して視覚的なイメージとしてレンダリングできます。仮想オブジェクトはまた、従来の3次元プロトを使って触覚オブジェクトとして "印刷"することができます。
我々はまた、illusを助けるために、これらの計算アルゴリズムのいくつかの実装を記述するアルゴリズムの潜在的有用性をtrate。それらの実装のアルゴリズムを区別することが重要である。実装は、単に基本的なアルゴリズムの "原理の証明"として提供されるデモです。一般的には、計算アルゴリズムの実装がしばしばアルゴリズム自体が持っていない制限がありますことに注意するのは重要です。
一緒に、これらの方法は同様の生物学的および計算システムによる物体認識と知覚学習を研究するための強力かつ柔軟なツールのセットを表します。適切な拡張子を使用すると、これらの方法はまた、形態形成と系統発生の研究に有用証明するかもしれない。
Protocol
1。 VMを使用して自然主義の仮想3次元オブジェクトを作成する
- デジタル胚を作成するには、デジタル胚Workshopを使用(DEW、 表1を参照)。各実行は単一胚14、特定の実行( 図1)で使用されている設定(または"遺伝子型")の特定のセットに一意になるような形状を生成します。胚の'セル'は三角形14として表されます。
- 胚の必要な数を生成するために必要に応じて何度でもプログラムを実行します。
- より複雑な形状が望ましい場合には、胚の細胞が分裂する回数、 すなわち 、成長サイクルの数を増やします。これはまた、プログラムが遅くなることに注意してください。それはデジタル胚以外の仮想オブジェクトを作成する必要がある場合は、市販の3次元モデリングツールを使用したり、商業ベンダー( 表1)から、仮想オブジェクトを取得します。
- これは、仮想オブジェクトを保存することをお薦めしますオブジェクトが容易に商業的3次元モデリングツールキットにインポートすることができるように、そのようなOBJなどの一般的に使用されるファイル形式、のs。この目的を達成するために、露はデフォルトでOBJ形式でオブジェクトを書き込みます。
- 視覚刺激は、3次元モデリングとレンダリング環境( 表1)を使用して、1つ以上のデジタル胚を用いて生成することができる。そのような( 図2を参照)は、所望の刺激を作成するために向き、大きさ、照明、表面の質感や背景を変えるなどの標準的なグラフィック操作を使用します。
2。 VPを使用して自然主義的オブジェクトカテゴリを作成する
- オブジェクトカテゴリを生成するには、上記のステップ1.1におけるプロセスの所望の組み合わせ( 図3)9,10,12,13 を使用して、指定した先祖(または"親")オブジェクトの子孫(または'子供')を生成します。
- 幾つかの方法は、そのようなモーフィングや主成分(次の手順3と4を参照)などの滑らかな形状変化、仕事Bett製を作成するために以下で説明えー、すべての入力オブジェクトは、同じ数のセルを持ち、オブジェクトの頂点間の1対1の対応がある場合はfalse。そのようなオブジェクトを作成するための、唯一の細胞の数を変更することはありませんとオブジェクト間の頂点( 例えば 、 図3のG 3〜世代G2)の1対1の対応関係を保持しますそれらのVMのプロセスを使用します。例えば、細胞分裂やプログラム細胞死は、細胞の数を変更し、オブジェクトの特定のペアの頂点間に一対一の対応を決定するために、(17,18不可能ではないが)はるかに困難それを作る。
指定されたオブジェクト内のセルの数を変えるプロセスは、その形状の複雑さを変更することに注意してください。一般的に、細胞の数が多いほど、オブジェクトの大きい形状の複雑さとその表面スムーズ。 - 必要に応じて、デジタル胚以外の仮想オブジェクトは、VP(図4)への入力として使用することができます。
- 幾つかの方法は、そのようなモーフィングや主成分(次の手順3と4を参照)などの滑らかな形状変化、仕事Bett製を作成するために以下で説明えー、すべての入力オブジェクトは、同じ数のセルを持ち、オブジェクトの頂点間の1対1の対応がある場合はfalse。そのようなオブジェクトを作成するための、唯一の細胞の数を変更することはありませんとオブジェクト間の頂点( 例えば 、 図3のG 3〜世代G2)の1対1の対応関係を保持しますそれらのVMのプロセスを使用します。例えば、細胞分裂やプログラム細胞死は、細胞の数を変更し、オブジェクトの特定のペアの頂点間に一対一の対応を決定するために、(17,18不可能ではないが)はるかに困難それを作る。
- 特徴19の特定のディストリビューションを達成するために、指定されたカテゴリ内のオブジェクトがさらにように選択することができます。たとえば、1つは選択して、オブジェクト·サイズの二峰性分布を生成するために、指定されたカテゴリから中規模のオブジェクトを排除することができます。
- すべてのカテゴリで使用可能な形状情報を測定するための普遍的に最適である単一のメソッドがありません、また、分類のすべてのオブジェクトを20から22に対して最適な唯一の方法がある。したがって、experimentorは20から22手でのカテゴリと計算目標に基づいて、これらの方法を選択する必要があります。ステップ4使用可能な形状情報の様々な側面を操作するための一般的に使用される方法を説明します。
- カテゴリの特定のペア間の類似度を客観的に可能な系統学的方法23,24を用いて測定することができる。階層CLによって測定されるように、例えば、カテゴリの特定のペアの間の垂直(または '進化')距離R統計ツールキット内のメソッドをustering、カテゴリ類似25,26の客観的な尺度である。
3。形状変化の作成の追加方法:モーフィングデジタル
- 1オブジェクトの各頂点が他のオブジェクト( すなわち 、頂点の間の1対1の対応関係を持つオブジェクト)のちょうど1つの頂点に対応するように、オブジェクトの任意のペアを考えると、モーフィングは簡単17,18,27-29です:このでケースは、二つの物体の間の滑らかな変化(または'モーフ')はスムーズに対応する頂点と法線( 図5)の間を補間することによって生産されています。選択したオブジェクトのペアに応じて、モーフィングは、カテゴリ内の新しいカテゴリや他の子になります。
- 図5に示されているオブジェクトは、リニアモーフィング27から29を使用して作成された。オブジェクトは、他の利用可能な変形テクニック17,18の広大な配列によって(またはワープ)モーフィングできます。
- モーフィング形状の所望の分布を作成するには、それに応じて補間点を選択します。
4。形状変化の作成の追加方法:主成分
- 形状変化を生成する主要なコンポーネントを使用するために、1つは、第一主成分15を決定する必要があります。主成分は彼らに26を決定するために使用されるオブジェクトの特定のセットに固有のものです。良い結果を得るには、頂点26の間の1対1の対応で、少なくとも30のオブジェクトを使用します。
- 平均的なオブジェクトを生成する n個の入力オブジェクトの所望の組から、個別にすべてのオブジェクトの座標と各頂点の法線を平均化すること。したがって、xが与えられた頂点 kのx座標 xの平均値は、などすべてのn個のオブジェクトの頂点 kの座標、されるべきである。
- MATLAB関数princompを使用n個のオブジェクトの主要なコンポーネントを判別します。これは、対応するn-1の固有値26と一緒に、n-1個の非ゼロの固有ベクトルを生成します。
- 新しいオブジェクトを生成するために与えられた主成分から j P i は 、対応する固有値λiとA所望の重量w jと i を P掛けると平均オブジェクトに追加します。
J = J + WλiのP iの - それぞれのユニークなW j は 、固有のオブジェクトを生成します。スムーズにwを変化させることによって、人は与えられた主成分に沿って滑らかな形状のバリエーションを作成することができます。
- 独立した形状寸法に沿った形状のバリエーションを作成するには、別の主要なコンポーネントを使用して、4.4を繰り返します。
- 与えられた主成分に沿って形状の所望の分布を作成するには、wを希望するディストリビューションを使用します。</ LI>
- 形状の多次元グリッドを作成するには、いくつかの主要コンポーネントごとに重みのセットを使用します。

5。 3次元物体の触覚バージョンの作成
- 3次元プロトタイパーを(または3-D 'プリンタ')を使用して、 "プリントアウト" 3-Dオブジェクト。必要な場合は、オブジェクトのサイズを調整して印刷する前にオブジェクトの表面を滑らかにする。
6。エグゼンプラアプリケーション:画像カテゴリのベイズ推論
- 視覚処理における重要なタスクは、指定された監視対象のオブジェクトが属するカテゴリを推測しています。この推論の正確なメカニズムは不明であるが、それはオブジェクトのカテゴリを推測するように指定された画像中の物体の既知の機能に関する情報を使用することを含むことを計算および生理学的証拠9,12,13,30-32両方があります。ここでは、イラストからなるTE方法この推論プロセスはベイズの枠組みで動作する可能性があり、そしてどのようにデジタル胚、この分野の研究にも有用であり得る。
- 簡単さのために、私たちは、分類タスクはバイナリであり、カテゴリL( 図3)から区別するカテゴリKを含むことを前提としています。 Cは 、カテゴリ変数とする。我々は、C = KまたはC = Lに私はKまたはLカテゴリに属しているかどうかを観察画像によると推論されます。分類に典型的なアプローチは、含まれます。
- カテゴリは、画像内の情報が指定されて、Kである確率を計算し、pを表す(C = K | I);
- カテゴリは、画像内の情報を与えられ、Lである確率を計算し、pを表す(C = L | I)、および
- 高い確率でカテゴリを選ぶ。
- 次に、我々は、単純化のために仮定します正確に1つのバイナリ機能Fが存在すること。この機能は、イメージ内に存在する(F = 1と表される)またはイメージ(F = 0と表される)から欠けているかもしれません。この例では、 図8に示すように、 "有益なフラグメント"機能を使用します。有益なフラグメントは、第一ウルマンら33で説明された。本ケースでは、我々は、機能として、図8に示す画像テンプレート、および0.69のしきい値を使用します。この機能は、指定されたイメージ(例えば、 図3の行G3の右端の画像)に存在するか否かを決定するために、我々は、次の手順を使用します:
- 画像内のすべての可能な場所の上でこのテンプレートをスライドさせて、それぞれの場所で、鋳型とし、基本的なサブ画像との正規化相関の絶対値を計算する。
- 最高値(今回の場合0.60)でイメージの場所を選択します。
- この値がしきい値を超えている場合、結論機能が存在していることを、それ以外の場合は存在しないと結論付けている。我々のケースでは、最も高い相関0.60は0.69のしきい値を下回っているので、我々は、機能では、この画像には存在しないと結論付けている。
- このような機能を使用することの理論的根拠、および機能を選択し、そのしきい値を決定するためのメカニズムは、本報告書の範囲を超えていますが、レフリーに詳細に記載されている。 33、30。
- 機能ベースの推論の枠組みの中で、我々は、 私は 、画像からオブザーバー抽出全ての情報は、この機能の値に含まれていることを前提としています。電子は、そのP(C | I)= P(C | F)。
そのため、タスクは次のようになり、与えられた画像(有無)、コンピューP(C = K | F)のFの値を決定することとP(C = L | F)はその値Fのため、カテゴリを選択すると高いprobability。 - ベイズの枠組みでは、

そのため、
と

二つの式の分母が同じであることに注意してください。 (| F C = K)と pしたがって、pを比較する(C = L | F)は、それは分母を計算する必要はありません、むしろ、それは数量を計算するのに十分であるP(C = K | F)αP(C = K)P(F | C = K)
と
P(C = L | F)αP(C = L)P(F | C = L)
木曜日ESEは、時には "正規化されていない確率"と呼ばれています。 項p(C)は '前'と呼ばれ、任期pは(F | C)は'可能性'と呼ばれています。- 簡単にするために、我々は仮定する前に"フラット":P(C = K)= P(C = L)= 0.5である。
- (C | F)は、与えられたカテゴリーCの画像で特定の機能値の確率タスクは 、p を計算することになりました。
- (| C = L F = 1)の場合、機能はカテゴリLの画像内に存在する確率は p を計算するために、例として、カテゴリLの6つの画像( 図3)を使用します。
- pを計算するには(F = 1 | C = L)は、最初のLに属するすべての学習画像を取る。繰り返しますが、これらは、 図3に示されている。
- 各画像に対して、特徴値が1(存在するかどうかを判断として(6.3.1)に記載されている)または0(不在)、 - (6.3.3)。我々のケースでは、 図3の6つのイメージのために、値は次のとおりです:[0、0、1、0、1、0]。
- 機能の値が1である画像の割合を計算します。私たちのケースでは、2/6 = 0.33である。
- したがって、P(F = 1 | C = L)= 0.33。正確な推定値を得るには、1は、クラスごとに少なくとも30枚の画像を使用する必要があります。
- 同様に、我々は計算できるP(F = 0 | C = L)= 0.67、P(F = 1 | C = K)= 0.83、P(F = 0 | C = K)= 0.17。
- これらの値を考えると、推論を行うことができます。我々は新しいイメージ( 図9)が与えられていることを前提とし、タスクは、カテゴリラベルを決定することです。これは以下のように実行されます。
- (6.3.3) -我々は、(6.3.1)で説明したように機能Fは 、画像内に存在するかどうかを判断します。我々のケースでは、FEAトゥーレは存在していますので、F = 1。
- 方程式(1)を用いて、(2)と、で計算した値(6.7.5) - (6.7.6)、我々は計算することができますP(C = K | F = 1)= 0.42、P(C = L | F = 1)= 0.17。
- この情報を考えると、それはイメージが相対的に低い自信を持って、カテゴリkからのものであると結論することが合理的である。
- それは、生物学的システム(例えば、心理物理実験)で、そのようなアプローチをテストするために興味深く、有用である可能性があります。このケースでは、行動の予測が行われ、そのような(6.8.2)で得られたものとして計算結果と比較することができます。正確な予測を行うためには、pの良好な推定値(F | C)が必要です。このような推定は、しかし、身近なもののために得ることは困難かもしれません。その理由は、pの被験者の推定値(F | C)を直接観察し、それが主題からそれを計算することが極めて困難とされていません自然画像への事前の露出は手に負えないと不明です。デジタル胚を実験のために使用されている場合とは対照的に、それは正確に被写体がさらされている胚や胚のカテゴリ制御することが可能である。これは、被験者がさらされたのと全く同じデータから関心の数量を計算することが容易になります。それは被写体が自然なカテゴリと同じカテゴリ分類戦略を使用していることそれはそうになりますので、胚 '外観は自然主義的であるという事実は、便利です。




Representative Results
VMは、新規な3-D図形の事実上無限の供給を生成するために使用できます。 VMのアルゴリズムを使用して生成されたいくつかの模範デジタル胚は、 図1の下部パネルに表示されます。これら16胚の各々は、Cygwin用デジタル胚ツールで'growEmbryos.exe'プログラムを使用して生成された( 表1参照)40成長のためにサイクル。他のすべての成長パラメータは、プログラムで内部的に設定されていました。これらのパラメータのほとんどは(1つの胚から次と同じ、 すなわち )一定であった。そのようなモルフォゲン源の位置と強さなど、いくつかのパラメータは、実行ごとに独立してプログラムによって内部的に設定パラメータがランダムであった。これらの16個の胚のうち、形状の変化は、これらのランダムパラメータの変化の結果としてのみ生じたものである。
いくつかの任意に選ばれたテクスチャを使用して表面テクスチャリング34,35のいくつかの例は、図2Aに示されています。のビジュアルシーン図2Bに示すようにrbitrary複雑さは、市販の3次元モデリングとレンダリング環境を使用して作成できます。
デジタル胚を用いVPで生成された代表者の家系は' 図3に示します。 図4に示すように、同程度の木はまた、デジタル胚以外のオブジェクトを用いて構築することができる。実験者は、オブジェクトの他のセットのようなカテゴリを定義するのを選ぶかもしれませんが、いずれの場合も、共通の祖先を共有するオブジェクトは素直に、カテゴリを構成することに注意してください。それは、VMとVPアルゴリズムの私達の現在の実装では、ぎざぎざや平らなオブジェクトとは対照的に、比較的滑らかで、曲面を生成する傾向があることが図4からは注目に値する。 biolologicalプロセスは客観作り出すことができるので、それはまた、これはおそらく、これらのアルゴリズムではなく、アルゴリズム自体の実装の 制限であることは注目に値する平らな表面にギザギザの輪郭( 例えば 。、バラの葉)とTS。
図5と図6は、物体の形状やオブジェクトカテゴリで理にかなったバリエーションを作成するための2つに加えて使用することができる方法、またはその代わりに、VPの典型的な結果を示している。
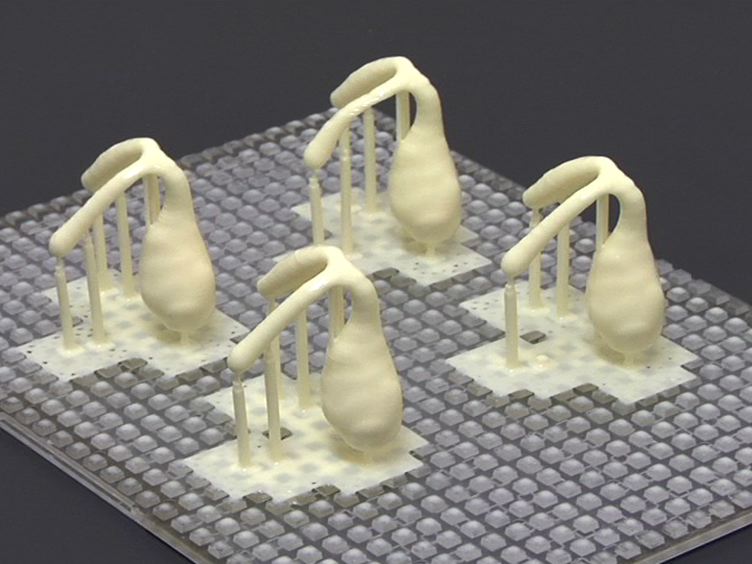
図7の上部パネルには、2つのデジタル胚の視覚的なレンダリングを示し、 図7の下部パネルには、市販の3次元プロトによって生成された対応するプリントアウトを示しています。
図8と図9は、指定されたビジュアルオブジェクトを分類するために画像の断片を使用するためのセクション6で説明した手順を示しています。

図1。仮想形態形成。 14と呼ばれる小説、自然主義的な、仮想3次元オブジェクトのタイプを示しています。モルフォゲン媒介細胞分裂、細胞増殖、細胞運動やプログラム細胞死7,8,36,37:デジタル胚が胚発生生物学の重要なプロセスのいくつかの1以上をシミュレートすることによって生成することができます。各ランは正二十面体(トップパネルに示されている)で始まり、その胚のVMパラメータ設定(または "遺伝子型")に応じて、ユニークな胚を生成します。彼らはすべての異なる遺伝子型を持っているので、このようにして、下のパネルで16胚は、形状が異なります。必要に応じて簡単に、より複雑な形状は、胚の遺伝子型を操作することによって( 例えば 、最適な視覚的な階層の特定のレベルに、神経細胞を刺激する)を生成することができることに注意してください。プログラムされた細胞死を除く上記のembryogeneticプロセスのすべてが示された胚を生成する際にシミュレートした。シミュレートされたプログラム細胞死は、特にですターゲットのくぼみ(図示せず)を作成するのに便利。

図2。デジタル胚を用いた視覚刺激を作成します。任意の仮想3次元オブジェクトと同様に、デジタル胚をグラフィカルに任意の標準的な3次元グラフィカルツールキットを使用して、任意の複雑な視覚的なシーンを作成するように操作することができる。この図は、いくつかの一般的な操作を示しています(A)は 、同じデジタル胚は、多くの異なるテクスチャを使用してテクスチャであり、左上の目に見えない光源から点灯。(B)はカモフラージュシーンをリサイズすることで作成され、デジタル胚を再配向させデジタルでそれは同じだったとテクスチャを背景にそれを置く。デジタル胚は、右下の象限の "丸見え"で見つけることができます。視覚刺激Creの追加の例については、デジタル胚を用いated、refsを参照してください。 9,10,12-14,38。

図3。 VPを使用してデジタル胚のカテゴリを作成します。VPのアルゴリズムは、いずれの場合も、新規オブジェクトとオブジェクトカテゴリになどのバリエーションが選択的に蓄積する遺伝現れることで生物の進化をエミュレートします。各世代G iで、選択された胚は、世代、G i +1につながる、子を産む。子孫は、親の形状特性を継承しますが、彼らが開発するような独自の形状変化を(それらの遺伝子型の小さな変化によって決定されるように)計上する。この図は、単一の共通祖先、正二十面体から始まる子孫の3つの世代の "家系図"を示しています。正二十面体からgeneratの形状の複雑さが増大し、この場合は、次のことを注意してくださいイオンG 1、gではなく1以降。細胞数の増加( すなわち 。、細胞分裂)正二十面体から世代G 1にさせて頂きましたので、これはですが、そうでない場合、G 1以降。一般的に、細胞分裂がこのような形状の全体的な複雑さを変えることなく、細胞運動、細胞増殖の変化形のような他の形態形成のプロセスに対し、形状の複雑さを増加させる傾向がある。

図4。 VPはデジタル胚以外の仮想オブジェクトを使用してこの図は、デジタル胚以外の仮想オブジェクトがVPへの入力として使用することができる一般的な原理を説明するのに役立ちます。現在の形でのVPアルゴリズムは、表面の三角形だけで構成されている仮想3-Dオブジェクトを操作することができます。世代G 1 comprisのED(左から右へ)ひょうたん、ダイヤモンド、フェイスマスク、リンゴ、ロック、サボテン。 VPはそれを必要としないので、この図の世代G1のオブジェクトが共通の祖先を持っていないことに注意してください。 G 2およびG 3内のオブジェクトは、G 1の岩の子孫を表しています。無細胞分裂はすべての形状の変化はもっぱら運動及び/又は指定されたオブジェクトの個々の "細胞"の成長から生じたので、どの世代では許可されませんでした。

図5。使用して、形状の滑らかなバリエーションを作成するモーフィングモーフィングするには、2つの指名の対応する頂点間を補間することによって、与えられた二つのオブジェクト(この図の左端と右端の胚)を取得し、中間オブジェクトを(胚介在する)計算する必要がdのオブジェクト。示されたケースでは、すべての頂点がモーフィング線形で、その結果、同じスカラー係数を用いて補間した。しかし、それは(図示せず)は、非直線的にオブジェクトを変形することも可能です。 2オブジェクトの頂点の間の正確な一対一の対応があるときに表示される場合のようにモーフィングは、計算は簡単です。そうやって17,18には固有の原理に基づいた方法がありませんがしかし、それは関係なく、その頂点が正確に対応するかどうかの任意の2つの指定された仮想オブジェクト間のモーフに、原理的には可能である。

図6。形状が滑らかなバリエーションを作成することが主要なコンポーネントを使用して。 (A)の平均胚。この胚は400胚(カテゴリからそれぞれ200 KおよびLでの算術平均を表す図3)。ステップ4.3で説明されるように主成分を計算した。主成分が400胚の互いに独立した、抽象的な形状寸法(図示せず)25,26を表していることに注意してください。 400胚は一緒にすべての分散、または胚では総称して使用可能な形状情報、を占める399非ゼロ主成分25,26を生じる。慣例により、主成分は、その固有値の大きい順に、またはそれらが25,26の説明全体の分散の割合で配置されている。この場合、最初の2つの主要なコンポーネントは、それぞれ73%と400胚で利用可能な形状情報の19%を占めています(B)が主成分1の異なる重みを(あるいはより正確には、重み付けされた固有値)を表す胚。重みは-0.2の等しいステップで2(左端)から-2(右端)に変化した。プリンシパルCOMPONの異なる重みを表す(C)と胚ENT 2。重量も2(左端)から-0.2の等ステップで-2(右端)に変化した。主要コンポーネントを操作すると、排他的に( 例えば 。、ケース内の胚の翼が示されている)、胚の任意の特定の身体の部分を操作しないことに注意してください。ただし、必要に応じて、仮想の身体の部分の3-Dオブジェクト(図示せず)は、市販の3次元モデリング環境のほとんどを使用して、任意のユーザー定義の方法で操作することができます。

図7。触覚オブジェクトを作成します。仮想3次元オブジェクトは、標準的な市販の3-D 'プリンタ'またはプロトを使って触覚オブジェクトとして"印刷"することができます。この図は、ビジュアルオブジェクト(一番上の行)として、または対応する触覚オブジェクト(下の行)のようにレンダリングされたデジタル胚を示しています。触覚オブジェクトのオブジェクトが非常に小さい、または大きいサイズでプリントすることができますが、この図ではhownは、約6センチ幅(スケールバー= 1 cm)である印刷された。

図8。例有益なフラグメントのテンプレートは、この例では、テンプレートは、それに関連付けられた0.69のしきい値があります。

図9:オブジェクトカテゴリが知られていないと判断される必要があるため、新しいイメージ。
Discussion
認知科学研究のVMとVPの有用性
我々は以前に詳細L9 ,10,12-14のVMとVPの有用性を説明してきました。それは小説が、自然主義的な3-Dオブジェクト14を作成するための原則的かつ柔軟な方法を提供するので、簡単に説明すると、特に、VM、デジタル胚の方法論は、便利です。同様に、VPは自然主義的なカテゴリ9,10,12,13作成の原理に基づいた方法を提供します。これは、オブジェクトのカテゴリはカテゴリは自然の中で階層的になる傾向があるという事実を含め、本質的にオブジェクトのカテゴリとVPのシェアの多くの機能によって生成されたことは注目に値しますし、カテゴリ内および間での機能のバリエーションは分類のために独自に実験やアルゴリズムの生じるその39。
現在の制限と今後の方向性
三現在の我々のプロトコルの限界や、彼らは示唆している将来の仕事の方向性特に注目されています:まず、VMとVPの両方は、生物学的プロセスをシミュレートします。我々は、非生物学的な仮想オブジェクトは、これらのプロセスのための基材として使用できることを示しているが、基礎プロセスは依然として生物学的に動機づけられています。しかし、天然物 - 同様に、生物学的および非生物 - 非生物学的な力による形状変化を受ける。例えば、岩は、浸食や堆積などの地質学的過程に起因する形状に変更されることがあります。岩の新しいカテゴリは、他のそのような地質学的過程から発生する可能性がある。これは、利用可能な形状変化アルゴリズムのレパートリーに、これらのプロセスを組み込むことが比較的簡単であるべきです。
我々のプロトコルの第2の主要な制限は、 動的な形状変化の現在のレパートリーはかなり限られていることです。それはそのような生物学的な動き、またはそのような風、水や重力などの外力による運動などの形状変化の大きい配列を組み込むことが望ましい。我々は、それがウィルことを期待lは、このような動的な形状変更を実装するために知られているコンピュータ·アニメーションのアルゴリズムを負担することに持参するのは比較的簡単である。
我々のプロトコルの第三の主要な制限は、VMが現在原腸陥入36、最も顕著なのは、を含む他の多くの既知の形態形成のプロセスが含まれていないことです。また、理由の細胞壁の可能性はほとんどあるいはまったく細胞の動きを受けて、その植物の形態形成は、成長によって完全に媒介されているという事実など、いくつかの既知の制約、、、36を組み込むために失敗します。同様に、VPは、遺伝的浮動40などの他の既知の系統学的プロセスは含まれません。これらの制限に対処するには、発達の生態学と進化シミュレーションで、我々のプロトコルの使用を容易に大いに役立つだろう。
Disclosures
特別な利害関係は宣言されません。
Acknowledgments
この作品は、米陸軍研究所と米陸軍研究局助成W911NF1110105とNSFの助成金、IOS-1147097toジェイHegdéによって部分的にサポートされていました。また、サポートはジョージア健康科学大学のビジョンディスカバリー研究所からジェイHegdéへのパイロットの助成金によって提供されていました。ダニエルKersten氏は、韓国の国立研究財団(R31-10008を介して、文部科学省によって資金を供給されてWCU(ワールドクラスの大学)プログラムで助成ONR N00014-05-1から0124までおよびNIH R01 EY015261と部分的に支持された)。カリンHauffenは、米陸軍の学部研究実習プログラム(URAP)によってサポートされていました。
Materials
| Name | Company | Catalog Number | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. | |||
References
- Palmeri, T. J., Gauthier, I. Visual object understanding. Nat. Rev. Neurosci. 5, 291-303 (2004).
- Seger, C. A., Miller, E. K. Category learning in the brain. Annu. Rev. Neurosci. 33, 203-219 (2010).
- Perceptual Learning. Fahle, M., Poggio, T. , MIT Press. (2002).
- Ashby, F. G., Maddox, W. T. Human category learning. Annu. Rev. Psychol. 56, 149-178 (2005).
- Gauthier, I., Tarr, M. J. Becoming a "Greeble" expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Fragment-based learning of visual categories. Bart, E., Hegdé, J., Kersten, D. Cosyne 2008 Conference, 2008 Feb 28-Mar 2, Salt Lake City, , Cosyne. Salt Lake City. 121-12 (2008).
- Ball, P. Nature's patterns : a tapestry in three parts. , Oxford University Press. (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D. Bootstrapped learning of novel objects. J. Vis. 3, 413-422 (2003).
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M. Feature-based volume metamorphosis. SIGGRAPH. , 449-456 (1995).
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. Numerical geometry of non-rigid shapes. , Springer. (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. Pattern classification. , 2nd edn, Wiley. (2001).
- Bishop, C. M. Pattern recognition and machine learning. , Springer. (2006).
- Theodoridis, S., Koutroumbas, K. Pattern recognition. , 3rd edn, Academic Press. (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , 4th edn, W.H. Freeman and Co. (2011).
- Tuffery, S. Data mining and statistics for decision making. , Wiley. (2011).
- Crawley, M. J. Statistical Computing: An Introduction to Data Analysis using S-Plus. , Wiley. (2002).
- Venables, W. N., Ripley, B. D. Modern Applied Statistics with S. , Springer. (2003).
- Beier, T., Neely, S. Feature-based image metamorphosis. SIGGRAPH. 26, 35-42 (1992).
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. Warping and morphing of graphical objects. , Morgan Kaufmann Publishers. (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , IEEE Computer Society Press. (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. Computer graphics. , Nova Science Publishers. (2011).
- Lengyel, E. Mathematics for 3D game programming and computer graphics, third edition. , 3rd Ed, Cengage Learning. (2011).
- Gilbert, S. F. Developmental biology. , 9th edn, Sinauer Associates. (2010).
- Gilbert, S. F., Epel, D. Ecological developmental biology : integrating epigenetics, medicine, and evolution. , Sinauer Associates. (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E. Categorization of natural objects. Annual Review of Psychology. 32, 89-115 (1981).
- Futuyma, D. J. Evolution. , 2nd edn, Sinauer Associates. (2009).