Summary
Nós descrevemos uma nova metodologia para a criação de naturalistas objetos 3-D e categorias de objetos com variações característica precisamente definidos. Nós usamos simulações dos processos biológicos de morfogênese e filogênese para criar novos, naturalistas virtuais objetos 3-D e categorias de objetos que podem ser processados como imagens visuais ou objetos táteis.
Abstract
A fim de estudar quantitativamente a percepção do objeto, seja pela percepção de sistemas biológicos ou por máquinas, é preciso criar objetos e categorias de objetos com precisão definível, de preferência naturalista, propriedades 1. Além disso, para estudos sobre o aprendizado perceptual, é útil para criar novos objetos e categorias de objetos (ou classes de objetos) com tais propriedades 2.
Muitos métodos inovadores e úteis existem atualmente para a criação de novos objetos e categorias objeto 3-6 (ver também refs. 7,8). No entanto, de modo geral, os métodos existentes têm três tipos de deficiências.
Em primeiro lugar, as variações de forma são geralmente imposta pelo experimentador 5,9,10, e podem, portanto, ser diferente da variabilidade categorias naturais, e optimizado para um algoritmo de reconhecimento particular. Seria desejável ter as variações surgem independentemente do externally impôs restrições.
Em segundo lugar, os métodos existentes têm dificuldade em captar a complexidade forma dos objectos naturais 11-13. Se o objetivo é estudar a percepção do objeto natural, é desejável que os objetos e categorias objeto a ser naturalista, de modo a evitar possíveis confunde e casos especiais.
Em terceiro lugar, é geralmente difícil de medir quantitativamente a informação disponível nos estímulos criados através de métodos convencionais. Seria desejável para criar objectos e categorias de objectos em que a informação disponível pode ser medido com precisão e, se necessário, sistematicamente manipulada (ou "afinado"). Isto permite que se formulam as tarefas de reconhecimento de objectos subjacentes, em termos quantitativos.
Aqui nós descrevemos um conjunto de algoritmos ou métodos que atendam todos os três critérios acima. Morfogênese virtual (VM) cria novos, naturalistas virtuais objetos 3-D chamados "embriões digitais" porsimulando o processo biológico de embriogénese 14. Virtual filogênese (VP), cria novas categorias de objeto, naturalistas, simulando o processo evolutivo da seleção natural 9,12,13. Objetos e categorias de objetos criados por essas simulações podem ser ainda manipulados por vários métodos de morphing para gerar variações sistemáticas de características de forma 15,16. O vice-presidente e morphing métodos também podem ser aplicadas, em princípio, a novela objetos virtuais que não sejam embriões digitais, ou a versões virtuais de objetos do mundo real 9,13. Objetos virtuais criados desta forma pode ser processado como imagens visuais usando uma ferramenta gráfica convencional, com manipulações desejados de superfície, textura, iluminação, tamanho ponto de vista, e do fundo. Os objetos virtuais também pode ser 'impresso' como objetos táteis usando um convencional 3-D prototyper.
Descrevemos também algumas implementações destes algoritmos computacionais para ajudar ilustratrar a utilidade potencial dos algoritmos. É importante distinguir os algoritmos de suas implementações. As implementações são demonstrações oferecidos apenas como uma "prova de princípio" dos algoritmos subjacentes. É importante notar que, em geral, uma implementação de um algoritmo computacional frequentemente tem limitações que o próprio algoritmo não tem.
Juntos, estes métodos representam um conjunto de ferramentas poderosas e flexíveis para estudar o reconhecimento de objetos e aprendizado perceptual por sistemas biológicos e computacionais semelhantes. Com as extensões apropriadas, estes métodos podem também ser úteis no estudo da morfogénese e filogênese.
Protocol
1. Criando naturalistas virtuais objetos 3-D usando VM
- Para criar embriões digital, utilize o Workshop Embrião Digital (DEW, ver Tabela 1). Cada execução gera um único embrião 14, a forma do que é único para um dado conjunto de configurações (ou "genótipo") usado para a execução dada (Figura 1). As "células" do embrião são representados como triângulos 14.
- Executar o programa tantas vezes quantas necessárias para gerar o número desejado de embriões.
- Se as formas mais complexas são desejados, aumentar o número de ciclos de crescimento, isto é, o número de vezes que as células do embrião dividem. Note-se que este também irá retardar o programa. Se é necessário criar objectos virtuais diferentes embriões digitais, utilizar comercialmente disponíveis ferramentas 3-D de modelagem ou obtenção de objectos virtuais a partir de fornecedores comerciais (Tabela 1).
- É aconselhável para salvar o objeto virtuals em um formato de arquivo normalmente utilizados, tais como OBJ, de modo que os objetos podem ser facilmente importado para um conjunto de ferramentas de modelação comercial 3-D. Para este fim, o orvalho escreve objetos em formato OBJ por padrão.
- Estímulos visuais podem ser gerados usando um ou mais embriões digitais usando um modelo 3-D e do ambiente de processamento (Tabela 1). Utilizar operações padrão de gráficos tais como a variação da orientação, tamanho, textura da superfície de iluminação, e do fundo para criar o estímulo desejado (ver Figura 2).
2. Criando Categorias de objeto naturalistas usando VP
- Para gerar categorias de objeto, gerar descendentes (ou "crianças") do ancestral dado (ou "mãe") objeto usando uma combinação desejada dos processos em Passo 1.1 acima (Figura 3) 9,10,12,13.
- Alguns métodos descritos abaixo para criar variações de forma suave, como morphing ou componentes principais (ver Etapas 3 e 4), o trabalho better se todos os objectos de entrada têm o mesmo número de células e, se houver um-para-uma correspondência entre os vértices dos objectos. Para a criação de tais objectos, utilizar apenas os processos de VM que não vai mudar o número de células e irá preservar a correspondência de um-para-um dos vértices entre os objectos (ver, por exemplo, 2 a gerações G G 3 na Figura 3). Por exemplo, a divisão celular e morte celular programada alterar o número de células, e torná-lo muito mais difícil (apesar de não impossível 17,18) para determinar um-para-um entre os vértices de um dado par de objectos.
Note-se que os processos que alteram o número de células em um dado objecto igualmente alterar a sua complexidade de forma. Em geral, quanto maior o número de células, a maior complexidade da forma do objecto e a sua superfície mais lisa. - Se necessário, os objectos virtuais diferentes embriões digitais podem ser utilizados como entradas para VP (Figura 4).
- Alguns métodos descritos abaixo para criar variações de forma suave, como morphing ou componentes principais (ver Etapas 3 e 4), o trabalho better se todos os objectos de entrada têm o mesmo número de células e, se houver um-para-uma correspondência entre os vértices dos objectos. Para a criação de tais objectos, utilizar apenas os processos de VM que não vai mudar o número de células e irá preservar a correspondência de um-para-um dos vértices entre os objectos (ver, por exemplo, 2 a gerações G G 3 na Figura 3). Por exemplo, a divisão celular e morte celular programada alterar o número de células, e torná-lo muito mais difícil (apesar de não impossível 17,18) para determinar um-para-um entre os vértices de um dado par de objectos.
- Os objetos dentro de uma determinada categoria podem ser ainda seleccionados de modo a alcançar uma dada distribuição de características 19. Por exemplo, pode-se eliminar selectivamente médias objetos a partir de uma determinada categoria, a fim de gerar uma distribuição bimodal do tamanho do objecto.
- Não há um método único que é universalmente óptima para a medição da informação da forma disponível para todas as categorias, nem há um único método que é o ideal para categorizar todos os objectos 20-22. Assim, o experimentor deve escolher os métodos com base nas categorias e objetivos computacionais na mão 20-22. Passo 4 descreve um método vulgarmente utilizado para a manipulação de vários aspectos da informação da forma disponível.
- A semelhança entre um determinado par de categorias podem ser objetivamente medidos usando métodos filogenéticos disponíveis 23,24. Por exemplo, a distância (ou 'evolutivo') vertical entre um dado par de categorias, tal como medido por cl hierárquicaustering métodos da estatística R toolkit, é uma medida objetiva de similaridade categoria 25,26.
3. Métodos adicionais de Criação de variação da forma: Digital Morphing
- Dado qualquer par de objetos, de modo que cada vértice de um objeto corresponde a exatamente um vértice do outro objeto (. Isto é, objetos com um-para-um entre vértices), morphing é 17,18,27-29 simples: Neste caso, as variações suaves (ou "morphs ') entre os dois objectos são facilmente produzidos por interpolação entre os vértices correspondentes e normais (Figura 5). Dependendo do par de objectos seleccionados, morphing irá resultar em novas categorias ou crianças adicionais dentro de uma categoria.
- Os objectos apresentados na Figura 5 foram criados usando linear 27-29 morphing. Os objetos podem ser transformado (ou deformado) por uma vasta gama de outras técnicas de deformação disponíveis 17,18.
- Para criar uma distribuição desejada de formas morphed, escolher os pontos de interpolação de acordo.
4. Métodos adicionais de Criação de variação da forma: Componentes Principais
- A fim de utilizar os componentes principais para gerar variações de forma, é necessário em primeiro lugar determinar as componentes principais 15. Os componentes principais são específicas para um determinado conjunto de objectos utilizados para a determinação los 26. Para obter bons resultados, utilizar pelo menos 30 objetos com um-para-um entre os vértices 26.
- Gerar um objeto média a partir de um conjunto de objetos de entrada desejado n, por separadamente média as coordenadas e normal de cada vértice em todos os objetos. Assim, a coordenada x de um dado vértice k deve ser a média das coordenadas x k de vértice de todos os objectos de n, e assim por diante.
- Use o Matlab função PRINCOMPpara determinar os componentes principais dos objectos n. Isto gerará n-1 não-zero autovetores, juntamente com o correspondente n-1 eigenvalues 26.
- Para gerar um novo objeto Um j de um componente principal dado P i, multiplicar P Eu pelo correspondente autovalor λ i e desejado um peso w j e adicione ao objeto média:
A j = j + w λ i P i - Cada único w j irá gerar um objeto exclusivo. Por w varia suavemente, pode-se criar variantes de forma lisa ao longo de um dado componente principal.
- Para criar variações forma ao longo de uma dimensão forma independente, repita o passo 4,4 usando um componente principal diferente.
- Para criar uma distribuição desejada de formas ao longo de um dado componente principal, utilize a distribuição desejada de w. </ Li>
- Para criar uma rede multi-dimensional de formas, utilize um conjunto de pesos para cada um dos vários componentes principais:

5. Criando versões Táteis de objetos 3-D
- 'Imprimir' objetos 3-D usando um prototyper 3-D (ou 3-D 'impressora'). Se necessário, ajuste o tamanho do objeto e alisar a superfície do objeto antes da impressão.
6. Uma Aplicação Exemplar: Inferência Bayesiana da categoria Imagem
- Uma tarefa importante no processamento visual é inferir a categoria para a qual um determinado objeto observado pertence. Embora o mecanismo exato desta inferência é desconhecida, há tanto evidências computacional e fisiológica 9,12,13,30-32 que envolve o uso das informações sobre as características conhecidas do objeto na imagem dada para inferir a categoria do objeto. Aqui, vamos Illustrate como este processo inferencial pode funcionar em um contexto Bayesiano, e como digital de embriões podem ser úteis para a investigação nesta área.
- Para simplificar, vamos supor que a tarefa de categorização é binário e envolve K categoria distinta da categoria L (Figura 3). Seja C a variável categoria. Iremos inferir que C = K = L ou C de acordo com se a imagem observada I pertence à categoria K ou L. Uma abordagem típica de categorização envolve:
- Calcular a probabilidade de que a categoria é K, dada a informação na imagem, indicada p (C = K | I);
- Calcular a probabilidade de que a categoria é L, dada a informação na imagem, indicada p (C = L | I); e
- Escolher a categoria com o maior probabilidade.
- Em seguida, vamos assumir por simplicidadeque não é exatamente uma característica F binário. Esta característica pode ser quer presente na imagem (denominados F = 1) ou ausente da imagem (denominados F = 0). Este exemplo irá utilizar o "fragmento informativo" característica mostrada na Figura 8. Fragmentos informativos foram primeiramente descrita por Ullman e seus colegas 33. No presente caso, usaremos o modelo de imagem mostrado na Figura 8 como a característica, e um valor de limiar de 0,69. Para determinar se esse recurso está presente em uma determinada imagem (por exemplo, a imagem mais à direita na linha G3 na Figura 3), vamos usar os seguintes passos:
- Deslizar sobre este modelo de todas as localizações possíveis na imagem e calcular, em cada local, o valor absoluto de correlação cruzada normalizado entre o modelo e a imagem de sub-base.
- Seleccionar a localização da imagem com o valor mais elevado (0,60, no caso presente).
- Se este valor for superior ao limiar, concluirque o recurso está presente, caso contrário, concluir que ele está ausente. No nosso caso, uma vez que a maior correlação 0,60 é inferior ao limiar de 0,69, nós concluímos que o recurso está ausente nessa imagem.
- A lógica de utilização de tais recursos, e os mecanismos de seleção dos recursos e determinar os seus limites estão além do escopo deste relatório, mas são descritos em detalhes no refs. 33, 30.
- No âmbito do recurso com base em inferência, assumimos que todas as informações dos extratos observador da imagem está contida no valor deste recurso, i. e, que p (C | I). = p (C | F).
Portanto, torna-se a tarefa de determinar que o valor de F na imagem determinada (presente ou ausente), a computação p (C = K | F) e p (C = L | F) para que o valor F, e seleccionando a categoria com quanto maior probabilidade. - No âmbito Bayesiana,

Portanto,
e

Note-se que o denominador nas duas equações é o mesmo. Por conseguinte, para comparar p (C = K | F) e p (C = L | F), não é necessário calcular o denominador, em vez disso, é suficiente para calcular as quantidadesp (C = K | F) α p (C = K) p (F | C = K)
e
p (C = L | F) α p (C = L) p (F | C L =)
These são às vezes chamados de "probabilidades unnormalized. O termo p (C) é chamado de 'antes' eo termo p (F | C) é chamado de 'probabilidade'.- Para simplificar, vamos assumir um 'flat' antes: p (C = K) = p (C = L) = 0,5.
- A tarefa é agora de calcular p (F | C), a probabilidade de um valor de função de constantes de uma imagem de uma dada categoria C.
- Usaremos os seis imagens da categoria L (Figura 3), como um exemplo para calcular p (F = 1 | C = L), a probabilidade de que a funcionalidade presente em uma imagem de L categoria.
- Para calcular p (F = 1 | C = L), primeiro exame de todas as imagens de formação que pertencem a L. Mais uma vez, estes são mostrados na Figura 3.
- Para cada imagem, determinar se o valor recurso é 1 (presente) Ou 0 (ausente), como descrito em (6.3.1) - (6.3.3). No nosso caso, as seis imagens na Figura 3, os valores são os seguintes: [0, 0, 1, 0, 1, 0].
- Calcular a fracção de imagens em que a característica é o valor 1. No nosso caso, é de 2/6 = 0,33.
- Assim, p (F = 1 | C = L) = 0,33. Note-se que a precisão da estimativa, deve-se usar pelo menos 30 imagens por classe.
- De uma maneira semelhante, pode-se calcular que p (F = 0 | C = L) = 0,67, p (F = 1 | C = K) = 0,83, p (F = 0 | C = K) = 0,17.
- Tendo em conta estes valores, inferência pode ser realizada. Assuma que nos é dado uma nova imagem (Figura 9), e trata-se de determinar a sua etiqueta categoria. Isto é realizado como se segue:
- Nós determinamos se a F característica está presente na imagem, como descrito em (6.3.1) - (6.3.3). No nosso caso, a featura está presente, de forma F = 1.
- Utilizando as equações (1) e (2), e os valores calculados em (6.7.5) - (6.7.6), pode-se calcular que p (C = K | F = 1) = 0,42 e p (C = L | F = 1) = 0,17.
- Perante esta informação, é racional concluir que a imagem é de categoria K, com confiança relativamente baixo.
- Pode ser interessante e útil para testar uma tal abordagem num sistema biológico (por exemplo, psicofisicamente). Neste caso, as previsões de comportamento pode ser feita, e comparados com os resultados computacionais, tais como as obtidas em (6.8.2). Para fazer previsões precisas, boas estimativas de p (F | C) são necessários. Tais estimativas, no entanto, pode ser difícil para a obtenção de objectos familiares. A razão é que a estimativa de um sujeito de p (F | C) não é observável directamente, e é extremamente difícil de calcular que uma vez que o sujeitoExposição prévia 's para imagens naturais é incontrolável e desconhecido. Em contraste, se os embriões digitais são utilizadas para as experiências e, em seguida, é possível controlar com precisão quais os embriões e categorias de embrião de o sujeito é exposto a. Isto torna mais fácil de calcular as quantidades de interesse a partir de exactamente os mesmos dados o sujeito foi exposto. O fato de que a aparência embriões "é naturalista é útil, já que torna mais provável que o assunto está usando a estratégia de categorização mesmo que com categorias naturais.




Representative Results
VM pode ser usado para gerar uma fonte virtualmente ilimitada de formas novas 3-D. Alguns embriões exemplares digitais gerados usando o algoritmo de VM são mostrados no painel inferior da Figura 1. Cada um destes 16 embriões foram gerados usando o programa "growEmbryos.exe 'nas ferramentas de embrião digitais para Cygwin (ver Tabela 1) durante 40 crescimento ciclos. Todos os outros parâmetros de crescimento foram definidos internamente pelo programa. A maioria destes parâmetros foram constantes (isto é, idêntico a partir de um embrião para o outro). Alguns parâmetros como a localização ea força de fontes de morfogénios, foram estabelecidos parâmetros aleatórios internamente pelo programa de forma independente para cada execução. As variações de formas entre estes 16 embriões surgiram apenas como resultado das variações nestes parâmetros aleatórios.
Alguns exemplos de texturização de superfície 34,35 usando algumas texturas arbitrariamente escolhidos, são mostrados na Figura 2A. Cenas visuais de umcomplexidade rbitrary podem ser criadas usando um disponível comercialmente modelagem 3-D e do ambiente de processamento, como mostrado na Figura 2B.
"Árvore de família" Um representante gerado por VP digitais usando embriões é mostrada na Figura 3. Árvores comparáveis podem também ser construídas utilizando objectos que não sejam os embriões digitais, como se mostra na Figura 4. Note-se que em ambos os casos, os objectos que partilham um ancestral comum diretamente constituem uma categoria, embora o experimentador pode também escolher definir uma categoria que qualquer outro conjunto de objectos. Vale a pena notar a partir da Figura 4, que a nossa implementação atual da VM e algoritmos VP tende a produzir relativamente suave, superfícies curvas, em vez de objetos pontiagudos ou apartamento. É importante notar também que este é provavelmente a limitação de nossa implementação destes algoritmos e não os algoritmos em si, já que os processos biolological pode produzir objectivosts com superfícies planas e contornos irregulares (por ex., rosa folha).
As Figuras 5 e 6 ilustram os resultados dos dois métodos típicos que podem ser utilizados em adição a, ou em vez de, de VP para criar variações em forma de princípio objecto e categorias de objectos.
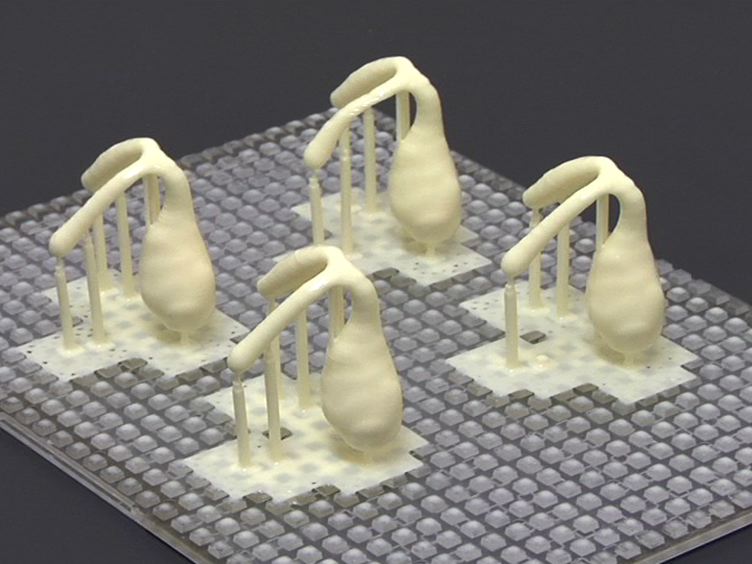
O painel superior da Figura 7 ilustra representações visuais dos dois embriões digitais, e o painel inferior da Figura 7 ilustra as impressões correspondentes gerados por um comercialmente disponível prototyper 3-D.
Figuras 8 e 9 ilustram os procedimentos descritos na seção 6 para usar fragmentos de imagem para classificar um determinado objeto visual.

Figura 1. Morfogênese virtual. 14. Embriões digitais podem ser gerados através da simulação de um ou mais de alguns dos principais processos de embriogénese biológico: morfogénio mediada por divisão celular, crescimento celular, movimento celular e morte celular programada 7,8,36,37. Cada corrida começa com um icosaedro (mostrado no painel superior), e gera um único embrião, dependendo das definições de parâmetros de VM (ou o "genótipo") de que o embrião. Assim, os 16 embriões no painel de fundo de diferentes formas, porque todos eles têm diferentes genótipos. Note-se que mais simples ou mais formas complexas podem ser gerados quando necessário (por exemplo, para estimular os neurónios optimamente com um dado nível da hierarquia visual) através da manipulação do genótipo do embrião. Todos os processos acima referidos, com excepção embryogenetic morte celular programada foi simulado em gerar os embriões mostrado. Morte celular programada simulado é especialmenteútil para criar entalhes alvo (não mostrado).

Figura 2. Criar estímulos visuais usando embriões digitais. Como qualquer objeto virtual 3-D, os embriões digitais podem ser graficamente manipulado para criar cenas visuais de complexidade arbitrária usando qualquer conjunto de ferramentas 3-D padrão gráfico. Esta figura ilustra algumas manipulações comuns. (A) O mesmo embrião digital é texturizada utilizando muitas texturas diferentes, e iluminado por uma fonte de luz invisível no canto superior esquerdo. (B) Uma cena camuflada é criado através do redimensionamento e re-orientar o embrião digital e digitalmente colocando-o contra o mesmo fundo foi texturizado com. O embrião digital pode ser encontrado em 'vista de todos ", no quadrante inferior direito. Para exemplos adicionais de estímulos visuais CREated uso de embriões digitais, ver refs. 9,10,12-14,38.

Figura 3. Criação de categorias de embrião digitais usando VP. VP O algoritmo simula a evolução biológica, em que em ambos os casos, objetos novos e categorias de objetos surgem como variações hereditárias acumular seletivamente. A cada geração G i, os embriões selecionados procriar, levando a geração G i +1. A progênie herdam as características da forma de seu pai, mas acumulam variações forma própria (como determinado por pequenas variações em seu genótipo) como elas se desenvolvem. Esta figura mostra uma "árvore genealógica" de três gerações de descendentes a partir de um único ancestral comum, um icosaedro. Note-se que, neste caso, o aumento da complexidade da forma do icosaedro para gerion G 1, mas não a partir de G a frente 1. Isto é porque no aumento do número de células (isto é., A divisão celular) foi deixada a partir do icosaedro a geração G 1, mas não a partir de G a frente 1. Em geral, a divisão das células tende a aumentar a complexidade de forma, ao passo que outros processos morfogenéticos tais como o movimento das células e forma da célula, sem alterar a mudança do crescimento da complexidade global da forma.

Figura 4. VP usando objetos virtuais que não sejam embriões digitais. Este valor ajuda a ilustrar o princípio geral de que os objetos virtuais que não sejam embriões digitais podem ser usados como entrada para VP. O algoritmo VP em sua forma atual pode operar em qualquer objeto virtual em 3-D, cuja superfície consiste unicamente de triângulos. Geração G 1 comprised de (da esquerda para a direita) uma cabaça, diamante, máscara facial, maçã, rock, e um cacto. Note-se que os objetos em uma G geração nesta figura não têm um ancestral comum, porque VP não o exigir. Objetos em G 2 e G 3 representam os descendentes do rock em G 1. Não há divisões celulares foram autorizados em qualquer geração, de modo que todas as variações da forma surgiu apenas a partir do movimento e / ou crescimento do indivíduo "células" de um dado objeto.

Figura 5. Usando morphing para criar variações suaves em forma. Morphing envolve tomar dois objetos dados (extrema esquerda e extrema direita embrião nesta figura) e calculando os objetos intermediários (intervindo embriões) por interpolação entre os vértices correspondentes do designar doisobjetos d. No caso mostrado, todos os vértices foram interpolados utilizando o factor escalar mesma, resultando num morphing linear. No entanto, é igualmente possível transformar os objectos de forma não linear (não mostrado). Morphing é computacionalmente simples quando existe uma correspondência de um-para-um entre os vértices exacto de dois objectos, como no caso mostrado. No entanto, é possível, em princípio, de se transformar entre quaisquer dois determinados objectos virtuais, independentemente de seus vértices correspondem exactamente, embora não exista um método único de princípio para isso 17,18.

Figura 6. A utilização de componentes principais para criar variações suaves na forma. (A) Média embrião. Este embrião representa a média aritmética de 400 embriões (200 cada de categorias K e L emFigura 3). Os componentes principais foram calculados como descrito no passo 4.3. Observe que os componentes principais representam mutuamente independentes, dimensões forma abstrata dos 400 embriões (não mostrado) 25,26. 400 embriões produzir 399 não-zero componentes principais 25,26, que juntos respondem por toda a variância, ou a informação de forma, disponível coletivamente nos embriões. Por convenção, os principais componentes são arranjados na ordem decrescente dos seus valores próprios, ou a proporção da variância total que explicam 25,26. Neste caso, os dois primeiros componentes principais, respectivamente, responsável por 73% e 19% da informação de forma disponível nos 400 embriões. (B) Os embriões que representam pesos diferentes (ou mais precisamente, eigenvalues ponderadas) de Componente Principal 1. Os pesos variaram de 2 (extrema esquerda) a -2 (extrema-direita) em passos iguais de -0,2. (C) Os embriões que representam diferentes pesos de COMPON principalent 2. Os pesos também variou de 2 (extrema esquerda) a -2 (extrema-direita) em passos iguais de -0,2. Note-se que a manipulação de componentes principais não exclusivamente manipular qualquer parte do corpo, específica do embrião (p. ex., As asas do embrião no caso mostrado). No entanto, se for necessário, partes do corpo de virtuais objectos 3-D podem ser manipulados de qualquer forma arbitrária definida pelo utilizador utilizando a maior parte dos comercialmente disponíveis 3-D ambientes de modelagem (não mostrada).

Figura 7. Criação de objetos táteis. Virtual objetos 3-D pode ser 'impresso' como objetos táteis usando um padrão, disponível comercialmente em 3-D 'impressora' ou prototyper. Esta figura mostra embriões digitais prestados como objetos visuais (fila de cima) ou como os objetos táteis correspondentes (linha de fundo). Os objetos táteis shown nesta figura foram impressas em cerca de 6 cm de largura (barra de escala = 1 cm), embora os objetos podem ser impressas em tamanhos muito menores ou maiores.

Figura 8. Um modelo para um fragmento de exemplo informativo. Neste exemplo, o molde tem um limite de 0,69 a ela associados.

Figura 9. Uma nova imagem para o qual a categoria de objecto não é conhecido e tem de ser determinado.
Discussion
Utilidade da VM e VP de Pesquisa em Ciência Cognitiva
Nós já descreveu a utilidade de VM e VP em detalhes l9 ,10,12-14. Resumidamente, VM, especialmente a metodologia embrião digital, é útil porque proporciona um método de princípios e flexível para a criação de novo, mas naturalistas objectos 3-D 14. Da mesma forma, VP fornece um método de princípio de criação de categorias naturalistas 9,10,12,13. Vale a pena notar que as categorias de objetos gerados por características partes VP muitos com categorias de objetos na natureza, incluindo o fato de que as categorias tendem a ser de natureza hierárquica, e as variações de recursos dentro e através de categorias surgir independentemente do experimentador e os algoritmos de classificação los 39.
Limitações atuais e perspectivas futuras
Três limitações atuais do nosso protocolo e as direções para trabalhos futuros sugeremsão particularmente notáveis: Primeiro, tanto VM e VP simular processos biológicos. Enquanto que mostram que não biológicos objectos virtuais podem ser utilizados como substratos para estes processos, os processos subjacentes são ainda biologicamente motivados. No entanto, os objetos naturais - biológicos e não biológicos parecidos - sofrer alterações de forma, devido à não-biológicos forças. Por exemplo, as pedras podem ser alterados na forma devido a processos geológicos, tais como a erosão ou sedimentação. Novas categorias de rocha pode surgir de outros tais processos geológicos. Ele deve ser relativamente simples de incorporar esses processos no repertório de algoritmos de alteração disponíveis de forma.
A segunda limitação importante do nosso protocolo é que seu repertório atual de mudanças de forma dinâmica é bastante limitada. É desejável a incorporação de uma maior variedade de alterações de forma, tais como movimento biológico, ou movimento devido a forças externas como o vento, a água, ou a gravidade. Esperamos que will ser relativamente simples de trazer para os algoritmos de animação conhecidos de computador para implementar tais mudanças de forma dinâmica.
A terceira limitação importante do nosso protocolo é que VM atualmente não inclui muitos outros processos morfogenéticos conhecidos, incluindo, principalmente, a gastrulação 36. Também não incorporar algumas limitações conhecidas, tais como o facto de que a morfogénese em plantas é mediada exclusivamente por crescimento, com o movimento de células pouco ou nenhum possível, em virtude das paredes das células 36. Da mesma forma, VP não inclui outros processos filogenéticos conhecidos, tais como a deriva genética 40. Enfrentar essas limitações ajudaria facilitar muito o uso do nosso protocolo em desenvolvimento, simulações ecológicos e evolutivos.
Disclosures
Não há conflitos de interesse declarados.
Acknowledgments
Este trabalho foi financiado em parte pelo Exército dos EUA Laboratório de Pesquisa e os EUA Army Research Office concessão W911NF1110105 e concessão do NSF IOS-1147097to Jay Hegde. O suporte também foi fornecida por uma concessão piloto Jay Hegde do Discovery Visão Instituto de Ciências da Saúde da Geórgia University. Daniel Kersten foi suportado por concessões ONR N00014-05-1-0124 e NIH R01 EY015261 e em parte por WCU programa (World Class University), financiado pelo Ministério da Educação, Ciência e Tecnologia, através da Fundação Nacional de Pesquisa da Coreia (R31-10008 ). Karin Hauffen foi apoiado pelo Programa de Graduação de Pesquisa de Aprendizagem (URAP) do Exército dos EUA.
Materials
| Name | Company | Catalog Number | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. | |||
References
- Palmeri, T. J., Gauthier, I. Visual object understanding. Nat. Rev. Neurosci. 5, 291-303 (2004).
- Seger, C. A., Miller, E. K. Category learning in the brain. Annu. Rev. Neurosci. 33, 203-219 (2010).
- Perceptual Learning. Fahle, M., Poggio, T. , MIT Press. (2002).
- Ashby, F. G., Maddox, W. T. Human category learning. Annu. Rev. Psychol. 56, 149-178 (2005).
- Gauthier, I., Tarr, M. J. Becoming a "Greeble" expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Fragment-based learning of visual categories. Bart, E., Hegdé, J., Kersten, D. Cosyne 2008 Conference, 2008 Feb 28-Mar 2, Salt Lake City, , Cosyne. Salt Lake City. 121-12 (2008).
- Ball, P. Nature's patterns : a tapestry in three parts. , Oxford University Press. (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D. Bootstrapped learning of novel objects. J. Vis. 3, 413-422 (2003).
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M. Feature-based volume metamorphosis. SIGGRAPH. , 449-456 (1995).
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. Numerical geometry of non-rigid shapes. , Springer. (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. Pattern classification. , 2nd edn, Wiley. (2001).
- Bishop, C. M. Pattern recognition and machine learning. , Springer. (2006).
- Theodoridis, S., Koutroumbas, K. Pattern recognition. , 3rd edn, Academic Press. (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , 4th edn, W.H. Freeman and Co. (2011).
- Tuffery, S. Data mining and statistics for decision making. , Wiley. (2011).
- Crawley, M. J. Statistical Computing: An Introduction to Data Analysis using S-Plus. , Wiley. (2002).
- Venables, W. N., Ripley, B. D. Modern Applied Statistics with S. , Springer. (2003).
- Beier, T., Neely, S. Feature-based image metamorphosis. SIGGRAPH. 26, 35-42 (1992).
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. Warping and morphing of graphical objects. , Morgan Kaufmann Publishers. (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , IEEE Computer Society Press. (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. Computer graphics. , Nova Science Publishers. (2011).
- Lengyel, E. Mathematics for 3D game programming and computer graphics, third edition. , 3rd Ed, Cengage Learning. (2011).
- Gilbert, S. F. Developmental biology. , 9th edn, Sinauer Associates. (2010).
- Gilbert, S. F., Epel, D. Ecological developmental biology : integrating epigenetics, medicine, and evolution. , Sinauer Associates. (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E. Categorization of natural objects. Annual Review of Psychology. 32, 89-115 (1981).
- Futuyma, D. J. Evolution. , 2nd edn, Sinauer Associates. (2009).