Summary
Se describe una nueva metodología para la creación de naturalistas objetos 3-D y categorías de objetos con variaciones de características definidas con precisión. Utilizamos simulaciones de los procesos biológicos de la morfogénesis y la filogénesis de crear nuevos, naturalistas objetos virtuales en 3-D y las categorías de objetos que pueden ser representados como imágenes visuales u objetos táctiles.
Abstract
Para estudiar cuantitativamente la percepción de objetos, ya sea por la percepción de los sistemas biológicos o por las máquinas, se necesita para crear objetos y categorías de objetos con precisión definible, preferiblemente naturalista, propiedades 1. Además, los estudios sobre el aprendizaje perceptual, es útil para crear objetos nuevos y categorías de objetos (o clases de objetos) con tales propiedades 2.
Muchos métodos innovadores y útiles existen en la actualidad para la creación de nuevos objetos y categorías de objetos 3-6 (ver también las refs. 7,8). Sin embargo, en términos generales, los métodos existentes tienen tres grandes tipos de deficiencias.
En primer lugar, variaciones de forma son generalmente impuesta por el experimentador 5,9,10, y por lo tanto puede ser diferente de la variabilidad en categorías naturales, y optimizado para un algoritmo de reconocimiento particular. Sería deseable tener las variaciones surgen independientemente de la externally impuso restricciones.
En segundo lugar, los métodos existentes tienen dificultad para captar la complejidad forma de los objetos naturales 11-13. Si el objetivo es el estudio de la percepción del objeto natural, es deseable que los objetos y las categorías de objetos a ser naturalista, a fin de evitar posibles factores de confusión y casos especiales.
En tercer lugar, generalmente es difícil de medir cuantitativamente la información disponible en los estímulos creados por métodos convencionales. Sería deseable crear objetos y categorías de objetos donde la información disponible puede medirse con precisión y, en caso necesario, sistemáticamente manipulado (o 'sintonizado'). Esto permite formular las tareas de reconocimiento de objetos subyacentes en términos cuantitativos.
Aquí se describe un conjunto de algoritmos, o métodos, que cumplen los tres criterios anteriores. Morfogénesis virtual (VM) crea nuevas, naturalistas objetos virtuales en 3-D llamados «embriones digitales" porsimulando el proceso biológico de la embriogénesis 14. Filogénesis Virtual (VP) crea nuevas categorías, objeto naturalistas simulando el proceso evolutivo de la selección natural 9,12,13. Objetos y categorías de objetos creados por estas simulaciones puede ser manipulado por varios métodos de morphing para generar variaciones sistemáticas de características de forma 15,16. El VP y morphing métodos también se pueden aplicar, en principio, a nuevos objetos virtuales que no sean embriones digitales, o para versiones virtuales de los objetos del mundo real 9,13. Objetos virtuales creados de esta manera se puede representar como imágenes visuales usando un conjunto de herramientas gráficas convencionales, con manipulaciones deseadas de textura de la superficie, iluminación, tamaño, punto de vista y el fondo. Los objetos virtuales también se pueden 'impreso' como objetos táctiles que utilizan un sistema convencional de 3-D prototyper.
También se describen algunas implementaciones de estos algoritmos computacionales para ayudar a illustrar la utilidad potencial de los algoritmos. Es importante distinguir los algoritmos de sus implementaciones. Las implementaciones son demostraciones ofrecen sólo como una "prueba de principio" de los algoritmos subyacentes. Es importante señalar que, en general, una implementación de un algoritmo computacional a menudo tiene limitaciones que el propio algoritmo no tiene.
Juntos, estos métodos representan un conjunto de herramientas potentes y flexibles para estudiar el reconocimiento de objetos y el aprendizaje perceptual por los sistemas biológicos y computacionales por igual. Con las extensiones apropiadas, estos métodos también pueden ser útiles en el estudio de la morfogénesis y la filogénesis.
Protocol
1. Creación de naturalistas virtuales en 3-D usando objetos VM
- Para crear embriones digitales, utilice el Taller Digital Embryo (DEW, véase el cuadro 1). Cada ejecución se genera un único embrión 14, la forma de la que es único para un conjunto dado de valores (o "genotipo") utilizados para la ejecución dada (Figura 1). Las "células del embrión se representan como triángulos 14.
- Ejecutar el programa tantas veces como sea necesario para generar el número deseado de embriones.
- Si formas más complejas se desea, aumentar el número de ciclos de crecimiento, es decir, el número de veces que las células del embrión se dividen. Tenga en cuenta que esto también se ralentizará el programa. Si es necesario para crear objetos virtuales que no sean embriones digitales, utilizar comercialmente disponibles en 3-D herramientas de modelado de objetos virtuales u obtener de proveedores comerciales (Tabla 1).
- En general, es aconsejable guardar el objeto virtuals en un formato de archivo comúnmente utilizado, tal como OBJ, de manera que los objetos pueden ser fácilmente importados a un conjunto de herramientas de modelado comercial 3-D. Con este fin, el rocío escribe objetos en formato OBJ por defecto.
- Los estímulos visuales pueden ser generados usando uno o más embriones digitales utilizando un modelado en 3-D y entorno de reproducción (Tabla 1). Utilizar las operaciones estándar de gráficos, tales como la variación de la orientación, el tamaño, la iluminación, la textura superficial y de fondo para crear los estímulos deseados (ver Figura 2).
2. Crear categorías naturalistas objeto con VP
- Para generar categorías de objetos, generar descendientes (o "niños") del antepasado dado (o "padre") objeto utilizando una combinación deseada de los procesos en el paso 1.1 anterior (Figura 3) 9,10,12,13.
- Algunos métodos que se describen a continuación para crear variaciones suaves formas, como morphing o componentes principales (vea los pasos 3 y 4), el trabajo better si todos los objetos de entrada tienen el mismo número de células y, si hay uno-a-uno entre los vértices de los objetos. Para la creación de tales objetos, utilizar sólo aquellos procesos VM que no cambian el número de células y preservará la correspondencia uno-a-uno de los vértices entre los objetos (véase, por ejemplo, las generaciones G G 2 a 3 en la Figura 3). Por ejemplo, la división celular y la muerte celular programada altera el número de células, y hacer que sea mucho más difícil (aunque no imposible 17,18) para determinar una correspondencia uno a uno entre los vértices de un par dado de objetos.
Tenga en cuenta que los procesos que alteran el número de células en un objeto dado también alterar su complejidad de forma. En general, cuanto mayor es el número de células, mayor es la complejidad de la forma del objeto y su superficie lisa. - Si los objetos virtuales necesarios, que no sean embriones digitales se pueden utilizar como entradas a VP (Figura 4).
- Algunos métodos que se describen a continuación para crear variaciones suaves formas, como morphing o componentes principales (vea los pasos 3 y 4), el trabajo better si todos los objetos de entrada tienen el mismo número de células y, si hay uno-a-uno entre los vértices de los objetos. Para la creación de tales objetos, utilizar sólo aquellos procesos VM que no cambian el número de células y preservará la correspondencia uno-a-uno de los vértices entre los objetos (véase, por ejemplo, las generaciones G G 2 a 3 en la Figura 3). Por ejemplo, la división celular y la muerte celular programada altera el número de células, y hacer que sea mucho más difícil (aunque no imposible 17,18) para determinar una correspondencia uno a uno entre los vértices de un par dado de objetos.
- Los objetos dentro de una categoría dada puede ser más que se selecciona a fin de lograr una distribución dada de características 19. Por ejemplo, uno puede eliminar selectivamente de tamaño medio objetos de una categoría dada a fin de generar una distribución bimodal de tamaño del objeto.
- No hay ningún método único que sea universalmente óptima para la medición de la información de la forma disponible para todas las categorías, ni existe un único método que es óptima para clasificar todos los objetos 20-22. Así, el experimentador debe elegir los métodos basados en las categorías y objetivos computacionales a mano 20-22. Paso 4 describe un método comúnmente utilizado para la manipulación de diversos aspectos de la información de la forma disponible.
- La similitud entre un par determinado de categorías pueden ser medidos objetivamente utilizando métodos filogenéticos disponibles 23,24. Por ejemplo, la vertical (o "evolutivo") distancia entre un par dado de categorías, según se mide por cl jerárquicaustering métodos en el conjunto de herramientas estadístico R, es una medida objetiva de la similitud categoría 25,26.
3. Métodos adicionales de creación de variación de la forma: Digital Morphing
- Dado cualquier par de objetos de modo que cada vértice de un objeto corresponde exactamente a un vértice del otro objeto (. Es decir, los objetos con uno-a-uno entre los vértices), morphing es sencillo 17,18,27-29: En este caso, las variaciones leves (o 'transforma') entre los dos objetos son producidos por suavemente interpolando entre los vértices correspondientes y normales (Figura 5). Dependiendo del par de objetos seleccionados, morphing resultará en nuevas categorías o niños adicionales dentro de una categoría.
- Los objetos que se muestran en la figura 5 se crearon utilizando lineal morphing 27-29. Los objetos pueden ser transformado (o deformada) por una amplia gama de otras técnicas de deformación disponibles 17,18.
- Para crear una distribución deseada de formas transformadas, elegir los puntos de interpolación en consecuencia.
4. Métodos adicionales de creación de variación de la forma: Componentes Principales
- Con el fin de utilizar componentes principales para generar variaciones de forma, es necesario determinar primero las componentes principales 15. Los componentes principales son específicos para el conjunto dado de objetos que se utilizan para la determinación de los 26. Para obtener buenos resultados, utilizar por lo menos 30 objetos con uno-a-uno entre los vértices 26.
- Generar un objeto de media a partir de un conjunto deseado de objetos de entrada n, por separado promedio de las coordenadas y la normal de cada vértice a través de todos los objetos. Por lo tanto, la coordenada x de un k dado vértice de debe ser el promedio de las coordenadas x de k vértice de todos los n objetos, y así sucesivamente.
- Utilice la función de Matlab PRINCOMPpara determinar los componentes principales de los N objetos. Esto generará n-1 no-cero vectores propios, junto con la correspondiente n-1 valores propios 26.
- Para generar un nuevo objeto A j de un componente principal dado P i, p i multiplicar por el correspondiente valor propio λ i y j peso w deseado y añadir al objeto media:
A j = + w j λ i P i - Cada único j w generará un objeto único. Por suavemente variable w, uno puede crear variaciones suave, forma, a lo largo de un componente principal dado.
- Para crear variaciones de forma a lo largo de una dimensión de forma independiente, repita el paso 4.4 utilizando un componente principal diferente.
- Para crear una distribución deseada de formas a lo largo de un componente principal dado, utilizar la distribución deseada de w. </ Li>
- Para crear una red multi-dimensional de formas, utilice un conjunto de pesos para cada uno de varios componentes principales:

5. Creación de versiones hápticas de objetos 3-D
- 'Fuera de impresión "objetos 3-D usando un prototyper 3-D (o 3-D' impresora '). Si es necesario, ajustar el tamaño del objeto y alisar la superficie del objeto antes de imprimir.
6. Una aplicación Exemplar: Inferencia bayesiana de la categoría Imagen
- Una tarea importante en el procesamiento visual inferir la categoría a la que un objeto dado observado pertenece. Aunque el mecanismo exacto de esta inferencia es desconocida, hay evidencia tanto computacional y fisiológicos 9,12,13,30-32 que implica el uso de la información acerca de las características conocidas del objeto en la imagen dada para inferir la categoría del objeto. Aquí, vamos a Illustrate cómo este proceso inferencial puede trabajar en un marco bayesiano, y el número de embriones digital puede ser útil para la investigación en esta área.
- Para simplificar, vamos a suponer que la tarea de categorización es binaria e involucra K categoría distintiva de la categoría L (Figura 3). Sea C la variable categoría. Vamos a inferir que C = K o C = L en función de si la imagen observada I pertenece a la categoría K o L. Un enfoque típico para categorización implica:
- Cálculo de la probabilidad de que la categoría K es dada la información de la imagen, denotado p (C = K | I);
- Cálculo de la probabilidad de que la categoría L es dada la información de la imagen, denotado p (C = L | I); y
- Elegir la categoría con mayor probabilidad.
- A continuación, vamos a suponer por simplicidadque existe exactamente una función F binario. Esta característica puede ser o bien presente en la imagen (denominado F = 1) o ausente de la imagen (denominado F = 0). En este ejemplo se utilizará el «fragmento informativo" característica mostrada en la Figura 8. Fragmentos informativos fueron descritos por primera vez por Ullman y sus colegas 33. En el presente caso, se utilizará la plantilla de imagen se muestra en la Figura 8 como la función, y un valor umbral de 0,69. Para determinar si esta característica está presente en una imagen dada (por ejemplo, la imagen de la derecha en la fila G3 en la Figura 3), se utilizarán los siguientes pasos:
- Deslice esta plantilla sobre todas las posibles ubicaciones en la imagen y calcular, en cada localización, el valor absoluto de la correlación cruzada normalizada entre la plantilla y la sub-imagen subyacente.
- Seleccione la ubicación de la imagen con el valor más alto (0,60 en el caso presente).
- Si este valor es superior al umbral, la conclusiónque la característica está presente, de lo contrario, la conclusión de que está ausente. En nuestro caso, ya que la mayor correlación 0,60 está por debajo del umbral de 0,69, concluimos que la característica está ausente en esta imagen.
- La justificación del uso de tales características, y los mecanismos de selección de funciones y la determinación de sus umbrales están más allá del alcance de este informe, pero se describen en detalle en las referencias bibliográficas. 33, 30.
- En el marco de inferencia basado en características, se supone que toda la información de los extractos de observación de la imagen se incluye en el valor de esta característica, i. e, que p (C | I). = p (C | F).
Por lo tanto, la tarea se hace que la determinación del valor de F en la imagen dada (presente o ausente), la computación p (C = K | F) y p (C = L | F) para que el valor F, y la selección de la categoría con la mayor probabidad. - En el marco bayesiano,

Por lo tanto,
y

Tenga en cuenta que el denominador en las dos ecuaciones es la misma. Por lo tanto, para comparar p (C = K | F) y p (C = L | F), no es necesario calcular el denominador, sino que es suficiente para calcular las cantidadesp (C = K | F) α p (C = K) p (F | C = K)
y
p (C = L | F) α p (C = L) p (F | C = L)
ThESE a veces se llaman "probabilidades sin normalizar. El término p (C) es llamada "previa", y el término p (F | C) se denomina «riesgo».- Para simplificar, vamos a suponer un 'plano' antes: p (C = K) = p (C = L) = 0,5.
- La tarea consiste ahora en calcular p (F | C), la probabilidad de un valor determinado en función de una imagen de un C categoría dada.
- Vamos a utilizar las seis imágenes de la categoría L (Figura 3) como un ejemplo para calcular p (F = 1 | C = L), la probabilidad de que la característica está presente en una imagen de la categoría L.
- Para calcular p (F = 1 | C = L), en primer lugar tomar todas las imágenes de entrenamiento que pertenecen a L. De nuevo, estos se muestran en la Figura 3.
- Para cada imagen, determinar si el valor de característica es 1 (presente) O 0 (ausente), como se describe en (6.3.1) - (6.3.3). En nuestro caso, para los seis imágenes en la Figura 3, los valores son: [0, 0, 1, 0, 1, 0].
- Calcular la fracción de imágenes en las que el valor de característica es 1. En nuestro caso, es de 2/6 = 0,33.
- Por lo tanto, p (F = 1 | C = L) = 0,33. Tenga en cuenta que para obtener estimaciones precisas, se debe utilizar por lo menos 30 imágenes por clase.
- De una manera similar, se puede calcular que p (F = 0 | C = L) = 0,67, p (F = 1 | C = K) = 0,83, p (F = 0 | C = K) = 0,17.
- Dados estos valores, la inferencia puede ser realizada. Supongamos que se nos ha dado una nueva imagen (Figura 9), y la tarea es determinar su etiqueta de categoría. Esto se realiza como sigue:
- Determinamos si el F característica está presente en la imagen, como se describe en (6.3.1) - (6.3.3). En nuestro caso, el FEAtura está presente, por lo que F = 1.
- Utilizando las ecuaciones (1) y (2), y los valores calculados en (6.7.5) - (6.7.6), se puede calcular que p (C = K | F = 1) = 0,42 y p (C = L | F = 1) = 0,17.
- Teniendo en cuenta esta información, es razonable concluir que la imagen es de la categoría K, con una confianza relativamente baja.
- Podría ser interesante y útil para poner a prueba este enfoque en un sistema biológico (por ejemplo, psicofísicamente). En este caso, las predicciones de comportamiento podría hacerse y se compara con los resultados del cálculo, como los obtenidos en (6.8.2). Para hacer predicciones exactas, buenas estimaciones de p (F | C) son necesarios. Tales estimaciones, sin embargo, puede ser difícil de obtener para los objetos familiares. La razón es que un sujeto estimación de p (F | C) no es observable directamente, y es extremadamente difícil de calcular ya que el sujetoExposición previa 's de las imágenes naturales incontrolables y desconocidos. En contraste, si los embriones digitales se usan para los experimentos, entonces es posible controlar con precisión la que los embriones y las categorías de embriones el sujeto está expuesto al. Esto hace que sea fácil de calcular las cantidades de interés a partir de exactamente los mismos datos se expuestos al sujeto a. El hecho de que la aparición de embriones 'es naturalista es útil, ya que hace que sea probable que el sujeto está utilizando la estrategia de categorización mismo que con las categorías naturales.




Representative Results
VM puede ser utilizado para generar un suministro casi ilimitado de formas novedosas 3-D. Algunos embriones ejemplares digitales generadas utilizando el algoritmo de VM se muestran en el panel inferior de la Figura 1. Cada uno de estos 16 embriones fueron generados utilizando el programa "growEmbryos.exe 'en las herramientas embrión digital para Cygwin (ver Tabla 1) para el crecimiento 40 ciclos. Todos los parámetros de crecimiento se establecieron otras internamente por el programa. La mayoría de estos parámetros se mantuvieron constantes (es decir, idéntico de un embrión a la siguiente). A pocos parámetros como la ubicación y la fuerza de las fuentes de morfógeno, eran parámetros aleatorios establecidos internamente por el programa de forma independiente para cada corrida. Las variaciones de forma entre estos 16 embriones surgió únicamente como resultado de las variaciones de estos parámetros aleatorios.
Algunos ejemplos de textura de superficie 34,35 utilizando algunas texturas escogidas arbitrariamente se muestran en la Figura 2A. Escenas visuales de unacomplejidad rbitrary puede ser creado utilizando un comercialmente disponible modelado 3-D y entorno de reproducción, tal como se muestra en la Figura 2B.
"Árbol genealógico" Un representante generado por el uso de embriones VP digital se muestra en la figura 3. Árboles comparable, también pueden ser construidos usando otros objetos que los embriones digitales, como se muestra en la Figura 4. Tenga en cuenta que en cualquiera de los casos, los objetos que comparten un ancestro común rodeos constituyen una categoría, aunque el experimentador también puede elegir definir una categoría como cualquier otro conjunto de objetos. Vale la pena observar en la Figura 4 que nuestra implementación actual de la máquina virtual y algoritmos VP tiende a producir relativamente lisas, superficies curvas, en contraposición a los objetos irregulares o planas. También vale la pena señalar que esta es probablemente la limitación de nuestra implementación de estos algoritmos y no los propios algoritmos, ya que los procesos pueden producir biolological objetivosts con superficies planas y contornos irregulares (por ejemplo., rosa hoja).
Las figuras 5 y 6 ilustran los resultados típicos de dos métodos que se pueden utilizar además de o en lugar de, VP de la creación de variaciones de principio en la forma del objeto y categorías de objetos.
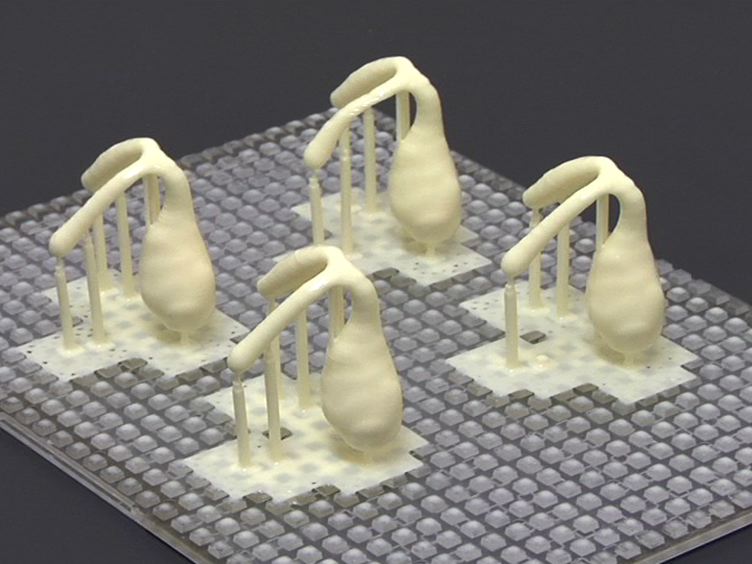
El panel superior de la Figura 7 ilustra representaciones visuales de dos embriones digitales, y el panel inferior de la Figura 7 ilustra las impresiones correspondientes generados por un comercialmente disponible 3-D prototyper.
Las figuras 8 y 9 ilustran los procedimientos descritos en la Sección 6 para el uso de fragmentos de imágenes para clasificar un objeto dado visual.

Figura 1. Morfogénesis virtual. 14. Embriones digitales puede ser generada mediante la simulación de una o más de algunos de los procesos clave de la embriogénesis biológica: morfógeno mediada por la división celular, el crecimiento celular, movimiento celular y la muerte celular programada 7,8,36,37. Cada ejecución se inicia con un icosaedro (que se muestra en el panel superior), y genera un embrión único, dependiendo de los ajustes de los parámetros de VM (o el "genotipo") de ese embrión. Así, los 16 embriones en el panel inferior tienen formas diferentes, porque todos tienen diferentes genotipos. Tenga en cuenta que más simples o más formas complejas se pueden generar según sea necesario (por ejemplo, para estimular óptimamente neuronas en un nivel dado de la jerarquía visual) mediante la manipulación del genotipo del embrión. Todos los procesos antes mencionados embryogenetic excepto la muerte celular programada se simularon en la generación de los embriones se muestran. Simulación de muerte celular programada es especialmenteútil para crear hendiduras orientadas (no mostrado).

Figura 2. Creación de estímulos visuales usando embriones digitales. Como cualquier objeto virtual en 3-D, los embriones digitales se pueden manipular para crear gráficamente escenas visuales de complejidad arbitraria utilizando cualquier estándar de 3-D de herramientas gráficas. Esta figura ilustra algunas manipulaciones comunes. (A) El mismo embrión digital es de textura con muchas texturas diferentes, y encendido de una fuente de luz invisible en la parte superior izquierda. (B) Una escena camuflado se crea redimensionar y reorientar el embrión digital y digitalmente la coloque en un contexto en el que estaba con textura. El embrión digital se puede encontrar en 'la vista' en el cuadrante inferior derecho. Para ejemplos adicionales de estímulos visuales CREATED uso de embriones digitales, ver refs. 9,10,12-14,38.

Figura 3. Creación de categorías digitales de embriones utilizando VP. El algoritmo VP emula la evolución biológica, en que en ambos casos, los objetos nuevos y categorías de objetos surgir como variaciones hereditarias acumularse selectivamente. En cada generación G i, los embriones seleccionados procrear, lo que lleva a la generación de G i +1. La progenie heredará las características de las formas de su padre, pero se acumulan variaciones de forma de los suyos (según lo determinado por las pequeñas variaciones en su genotipo) a medida que desarrollan. Esta figura muestra un "árbol genealógico" de tres generaciones de descendientes a partir de un único ancestro común, un icosaedro. Tenga en cuenta que, en este caso, que aumenta la complejidad de la forma de icosaedro geion G 1, pero no de G 1 en adelante. Esto es debido a aumento del número de células (es decir., La división celular), se dejó de la icosaedro en generación G 1, pero no de G 1 en adelante. En general, la división celular tiende a aumentar la complejidad de la forma, mientras que otros procesos de morfogénesis, tales como el movimiento celular y la forma de crecimiento de células cambio sin cambiar la complejidad global de la forma.

Figura 4. VP uso de objetos virtuales que no sean embriones digitales. Esta figura ayuda a ilustrar el principio general de que los objetos virtuales que no sean embriones digitales se pueden utilizar como entrada a VP. El algoritmo de VP en su forma actual puede funcionar en cualquier objeto virtual en 3-D, cuya superficie se compone únicamente de triángulos. Generación G 1 comprised de (de izquierda a derecha) una calabaza, diamante, máscara facial, la manzana, el rock y cactus. Tenga en cuenta que los objetos en la generación G 1 En esta cifra no tiene un antepasado común, porque el vicepresidente no lo requiere. Los objetos en G 2 y G 3 representan los descendientes de la roca en G 1. No hay divisiones celulares se permiten en cualquier generación, a fin de que todas las variaciones de la forma surgieron únicamente de los movimientos y / o el crecimiento de las células individuales del objeto dado.

Figura 5. Uso de morphing para crear variaciones suaves en forma. Morphing consiste en tomar dos objetos dados (extremo izquierdo y extremo derecho embrión en esta figura) y el cálculo de los objetos intermedios (interviniendo embriones) interpolando entre los vértices correspondientes de la designan dosd objetos. En el caso mostrado, todos los vértices se interpolaron con el mismo factor de escala, lo que resulta en un lineal de morphing. Sin embargo, también es posible mutar los objetos de forma no lineal (no mostrado). Morphing es computacionalmente sencillo cuando no hay una correspondencia exacta de uno-a-uno entre los vértices de dos objetos, como en el caso mostrado. Sin embargo es posible, en principio, a morph entre dos propuestos objetos virtuales, independientemente de si sus vértices corresponden exactamente, aunque no existe un método único de principios para hacerlo 17,18.

Figura 6. El uso de componentes principales para crear variaciones suaves en forma. (A) embrión Media. Este embrión representa el promedio aritmético de 400 embriones (200 de cada categoría K y L enLa Figura 3). Los componentes principales se calcularon como se describe en el paso 4,3. Tenga en cuenta que los componentes principales representan independientes entre sí, dimensiones de forma abstractos de los 400 embriones (no se muestra) 25,26. 400 embriones producir 399 componentes no nulas 25,26 principales, que en conjunto representan toda la varianza, o la información de forma colectiva disponible en los embriones. Por convención, los componentes principales están dispuestos en el orden decreciente de sus valores propios, o la proporción de la varianza global explican 25,26. En este caso, los dos primeros componentes principales, respectivamente, el 73% y el 19% de la información de la forma disponible en los 400 embriones. (B) Los embriones que representan diferentes pesos (o más precisamente, autovalores ponderada) de Componentes Principales 1. Los pesos varían desde +2 (a la izquierda) a -2 (a la derecha) en pasos iguales de -0,2. (C) Los embriones que representan diferentes pesos de Compon Principalent 2. El peso también varía de +2 (a la izquierda) a -2 (a la derecha) en pasos iguales de -0,2. Tenga en cuenta que la manipulación de componentes principales no exclusivamente manipular cualquier parte dada del cuerpo específico del embrión (p. ej., Las alas del embrión en el caso mostrado). Sin embargo, si es necesario, las partes del cuerpo de virtual en 3-D objetos pueden ser manipulados de cualquier forma arbitraria definida por el usuario utilizando la mayoría de los disponibles comercialmente en 3-D entornos de modelado (no mostrado).

Figura 7. Creación de objetos táctiles. Virtual objetos 3-D se puede "imprimir" como objetos táctiles que utilizan un estándar, disponible en el mercado en 3-D 'impresora' o prototyper. Esta figura muestra embriones digitales representan como objetos visuales (fila superior), o como los objetos táctiles correspondientes (fila inferior). Los objetos hápticos shown en esta figura se imprimieron a ser de alrededor de 6 cm de ancho (barra de escala = 1 cm), aunque los objetos se pueden imprimir en tamaños mucho más pequeños o más grandes.

Figura 8. Una plantilla para un fragmento de ejemplo informativo. En este ejemplo, la plantilla tiene un umbral de 0,69 asociada con él.

Figura 9. Una nueva imagen para el que la categoría objeto no se conoce y necesita ser determinada.
Discussion
Utilidad de la VM y VP de Investigación en Ciencia Cognitiva
Anteriormente hemos descrito la utilidad de VM y VP en detalle l9 ,10,12-14. Brevemente, VM, especialmente la metodología embrión digital, es útil porque proporciona un método basado en principios y flexible para crear novela, pero naturalistas objetos 3-D 14. Del mismo modo, VP proporciona un método basado en principios de la creación de categorías naturalistas 9,10,12,13. Vale la pena señalar que las categorías de objetos generados por comparten características con muchas VP categorías de objetos en la naturaleza, incluyendo el hecho de que las categorías tienden a ser de naturaleza jerárquica, y las variaciones de características dentro ya través de categorías surgir independientemente del experimentador y los algoritmos de clasificación ellos 39.
Limitaciones actuales y direcciones futuras
Tres actuales limitaciones de nuestro protocolo y las instrucciones para el trabajo futuro, sugierenson particularmente notables: en primer lugar, tanto VM y VP simular procesos biológicos. Aunque se muestra que no biológicos objetos virtuales pueden ser utilizados como sustratos para estos procesos, los procesos subyacentes siguen siendo biológicamente motivados. Sin embargo, los objetos naturales - biológicos y no biológicos por igual - someterse a cambios en la forma, debido a la no-biológicos fuerzas. Por ejemplo, las rocas pueden cambiar de forma debido a procesos geológicos como la erosión o sedimentación. Nuevas categorías de roca puede surgir de otros procesos geológicos tales. Debería ser relativamente fácil de incorporar estos procesos en el repertorio de los algoritmos disponibles cambian de forma.
La segunda limitación importante de nuestro protocolo es que su repertorio actual de cambios de forma dinámica es bastante limitado. Es deseable incorporar una mayor variedad de cambios en la forma, tales como el movimiento biológico, o movimiento debido a fuerzas externas, como el viento, el agua o la gravedad. Esperamos que duraranl ser relativamente fácil de hacer valer los algoritmos informáticos conocidos de animación para implementar dichos cambios de forma dinámica.
La tercera limitación importante de nuestro protocolo es que VM actualmente no incluye muchos otros conocidos procesos morfogenéticos incluyendo, en particular, la gastrulación 36. También falla en incorporar algunas limitaciones conocidas, tales como el hecho de que la morfogénesis en plantas está mediada completamente por el crecimiento, con el movimiento de células poco o ningún posible, debido a las paredes celulares 36. De manera similar, VP no se incluyen otros procesos filogenéticos conocidos como la deriva genética 40. Para abordar estas limitaciones sería de gran ayuda facilitar el uso de nuestro protocolo en las simulaciones de desarrollo, ecológicos y evolutivos.
Disclosures
No hay conflictos de interés declarado.
Acknowledgments
Este trabajo fue apoyado en parte por el Ejército de los EE.UU. Laboratorio de Investigación del Ejército de los EE.UU. y la Oficina de Investigación y W911NF1110105 subvención NSF subvención IOS-1147097to Hegde Jay. También se prestó apoyo de una subvención piloto para Jay Hegde del Instituto Visión Descubrimiento de la Georgia Health Sciences University. Daniel Kersten fue apoyado por becas ONR N00014-05-1-0124 y NIH R01 EY015261 y en parte por WCU (World Class University) programa financiado por el Ministerio de Educación, Ciencia y Tecnología a través de la Fundación Nacional de Investigación de Corea (R31-10008 ). Karin Hauffen fue apoyada por el Programa de Investigación de Pregrado Aprendizaje (URAP) del Ejército de los EE.UU..
Materials
| Name | Company | Catalog Number | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. | |||
References
- Palmeri, T. J., Gauthier, I. Visual object understanding. Nat. Rev. Neurosci. 5, 291-303 (2004).
- Seger, C. A., Miller, E. K. Category learning in the brain. Annu. Rev. Neurosci. 33, 203-219 (2010).
- Perceptual Learning. Fahle, M., Poggio, T. , MIT Press. (2002).
- Ashby, F. G., Maddox, W. T. Human category learning. Annu. Rev. Psychol. 56, 149-178 (2005).
- Gauthier, I., Tarr, M. J. Becoming a "Greeble" expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Fragment-based learning of visual categories. Bart, E., Hegdé, J., Kersten, D. Cosyne 2008 Conference, 2008 Feb 28-Mar 2, Salt Lake City, , Cosyne. Salt Lake City. 121-12 (2008).
- Ball, P. Nature's patterns : a tapestry in three parts. , Oxford University Press. (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D. Bootstrapped learning of novel objects. J. Vis. 3, 413-422 (2003).
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M. Feature-based volume metamorphosis. SIGGRAPH. , 449-456 (1995).
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. Numerical geometry of non-rigid shapes. , Springer. (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. Pattern classification. , 2nd edn, Wiley. (2001).
- Bishop, C. M. Pattern recognition and machine learning. , Springer. (2006).
- Theodoridis, S., Koutroumbas, K. Pattern recognition. , 3rd edn, Academic Press. (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , 4th edn, W.H. Freeman and Co. (2011).
- Tuffery, S. Data mining and statistics for decision making. , Wiley. (2011).
- Crawley, M. J. Statistical Computing: An Introduction to Data Analysis using S-Plus. , Wiley. (2002).
- Venables, W. N., Ripley, B. D. Modern Applied Statistics with S. , Springer. (2003).
- Beier, T., Neely, S. Feature-based image metamorphosis. SIGGRAPH. 26, 35-42 (1992).
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. Warping and morphing of graphical objects. , Morgan Kaufmann Publishers. (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , IEEE Computer Society Press. (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. Computer graphics. , Nova Science Publishers. (2011).
- Lengyel, E. Mathematics for 3D game programming and computer graphics, third edition. , 3rd Ed, Cengage Learning. (2011).
- Gilbert, S. F. Developmental biology. , 9th edn, Sinauer Associates. (2010).
- Gilbert, S. F., Epel, D. Ecological developmental biology : integrating epigenetics, medicine, and evolution. , Sinauer Associates. (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E. Categorization of natural objects. Annual Review of Psychology. 32, 89-115 (1981).
- Futuyma, D. J. Evolution. , 2nd edn, Sinauer Associates. (2009).