

Summary
Heri beskrives en robot tilgang til high-throughput krystallisation af membranproteiner i lipidiske mesofaser til anvendelse i strukturbestemmelse ved hjælp af makromolekylære røntgenkrystallografi. Tre robotter kan håndtere den viskose og klæbende protein-ladede mesofase integreret med fremgangsmåden introduceres.
Abstract
Struktur-funktionsundersøgelser af membranproteiner stor fordel at have tilgængelige høj opløsning 3-D strukturer af den type, der leveres gennem makromolekylær røntgenkrystallografi (MX). Et væsentligt element i MX er en stabil forsyning af ideelt diffraktions-kvalitet krystaller. Den i meso eller lipidiske kubiske fase (LCP) fremgangsmåde til krystallisering membranproteiner er en af flere metoder til rådighed til krystallisation af membranproteiner. Den gør brug af en bikontinuert mesofase til at dyrke krystaller. Som en metode, har det haft nogle spektakulære succeser sent og har tiltrukket sig megen opmærksomhed med mange forskergrupper nu interesseret i at bruge det. En af de udfordringer, der er forbundet med den metode er, at hosting mesofase er ekstremt tyktflydende og klæbrig, minder om en tyk tandpasta. Således dispensering det manuelt på en reproducerbar måde i små mængder til udkrystallisering brønde kræver dygtighed, tålmodighed og en rolig hånd. En protokol til at gøre just, der blev udviklet i membranen Strukturel & Funktionel Biologi (MS & FB) Gruppe 1-3. Jove video artikler, som beskriver den metode er tilgængelige 1,4.
Den manuelle fremgangsmåde for at oprette en meso forsøg har klare fordele med speciale applikationer, såsom krystal optimering og derivatisering. Det betyder dog lider af at være en lille produktion metode. Her viser vi en protokol til udførelse i meso krystallisering forsøg robot. En robot giver fordelene ved hastighed og nøjagtighed, præcision, miniaturisering og være i stand til at arbejde kontinuerligt i længere perioder under hvilke kan anses for fjendtlige tilstande, såsom i mørke, i en reducerende atmosfære eller ved lave eller høje temperaturer. En i meso robot, når de anvendes korrekt, kan forbedre produktiviteten af membranprotein struktur og funktion forskning ved at lette krystallisation som er en af de langsomme trin isamlede strukturbestemmelse pipeline.
I denne video artiklen udviser vi anvendelsen af tre kommercielt tilgængelige robotter, der kan dispensere den viskøse og klæbende mesofase integreret i meso crystallogenesis. Den første robot blev udviklet i MS & FB Group 5,6. De andre to har for nylig blevet tilgængelige og er medtaget her for fuldstændighedens skyld.
En oversigt af protokollen i artiklen er vist i fig. 1. Alle manipulationer blev udført ved stuetemperatur (~ 20 ° C) under omgivelsesbetingelser.
Protocol
1. Klargøring af Krystallisation Plate
Oprettelse at gøre en krystallisation forsøg robot begynder med forberedelsen af bundplade af glasset sandwich krystallisation plade (figur 2), beskrevet i detaljer i referenceeksempel 2. The bundplade skal først silaniseres og det perforerede dobbelt-stick spacer, der skaber brøndene, skal anvendes på pladen. De materialer og forsyninger, der er nødvendige for denne er inddelt under Materialer.
- Placer pladen på et stykke køkkenrulle, anvende et par dråber silanizing løsning og fordeler det jævnt over pladens overflade med en papirserviet.
- Fjerne overskydende silanizing opløsning ved neddypning af pladen i et bægerglas med vand.
- Tag pladen ud af bægeret, placere den på et tørt køkkenrulle, silaniseret side op, og tør sin eksponerede overflade ved at tørre let med en papirserviet.
- Skrælle beskyttelsesdækslet på den perforerede, dobbelt-stick spacerog anvende afstandsstykket, klæbrige side nedad, til det tørre, silaniserede overflade af glaspladen. Vær sikker på, at afstandsorganet er placeret korrekt på bundplade, med det øverste venstre hjørne, og de to tilstødende sider af afstandsstykket og pladen, sammenfaldende.
- Bruge en rulle eller Brayer at flade ud afstandsstykket på basen-plade og for at skabe en stram tætning mellem dem.
Formonterede plader er kommercielt tilgængelige (HR3-151, Hampton Research, MD11-55-100, molekylære dimensioner og LCP96T-UVP70U, Swissci). Af omkostningsmæssige årsager foretrækker vi at samle vores egne plader ifølge protokollen ovenfor.
2. I Meso Robot 1
Den første i meso robot skal påvises i denne video artikel er den i dag anvendes i MS & FB Group (Figur 3). Detaljerede oplysninger om robotten kan findes under Materialer og i afsnittet Reference 5. Materialerne og equipment der kræves for at oprette en krystallisation retssag ved hjælp af robotten er inddelt under Materialer.
- Placer base-plade med spacer fremstillet i afsnit 1 på dækket af robotten. Det har sin egen platform markeret med brøndpositioner, hvis formål er bundplade tilpasning. Pladen bør mærkes med henblik på identifikation.
- Fastgør 96 brønde fældningsmiddel blok i sin egen platform på dækket af robotten siden af krystallisation pladen.
- Åbne blokken forsigtigt ved at trække off the plastic tætsluttende kapsel.
- Tænd befugteren og lede strømmen af fugtig luft over og på tværs af bundplade på dækket af robotten. Befugteren har vist sig at reducere fordampning af fældningsmiddel opløsning og at forbedre reproducerbarheden over krystallisation pladen 5. Den kan tændes før opsætning at pre-fugte området, når den relative luftfugtighed er lav, eller på anden måde, lige før afgivelse af mesofase påbegyndes.
- Initialisere robotten i overensstemmelse med producentens anvisninger. Instrument specifikke instrukser vil ikke blive beskrevet her i detaljer, fordi præcise procedurer vil ændre sig over tid. Det væsentlige, hvad der sker under formatering, at mesofase dispensering arm på robotten er forsynet med referencepositioner i tre ortogonale retninger X, Y og Z.
- Fastgør protein-laden mesofase i en Hamilton-sprøjte, komplet med dispenseringsnålen, at Arm 1 af robotten (figur 3). Detaljerede oplysninger om hvordan man forbereder mesofase og hvordan du lægger det ind i sprøjten, er blevet beskrevet i Referencer 3,7-10.
- Fjern den øverste beskyttelsesdækslet fra spacer på krystallisering base-plade og juster brøndene på pladen med referencemærker på base-plade platform. Bemærk, med henblik på videoen, blev det beskyttende dæksel efterlades på plads for at hjælpe Viewer under justeringsprocessen trin.
- Juster nålespidsen af portioneringsledningen Syringe med bunden af det øverste og i det venstre hjørne af krystallisationen plade (Well A1). Dette gøres ved øjet justere højden eller Z-koordinater til afgivelse arm, mens man ser, hvor tæt nålens spids kommer til bunden af brønden. At spidsen blot rører bunden af brønden kan bedømmes ved at flytte pladen fra side til side på platformen, mens en anelse justering af højden af dispenseringssystemet armen.
- Træder i computeren Z-koordinat for afgivelse arm, hvor spidsen er i kontakt med pladen. Dispensering er programmeret til at finde sted med nålespidsen 80 mikrometer fra denne reference Z-position, der svarer til overfladen af basen-pladen.
- Stilling ved øjet spidsen af nålen i centrum for Well A1. Opbevares i den kontrollerende computer referencen X, Y koordinat dispenseringsområdet arm, hvor spidsen er centreret. Dette koordinatsystem anvendes til at definere midten af de resterende brønde på pladen.
- Prime sprøjten ved hjælp af en passende kommando på robotten computer for at sikre, at frisk mesofase fylder dispenseringsnålen, og at de første og de efterfølgende brønde modtager deres fulde komplement af mesofase. Tør ekstruderet mesofase på nålespidsen med en serviet.
- Start Run Robot (X-AP) program til at indlede en runde af rødmen trin, hvor de fældningsmiddel dispensering tips om Arm 2 af robotten bliver vasket og er parat til at opsuge løsninger fra fældningsmiddel blok.
- Aktivere dispensere funktionen på robotten til at iværksætte den sekventielle fyldning af brøndene med protein-laden mesofase (normalt 50 nl) først, en søjle af otte brønde i en tid, efterfulgt af fældningsmiddel opløsninger (sædvanligvis 800 nl). Mellem lastning kolonner, fugtet de mesofase dispensering arm vender tilbage til en parkeringsposition, hvor den ende af kanylen placeres i en svamp for at forhindre mesofase ved spidsen i at tørre ud. Fremgangsmåden ifølge dispensering mesofase og præcipitant gentages11 gange hen over pladen, indtil pladen er fyldt. Lastningen af en 96-brønds plade med mesofase-og fældningsmidler tager 5 min at fuldføre.
- Så snart pladen er fyldt, og de robotarmene vendt tilbage til deres park positioner, fjern pladen fra dækket af robotten og placere den på en flad solid overflade.
- Umiddelbart forsegle skiltet med en cover-glas for at minimere tidsafhængige ændringer i såvel komposition. Det er vigtigt at sikre, at alle 96 brønde er fuldt ud omfattet, at dækslet-glas er rettet ind firkant med bundplade og at ingen af dækslet-glass strækker sig ud over fodaftrykket af bunden-pladen. En valse eller Brayer anvendes til at skabe en tæt og ensartet forsegling mellem låget glas og afstandsstykket.
- Undersøg tallerkenen for at være sikker opstillingen gik som det skulle. Hvad man er på udkig efter, er en 'spejlæg på en pande' udseende i hver brønd. Blommen af spejlæg svarer til mesofase. Det hvide af ægget er den fældningsmiddel solutipå og kanten af gryden er omkredsen af krystallisationen godt. Ideelt set tre er koncentriske.
- Pladen anbringes i en temperatur-styret anlæg til krystalvækst.
- Hvis der ikke er flere plader er at blive oprettet, skal du fjerne fældningsmiddel blok fra dækket af robotten, der skal lukkes tæt og lægge den tilbage i opbevaring.
- Fjern sprøjten indeholder mesofase fra dispenserens arm af robotten, demontere det, og vaske sine dele, herunder dispenseringskanylen og ferrule, forsigtigt med methanol og tør som forberedelse til næste brug.
3. I Meso Robot 2. Mosquito LCP
Mosquito LCP robot (figur 4) indeholder et lignende mesofase dispenser til den anvendt af Robot 1. I modsætning til Robot 1, doserer det fældningsmiddel ved hjælp af engangsspidser. Programmeringssoftware bruges til at indstille instrument til at arbejde med specifikke krystallisationsegenskaber plader og precipitant blokke, og at dispensere brugerdefinerede mængder af mesofase og fældningsmiddel i en bestemt rækkefølge. Sådanne detaljer er tilvejebragt af producenten, og vil ikke blive beskrevet her.
- Udarbejde en Hamilton-sprøjte, komplet med nål og fyldt med protein-laden mesofase, som beskrevet ovenfor under Robot 1 og i Jove artikel 1712 1.
- Fastspænde sprøjten i position på afgivelse arm af robotten.
- Brug bordmonteret lasersensor at etablere X og Y koordinaterne nålen på uddelingsbeholderen sprøjten. Dette er et vigtigt skridt for at sikre, at mesofase dispenseres nøjagtigt i midten af hver brønd på pladen.
- Med et tryk på en knap på kontrolpanelet, sprøjten prime at udvise mesofase fra nålen. Fjern ekstruderet mesofase fra nålespidsen med et væv som forberedelse til brug af robotten at indlæse brønde.
- Før du placerer krystallisationen plade på dækket af robotten fugtigda overfladen af platformen med et par dråber vand for at hjælpe med at holde pladen på plads ved kapillarvirkning.
- Fjern beskyttelseshætten fra afstandsstykket på glas-bundpladen og placere den på sin platform fast for at sikre god vedhæftning. Anvend de tre referencemærker på platformen at bringe 3 hjørne brønde derved sikrer korrekt placering af brøndene på pladen i forhold til afgivelse af nålespidsen. Instrumentet er nu påbudt at indtaste en udleveringscyklus.
- Cyklussen starter med et andet priming trin, hvor mesofase dispenseres på en lille glasplade umiddelbart før man går videre til at indlæse brønde med frisk mesofase. Robotten først indlæses med mesofase en lodret søjle af otte brønde på pladen og bruger derefter engangsspidser at dispensere fældningsmiddel opløsning oven på mesofase bolus. Processen gentages 11 gange langs længden af pladen, indtil alle brønde er fyldte. Hele processen tager omkring 5 min at fuldføre.
- Fjernden fyldte plade fra platformen af robotten og forsegle det med en cover-glas, som beskrevet ovenfor under Robot 1.
- Pladen, mærkes, i et temperaturstyret miljø for krystalvækst.
4. I Meso Robot 3. Gryphon LCP
Gryphon LCP robot (figur 5) indeholder et lignende mesofase dispenseringssystem, der er beskrevet ovenfor for robotter 1 og 2.. Hvad adskiller den fra de andre to er, at alle 96 fældningsmiddel løsninger dispenseres samtidigt.
- Forbered protein-laden mesofase og indlæse den i udleveringen sprøjte, som beskrevet ovenfor, under Robots 1 og 2, og i Jove artikel 1712 1.
- Fastspænde sprøjten i position på afgivelse arm af robotten.
- Anbring fældningsmiddel opløsning blokken og krystallisation plade på dækket af robotten.
- Indlæse 96-spids head med fældningsmiddel løsninger. Et brugerdefineret forsinkelsestid er tilvejebragt for at lette opsugning viskøse præcipitanter.
- Beherske instrumentet om at indtaste en udleveringscyklus. Cyklussen begynder med mesofase, der dispenseres sekventielt ind i de 96 brønde i en proces der tager omkring 1 min at fuldføre. 96-spids hoved så afgiver alle 96 fældningsmiddel opløsninger på en gang oven på mesofase boli ved krystallisationen brønde. Hele pladen indlæsningsprocessen er færdig i 2 min.
- Fjern den fyldte plade fra platformen af robotten og forsegle det med en cover-glas, som beskrevet ovenfor under Robot 1.
- Pladen, mærkes, i et temperaturstyret miljø for krystalvækst.
5. Repræsentative resultater
Formålet med denne video artikel er at vise, hvordan man opsætter automatisk krystallisering forsøg med en tyktflydende, membranprotein-laden mesofase i glas sandwich 96 brønde krystallisation plader. Der lægges vægt på automatisering ved brug af specialiserede robotter, der kræver minimal manuel indgriben. Reproducerbarhed og præcision med hensyn til mængden af mesofase og fældningsmiddel dispenseret og placeringen af både inden i brønden, forventes, når en robot anvendes. Disse er vigtige ud fra et hensyn til effektiv screening af betingelser, der understøtter crystallogenesis. De er også afgørende for det næste trin i analysen rørledningen, som er at vurdere krystalvækst ofte gjort med imaging udstyr. Drop eller bolus placering er nøglen til billedbehandling processen, og uregelmæssig og forkert placering af bolus i brønden normalt kræver brugerens indgriben for at korrigere for og tager tid. Med henblik på illustration er eksempler på passende og upassende loaded plader vist i figur 6..
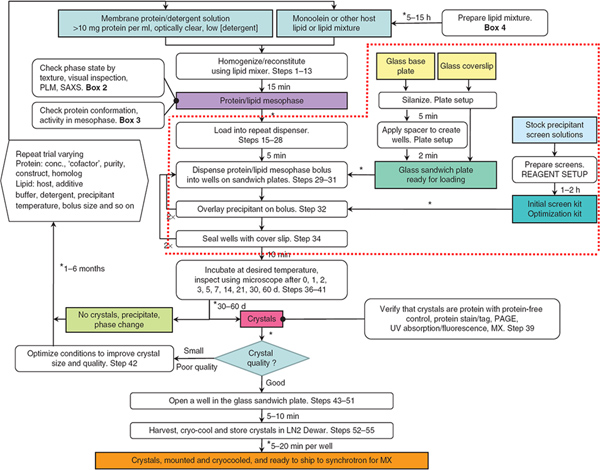
Fig. 1. Rutediagrammet sammenfatter trinene, der er involveret i produktion, høst og cryo-køling af i meso-dyrket membranprotein-krystaller. Steps omgivet af den stiplede røde linie er i fokus i denne Jové artikel. Robotter blev anvendt til at dispensere mesofase og fældningsmiddel opløsninger i trin 29-32. Fra Reference 3. Klik her for at se større figur .

Figur 2. En fuldt lastet og forseglet 96-brønds glas sandwich krystallisation plade. Hver brønd indeholder 50 nl kubisk fase og 1 pi præcipitant opløsning. For klarheds skyld er den kubiske fase er farvet med Sudan Red og fældningsmiddel opløsningen omfatter methylenblåt. Fra reference 5.
_upload/4000/4000fig3.jpg "alt =" Figur 3 "/>
Fig. 3. Den i meso robot (Robot 1). Robotten har to arme. Armen 1 dispenserer det protein-ladede lipid mesofase. Arm 2 dispenserer præcipitant løsninger. Under fyldning, forbliver 96-brøndspladen fastgjort på plads på dækket af robotten, der selv er stationær. De to arme bevæger sig til at levere mesofase og fældningsmiddel løsninger. Fra Reference 3.

Figur 4. Mosquito LCP robot (Robot 2). I modsætning til Robot 1, dækket af Mosquito LCP, hvorpå sidder på plade med 96 brønde og fældningsmiddel opløsning blok, bevæger sig vandret under fyldningen.

Figur 5. Den Gryphon LCP robot (Robot 3). Under enoprette, lipid kubiske fase dispenser bevæger at levere protein-laden mesofase på plade med 96 brønde. Dækket oversætter derefter horisontalt at anbringe pladen under fældningsmiddel opløsning spids hoved. Alle 96 fældningsmiddel opløsninger dispenseres simultant. Billede stammer fra fabrikanten ( http://www.artrobbins.com/ ) og mærket.

Figur 6. En fuldt lastet og forseglet 96-brønds glas sandwich-pladekomponent (A) og brønde passende (B) og forkert (C, D) fyldt ved anvendelse af i meso robotten (Robot 1). Stregkodeetiketten på pladen i A anvendes til at spore pladen i pladen inkubator / billeddannelsesindretning. I paneler BD, fældningsmiddel opløsning og mesofase er mærket P og M, hhv. Den forventede 'spejlæg på en pande'udseende af brønden i B er karakteristisk for et korrekt indlæst og forsegles godt. I C er fældningsmiddel blevet dispenseret i brønden forkert i en excentrisk position og er kommet i kontakt med afstandsstykket. I C, forekommer det også at mængden af mesofase er mindre end det burde være. Et eksempel på ufuldstændig belastning med fældningsmiddel opløsning er vist i D. For skala, diameteren af alle brønde er 6 mm.
Discussion
I denne video artikel har vi vist, hvordan man bruger en robot til automatisk oprettet i meso krystallisering forsøg i 96-brønds glas sandwich-plader ved hjælp af en protein-laden lipide mesofase. Robotterne anvendt i dette arbejde var specielt konstrueret til at omfatte en fortrængningspumpe glassprøjte til nøjagtig og reproducerbar afgivelse af nanoliter volumener af den viskose og klæbrige mesofase, som oprindeligt beskrevet 7.
Nøjagtighed og præcision er vigtige elementer i en robot. Men disse karakteristika er kun så god som den grad, og regelmæssighed, som robot resultater vurderes og kalibrering udføres. Det siger sig selv, at udførelsen af robotten bør evalueres, mens de enkelte plader er ved at blive oprettet. Det er ikke rimeligt at antage, at robotten vil fungere fejlfrit og overlade robotten til at køre uden opsyn. Den opmærksomme og opmærksomme operatør bør være i en position at bemærke med en lyd eller et udseende, når noget ikke fungerer korrekt, og at rette med det samme. Derudover skal hver plade nøje inspiceret med det blotte øje for ensartet og indholdet, så snart pladen forsegles, og før det lægges væk til krystallisation forsøg. Dette bør kun kræve et par sekunder til at udføre og kan gøres mens den næste plade bliver indlæst. Bemærke, for eksempel, kan denne særlige brønde ikke er korrekt udfyldt understrege, at en vis fældningsmiddel dispensering tip er funktionsfejl. Skulle levering af mesofase ses at være uregelmæssig, vil den relevante vare med fejl skal rettes med det samme. Ved at bemærke disse spørgsmål og foretage de relevante justeringer under opsætningen vil spare tid og materialer, herunder værdifuld lipid og membranprotein. Hvis en billeddanner bruges til at spore krystalvækst, kan nøjagtighed og præcision også overvåges under billedbehandling. For eksempel problemer systematisk med drop eller bolusbeliggenhed ved billeddanneren tyder på, at der er noget galt, og at korrigerende handling eller andet sted opstrøms i protokollen er nødvendig.
Af hensyn til pålidelig ydeevne derfor robotten skal kalibreres med jævne mellemrum og efter behov. Kalibreringer bør omfatte mængde fældningsmiddel og mesofase leveres, samt bolus og fældningsmiddel placering i brønden. Naturligvis bør så vidt muligt kalibrering gøres ved hjælp af volumener og materialer svarende til dem, der vil blive anvendt i forsøg udført i den periode, som kvalitetskontrollen øvelse.
Lige så vigtigt som kalibrering så også er at have på lager et tilstrækkeligt udbud af robot reservedele og tilbehør. Katastrofale og uventede nederlag, blokeringer og nedbrud kan og vil forekomme. I et sådant tilfælde, der foreligger en udskiftning præcipitant levering tip for eksempel, betyder måske, at en meget værdifuld membranprotein præparat anvendes som det skal, oger ikke spildt.
Nogle af fordelene ved en robot nævnes, at det vil fungere væsentlige kontinuerligt, og at det ikke lider af eller "klager over" træthed. En robot kan også anvendes under betingelser, der ikke betragtes human-friendly, såsom i mørke, under kontrollerede lys-og miljøforhold, og ved ekstreme temperaturer. Robotterne demonstreret i denne artikel er alle brugte under omgivelsesbetingelser ved ~ 20 ° C. Men der er proteiner og projekter, der kræver ikke-omgivelsestemperaturer, kontrollerede lys 11,12 og en oxiderende eller reducerende miljø 13. Alle disse kan blive taget hensyn til, med relativ lethed, når en krystallisering robot anvendes.
I et tidligere Jové video artikel, vi viste, hvordan krystallisering forsøg ved i meso metoden er sat op manuelt 1. Den mindste mængde mesofase der kan dispenseres pålideligt ved hånden er begrænset by den visuelle skarphed og støt håndethed for den person, opsætning af forsøg. Det er vores erfaring, er mængder af mesofase så lavt som 100 nl let håndteres. Vi kender en lab, hvor standard volumen dispenseres manuelt er omkring 40 nl. Imidlertid væsentligt mindre volumener er muligt ved hjælp af en robot. Separat, har vi vist, mesofase mængder så lave som 550 picoliters kan afgives robotically 14. Fra dette arbejde, det var tydeligt, at yderligere miniaturisering af robot er mulig som, hvis de gennemføres, vil føre til en stor reduktion i mængden af værdifulde membranprotein nødvendig for at gennemføre en krystallisering retssag.
I denne video artiklen blev tre kommercielt tilgængelige robotter benyttes til at påvise high-throughput membranprotein krystallisation med lipidiske mesofaser. Den første af disse blev udviklet i MS & FB Group baseret på vores erfaringer oprettelse forsøg manuelt, som beskrevet i Jove 1712 1. Dette er instrusomerdeltagerioverenskomsten vi har mest kendskab til og størstedelen af den nuværende artikel er helliget til at udnytte. De to andre robotter var på demonstration i MS & FB Group på det tidspunkt, artiklen blev skrevet, og den relevante optagelser er medtaget her af hensyn til fuldstændighed. Alle tre robotter bruger meget ens mesofase doseringssystem, det vigtigste element, der er en positiv forskydning glassprøjte 5,7. De adskiller sig mest markant med hensyn til præcipitant levering. Robotter 1 og 2 kan dispensere fældningsmiddel samtidigt i 8 brønde, en enkelt søjle på en krystallisation plade ad gangen. I modsætning hertil doserer Robot 3 alle 96 fældningsmiddel løsninger i en enkelt handling. Robot 2 er det eneste instrument med engangs præcipitant dispensering tips. Der er fordele og ulemper forbundet med de forskellige instrumenter, der afhænger af den særlige anvendelse, og disse vil ikke blive uddybet her. Det er nok at sige, at alle tre arbejde og har produceret krystaller af migmbrane proteiner ved den i meso metoden.
De næste trin i den overordnede proces for struktur bestemmelse ved makromolekylær krystallografi er til høst og til cryo-cool krystaller fra plader, der er oprettet som beskrevet i denne video artiklen og at registrere og bearbejde røntgendiffraktion fra dem. Disse emner behandles i separate Jové artikler i denne serie 1,15.
Disclosures
Ingen interessekonflikter erklæret.
Acknowledgments
Der er mange, der har bidraget til dette arbejde, og de fleste er fra Membrane strukturelle og funktionelle Biology Group, både tidligere og nuværende medlemmer. Til alle vi udvide vores varmeste tak og påskønnelse. Dette arbejde blev støttet delvist af tilskud fra Science Foundation Ireland (07/IN.1/B1836), National Institutes of Health (GM75915, P50GM073210 og U54GM094599), og FP7 COST Action CM0902.
Materials
| Name | Company | Catalog Number | Comments |
| Brayer (roller) | Fisher Scientific | 50820937 | Tool |
| Gas-tight syringes | Hamilton | 81030 | Tool |
| Glass coverslips | Marienfeld | 01029990911 | Disposable |
| Glass plates | Marienfeld | 1527127092 | Disposable |
| Gryphon LCP Robot | Art Robbins | NA | Tool |
| In meso robot | Anachem/Gilson | NA | Tool |
| Lab notebook | Various | NA | Tool |
| Mosquito LCP Robot | TTP Labtech | NA | Tool |
| Perforated double-stick spacer tape | Saunders Corporation (hole-punched) | customized | Disposable |
| Precipitant solutions | Various | Various | Reagent |
| Purified water | Millipore | NA | Reagent |
| Rain-X | Shell Car Care | 80199200 | Reagent |
| Syringe tips | Hamilton | 7770-020 (gauge 22) | Tool |
| Tissues | Various | Various | Disposable |
| Water bottle | various | NA | Reagent |
References
- Caffrey, M., Porter, C. Crystallizing membrane proteins for structure determination using lipidic mesophases. J. Vis. Exp. (45), e1712 (2010).
- Cherezov, V., Caffrey, M. Nano-volume plates with excellent optical properties for fast, inexpensive crystallization screening of membrane proteins. J. Appl. Crystallogr. 36, 1372-1377 (2003).
- Caffrey, M., Cherezov, V. Crystallizing membrane proteins using lipidic mesophases. Nat. Protocols. 4, 706-731 (2009).
- Liu, W., Cherezov, V. Crystallization of membrane proteins in lipidic mesophases. J. Vis. Exp. (49), e2501 (2011).
- Cherezov, V., Peddi, A., Muthusubramaniam, L., Zheng, Y. F., Caffrey, M. A robotic system for crystallizing membrane and soluble proteins in lipidic mesophases. Acta Crystallogr. D Bio.l Crystallogr. 60, 1795-1807 (2004).
- Peddi, A. High-throughput automated system for crystallizing membrane proteins in lipidic mesophases. IEEE Trans. Autom. Sci. Eng. 4, 129-140 (2007).
- Cheng, A., Hummel, B., Qiu, H., Caffrey, M. A simple mechanical mixer for small viscous lipid-containing samples. Chem. Phys. Lipids. 95, 11-21 (1998).
- Caffrey, M. Crystallizing membrane proteins for structure-function studies using lipidic mesophases. Biochem. Soc. Trans. 39, 725-732 (2011).
- Caffrey, M. Crystallizing membrane proteins for structure determination: use of lipidic mesophases. Annu. Rev. Biophys. 38, 29-51 (2009).
- Caffrey, M. Membrane protein crystallization. J. Struct. Biol. 142, 108-132 (2003).
- Gushchin, I., Reshetnyak, A., Borshchevskiy, V., Ishchenko, A., Round, E., Grudinin, S., Engelhard, M., Buldt, G., Gordeliy, V. Active State of Sensory Rhodopsin II: Structural Determinants for Signal Transfer and Proton Pumping. J. Mol. Biol. 412, 591-600 (2011).
- Jordan, P., Fromme, P., Witt, H. T., Klukas, O., Saenger, W., Krauss, N. Three-dimensional structure of cyanobacterial photosystem I at 2.5 angstrom resolution. Nature. 411, 909-917 (2001).
- Grawert, T., Span, I., Eisenreich, W., Rohdich, F., Eppinger, J., Bacher, A., Groll, M. Probing the reaction mechanism of IspH protein by x-ray structure analysis. Proc. Natl. Acad. Sci. USA. 107, 1077-1081 (2010).
- Cherezov, V., Caffrey, M. Picolitre-scale crystallization of membrane proteins. J. Appl. Crystallogr. 39, 604-606 (2006).
- Li, D., Boland, C., Aragao, D., Walsh, K., Caffrey, M. Harvesting and cryo-cooling crystals of membrane proteins grown in lipidic mesophases for structure determination by macromolecular crystallography. J. Vis. Exp. (67), e4001 (2012).
