

Summary
Hierin wird eine Roboter-Ansatz zur Hochdurchsatz-Kristallisation von Membranproteinen in lipidische Mesophasen zur Verwendung in Strukturbestimmung mittels makromolekularen Röntgenkristallographie beschrieben. Drei Roboter in der Lage Umgang mit dem viskosen und klebrigen Protein-beladenen Mesophase integraler Bestandteil der Methode eingeführt werden.
Abstract
Struktur-Funktions-Studien von Membranproteinen stark von mit verfügbaren hochauflösenden 3-D-Strukturen von der Art durch makromolekulare Röntgenkristallographie (MX) profitieren. Ein wesentlicher Bestandteil der MX ist eine stetige Versorgung mit idealerweise Beugung Qualität Kristalle. Die im meso oder lipidische kubischer Phase (LCP) Verfahren zur Kristallisation von Membranproteinen ist eine von mehreren verfügbaren Methoden zur Kristallisation von Membranproteinen. Es nutzt eine bikontinuierliche Mesophase, in dem Kristalle wachsen. Als Methode wurde es hatte einige spektakuläre Erfolge zu spät und hat viel Aufmerksamkeit mit vielen Forschungsgruppen nun mit daran interessiert. Eine der Herausforderungen mit der Methode ist, dass das Hosting Mesophase extrem zähflüssig und klebrig, erinnert an einen dicken Zahnpasta ist. So Abgabe manuell in reproduzierbarer Weise in kleinen Mengen in die Kristallisation Brunnen erfordert Geschick, Geduld und eine ruhige Hand. Ein Protokoll dafür just, die in der Membran Structural & Functional Biology (MS & FB) Gruppe 1-3 entwickelt wurde. JoVE Video Artikel beschreibt die Methode zur Verfügung 1,4.
Der manuelle Ansatz für die Gründung von meso Studien hat deutliche Vorteile mit speziellen Anwendungen, wie Kristall-Optimierung und Derivatisierung. Es ist jedoch davon, dass ein niedriger Durchsatz Verfahren leiden. Hier zeigen wir ein Protokoll für die Durchführung in meso Kristallisation Studien Roboter. Ein Roboter bietet die Vorteile von Geschwindigkeit, Genauigkeit, Präzision, Miniaturisierung und in der Lage ist, kontinuierlich zu arbeiten für längere Zeiträume unter was als feindlichen Bedingungen wie im Dunkeln angesehen werden, in einer reduzierenden Atmosphäre oder bei niedrigen oder hohen Temperaturen. Ein in meso Roboter, wenn sie richtig eingesetzt, können erheblich zur Verbesserung der Produktivität von Membranprotein Struktur und Funktion der Forschung durch die Erleichterung Kristallisation, die eine der langsamen Schritten in der esGesamtstruktur Bestimmung Pipeline.
In diesem Video Artikel zeigen wir die Verwendung von drei handelsüblichen Roboter, die den viskosen und klebrigen Mesophase integralen in meso Kristallogenese verzichten kann. Der erste Roboter wurde in der MS & FB Group 5,6 entwickelt. Die anderen beiden sind seit kurzem verfügbar und werden hier der Vollständigkeit halber aufgeführt.
Eine Übersicht über das Protokoll in diesem Artikel behandelt wird in Abbildung 1 dargestellt. Alle Manipulationen bei Raumtemperatur (~ 20 ° C) unter Umgebungsbedingungen durchgeführt.
Protocol
Ein. Vorbereiten der Kristallisation Platte
Einrichten eine Kristallisation Studie Roboter zu tun beginnt mit der Vorbereitung der Bodenplatte des Glas-Sandwich Kristallisationsplatte (Abbildung 2), im Detail Reference 2 beschrieben. Die Bodenplatte muss zunächst silanisiert und die perforierte Doppel-stick Abstandshalter, die Brunnen erstellt, muss auf die Platte aufgetragen werden. Die Hilfs-und Betriebsstoffe für diese benötigt werden unter Materialien aufgeführt.
- Legen Sie die Platte auf einem Papiertuch, ein paar Tropfen der Silanisierung Lösung und verteilen sie gleichmäßig über die Plattenoberfläche mit einem Papiertuch.
- Entfernen überschüssigen Silanisierungsmittel Lösung durch Eintauchen der Platte in ein Becherglas mit Wasser.
- Nehmen Sie die Platte aus dem Becher, legen Sie sie auf ein trockenes Papiertuch, silanisiert Seite nach oben, und trocknen ihre exponierte Oberfläche durch Wischen leicht mit einem Papiertuch.
- Ziehen Sie die Schutzabdeckung auf dem perforierten, Doppel-stick Abstandhalterund Anwendung des Abstandshalters, klebrigen Seite nach unten, um das trockene, silanisierte Oberfläche der Glasplatte. Stellen Sie sicher, dass der Abstandshalter richtig auf der Grundplatte positioniert ist, mit der oberen linken Ecke und den beiden benachbarten Seiten der Abstandshalter und der Platte zusammenfällt.
- Mit einer Walze oder Brayer abzuflachen, um den Abstandshalter an der Basisplatte und um eine dichte Dichtung zwischen ihnen zu schaffen.
Fertigteilplatten sind kommerziell erhältlich (HR3-151, Hampton Research; MD11-55-100, Molecular Abmessungen und LCP96T-UVP70U, Swissci). Aus Kostengründen bevorzugen wir unsere eigenen Platten nach dem Protokoll über zusammenzubauen.
2. In Meso Robot 1
Der erste in meso-Roboter in diesem Video Artikel gezeigt werden, ist das ein derzeit in der MS & FB Group (Abbildung 3). Alle Einzelheiten der Roboter kann unter Materialien und in der Referenz 5 gefunden werden. Die Materialien und equipment zum Einrichten einer Kristallisation Studie mit Hilfe des Roboters sind unter Materialien aufgeführt.
- Legen Sie die Bodenplatte mit Abstandshalter in Abschnitt 1 auf dem Deck des Roboters vorbereitet. Es hat seine eigene Plattform mit gut Positionen für Zwecke der Grundplatte Ausrichtung markiert. Die Platte sollte für Identifizierungszwecke markiert werden.
- Sichern den 96-well Block in Fällungsmittel eigene Plattform auf dem Deck des Roboters neben dem Kristallisationsplatte.
- Öffnen Sie den Baustein sorgfältig durch Abziehen der Kunststoff-Verschlusskappe.
- Einschalten des Befeuchters und lenken den Strom der feuchten Luft über und über der Basis-Platte auf dem Deck des Roboters. Der Befeuchter ist gezeigt worden, um die Verdampfung des Fällungsmittels Lösung zu reduzieren und die Reproduzierbarkeit über der Kristallisationstemperatur Platte 5 zu verbessern. Es kann nach vorheriger gedreht werden, um Set-up vor, befeuchten die Gegend, wenn relative Luftfeuchtigkeit niedrig ist, oder nicht, kurz vor der Abgabe von Mesophase beginnt.
- Initialisieren des Roboters nach den Anweisungen des Herstellers. Instrument spezifische Anweisungen werden hier nicht im Detail beschrieben werden, weil genaue Verfahren im Laufe der Zeit verändern wird. Im Wesentlichen, was während der Initialisierung ist, dass der Arm auf Mesophase Abgeben des Roboters mit Referenzpositionen in drei orthogonalen Richtungen X, Y und Z bereitgestellt wird
- Bringen Sie die Protein-beladenen Mesophase in einem Hamilton-Spritze, komplett mit Dosiernadel, um Arm 1 des Roboters (Abbildung 3). Ausführliche Informationen, wie man die Mesophase und wie bereiten Sie es in die Spritze geladen haben Referenzen 3,7-10 beschrieben worden.
- Entfernen Sie die obere Schutzabdeckung von der Abstandshalter auf der Kristallisation Grundplatte und richten Sie die Vertiefungen auf der Platte mit Passermarken auf der Grundplatte Plattform. Anmerkung für die Zwecke dieser Video wurde die Schutzabdeckung an ihrem Platz gelassen, um das Viewer während der Ausrichtungsschritt unterstützen.
- Richten Sie die Nadelspitze der Abgabe syringe mit der Unterseite des obersten gut in der linken Ecke der Kristallisation Platte (Well A1). Dies wird durch Einstellen der Höhe Auges oder Z-Koordinate des Abgeben Arm während beobachten, wie nahe die Nadelspitze auf den Grund des Bohrlochs kommt getan. Dass die Spitze gerade berührt den Boden des Bohrlochs kann durch Bewegen der Platte von Seite zu Seite auf der Plattform während immer so leicht Einstellen der Höhe der Abgabearm beurteilt werden.
- Eintragen in den Computer die Z-Koordinate des Armes, wo die Abgabevorrichtung Spitze kontaktiert die Platte. Abgabevorrichtung programmiert ist, um Platz mit der Nadelspitze 80 Mikrometer von diesem Bezugspunkt Z-Position, die der Fläche der Grundplatte entspricht nehmen.
- Position mit dem Auge die Spitze der Nadel in der Mitte des Well A1. Laden in dem steuernden Rechner der Verweis X, Y-Koordinate des Abgeben Arm, wo die Spitze zentriert ist. Dieses Koordinatensystem wird verwendet, um den Mittelpunkt der übrigen Vertiefungen auf der Platte zu definieren.
- Prime die Spritze mit einem entsprechenden Befehl an den Roboter Computer dass frisches Mesophase sicherzustellen füllt die Dosiernadel und dass die ersten und nachfolgenden Vertiefungen erhalten ihre volle Ergänzung der Mesophase. Abzuwischen extrudierten Mesophase an der Nadelspitze mit Gewebe.
- Starten Sie den Run Robot (X-AP) Programm, um eine Runde Spülschritte wo die Fällungsmittel Abgabe Tipps Arm 2 des Roboters gewaschen und bereit sind, Lösungen aus dem Fällungsmittel Block absaugen zu initiieren.
- Aktivierung des Spendefunktion am Roboter in Bewegung zu setzen die sequentielle Laden von Vertiefungen mit Protein-beladenen Mesophase (üblicherweise 50 nl) erste, eine Spalte von acht Vertiefungen zu einer Zeit, durch Fällungsmittel Lösungen (in der Regel 800 nl) gefolgt. Spalten zwischen dem Laden, befeuchtet die Mesophase Abgabearm kehrt zu einer Parkposition, wo das Ende der Nadel in einen Schwamm gelegt wird, um den Mesophase an der Spitze zu verhindern das Austrocknen. Verfahren des Abgebens Mesophase und Fällungsmittel wird wiederholt11-mal über die Platte, bis die Platte gefüllt. Die Beladung einer 96-Well-Platte mit Mesophase und Fällungsmittel in 5 min in Anspruch.
- Sobald die Platte gefüllt ist und die Roboterarme haben, um ihre Parkpositionen zurückgekehrt, entfernen Sie die Platte aus dem Deck des Roboters und legen Sie es auf eine ebene feste Oberfläche.
- Unmittelbar, dichten die Platte mit einem Deckglas, um zeitabhängige Veränderungen in gut Zusammensetzung zu minimieren. Es ist wichtig, sicherzustellen, dass alle 96 Wells vollständig abgedeckt werden, dass das Deckglas ausgerichtet ist mit der Grundplatte quadratisch und dass keiner der Deckglas erstreckt sich über den Fußabdruck der Grundplatte. Eine Walze oder Brayer verwendet wird, um eine feste und eine gleichmäßige Abdichtung zwischen dem Deckglas und dem Abstandhalter zu schaffen.
- Überprüfen Sie die Platte sicher zu sein das set up ging, wie es sollte. Was man sucht, ist ein "Spiegelei auf einem pan 'Auftritt in jede Vertiefung. Das Eigelb des Spiegelei entspricht der Mesophase. Das Weiß des Eies ist das Fällungsmittel Löauf und der Rand der Pfanne ist vom Rand der Kristallisation gut. Idealerweise sind die drei konzentrischen.
- Die Platte wird in einem temperierten Lagerraum für Kristallwachstum.
- Wenn keine weiteren Platten eingerichtet werden sollen, entfernen Sie das Fällungsmittel Block vom Deck des Roboters, verschließen Sie diese sorgfältig und steckte es zurück ins Lager.
- Entfernen Sie die Spritze mit der Mesophase aus dem Abgeben Arm des Roboters, demontieren und wäscht seine Teile einschließlich Dosiernadel und Ferrule, vorsichtig mit Methanol und trocken in Vorbereitung für den nächsten Einsatz.
3. In Meso Robot 2. Mosquito LCP
Die Moskito LCP Roboter (Abbildung 4) eine ähnliche Ausgabevorrichtung Mesophase dem von Roboter 1 verwendet. Im Gegensatz zu Roboter 1, verzichtet er Fällungsmittel durch Einwegspitzen. Programmier-Software wird verwendet, um das Instrument für die Zusammenarbeit mit bestimmten Kristallisation Platten und precipitant-Blöcke, und die Benutzerfreundlichkeit definierter Volumina von Mesophase und Fällungsmittel in einer bestimmten Reihenfolge zu verzichten. Solche Details sind vom Hersteller bereitgestellt und wird hier nicht beschrieben werden.
- Bereiten Sie eine Hamilton-Spritze, komplett mit Nadel und gefüllt mit Protein-beladenen Mesophase, wie oben unter Robot 1 und in JoVE Artikel 1712 1 beschrieben.
- Klemmen die Spritze in Position auf der Abgabevorrichtung Arm des Roboters.
- Verwenden Sie das Deck montiert Lasersensor, um die X-und Y-Koordinaten der Nadel auf der Dosierspritze etablieren. Dies ist ein wichtiger Schritt erforderlich, um sicherzustellen, daß die Mesophase genau in der Mitte jeder Vertiefung auf der Platte verteilt.
- Mit einem Tastendruck auf dem Bedienfeld, prime die Spritze Mesophase von der Nadel zu vertreiben. Entfernen extrudierten Mesophase von der Nadelspitze mit Gewebe in Vorbereitung für die Verwendung des Roboters zu Vertiefungen laden.
- Vor dem Einsetzen der Kristallisation Platte auf dem Deck des Roboters feuchteen der Oberfläche der Plattform mit ein paar Tropfen Wasser zu helfen, halten Sie die Platte an Ort und Stelle durch Kapillarwirkung.
- Entfernen Sie die Schutzkappe von der Abstandhalter auf dem Glas Bodenplatte und legen Sie es auf seiner Plattform fest gute Haftung zu gewährleisten. Mit den drei Bezugsmarkierungen auf der Plattform, um die drei Vertiefungen Ecke wodurch eine ordnungsgemäße Positionierung der Vertiefungen auf der Platte in Bezug auf die Abgabe Nadelspitze auszurichten. Das Instrument ist nun um einen befohlenen Abgabezyklus Kraft.
- Der Zyklus beginnt mit einer zweiten Priming-Schritt, wo Mesophase auf eine kleine Glasplatte verzichtet wird sofort, bevor sie zu Brunnen mit frischem Mesophase laden. Die Roboter zunächst Lasten mit Mesophase eine vertikale Säule von 8 Vertiefungen auf der Platte und verwendet dann die Einweg-Tipps Fällmittellösung auf der Mesophase Bolus verzichten. Der Prozeß wird 11 Mal entlang der Länge der Platte wiederholt, bis alle Vertiefungen gefüllt werden. Der gesamte Prozess dauert etwa 5 min zu vervollständigen.
- Entfernender gefüllte Platte von der Plattform des Roboters und versiegeln mit einem Deckglas, wie oben unter 1 beschriebenen Roboter.
- Legen Sie die Platte, ordnungsgemäß beschriftet, in einer temperaturkontrollierten Umgebung für das Kristallwachstum.
4. In Meso Robot 3. Gryphon LCP
Der Greif LCP Roboter (Abbildung 5) eine ähnliche Mesophase Abgabesystem zu dem oben beschriebenen für Roboter 1 und 2. Was sie von den anderen beiden ist, dass alle 96 Fällungsmittels Lösungen gleichzeitig ausgegeben werden.
- Bereiten Sie die Protein-beladenen Mesophase und laden Sie es in die Dosierspritze, wie oben beschrieben, unter Robots 1 und 2, und in JoVE Artikel 1712 ein.
- Klemmen die Spritze in Position auf der Abgabevorrichtung Arm des Roboters.
- Platzieren Sie die Fällungsmittellösung Block und Kristallisation Platte auf dem Deck des Roboters.
- Laden Sie die 96-tip head mit Fällungsmittel Lösungen. Ein Benutzer-definierten Verzögerungszeit ist vorgesehen, um zu erleichtern Absaugen viskose Fällungsmittel.
- Befiehl das Instrument an einen Ausgabezyklus geben. Der Zyklus beginnt mit dem Mesophase sequentiell in die 96 Vertiefungen in einem Prozess, der etwa 1 min in Anspruch nimmt verzichtet. Der 96-Spitzenkopf gibt dann alle 96 Fällungsmittel Lösungen auf einmal am Anfang der Mesophase Boli in der Kristallisation Brunnen. Die gesamte Platte Ladevorgang in 2 min beendet.
- Die gefüllte Platte von der Plattform des Roboters und versiegeln mit einem Deckglas, wie oben unter 1 beschriebenen Roboter.
- Legen Sie die Platte, ordnungsgemäß beschriftet, in einer temperaturkontrollierten Umgebung für das Kristallwachstum.
5. Repräsentative Ergebnisse
Der Zweck dieses Video Artikel soll zeigen, wie Sie automatisch Kristallisation Studien mit einer viskosen, Membranprotein-beladenen Mesophase in Glas Sandwichpaneelenh 96-well Platten Kristallisation. Der Schwerpunkt liegt auf der Automatisierung durch den Einsatz von spezialisierten Roboter, die minimale manuelle Eingriffe erfordern. Reproduzierbarkeit und Präzision in Bezug auf Volumina von Mesophase und Fällungsmittel verzichtet und die Platzierung von sowohl innerhalb des Bohrlochs, werden erwartet, wenn ein Roboter verwendet wird. Dies sind aus der Sicht der wirksame Abschirmung von Bedingungen, Kristallogenese unterstützt wichtig. Sie sind auch kritisch für den nächsten Schritt in der Analyse Rohrleitung, die zu einem Kristallwachstum oft getan mit bildgebenden Geräten auswerten kann. Drop oder Bolus Ort ist der Schlüssel zum bildgebenden Verfahren und unregelmäßig und falsche Platzierung des Bolus in den Brunnen erfordert in der Regel Eingreifen des Benutzers zur Korrektur und braucht Zeit. Zum Zwecke der Darstellung sind Beispiele von ordnungsgemäß und nicht ordnungsgemäß eingelegt Platten in 6 gezeigt.
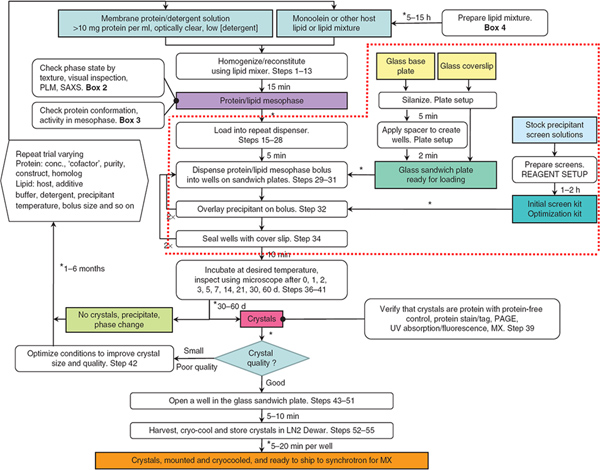
Abbildung 1. Das Flussdiagramm fasst die Schritte bei der Herstellung, Ernte und Kryo-Kühlung in meso-grown-Kristallen Membranprotein beteiligt. Schritte durch die gestrichelte rote Linie umgeben sind der Schwerpunkt dieser JoVE Artikel. Roboter wurden verwendet, um Lösungen und Fällungsmittel Mesophase in den Schritten 29 bis 32 verzichtet werden. Von Reference 3. Klicken Sie hier für eine größere Abbildung zu sehen .

Abbildung 2. Ein voll beladen und verschlossen 96-well Glas-Sandwich Kristallisationsplatte. Jede Vertiefung enthält 50 nl kubischen Phase und 1 ul Fällmittellösung. Aus Gründen der Übersichtlichkeit ist die kubische Phase mit dem Sudan Red angefärbt und die Fällmittellösung enthält Methylenblau. Von Reference 5.
_upload/4000/4000fig3.jpg "alt =" Abbildung 3 "/>
Abbildung 3. Die in meso Roboter (Robot 1). Der Roboter hat zwei Arme. Arm 1 verzichtet das Protein beladenen Lipid Mesophase. Arm 2 verzichtet Fällungsmittel Lösungen. Beim Befüllen bleibt der 96-Well-Platte in ihrer Position auf dem Deck des Roboters, die selbst stationär befestigt. Die beiden Arme bewegen Mesophase und Fällungsmittel Lösungen zu liefern. Von Reference 3.

Abbildung 4. Die Mosquito LCP Roboter (Robot 2). Im Gegensatz zu Robot 1, dem Deck des Mosquito LCP, auf denen die 96-Well-Platte und der Fällmittellösung Block sitzen, bewegt sich horizontal während der Befüllung.

Abbildung 5. Die Gryphon LCP Roboter (Robot 3). Während eineinzurichten, bewegt sich die Lipid-kubischen Phase Spender Protein-beladenen Mesophase auf die 96-Well-Platte zu liefern. Das Deck übersetzt dann horizontal, um die Platte unter dem Fällmittellösung Spitzenkopf positionieren. Alle 96 Fällungsmittel Lösungen werden gleichzeitig ausgegeben. Bild des Herstellers (bezogen http://www.artrobbins.com/ ) und beschriftet.

Abbildung 6. Ein voll beladen und verschlossen 96-well Glas-Sandwich Platte (A) und Brunnen richtig (B) und falsch (C, D) gefüllt mit dem in meso Roboter (Robot 1). Die Barcode-Etikett auf der Platte in A wird verwendet, um die Platte in der Platte Inkubator / Bildgebungsvorrichtung verfolgen. Einsatzplatten BD, Fällungsmittellösung und Mesophase markiert sind P und M sind. Die erwarteten "Spiegelei auf einem pan 'Erscheinungsbild des Bohrlochs in B ist charakteristisch für eine ordnungsgemäß geladen und abgedichtet gut. In C, hat das Fällungsmittel in das Bohrloch unsachgemäß worden in einer außermittigen Position dispensiert und in Kontakt mit dem Abstandshalter kommen. In C wäre es auch ersichtlich, dass das Volumen der Mesophase kleiner als sie sein sollte. Ein Beispiel für unvollständige Beladung mit Fällungsmittellösung in D. Für Maßstab dargestellt ist, ist der Durchmesser aller Kavitäten 6 mm.
Discussion
In diesem Video Artikel haben wir gezeigt, wie man einen Roboter verwenden, um automatisch in meso Kristallisation Studien in 96-well Glas-Sandwich-Platten mit einem Protein-beladenen Lipid Mesophase. Die Roboter in dieser Arbeit verwendet wurden konstruiert, um eine positive Verschiebung Glasspritze für eine genaue und reproduzierbare Abgabe von Nanoliter des viskosen und klebrigen Mesophase umfassen, wie ursprünglich 7 beschrieben.
Genauigkeit und Präzision sind wichtige Merkmale eines Roboters. Allerdings sind diese Eigenschaften nur so gut wie der Grad und die Regelmäßigkeit, die Roboter-Performance ausgewertet und Kalibrierung durchgeführt wird. Es versteht sich von selbst, dass die Leistung des Roboters ausgewertet werden, während die einzelnen Platten eingestellt ist oben zeigt. Es ist nicht angemessen, davon auszugehen, dass der Roboter einwandfrei funktionieren und den Roboter zu verlassen, um unbeaufsichtigt laufen. Das aufmerksame und aufmerksame Fahrer sollte in einem pos seinition von einem Ton oder einem Auftritt, wenn etwas nicht richtig funktioniert und es sofort zu korrigieren beachten. Außerdem sollte jede Platte sorgfältig von Auge, sind für Gleichförmigkeit sowie Inhalt inspiziert, sobald die Platte verschlossen ist und bevor es auswärts zur Kristallisation gebracht Studien. Dieses sollte nur wenige Sekunden erforderlich durchzuführen und können durchgeführt werden, während die nächste Platte geladen wird. Bemerken, kann zum Beispiel, dass bestimmte Brunnen sind nicht richtig gefüllt unterstreichen die Tatsache, dass ein bestimmter Fällungsmittel Dosierspitze ist defekt. Lieferung von Mesophase gesehen sollte unregelmäßig sein, wäre die relevanten fehlerhaften Artikel müssen unverzüglich behoben werden. Indem man diese Probleme und macht die entsprechenden Anpassungen während der Einrichtung spart Zeit und Materialien, darunter wertvolle Lipid-und Membran-Protein. Wenn eine Kamera wird verwendet, um das Kristallwachstum zu verfolgen, können die Genauigkeit und Präzision auch während der Bildgebung überwacht werden. Zum Beispiel, systematische Probleme mit Tropfen oder BolusLage der von der Kamera zeigen, dass etwas nicht stimmt und dass Korrekturmaßnahmen irgendwo stromaufwärts in dem Protokoll benötigt wird.
Im Interesse der zuverlässigen Leistung daher muss der Roboter in regelmäßigen Abständen kalibriert werden und je nach Bedarf. Kalibrierungen sollten Volumen von Fällungsmittel und Mesophase sowie Bolus und Fällungsmittel Platzierung in der auch geliefert. Offensichtlich sollte möglichst Kalibrierung erfolgt über Volumen und Materialien, die ähnlich zu denen, die in Studien in der Zeit durch die Qualitätskontrolle Übung fallenden Gebieten eingesetzt werden wird.
Ebenso wichtig wie die Kalibrierung so auch in Lager eine ausreichende Versorgung mit Roboter Teile und Zubehör. Katastrophal und unerwarteten Ausfällen, Blockaden und Abstürze können und tun auftreten. In einem solchen Fall, mit einen Ersatz verfügbar Fällungsmittel Abgabespitze zum Beispiel könnte bedeuten, dass eine extrem wertvolle Membranprotein Zubereitung, wie es sollte verwendet wird undwird nicht verschwendet.
Einige der Vorteile eines Roboters gehört die Tatsache, dass es im Wesentlichen kontinuierlich arbeiten und dass sie nicht aus oder "klagen" Müdigkeit leiden. Ein Roboter kann auch unter Bedingungen, die nicht als menschliche ausgerichtet wie im Dunkeln verwendet werden, unter gesteuerten Beleuchtung und Umgebungsbedingungen und bei extremen Temperaturen. Die Roboter in diesem Artikel gezeigt wurden alle unter Umgebungsbedingungen bei ~ 20 ° C eingesetzt Allerdings gibt es Proteine und nicht-Projekte, die Umgebungstemperaturen gesteuerten Lichts 11,12 und eine oxidierende oder eine reduzierende Umgebung 13 erfordern. Alle diese Faktoren können arrangiert werden, mit relativer Leichtigkeit, wenn eine Kristallisation Roboters verwendet wird.
In einer früheren JoVE Video Artikel haben wir gezeigt, wie Kristallisation Studien durch die in meso Verfahren bis manuell 1 gesetzt. Das Mindestvolumen von Mesophasen, die zuverlässig von Hand verzichtet werden begrenzt by die Sehschärfe und stetige Händigkeit der Person der Einrichtung der Studien. Nach unserer Erfahrung sind Volumina von Mesophase so niedrig wie 100 nl leicht zu handhaben. Wir wissen von einem Labor, wo die Standard-Lautstärke verzichtet manuell etwa 40 nl. Allerdings sind wesentlich kleiner Volumina möglich mit einem Roboter. Getrennt haben wir gezeigt, dass Mesophase Volumen so niedrig wie 550 Picoliter robotically 14 verzichtet werden kann. Aus dieser Arbeit war es klar, dass eine weitere Miniaturisierung durch Roboter möglich, die, wenn sie umgesetzt würde zu einer starken Reduzierung der Menge an wertvollen Membranprotein, die zur Durchführung einer Kristallisation Studie zu führen.
In diesem Video Artikel wurden drei kommerziell erhältlichen Roboter verwendet, um High-Throughput-Membranprotein Kristallisation mit Lipid-Mesophasen zu demonstrieren. Die erste davon wurde in der MS & FB Group basieren auf unseren Erfahrungen Einrichten Studien manuell, wie in JoVE 1712 1 beschriebenen entwickelt. Dies ist das Instrumentment wir haben die meisten Vertrautheit mit und der Großteil des Stroms Gegenstand auf seine Verwendung gewidmet. Die beiden anderen Roboter waren am Demonstration in der MS & FB Group zum Zeitpunkt der Artikel geschrieben wurde, und die entsprechenden Aufnahmen wird hier im Interesse der Vollständigkeit halber aufgeführt. Alle drei Roboter verwenden sehr viel die gleiche Mesophase Dosiersystem, das wesentliche Merkmal von denen eine positive Verschiebung Glasspritze 5,7 ist. Sie unterscheiden sich am deutlichsten im Hinblick auf die Fällungsmittel Lieferung. Roboter 1 und 2 können gleichzeitig Fällungsmittel verzichten in 8 Vertiefungen eine einzelne Spalte auf einem Kristallisationsplatte zu einer Zeit. Im Gegensatz dazu verzichtet Robot 3 alle 96 Fällungsmittel Lösungen in einer einzigen Aktion. Robot 2 ist das einzige Instrument mit Einweg Fällungsmittel Abgabe Tipps. Es gibt Vorteile und Nachteile der verschiedenen Instrumente, die von der jeweiligen Anwendung abhängen zugeordnet, diese werden hier nicht erarbeitet werden. Es genügt zu sagen, dass alle drei Arbeiten und haben erzeugten Kristalle von mirmbrane Proteine durch die in meso-Methode.
Die nächsten Schritte in den gesamten Prozess der Strukturaufklärung von makromolekularen Kristallographie sind bis zur Ernte und Kryo-cool Kristalle aus Platten wie in diesem Video Artikel beschrieben zu setzen und speichern und verarbeiten Röntgenbeugung von ihnen. Diese Themen werden in separaten JoVE Artikel in dieser Serie 1,15 abgedeckt.
Disclosures
Keine Interessenskonflikte erklärt.
Acknowledgments
Es gibt viele, trugen zu dieser Arbeit und die meisten sind von der Membrane Strukturelle und Funktionelle Biology Group, beide in Vergangenheit und Gegenwart Mitglieder. Um alles, was wir verlängern unsere wärmsten Dank und Anerkennung. Diese Arbeit wurde zum Teil durch Zuschüsse aus Science Foundation Ireland (07/IN.1/B1836), den National Institutes of Health (GM75915, P50GM073210 und U54GM094599) und FP7 COST Action CM0902 unterstützt.
Materials
| Name | Company | Catalog Number | Comments |
| Brayer (roller) | Fisher Scientific | 50820937 | Tool |
| Gas-tight syringes | Hamilton | 81030 | Tool |
| Glass coverslips | Marienfeld | 01029990911 | Disposable |
| Glass plates | Marienfeld | 1527127092 | Disposable |
| Gryphon LCP Robot | Art Robbins | NA | Tool |
| In meso robot | Anachem/Gilson | NA | Tool |
| Lab notebook | Various | NA | Tool |
| Mosquito LCP Robot | TTP Labtech | NA | Tool |
| Perforated double-stick spacer tape | Saunders Corporation (hole-punched) | customized | Disposable |
| Precipitant solutions | Various | Various | Reagent |
| Purified water | Millipore | NA | Reagent |
| Rain-X | Shell Car Care | 80199200 | Reagent |
| Syringe tips | Hamilton | 7770-020 (gauge 22) | Tool |
| Tissues | Various | Various | Disposable |
| Water bottle | various | NA | Reagent |
References
- Caffrey, M., Porter, C. Crystallizing membrane proteins for structure determination using lipidic mesophases. J. Vis. Exp. (45), e1712 (2010).
- Cherezov, V., Caffrey, M. Nano-volume plates with excellent optical properties for fast, inexpensive crystallization screening of membrane proteins. J. Appl. Crystallogr. 36, 1372-1377 (2003).
- Caffrey, M., Cherezov, V. Crystallizing membrane proteins using lipidic mesophases. Nat. Protocols. 4, 706-731 (2009).
- Liu, W., Cherezov, V. Crystallization of membrane proteins in lipidic mesophases. J. Vis. Exp. (49), e2501 (2011).
- Cherezov, V., Peddi, A., Muthusubramaniam, L., Zheng, Y. F., Caffrey, M. A robotic system for crystallizing membrane and soluble proteins in lipidic mesophases. Acta Crystallogr. D Bio.l Crystallogr. 60, 1795-1807 (2004).
- Peddi, A. High-throughput automated system for crystallizing membrane proteins in lipidic mesophases. IEEE Trans. Autom. Sci. Eng. 4, 129-140 (2007).
- Cheng, A., Hummel, B., Qiu, H., Caffrey, M. A simple mechanical mixer for small viscous lipid-containing samples. Chem. Phys. Lipids. 95, 11-21 (1998).
- Caffrey, M. Crystallizing membrane proteins for structure-function studies using lipidic mesophases. Biochem. Soc. Trans. 39, 725-732 (2011).
- Caffrey, M. Crystallizing membrane proteins for structure determination: use of lipidic mesophases. Annu. Rev. Biophys. 38, 29-51 (2009).
- Caffrey, M. Membrane protein crystallization. J. Struct. Biol. 142, 108-132 (2003).
- Gushchin, I., Reshetnyak, A., Borshchevskiy, V., Ishchenko, A., Round, E., Grudinin, S., Engelhard, M., Buldt, G., Gordeliy, V. Active State of Sensory Rhodopsin II: Structural Determinants for Signal Transfer and Proton Pumping. J. Mol. Biol. 412, 591-600 (2011).
- Jordan, P., Fromme, P., Witt, H. T., Klukas, O., Saenger, W., Krauss, N. Three-dimensional structure of cyanobacterial photosystem I at 2.5 angstrom resolution. Nature. 411, 909-917 (2001).
- Grawert, T., Span, I., Eisenreich, W., Rohdich, F., Eppinger, J., Bacher, A., Groll, M. Probing the reaction mechanism of IspH protein by x-ray structure analysis. Proc. Natl. Acad. Sci. USA. 107, 1077-1081 (2010).
- Cherezov, V., Caffrey, M. Picolitre-scale crystallization of membrane proteins. J. Appl. Crystallogr. 39, 604-606 (2006).
- Li, D., Boland, C., Aragao, D., Walsh, K., Caffrey, M. Harvesting and cryo-cooling crystals of membrane proteins grown in lipidic mesophases for structure determination by macromolecular crystallography. J. Vis. Exp. (67), e4001 (2012).
