

Summary
여기가 macromolecular X-선 결정학을 사용하여 구조 결정에 사용 lipidic mesophases의 막 단백질의 높은 처리량 결정에 로봇 접근 방식을 설명합니다. 방법 통합 점성과 끈적 끈적한 단백질을이고 mesophase을 처리 할 수있는 로봇을 소개합니다.
Abstract
막 단백질의 구조 기능 연구는 크게 macromolecular X-선 결정학 (MX)를 통해 제공되는 유형의 사용 가능한 고해상도 3-D 구조를 갖는 혜택을 누리 실 수 있습니다. MX의 필수 요소가 이상적으로 회절 품질의 결정을 안정적으로 공급합니다. meso 또는 막 단백질을 crystallizing에 대한 lipidic 입방 단계 (LCP) 메소드의는 막 단백질을 crystallizing에 사용할 수있는 여러 가지 방법 중 하나입니다. 이 결정을 성장하기에 bicontinuous mesophase을 사용합니다. 방법으로, 늦었의 일부 멋진 성공을 가지고 지금 그것을 사용에 관심이 많은 연구 그룹과 많은 관심을 받고있다. 방법과 관련된 문제 중 하나는 호스팅 mesophase은 두꺼운 치약을 연상 매우 점성하고 끈적 때문입니다. 따라서, 결정화 우물에 작은 볼륨의 재현 방식으로 수동으로 분배하는 기술, 인내와 꾸준한 손을 필요로합니다. 주 일을하기위한 프로토콜막 기능 및 구조 생물학 (MS & FB) 그룹 1-3에 개발 된 ST. 방법을 설명 주피터 비디오 기사를 이용하실 수 1,4 수 있습니다.
meso 시험에서 설정하는 수동 방식은 크리스탈 최적화 및 derivatization와 같은 전문 응용 프로그램과 별개의 장점을 가지고 있습니다. 그것은 그러나 낮은 처리량 방법이되는 것을 고통 않습니다. 여기, 우리는 robotically meso의 결정화 시험에서 수행하기위한 프로토콜을 보여줍니다. 로봇은 속도, 정확성, 정밀, 소형화 및 감소 분위기 속에서 또는 낮거나 높은 온도에서 같은 어둠 속에서 같은 적대적 조건으로 간주 될 수 있습니다 무엇에 따라 오랜 기간 동안 지속적으로 일을 할 수있는 장점을 제공합니다. 제대로 사용 meso 로봇에 크게의 느린 단계 중 하나입니다 결정을 촉진하여 막 단백질 구조의 생산성과 기능 연구를 향상시킬 수 있습니다전체 구조 결정 파이프 라인.
이 비디오 문서에서는, 우리는 meso의 crystallogenesis의에 통합 점성과 끈적 mesophase을 투여 할 수있는 세 상용 로봇의 사용을 보여줍니다. 첫 번째 로봇은 MS & FB 그룹 5,6에서 개발되었습니다. 다른 두 사람은 최근 사용할 수있게하고 완성도를 위해 여기에 포함되어 있습니다.
이 문서에서 다루는 프로토콜의 개요는 그림 1에 표시됩니다. 모든 조작은 실내 온도 (~ 20 ° C) 주변 조건에서 수행되었다.
Protocol
1. 결정화 플레이트 준비
robotically 결정 시험을 수행하도록 설정하면 인용 발명 2에 자세히 설명 유리 샌드위치 결정 플레이트 (그림 2)의베이스 플레이트의 준비를 시작합니다. 베이스 플레이트가 먼저 silanized해야하며 우물을 만들고 구멍을 두 번 스틱 스페이서는, 판에 적용해야합니다. 이 필요한 자료 및 물품은 재료에 따라 세분화되어 있습니다.
- 종이 타월에 판을 놓고 솔루션을 silanizing의 몇 방울을 적용하고 종이 티슈로 판 표면에 균등하게 배포 할 수 있습니다.
- 물을 비커에 금속판을 immersing하여 초과 silanizing 솔루션을 제거합니다.
- 비커의 판을 꺼내, 드라이 종이 타월, silanized면에 게재 할, 그리고 종이 수건으로 가볍게 닦고함으로써 노출 된 표면을 건조.
- 구멍을 두 번 스틱 스페이서에 보호 커버 보지그리고 유리 접시의 건조, silanized 표면에, 스페이서, 끈적한면을 아래로 적용됩니다. 스페이서가 상단 왼쪽 코너와 스페이서의 두 개의 인접한면과 일치하는 판과,베이스 판에 제대로 위치되어 있는지 확인합니다.
- 베이스 판에 스페이서를 평평하게하고 그들 사이의 방수 밀봉을 만들 롤러 또는 brayer을 사용합니다.
사전 조립 된 접시는 (; MD11-55-100, 분자 크기 및 LCP96T - UVP70U, Swissci HR3-151, 햄튼 연구) 상업적으로 사용할 수 있습니다. 비용상의 이유로, 우리는 위의 프로토콜에 따라 우리 자신의 접시를 구성하는 것을 선호합니다.
2. Meso 로봇 1
이 비디오 문서에 입증 할 meso 로봇의 첫 번째는 현재 MS & FB 그룹 (그림 3)에서 사용되는 하나입니다. 로봇의 전체 내용은 재료에서와 참조 섹션 5에서 찾을 수 있습니다. 자료 및 equipmeNT는 재료에 따라 세분화되어 로봇을 사용하여 결정화 재판을 설정이 필요합니다.
- 로봇의 갑판에서 제 1 준비 스페이서와베이스 플레이트를 배치합니다. 그곳은 기지 판 정렬의 목적을 위해 잘 위치가 표시 자체 플랫폼이 있습니다. 플레이트는 식별 목적으로 표시해야합니다.
- 결정화 판 옆에있는 로봇의 갑판에서 자신의 플랫폼에서 96 - 웰 침전제 블록을 고정합니다.
- 플라스틱 실링 캡을 벗겨으로 조심스럽게 블록을 엽니 다.
- 가습기를 켜고 로봇의 갑판에서 바닥 판 이상에서 습한 공기의 흐름을 지시. 가습기는 침전제 솔루션의 증발을 감소하고 결정 판 5에서 재현성을 향상시키기 위해 표시되었습니다. 그것은 mesophase의 분배가 개시 직전, 그렇지 않으면 주위 상대 습도가 낮은 상태에서이 지역을 미리 ...을 축이다, 또는 이전에 ON으로 설정 - 업 설정할 수 있습니다.
- 제조업체의 지침에 따라 로봇을 초기화합니다. 정확한 절차가 시간이 지남에 따라 변화하기 때문에 악기 별 안내는 어떠한 자세히 여기에 설명되지 않습니다. 기본적으로, 어떻게 초기화하는 동안 발생하면 로봇에 팔을 분배 mesophase의 세 가지 직교 방향으로 X, Y 및 Z '의 기준 위치와 함께 제공된다는 점입니다
- 로봇의 팔 1 (그림 3)에, 바늘을 분배 완비, 해밀턴 주사기에 단백질을이고 mesophase을 첨부합니다. 주사기로를로드 mesophase 방법과 준비하는 방법에 대한 자세한 내용은 참고 자료 3,7-10에 설명되어 있습니다.
- 결정화베이스 판에 스페이서에서 상부 보호 덮개를 제거하고베이스 플레이트 플랫폼에서 fiducials있는 판에있는 우물을 맞 춥니 다. 참고이 동영상의 목적, 보호 커버가 정렬 단계에서 뷰어를 지원하기 위해 자리에 남아되었다.
- 분배 syring의 바늘 끝을 정렬결정화 플레이트 (자 A1)의 왼쪽 모서리에 잘 맨 하단에있는 전자. 이것은 바늘 끝이 잘의 맨 아래에 있습니다 얼마나 가까운 보면서 분배 팔의 높이 또는 Z-좌표를 조정 눈으로 이루어집니다. 팁 그냥 잘의 하단을 터치 있다는 것은 분배 팔의 높이를 조정 아무리 약간하면서 플랫폼에서 좌우로 판을 이동하여 판단 할 수 있습니다.
- 컴퓨터에 팁 연락처 판 분배 팔의 Z 좌표를 입력합니다. 분배이 80 마이크로 미터이 참조베이스 플레이트의 표면에 해당하는 Z-위치에서 바늘 끝으로 자리를 차지하도록 프로그래밍되어 있습니다.
- 눈 잘 A1의 중앙에 바늘 끝의 위치. 제어 컴퓨터 참조 X, 팁이 중심 분배 팔 Y 좌표에 저장합니다. 이 좌표는 접시에 남아있는 우물의 중심을 정의하는 데 사용됩니다.
- PR신선한 mesophase을 보장하기 위해 로봇 컴퓨터에 적절한 명령을 사용하여 IME 주사기 분배 바늘과 첫 번째 및 그 이후의 우물이 mesophase 자신의 전체 보완을받을 수를 채 웁니다. 조직과 바늘 끝에 압출 mesophase을 닦아주십시오.
- 로봇의 팔 2 침전제 분배 팁을 세척하고 침전제 블록에서 솔루션을 기음 할 준비가되어 단계를 플러싱의 라운드를 시작하는 실행 로봇 (X-AP) 프로그램을 시작합니다.
- 활성화 움직임에 침전제 솔루션 (보통 800 NL)에 이어 첫번째 단백질 라덴 mesophase (보통 50 NL), 한 번 8 우물의 열과 우물의 순차적 로딩을 설정할 수있는 로봇에 기능을 투여.에게 로드 열 사이에, 바늘의 끝은에 배치되어있는 주차 위치로 mesophase 분배 암 반환 아웃 건조에서 끝에서 mesophase을 방지하기 위해 스펀지를 moistened. 분배 mesophase와 침전제의 과정은 반복된다판에 걸쳐 11 시간 플레이트는 가득 될 때까지. mesophase와 침전제로 96 - 웰 플레이트의로드를 완료하는 데 5 분 정도 소요됩니다.
- 접시가 가득하고 로봇 팔이 공원의 위치로 돌아 즉시, 로봇의 갑판에서 판을 제거하고 평평한 고체 표면에 놓으십시오.
- 즉시 잘 구성의 시간에 따라 달라 변경 사항을 최소화하기 위해 커버 유리로 판을 밀봉. 이 커버 유리는베이스 플레이트와 광장 정렬 및 커버 유리의 아무도는베이스 플레이트의 면적 넘어 확장되지 않으니, 모든 96 우물이 완전히 적용되어 있는지 확인하는 것이 중요합니다. 롤러 또는 brayer는 커버 유리와 스페이서 사이의 강함과 균일 한 인감을 만드는 데 사용됩니다.
- 가 제대로 설정이 올라가 확인하기 위해 판을 검사합니다. 어떤 사람이 찾고 것은 각도에 등장하는 '팬에 튀긴 계란'이다. 튀긴 계란의 노른자는 mesophase에 해당합니다. 계란의 흰색은 침전제 soluti입니다와 팬의 가장자리가 잘 결정의 경계입니다. 이상적으로, 셋은 동심입니다.
- 크리스탈 성장을위한 온도 조절 저장 영역에있는 접시를 놓습니다.
- 더 이상 접시가 설정 할 수없는 경우, 로봇의 갑판에서 침전제 블록을 제거 단단히 그것을 밀봉하고 창고로 돌아 넣어.
- 로봇의 분배 팔에서 mesophase가 포함 된 주사기를 제거를 해체하고, 다음 사용을위한 준비 메탄올 건조를주의 깊게 분배 바늘과 페럴 등의 부품을 씻는다.
3. Meso 로봇이합니다. 모기 LCP
모기 LCP 로봇 (그림 4) 로봇 (1)에 의해 사용하는에 유사한 mesophase 디스펜서을 포함한다. 로봇 1 대조적으로, 그것은 일회용 팁에 의해 침전제 dispenses. 프로그래밍 소프트웨어는 특정 결정화 접시 precipit 작업에 악기를 설정하는 데 사용됩니다개미 블록, 및 지정된 순서대로 mesophase와 침전제의 사용자 정의 볼륨을 투여합니다. 이러한 내용은 제조업체가 제공되며, 여기에 설명되지 않습니다.
- 로 로봇 1 아래와 목성의 기사 1712 1 위의 설명에 바늘로 완전하고 단백질을이고 mesophase로 가득 해밀턴 주사기를 준비합니다.
- 로봇의 분배 팔에 위치에 주사기를 고정.
- 데크를 사용 X 및 분배 주사기에 바늘의 Y 좌표를 설정하기 위해 레이저 센서를 장착. 이 mesophase이 판의 각 우물의 중앙에 정확하게 투여되어 있는지 확인하는 데 필요한 중요한 단계입니다.
- 제어판에있는 버튼의 터치와 함께 주요는 주사기 바늘에서 mesophase를 배출합니다. 우물을로드하는 로봇을 사용하기위한 준비 조직과 바늘 끝에서 압출 mesophase를 제거합니다.
- 로봇 습한의 갑판에 결정 플레이트를 삽입하기 전에모세관 현상에 의해 장소에서 접시를 개최하는 데 도움이 물 몇 방울과 플랫폼의 표면 ko 페이지를 참조하십시오.
- 유리베이스 판에 스페이서에서 보호 커버를 제거하고 좋은 준수를 보장하기 위해 단단히 플랫폼에 배치. 이를 분배 바늘 팁에 대해 접시에 우물의 적절한 위치를 확보 3 코너 우물을 정렬하기 위해 플랫폼에서 세 fiducials을 사용합니다. 악기는 이제 분배주기를 입력 할 명령입니다.
- 사이클은 mesophase은 신선한 mesophase과 우물을로드하는에 이동하기 전에 바로 작은 유리 플레이트에 투여 된 제 2 프라이밍 단계를 시작합니다. 다음 로봇 첫째 mesophase 판 8 우물의 수직 열이로드하고 mesophase bolus 상단에 침전제 솔루션을 투여 할 수있는 일회용 팁을 사용합니다. 모든 우물이 가득 될 때까지 과정은 판의 길이를 따라 11 번 반복됩니다. 전체 과정을 완료하는 데 약 5 분 정도 소요됩니다.
- 삭제가득 로봇의 플랫폼에서 플레이트와 로봇 1 아래 위에서 설명한대로 커버 유리로 밀봉.
- 크리스탈 성장을위한 온도 제어 된 환경에서 제대로 표시, 접시를 놓습니다.
4. Meso 로봇 3에서. Gryphon LCP
Gryphon LCP 로봇 (그림 5) 로봇 1, 2 위 설명 할 수있는 유사한 mesophase 분배 시스템을 포함한다. 어떤 다른 두에서 구별하면 모든 96 침전제 솔루션은 동시에 투여하는 것입니다.
- 단백질을이고 mesophase을 준비하고 로봇 1, 2에서, 위에 설명 된 바와 같이, 분배 주사기에로드하고, 주피터 문서에 1,712 1.
- 로봇의 분배 팔에 위치에 주사기를 고정.
- 로봇의 갑판에 침전제 솔루션 블록 및 결정화 판을 놓습니다.
- 96 팁 hea로드침전제 솔루션 개발. 사용자 정의 지연 시간은 점성 precipitants을 aspirating 촉진하기 위해 제공된다.
- 분배 사이클을 입력 악기를 지휘. 사이클은 mesophase이 완료 약 1 분 소요 프로세스에서 96 우물에 순차적으로 투여되고 시작됩니다. 96 팁 머리는 결정 우물에서 mesophase boluses의 상단에 한 번에 모든 96 침전제 솔루션을 dispenses. 전체 판 로딩 과정은 2 분에 완료되었습니다.
- 로봇의 플랫폼에서 채워 판을 제거하고 로봇 1 아래 위에서 설명한대로 커버 유리로 밀봉.
- 크리스탈 성장을위한 온도 제어 된 환경에서 제대로 표시, 접시를 놓습니다.
5. 대표 결과
이 비디오 문서의 목적은 점성, 유리 sandwic의 막 단백질을이고 mesophase 자동으로 결정화 실험을 설정하는 방법을 보여주기 위함이다H 96 - 웰 결정 판. 강조 최소한의 수동 개입을 필요로 전문 로봇의 사용을 통해 자동화에 있습니다. 로봇이 사용될 때 mesophase와 침전제 투여와 잘 내 두의 위치의 볼륨의 측면에서 재현성과 정밀성이 예상된다. 이러한 crystallogenesis을 지원하는 조건의 효율적인 심사의 관점에서 중요합니다. 또한 영상 장비를 자주 수행 크리스탈 성장을 평가하는 것입니다 분석 파이프 라인의 다음 단계에 대한 중요합니다. 떨어 뜨리거나 bolus 위치는 이미징 프로세스의 핵심이며, 우물에 bolus의 불규칙하고 부적절한 위치가 보통을 위해 해결하기 위해 사용자 개입이 필요하고 시간이 걸립니다. 그림의 목적 상, 제대로하고 부적절하게로드 플레이트의 예는 그림 6에 표시됩니다.
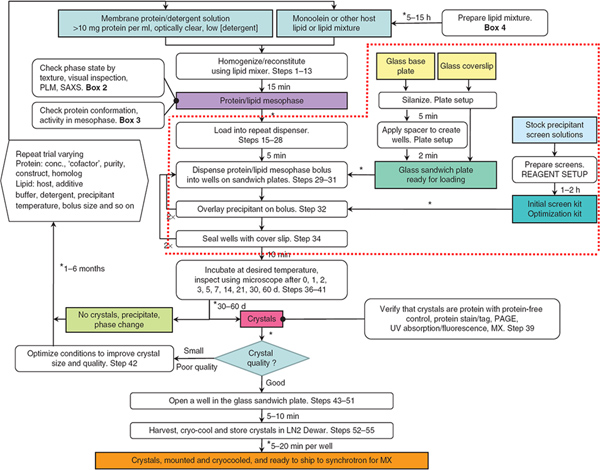
그림 1. 순서도는 meso-재배 막 단백질 결정의 생산, 수확 및 cryo 냉각하는 단계를 요약 한 것입니다. 점선 빨간색 선으로 둘러싸인 단계는이 목성 기사의 초점입니다. 로봇이 단계 29-32에 mesophase와 침전제 솔루션을 분배하는 데 사용되었습니다. 인용 발명 3에서. 큰 그림을 보려면 여기를 클릭하십시오 .

그림 2. 완전히로드와 봉인 96 - 웰 유리 샌드위치 결정 판. 각각의 잘 50 NL 입방 단계 1 μl 침전제 솔루션이 포함되어 있습니다. 명확성을 위해, 입방 단계는 수단 레드 물들과 침전제 솔루션은 메틸렌 블루를 포함하고 있습니다. 인용 발명 5에서.
_upload/4000/4000fig3.jpg "ALT ="그림 3 "/>
그림 3. meso 로봇 (로봇 1). 로봇은 두 팔을 수 있습니다. 무장 1 dispenses 단백질을이고 lipidic mesophase합니다. 무장 2 침전제 솔루션을 dispenses. 충전 중에는 96 - 웰 플레이트는 자체가 고정되는 로봇의 갑판에서 위치에 고정 남아 있습니다. 두 팔이 mesophase와 침전제 솔루션을 제공하기 위해 이동합니다. 인용 발명 3에서.

그림 4. 모기 LCP 로봇 (로봇 2). 로봇 1, 96 - 웰 플레이트와 침전제 솔루션 블록을 앉아있는시 모기의 LCP의 갑판에 대조적으로, 충전하는 동안 수평으로 이동합니다.

그림 5. Gryphon LCP 로봇 (로봇 3). 중설정 lipidic 입방 상 디스펜서는 96 - 웰 플레이트에 단백질을이고 mesophase를 제공하기 위해 이동합니다. 데크는 침전제 솔루션 팁 머리를 접시의 위치를 수평으로 변환합니다. 모든 96 침전제 솔루션은 동시에 투여합니다. 사진은 제조업체 (로부터 공급 http://www.artrobbins.com/ )와 표시.

그림 6. 완전히로드와 봉인 96 - 웰 유리 샌드위치 플레이트 (A)와 우물 제대로 (B)과 부적절 (C, D) meso 로봇 (로봇 1)를 사용하여 가득 찼다. 의 판에 바코드 레이블이는 판 보육 / 영상 장치에서 판을 추적하는 데 사용됩니다. 패널에서 BD, 침전제 솔루션과 mesophase는 각각 P와 M, 표시됩니다. 예상 '팬에 기름에 튀긴 계란'B에서 잘 모양이 제대로로드하고 잘 밀봉의 특징입니다. C에서, 침전제는 중심을 벗어난 위치에 잘 부적절한으로 투여되어 스페이서와 접촉했다. C에서는 mesophase의 볼륨이 있어야보다 덜하다고도 나타납니다. 침전제 솔루션을 통해 불완전로드의 예는 규모 D.에 표시되어, 모든 우물의 직경은 6mm입니다.
Discussion
이 동영상 글에서 우리는 자동으로 단백질을이고 lipidic mesophase를 사용하여 96 - 웰 유리 샌드위치 플레이트에 meso의 결정화 시험에 설정하는 로봇을 사용하는 방법을 보여주고 있습니다. 이 작품에 사용 된 로봇은 특별히 원래 7 설명한 바와 같이, 점성과 끈적 mesophase의 nanoliter 볼륨의 정확한 재현 배달에 대한 긍정적 인 변위 유리 주사기를 포함하도록 설계되었습니다.
정확성과 정밀도 로봇의 중요한 특징입니다. 그러나, 이러한 특성은 로봇 성능 평가 및 교정이 수행에 대한 학위와 규칙에 불과합니다. 그것은 개인 접시가 설정되고있는 동안 로봇의 성능을 평가해야한다고 말할 필요도 없죠. 이 로봇이 완벽하게 작동하고 자동 실행 로봇을 떠나 있다고 가정하는 것이 적절하지 않습니다. 세심하고주의 깊은 연산자는 POS에 있어야ition는 소리 나 무언가가 제대로 작동되지 않고 즉시 해결을 위해 모양으로 유의합니다. 또한 각 플레이트는 신중하게 즉시 플레이트가 봉인되어뿐만 내용의 균일을 위해 눈으로 검사해야합니다 그리고 그것은 결정화 실험 교도소에되기 전에. 이것은 다음 판을로드하는 동안 몇 초 수행하고 수행 할 수 있습니다 필요합니다. 알았어 예를 들어, 특정 우물이 제대로 작성되지 않는다는 것은 특정 침전제 분배 팁이 제대로 작동 있다는 사실을 강조 할 수 있습니다. mesophase의 게재가 불규칙적으로 볼 수 경우, 해당 결함있는 항목은 즉시 수정해야합니다. 이러한 문제를 지적하고 설정시 관련 조정을에 의해 가치가 지질과 막 단백질을 포함한 시간과 자료를 저장합니다. 영상은 크리스탈의 성장을 추적하는 데 사용하는 경우, 정확도 및 정밀도는 이미징 동안 모니터링 할 수 있습니다. 드롭 또는 bolus로 예를 들어, 체계적인 문제영상의 위치는 뭔가 옳지 않다고과 프로토콜 곳에서 상류 시정 조치가 필요한 것으로 나타났습니다.
신뢰할 수있는 성능의 이익에 따라서 로봇은 정기적 인 일정에 따라 조정해야하며 필요에 따라. 교정은 침전제와 잘에 bolus와 침전제 배치뿐만 아니라 제공 mesophase의 볼륨을 포함해야합니다. 물론, 가능한 보정 품질 관리 운동이 적용 기간에 실시한 시험에 사용되는 것과 유사한 볼륨과 재료를 사용하여 수행해야합니다.
보정만큼이나 중요 그래서 너무 재고 로봇 부품 및 소모품의 적절한 공급하는 데 문제가 있다는 것을 의미합니다. 치명적인와 예기치 않은 오류, 폐색과 충돌이 발생하고 작업을 수행 할 수 있습니다. 이러한 경우, 사용할 수있는 대체 침전제 배달 팁을 가지고 예를 들어, 매우 귀중한 막 단백질 준비가 그것을 정상적으로 사용되는 의미와 수낭비하지 않습니다.
로봇의 장점 중 일부는 본질적으로 끊임없이 노력하고 피로 '의 불평'이나 고통을하지 않는 것이라는 사실이 포함되어 있습니다. 로봇은 제어 조명 및 환경 조건 하에서, 이러한 어둠 속에서 인간 친화적으로 간주되지 않습니다 조건에 따라 사용 및 온도의 극단에서 할 수 있습니다. 이 문서에서 보여준 로봇은 모든 ~ 20 ° C.에서 주위 조건에서 사용되었습니다 그러나, 단백질 및 비 주변 온도, 제어 빛 11,12 및 산화 또는 감소 환경 13 필요 프로젝트가 있습니다. 이러한 모든 결정 로봇이 사용되는 상대적으로 쉽게와에 대한 취사 할 수 있습니다.
이전 주피터 비디오 글에서 우리는 meso 방법에 의한 결정화 실험을 수동으로 하나 설정하는 방법을 보여 주었다. 손으로 안정적으로 투여 할 수 mesophase의 최소 볼륨은 B 제한됩니다시련을 설정하는 사람의 Y 시력 시각과 꾸준한 handedness. 우리의 경험에서, 100 NL의 낮은 mesophase의 볼륨은 쉽게 처리됩니다. 우리는 기본 볼륨 40 NL에 관한 수동으로 투여 실험실 하나 알고 있습니다. 그러나, 상당히 작은 볼륨은 로봇을 사용하여 가능합니다. 이와는 별도로, 우리는 550 picoliters의 낮은 mesophase 볼륨 robotically 14 투여 할 수 있습니다 것으로 나타났습니다. 그 작품에서 로봇 별도의 소형화가 구현하는 경우, 결정화 시험을 수행하기 위해 필요한 가치있는 막 단백질의 양에 큰 감소로 이어질 것이라고하는 것이 가능하다는 것을 분명했습니다.
이 비디오 문서에서는 세 상업적으로 이용 가능한 로봇 lipidic mesophases을 사용하여 높은 처리량 막 단백질 결정을 설명하는 데 사용되었습니다. 이 중 첫 번째로 목성 1,712 1에서 설명 수동으로 시련을 설정하는 경험을 바탕으로 MS & FB 그룹에서 개발되었습니다. 이 instru입니다ment 우리와 함께 대부분의 정통을 가지고 현재 기사의 일괄의 사용에 전념하고 있습니다. 다른 두 로봇은 문서가 작성된 및 관련 영상이 완성도의 이익에 여기에 포함되어있는 시간에 MS & FB 그룹의 시범에 있었다. 세 로봇은 매우 동일한 mesophase 분배 시스템, 긍정적 인 변위 유리 주사기 5,7 인의 필수 기능을 사용합니다. 그들은 침전제 공급에 관한 가장 크게 다릅니다. 로봇 1과 2는 8 우물, 한 번에 결정 플레이트에 하나의 칼럼으로 동시에 침전제을 투여 할 수 있습니다. 반면, 로봇 3 하나의 행동의 모든 96 침전제 솔루션을 dispenses. 로봇 2 일회용 침전제 분배 팁 유일한 악기입니다. 특정 응용 프로그램에 따라 다른 악기와 관련된 찬반 양론이 있습니다;이 여기에 정교되지 않습니다. 그 세 가지 일을 말하면 나 같은 결정을 생산했습니다meso 방법에 의한 mbrane 단백질.
macromolecular의 결정학에 의해 구조 결정의 전체 프로세스의 다음 단계는 수확과 cryo-시원한 결정이 동영상을 문서에 설명 된대로 설정 접시에서하고 기록 그들과 과정을 X-선 회절에 있습니다. 이 항목은이 시리즈 1,15의 별도의 주피터 기사에서 다루고 있습니다.
Disclosures
관심 없음 충돌이 선언 없습니다.
Acknowledgments
이 작품에 공헌하고 대부분의 구조 막 및 기능 생물학 그룹, 과거와 현재 회원 모두에서 많은 사람이 있습니다. 모든 우리는 우리의 따뜻한 감사와 감사를 확장합니다. 이 작품은 과학 재단 (NSF) 아일랜드 (07/IN.1/B1836), 국립 보건원 (GM75915, P50GM073210 및 U54GM094599) 및 FP7 COST 액션 CM0902에서 교부금의 일부를 지원했다.
Materials
| Name | Company | Catalog Number | Comments |
| Brayer (roller) | Fisher Scientific | 50820937 | Tool |
| Gas-tight syringes | Hamilton | 81030 | Tool |
| Glass coverslips | Marienfeld | 01029990911 | Disposable |
| Glass plates | Marienfeld | 1527127092 | Disposable |
| Gryphon LCP Robot | Art Robbins | NA | Tool |
| In meso robot | Anachem/Gilson | NA | Tool |
| Lab notebook | Various | NA | Tool |
| Mosquito LCP Robot | TTP Labtech | NA | Tool |
| Perforated double-stick spacer tape | Saunders Corporation (hole-punched) | customized | Disposable |
| Precipitant solutions | Various | Various | Reagent |
| Purified water | Millipore | NA | Reagent |
| Rain-X | Shell Car Care | 80199200 | Reagent |
| Syringe tips | Hamilton | 7770-020 (gauge 22) | Tool |
| Tissues | Various | Various | Disposable |
| Water bottle | various | NA | Reagent |
References
- Caffrey, M., Porter, C. Crystallizing membrane proteins for structure determination using lipidic mesophases. J. Vis. Exp. (45), e1712 (2010).
- Cherezov, V., Caffrey, M. Nano-volume plates with excellent optical properties for fast, inexpensive crystallization screening of membrane proteins. J. Appl. Crystallogr. 36, 1372-1377 (2003).
- Caffrey, M., Cherezov, V. Crystallizing membrane proteins using lipidic mesophases. Nat. Protocols. 4, 706-731 (2009).
- Liu, W., Cherezov, V. Crystallization of membrane proteins in lipidic mesophases. J. Vis. Exp. (49), e2501 (2011).
- Cherezov, V., Peddi, A., Muthusubramaniam, L., Zheng, Y. F., Caffrey, M. A robotic system for crystallizing membrane and soluble proteins in lipidic mesophases. Acta Crystallogr. D Bio.l Crystallogr. 60, 1795-1807 (2004).
- Peddi, A. High-throughput automated system for crystallizing membrane proteins in lipidic mesophases. IEEE Trans. Autom. Sci. Eng. 4, 129-140 (2007).
- Cheng, A., Hummel, B., Qiu, H., Caffrey, M. A simple mechanical mixer for small viscous lipid-containing samples. Chem. Phys. Lipids. 95, 11-21 (1998).
- Caffrey, M. Crystallizing membrane proteins for structure-function studies using lipidic mesophases. Biochem. Soc. Trans. 39, 725-732 (2011).
- Caffrey, M. Crystallizing membrane proteins for structure determination: use of lipidic mesophases. Annu. Rev. Biophys. 38, 29-51 (2009).
- Caffrey, M. Membrane protein crystallization. J. Struct. Biol. 142, 108-132 (2003).
- Gushchin, I., Reshetnyak, A., Borshchevskiy, V., Ishchenko, A., Round, E., Grudinin, S., Engelhard, M., Buldt, G., Gordeliy, V. Active State of Sensory Rhodopsin II: Structural Determinants for Signal Transfer and Proton Pumping. J. Mol. Biol. 412, 591-600 (2011).
- Jordan, P., Fromme, P., Witt, H. T., Klukas, O., Saenger, W., Krauss, N. Three-dimensional structure of cyanobacterial photosystem I at 2.5 angstrom resolution. Nature. 411, 909-917 (2001).
- Grawert, T., Span, I., Eisenreich, W., Rohdich, F., Eppinger, J., Bacher, A., Groll, M. Probing the reaction mechanism of IspH protein by x-ray structure analysis. Proc. Natl. Acad. Sci. USA. 107, 1077-1081 (2010).
- Cherezov, V., Caffrey, M. Picolitre-scale crystallization of membrane proteins. J. Appl. Crystallogr. 39, 604-606 (2006).
- Li, D., Boland, C., Aragao, D., Walsh, K., Caffrey, M. Harvesting and cryo-cooling crystals of membrane proteins grown in lipidic mesophases for structure determination by macromolecular crystallography. J. Vis. Exp. (67), e4001 (2012).
