

Summary
के साथ साथ संरचना macromolecular क्रि एक्स - रे का उपयोग कर निर्धारण में उपयोग के लिए lipidic mesophases में उच्च throughput झिल्ली प्रोटीन के crystallization के लिए एक रोबोट दृष्टिकोण वर्णित है. तीन चिपचिपा और चिपचिपा प्रोटीन से लदी विधि का अभिन्न अंग mesophase से निपटने में सक्षम रोबोट पेश कर रहे हैं.
Protocol
1. Crystallization प्लेट की तैयारी
की स्थापना के लिए एक crystallization परीक्षण robotically कर कांच सैंडविच crystallization प्लेट (2 चित्रा), 2 संदर्भ में विस्तार से वर्णित की बेस प्लेट की तैयारी के साथ शुरू होता है. बेस प्लेट 1 और silanized जाना चाहिए छिद्रित स्पेसर डबल छड़ी है कि कुओं बनाता है, थाली करने के लिए लागू किया जाना चाहिए. इस के लिए आवश्यक सामग्री और आपूर्ति सामग्री के तहत अलग - अलग उल्लेख किया जाता है.
- एक कागज तौलिया पर प्लेट रखें, समाधान silanizing की कुछ बूँदें लागू करते हैं और यह एक पेपर ऊतकों के साथ थाली की सतह पर समान रूप से वितरित.
- पानी की एक बीकर में थाली डुबो के द्वारा अतिरिक्त silanizing समाधान निकालें.
- प्लेट बीकर से बाहर ले जाओ, यह एक सूखी कागज तौलिया, silanized पक्ष पर जगह है, और एक कागज तौलिया के साथ हल्के पोंछते द्वारा उजागर सतह सूखी.
- छेदा, स्पेसर डबल छड़ी पर सुरक्षा कवर छीलकरऔर स्पेसर, चिपचिपा पक्ष लागू नीचे, सूखा, ग्लास प्लेट के silanized सतह. सुनिश्चित करें कि है कि स्पेसर ठीक बेस प्लेट पर तैनात है, ऊपरी बाएँ हाथ कोने और स्पेसर का दो आसन्न पक्षों और प्लेट, संपाती.
- एक रोलर या brayer का उपयोग करने के लिए बेस प्लेट पर स्पेसर समतल और उन दोनों के बीच एक तंग सील बनाने.
पूर्व इकट्ठे प्लेटें व्यावसायिक रूप से उपलब्ध हैं (HR3-151, Hampton अनुसंधान; MD11-55-100, आण्विक आयाम, और LCP96T - UVP70U, Swissci). लागत के कारणों के लिए, हम ऊपर प्रोटोकॉल का पालन करने के लिए अपने स्वयं के प्लेटों को इकट्ठा करने के लिए पसंद करते हैं.
2 में Meso रोबोट 1
meso रोबोट में पहली बार इस वीडियो लेख में प्रदर्शन किया एमएस और अमेरिकन प्लान समूह (3 चित्रा) में वर्तमान में उपयोग में एक है. रोबोट का पूर्ण विवरण सामग्री के तहत और संदर्भ खंड 5 में पाया जा सकता है. सामग्री और equipmeNT करने के लिए एक crystallization रोबोट का उपयोग कर रहे हैं माल के तहत अलग अलग रखा परीक्षण की स्थापना की आवश्यकता है.
- रोबोट के डेक पर धारा 1 में तैयार स्पेसर के साथ बेस प्लेट रखें. यह बेस प्लेट संरेखण के प्रयोजनों के लिए अच्छी तरह से पदों के साथ अपने स्वयं के मंच के रूप में चिह्नित है. प्लेट पहचान प्रयोजनों के लिए लेबल किया जाना चाहिए.
- Crystallization प्लेट के बगल में रोबोट के डेक पर अपने स्वयं के मंच में 96 अच्छी तरह तेज़ ब्लॉक सुरक्षित.
- प्लास्टिक सील टोपी छीलने द्वारा ब्लॉक सावधानी से खोलें.
- Humidifier पर मुड़ें और प्रत्यक्ष और भर में रोबोट के डेक पर बेस प्लेट आर्द्र हवा की धारा. humidifier शीघ्र समाधान के वाष्पीकरण को कम करने और crystallization 5 थाली भर reproducibility बढ़ाने के लिए दिखाया गया है. यह पूर्व पर दिया जा सकता है करने के लिए सेट अप क्षेत्र पूर्व गीला है जब परिवेश सापेक्ष नमी कम है, या अन्यथा, बस से पहले mesophase का वितरण शुरू.
- इनिशियलाइज़ रोबोट निर्माता के निर्देशों का पालन. साधन विशिष्ट निर्देश यहाँ किसी भी विस्तार से वर्णित नहीं किया जा सकता है क्योंकि सटीक प्रक्रियाओं समय के साथ बदल जाएगा. मूलतः, आरंभ करने के दौरान के दौरान क्या होता है कि रोबोट पर हाथ वितरण mesophase तीन orthogonal दिशाओं में एक्स, वाई और जेड संदर्भ पदों के साथ प्रदान की जाती है
- प्रोटीन से लदी एक हैमिल्टन सिरिंज में mesophase संलग्न, सुई वितरण रोबोट की 1 शाखा (3 चित्रा) के साथ पूरा हो गया है. कैसे mesophase और कैसे तैयार करने के लिए यह सिरिंज में लोड का पूर्ण विवरण 3,7-10 संदर्भ में वर्णित किया गया है.
- Crystallization बेस प्लेट पर स्पेसर से निकालें ऊपरी सुरक्षा कवर और बेस प्लेट मंच पर fiducials के साथ प्लेट पर कुओं संरेखित करें. ध्यान दें, इस वीडियो के उद्देश्य के लिए, सुरक्षा कवर जगह में छोड़ दिया गया था संरेखण चरण के दौरान दर्शक सहायता.
- वितरण syring की सुई टिप संरेखित करेंऊपरवाला crystallization प्लेट (खैर A1) के बाएँ हाथ कोने में अच्छी तरह से नीचे के साथ ई. यह आंख या वितरण बांह की ऊंचाई समायोजन Z समन्वय करते हुए देख कैसे पास सुई टिप अच्छी तरह से नीचे आता है के द्वारा किया जाता है. यही टिप सिर्फ अच्छी तरह से नीचे को छू रहा है पक्ष की ओर से मंच पर कभी तो थोड़ा whilst वितरण बांह की ऊंचाई को समायोजित करने के लिए थाली हिल द्वारा न्याय किया जा सकता है.
- वितरण जहां टिप संपर्कों प्लेट हाथ के कंप्यूटर में z-निर्देशांक दर्ज करें. वितरण z-स्थिति जो बेस प्लेट की सतह से मेल खाती इस संदर्भ से 80 micrometers सुई टिप के साथ जगह लेने के लिए क्रमादेशित है.
- खैर A1 के केंद्र में सुई की नोक आंखों से स्थिति. स्टोर में नियंत्रित कंप्यूटर संदर्भ एक्स, Y निर्देशांक वितरण हाथ जहां टिप केंद्रित है. इस समन्वय के लिए शेष कुओं की थाली पर केंद्र को परिभाषित करने के लिए प्रयोग किया जाता है.
- पीआरime सिरिंज रोबोट कंप्यूटर पर उचित आदेश का उपयोग करने के लिए है कि ताजा mesophase सुनिश्चित वितरण और पहले और बाद कुओं उनके mesophase की पूर्ण पूरक प्राप्त कि सुई भरता है. एक ऊतक के साथ सुई की नोक पर बंद extruded mesophase पोछो.
- भागो रोबोट (एक्स - एपी) कार्यक्रम शुरू करने के लिए कदम है, जहां 2 रोबोट की शाखा पर शीघ्र वितरण सुझावों धो रहे हैं और तेज़ ब्लॉक से समाधान निकालना तैयार निस्तब्धता के एक दौर आरंभ.
- गति में प्रोटीन से लदी (आमतौर पर 50 nl) 1 mesophase, एक समय में आठ कुओं की एक स्तंभ, शीघ्र समाधान (आमतौर पर 800 nl) द्वारा पीछा के साथ कुओं की अनुक्रमिक लोड सेट करने के लिए रोबोट पर समारोह बांटना. सक्रिय करें लोड हो रहा स्तंभों के बीच, mesophase वितरण एक पार्किंग की स्थिति जहां सुई के अंत में रखा है हाथ स्पंज सिक्त नोक पर बाहर सुखाने से mesophase को रोकने के. वितरण mesophase और तेज़ की प्रक्रिया को दोहराया हैथाली भर में 11 बार तक थाली भर जाता है. mesophase और तेज़ के साथ एक 96 अच्छी तरह से थाली की लोडिंग पूरा करने के लिए 5 मिनट लगते हैं.
- जैसे ही थाली भरा है और रोबोट हथियार उनके पार्क पदों के लिए लौट आए हैं, रोबोट के डेक से थाली हटाने और यह एक फ्लैट ठोस सतह पर जगह.
- इसके तत्काल बाद, एक ढक्कन के साथ थाली सील करने के लिए अच्छी तरह संरचना में समय पर निर्भर परिवर्तन को कम करने के लिए. यह सुनिश्चित करना महत्वपूर्ण है कि सभी 96 कुओं को पूरी तरह से कवर किया जाता है, कि बेस प्लेट के साथ ढकना वर्ग गठबंधन किया है और आवरण - कांच की है कि कोई बेस प्लेट के निशान से परे फैली हुई है. एक रोलर या brayer एक तंग और आवरण - कांच और स्पेसर के बीच एक समान मुहर बनाने के लिए प्रयोग किया जाता है.
- प्लेट का निरीक्षण करने के लिए यकीन है कि सेट अप चला गया के रूप में यह चाहिए. एक के लिए लग रही है क्या एक प्रत्येक कुएं में उपस्थिति एक तवे पर तली अंडे है. तले हुए अंडे की जर्दी mesophase से मेल खाती है. अंडे की सफेदी तेज़ soluti हैपैन के किनारे पर और crystallization की परिधि को अच्छी तरह से है. आदर्श रूप में, तीन गाढ़ा हैं.
- एक तापमान नियंत्रित क्रिस्टल विकास के लिए भंडारण क्षेत्र में प्लेट रखें.
- अगर कोई अधिक प्लेटें स्थापित करने के लिए जा रहे हैं, रोबोट के डेक से तेज़ ब्लॉक निकालने के लिए, यह कसकर सील और यह भंडारण में वापस रख दिया.
- रोबोट का वितरण हाथ से mesophase युक्त सिरिंज निकालें, यह विघटित और वितरण सुई और सामी सहित उसके भागों, और अगले उपयोग के लिए तैयार करने में मेथनॉल सूखी के साथ सावधानी से धो.
3 में Meso रोबोट 2. मच्छर LCP
मच्छर LCP रोबोट (4 चित्रा) 1 रोबोट द्वारा प्रयोग किया जाता है कि एक इसी तरह mesophase मशीन शामिल हैं. 1 रोबोट के विपरीत, यह डिस्पोजेबल सुझावों के माध्यम से तेज़ dispenses. प्रोग्रामिंग सॉफ्टवेयर करने के लिए साधन स्थापित विशेष crystallization प्लेटें और precipit के साथ काम करने के लिए प्रयोग किया जाता हैचींटी ब्लॉक, और एक निर्दिष्ट अनुक्रम में mesophase और तेज़ की प्रयोक्ता परिभाषित संस्करणों बांटना. इस तरह के विवरण के निर्माता द्वारा प्रदान कर रहे हैं और यहाँ से वर्णित नहीं किया जा जाएगा.
- हैमिल्टन सिरिंज, सुई के साथ पूरा और प्रोटीन से लदी mesophase साथ भरा है, के रूप में रोबोट के तहत 1 और जौव 1712 लेख 1 में ऊपर वर्णित तैयार.
- रोबोट का वितरण बांह पर स्थिति में सिरिंज क्लैंप करें.
- डेक का उपयोग लेजर सेंसर घुड़सवार एक्स और वितरण सिरिंज पर सुई के वाई निर्देशांक स्थापित. यह एक महत्वपूर्ण करने के लिए सुनिश्चित करें कि mesophase सही प्रत्येक अच्छी तरह से केंद्र में थाली पर तिरस्कृत करने के लिए आवश्यक कदम है.
- नियंत्रण कक्ष पर एक बटन के स्पर्श के साथ प्रधानमंत्री सिरिंज सुई से mesophase निष्कासित करने. रोबोट का उपयोग करने के लिए कुओं लोड करने के लिए तैयार करने में एक ऊतक के साथ सुई टिप से extruded mesophase निकालें.
- रोबोट नम के डेक पर crystallization प्लेट रखने से पहलेपानी की कुछ बूंदों के साथ मंच मदद केशिकत्व द्वारा जगह में थाली पकड़ की सतह एन.
- कांच बेस प्लेट पर स्पेसर से सुरक्षा कवर निकालें और इसकी मजबूती के मंच के लिए अच्छा पालन सुनिश्चित करने पर जगह है. मंच पर तीन fiducials का उपयोग करने के लिए 3 कोने जिससे वितरण सुई टिप करने के लिए सम्मान के साथ प्लेट पर कुओं की उचित स्थिति सुनिश्चित करने के कुओं पंक्ति. साधन अब एक वितरण चक्र में प्रवेश करने की आज्ञा दी है.
- चक्र जहां mesophase एक छोटा गिलास प्लेट पर तिरस्कृत है पर चलती ताजा mesophase साथ कुओं लोड से पहले तुरंत एक 2 भड़काना कदम के साथ शुरू होता है. 8 कुओं की थाली पर एक ऊर्ध्वाधर कॉलम mesophase साथ रोबोट 1 लोड और फिर डिस्पोजेबल mesophase सांस के शीर्ष पर शीघ्र समाधान के बग़ैर सुझावों का उपयोग करता है. प्रक्रिया प्लेट की लंबाई के साथ 11 बार दोहराया जाता है जब तक सभी कुओं भर रहे हैं. पूरी प्रक्रिया के बारे में 5 मिनट लगते हैं पूरा करने के लिए.
- हटानारोबोट के मंच से भरी थाली और यह एक ढक्कन के साथ सील के रूप में रोबोट 1 के तहत ऊपर वर्णित है.
- प्लेट ठीक से लेबल, क्रिस्टल के विकास के लिए एक तापमान नियंत्रित वातावरण में रखें.
4 में Meso रोबोट 3. Gryphon LCP
Gryphon LCP रोबोट (5 चित्रा) एक समान mesophase वितरण प्रणाली के लिए है कि रोबोटों 1 और 2 के लिए ऊपर वर्णित शामिल हैं. क्या यह अन्य दो से अलग है कि सभी 96 तेज़ समाधान तिरस्कृत एक साथ कर रहे हैं.
- प्रोटीन से लदी mesophase तैयार है और यह वितरण सिरिंज में लोड, जैसा कि ऊपर वर्णित रोबोटों 1 और 2 के तहत, और जौव लेख में 1712 1.
- रोबोट का वितरण बांह पर स्थिति में सिरिंज क्लैंप करें.
- रोबोट के डेक पर शीघ्र समाधान ब्लॉक और crystallization प्लेट रखें.
- 96-टिप hea लोडशीघ्र समाधान के साथ घ. एक उपयोगकर्ता परिभाषित देरी समय चिपचिपा precipitants aspirating की सुविधा प्रदान की जाती है.
- साधन कमान एक वितरण चक्र में प्रवेश. चक्र mesophase क्रमिक रूप से 96 कुओं में एक प्रक्रिया है कि 1 के बारे में पूरा करने के लिए मिनट लगते में तिरस्कृत किया जा रहा है के साथ शुरू होता है. सिर 96-टिप तो सभी 96 तेज़ समाधान crystallization कुओं में mesophase boluses के शीर्ष पर एक बार में dispenses. पूरी थाली लदान प्रक्रिया 2 मिनट में समाप्त हो गया है.
- रोबोट के मंच से भरी थाली निकालें और यह एक ढक्कन के साथ सील के रूप में रोबोट 1 के तहत ऊपर वर्णित.
- प्लेट ठीक से लेबल, क्रिस्टल के विकास के लिए एक तापमान नियंत्रित वातावरण में रखें.
5. प्रतिनिधि परिणाम
इस वीडियो लेख का उद्देश्य के लिए प्रदर्शन कैसे स्थापित करने के लिए स्वतः एक चिपचिपा, झिल्ली प्रोटीन से लदी कांच sandwic में mesophase साथ crystallization परीक्षणोंघंटे 96-अच्छी तरह से crystallization प्लेटें. रोबोट में विशेष है कि कम से कम मैनुअल हस्तक्षेप की आवश्यकता के प्रयोग के माध्यम से स्वचालन पर जोर है. Reproducibility और mesophase और तेज़ तिरस्कृत और अच्छी तरह के भीतर दोनों के स्थान की मात्रा के संदर्भ में सटीक, जब एक रोबोट का इस्तेमाल किया जाता है की उम्मीद कर रहे हैं. ये स्थिति है कि crystallogenesis समर्थन के प्रभावी प्रदर्शन के देखने के बिंदु से महत्वपूर्ण हैं. उन्होंने यह भी विश्लेषण पाइपलाइन जो इमेजिंग उपकरणों के साथ क्रिस्टल अक्सर किया विकास का मूल्यांकन में अगले कदम के लिए महत्वपूर्ण हैं. ड्रॉप या सांस स्थान इमेजिंग प्रक्रिया के लिए महत्वपूर्ण है, और अच्छी तरह से में सांस की अनियमित और अनुचित स्थान आमतौर पर उपयोगकर्ता के हस्तक्षेप की आवश्यकता के लिए सही और समय लगता है. चित्रण के प्रयोजनों के लिए ठीक है और अनुचित तरीके से भरा हुआ प्लेटों के उदाहरण चित्रा 6 में दिखाए जाते हैं.
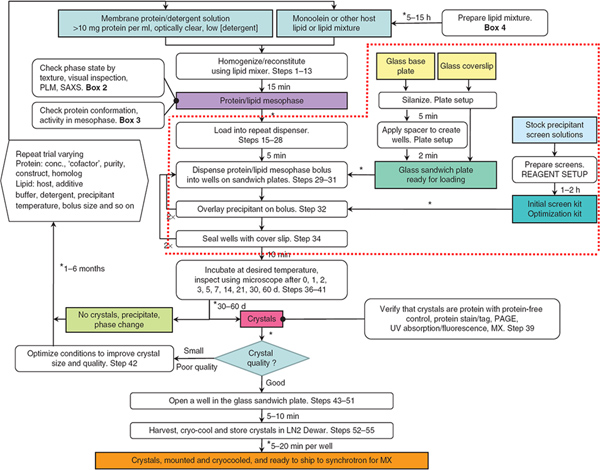
चित्रा 1. फ्लोचार्ट उत्पादन, कटाई, और meso हो झिल्ली प्रोटीन क्रिस्टल में क्रायो - ठंडा में शामिल चरणों का सार है. धराशायी लाल रेखा से घिरा हुआ कदम इस जौव लेख के ध्यान केंद्रित कर रहे हैं. रोबोट को 29-32 चरणों में mesophase और शीघ्र समाधान वितरित करने के लिए इस्तेमाल किया गया. 3 संदर्भ से बड़ा आंकड़ा देखने के लिए यहां क्लिक करें .

चित्रा 2 एक पूरी तरह से भरा हुआ है और सील 96-अच्छी तरह से कांच सैंडविच crystallization थाली. हर अच्छी तरह से 50 nl घन चरण और 1 μl शीघ्र समाधान शामिल हैं. स्पष्टता के लिए, घन चरण सूडान लाल के साथ किया गया दाग और शीघ्र समाधान Methylene ब्लू शामिल हैं. संदर्भ से 5.
_upload/4000/4000fig3.jpg "alt =" चित्रा 3 "/>
चित्रा 3 meso रोबोट (1 रोबोट) में. रोबोट दो हथियार है. 1 शाखा प्रोटीन से लदी lipidic mesophase dispenses. 2 शाखा शीघ्र समाधान dispenses. भरने के दौरान, 96-अच्छी तरह से थाली रोबोट जो खुद को स्थिर है के डेक पर स्थिति में तय रहता है. दो हथियार mesophase और शीघ्र समाधान देने के लिए चलते हैं. संदर्भ से 3.

चित्रा 4 मच्छर LCP रोबोट (2 रोबोट). 1 रोबोट, मच्छर LCP के डेक, जिस पर 96-अच्छी तरह से थाली और शीघ्र समाधान ब्लॉक बैठते के विपरीत, क्षैतिज रूप से भरने के दौरान चलता है.

चित्रा 5 Gryphon LCP रोबोट (3 रोबोट). एक के दौरानसेट, lipidic घन चरण दवासाज़ 96 अच्छी तरह से थाली पर प्रोटीन से लदी mesophase देने चाल है. डेक तो क्षैतिज अनुवाद शीघ्र समाधान टिप सिर के तहत थाली की स्थिति है. एक साथ सभी 96 तेज़ समाधान तिरस्कृत कर रहे हैं. चित्र (निर्माता से sourced http://www.artrobbins.com/ ) और लेबल.

चित्रा 6 पूरी तरह से भरी हुई है और सील 96-अच्छी तरह से कांच सैंडविच प्लेट (ए) और कुओं. ठीक (बी) और अनुचित तरीके से (सी, डी) meso रोबोट (1 रोबोट) में उपयोग कर भरा है. में थाली पर बार कोड लेबल एक प्लेट युक्ति / इनक्यूबेटर इमेजिंग में थाली को ट्रैक करने के लिए प्रयोग किया जाता है. पैनल में बी.डी., शीघ्र समाधान और mesophase पी और एम, क्रमशः के रूप में चिह्नित कर रहे हैं. उम्मीद तवे पर तली अंडेबी में अच्छी तरह से की उपस्थिति एक ठीक से भरी हुई है और अच्छी तरह से सील की विशेषता है. सी में, तेज़ एक ऑफ सेंटर स्थिति में किया गया है में अच्छी तरह से अनुचित तरीके से तिरस्कृत और स्पेसर के साथ संपर्क में आते हैं. सी में, यह भी दिखाई कि mesophase की मात्रा कम से कम होना चाहिए है. शीघ्र समाधान के साथ अधूरा लोड का एक उदाहरण डी. में बड़े पैमाने के लिए दिखाया गया है, सभी कुओं का व्यास 6 मिमी है.
Discussion
हम लेख में इस वीडियो का प्रदर्शन किया है कि कैसे एक रोबोट का उपयोग करने के लिए स्वचालित रूप से meso crystallization परीक्षणों में 96 अच्छी तरह से कांच सैंडविच प्लेटों का उपयोग करते हुए एक प्रोटीन से लदी lipidic mesophase में सेट. विशेष रूप से इस काम में इस्तेमाल रोबोट चिपचिपा और चिपचिपा mesophase nanoliter की मात्रा का सटीक और प्रतिलिपि प्रस्तुत करने योग्य वितरण के लिए एक सकारात्मक विस्थापन ग्लास सिरिंज में शामिल हैं, के रूप में मूल रूप से 7 वर्णित करने के लिए डिजाइन किए गए थे.
सटीकता और परिशुद्धता एक रोबोट की महत्वपूर्ण विशेषताएं हैं. हालांकि, इन विशेषताओं के रूप में ही डिग्री और नियमितता जो रोबोट के प्रदर्शन का मूल्यांकन किया है और अंशांकन किया जाता है के रूप में अच्छा कर रहे हैं. यह कह रही है कि रोबोट का प्रदर्शन करते हुए व्यक्तिगत प्लेटों स्थापना की जा रही मूल्यांकन किया जाना चाहिए बिना चला जाता है. यह करने के लिए लगता है कि रोबोट flawlessly समारोह और रोबोट छोड़ने के लिए पहुंच से बाहर चलाने के लिए उपयुक्त नहीं है. चौकस और चौकस ऑपरेटर एक स्थिति में होना चाहिएition एक ध्वनि या एक स्वरूप है जब कुछ ठीक से काम नहीं कर रहा है और इसे तुरंत सही से ध्यान दें. इसके अतिरिक्त, एक थाली ध्यान अच्छी तरह से सामग्री की एकरूपता के लिए किया जाना चाहिए के रूप में जल्द ही आंखों से थाली के रूप में सील है का निरीक्षण किया और इससे पहले कि इसे दूर crystallization परीक्षण के लिए डाल दिया है. यह केवल कुछ सेकंड के प्रदर्शन करने के लिए किया जा सकता है, जबकि अगले प्लेट लोड किया जा रहा है की आवश्यकता होती है चाहिए. देख, उदाहरण के लिए, विशेष कुओं ठीक से नहीं भर रहे हैं कि तथ्य यह है कि एक निश्चित तेज़ वितरण टिप खराब रहता है उजागर कर सकते हैं. के mesophase की डिलीवरी अनियमित हो देखा जाना चाहिए, प्रासंगिक दोषपूर्ण आइटम के लिए तुरंत सुधारा जा आवश्यकता होगी. इन मुद्दों टिप्पण और सेट के दौरान प्रासंगिक समायोजन करने बहुमूल्य लिपिड और झिल्ली प्रोटीन सहित समय और सामग्री को बचाने के लिए होगा. यदि एक imager के क्रिस्टल विकास को ट्रैक करने के लिए प्रयोग किया जाता है, सटीकता और परिशुद्धता भी इमेजिंग के दौरान नजर रखी जा सकता है. उदाहरण के लिए ड्रॉप या सांस के साथ, व्यवस्थित समस्याओंimager द्वारा स्थान से संकेत मिलता है कि कुछ ठीक नहीं है कि और प्रोटोकॉल में सुधारात्मक कार्रवाई कहीं नदी के ऊपर की जरूरत है कि.
इसलिए विश्वसनीय प्रदर्शन के हितों में रोबोट एक नियमित समय पर calibrated किया जाना चाहिए और के रूप में की जरूरत है. Calibrations तेज़ और mesophase में अच्छी तरह से सांस और तेज़ प्लेसमेंट के रूप में के रूप में अच्छी तरह से वितरित की मात्रा को शामिल करना चाहिए. जाहिर है, जहाँ भी संभव अंशांकन मात्रा और उन कि गुणवत्ता नियंत्रण व्यायाम द्वारा कवर की अवधि में किए गए परीक्षणों में इस्तेमाल किया जाएगा के लिए इसी तरह की सामग्री का उपयोग किया जाना चाहिए.
अंशांकन के रूप में इतना महत्वपूर्ण भी स्टॉक में रोबोट भागों और आपूर्ति की पर्याप्त आपूर्ति हो रही है. महासंकट और अप्रत्याशित विफलताओं, रुकावटों और दुर्घटनाओं होते हैं और कर सकते हैं. इस तरह की एक घटना में, एक प्रतिस्थापन तेज़ वितरण टिप, उदाहरण के लिए, मतलब है कि एक बहुत ही मूल्यवान झिल्ली प्रोटीन की तैयारी यह चाहिए के रूप में प्रयोग किया जाता है और हो सकता हैव्यर्थ नहीं है.
एक रोबोट के लाभ में से कुछ तथ्य यह है कि यह अनिवार्य रूप से लगातार काम और यह या थकान की शिकायत 'ग्रस्त नहीं है कि शामिल हैं. एक रोबोट भी अंधेरे में इस तरह के रूप में है कि मानव के अनुकूल नहीं माना जाता है शर्तों के तहत इस्तेमाल किया जा सकता है, नियंत्रित प्रकाश और पर्यावरणीय परिस्थितियों में, और तापमान के चरम पर है. इस लेख में प्रदर्शन रोबोट सब ~ 20 डिग्री सेल्सियस परिवेश की शर्तों के तहत इस्तेमाल किया गया हालांकि, प्रोटीन और परियोजनाओं है कि गैर परिवेश तापमान नियंत्रित प्रकाश 11,12 और एक ऑक्सीकरण या एक 13 पर्यावरण को कम करने की आवश्यकता है. इन सभी के लिए catered जा सकता, रिश्तेदार आसानी, जब एक crystallization रोबोट के साथ प्रयोग किया जाता है.
हम एक पहले जौव वीडियो लेख में प्रदर्शन कैसे meso विधि में से crystallization परीक्षण स्थापित कर रहे हैं 1 मैन्युअल. mesophase की न्यूनतम मात्रा है कि हाथ से मज़बूती से तिरस्कृत कर सकते हैं ख सीमित हैy परीक्षणों की स्थापना व्यक्ति के दृश्य तीक्ष्णता और स्थिर मनमानी. हमारे अनुभव में, mesophase की nl 100 के रूप में कम के रूप में संस्करणों को आसानी से नियंत्रित किया जाता है. हम एक प्रयोगशाला है जहां मूलभूत मात्रा मैन्युअल तिरस्कृत nl 40 के बारे में है के बारे में पता है. हालांकि, काफी छोटी मात्रा एक रोबोट का उपयोग संभव हो रहे हैं. अलग से, हम पता चला है कि 550 picoliters के रूप में कम के रूप में mesophase मात्रा 14 robotically समाप्त किया जा सकता है. उस काम से यह स्पष्ट हो गया है कि रोबोट द्वारा आगे miniaturization संभव है, जो अगर लागू किया, मूल्यवान झिल्ली एक crystallization परीक्षण के लिए बाहर ले जाने के के लिए आवश्यक प्रोटीन की मात्रा में एक बड़ी कमी के लिए नेतृत्व करेंगे.
इस वीडियो लेख में, तीन व्यावसायिक रूप से उपलब्ध रोबोट उच्च throughput झिल्ली प्रोटीन crystallization lipidic mesophases का उपयोग कर प्रदर्शित करने के लिए इस्तेमाल किया गया. इनमें से पहला एमएस और अमेरिकन प्लान हमारे अनुभव के आधार पर समूह की स्थापना परीक्षणों मैन्युअल, रूप में 1712 जौव 1 में वर्णित में विकसित किया गया था. यह वाद्य हैजाहिर है हम साथ सबसे परिचित है और वर्तमान लेख के थोक इसके उपयोग के लिए समर्पित है. अन्य दो रोबोट एमएस और समय पर लेख लिखा गया था और प्रासंगिक दृश्य यहाँ पूर्णता के हित में शामिल है अमेरिकन प्लान समूह में प्रदर्शन पर थे. सभी तीन रोबोटों बहुत ही mesophase वितरण प्रणाली, आवश्यक सुविधा है जो एक सकारात्मक विस्थापन कांच 5,7 सिरिंज का उपयोग करें. वे शीघ्र वितरण के संबंध में सबसे महत्वपूर्ण भिन्न होते हैं. रोबोट 1 और 2 तेज़ 8 कुओं, एक crystallization प्लेट पर एक समय में एक एकल स्तंभ में एक साथ वितरित कर सकते हैं. इसके विपरीत, 3 रोबोट एक एकल कार्रवाई में सभी 96 तेज़ समाधान dispenses. 2 रोबोट डिस्पोजेबल तेज़ वितरण सुझावों के साथ ही साधन है. पेशेवरों और विपक्ष के विभिन्न उपकरणों के साथ जुड़ा हुआ है कि विशेष रूप से आवेदन पर निर्भर कर रहे हैं, ये यहाँ पर सविस्तार नहीं जाएगा. इतना ही कहना है कि सभी तीन काम किया है और मुझे के क्रिस्टल का उत्पादनmeso विधि में द्वारा mbrane प्रोटीन.
macromolecular क्रिस्टलोग्राफी द्वारा संरचना निर्धारण की समग्र प्रक्रिया में अगले कदम के फसल के लिए और सेट अप के रूप में इस वीडियो लेख में वर्णित प्लेटों से क्रायो शांत क्रिस्टल और रिकॉर्ड और उन लोगों से एक्स - रे विवर्तन प्रक्रिया के लिए कर रहे हैं. इस श्रृंखला में 1,15 अलग जौव लेख में इन विषयों को कवर कर रहे हैं.
Disclosures
ब्याज की कोई संघर्ष की घोषणा की.
Acknowledgments
वहाँ कई जो इस काम के लिए योगदान दिया है और सबसे स्ट्रक्चरल झिल्ली और कार्यात्मक बायोलॉजी समूह, दोनों अतीत और वर्तमान सदस्यों से कर रहे हैं. हम सभी के लिए अपनी हार्दिक धन्यवाद और प्रशंसा का विस्तार. इस काम के हिस्से में विज्ञान फाउंडेशन (07/IN.1/B1836) आयरलैंड, स्वास्थ्य के राष्ट्रीय संस्थान (P50GM073210 GM75915, और U54GM094599), और FP7 लागत लड़ाई CM0902 से अनुदान द्वारा समर्थित किया गया.
Materials
| Name | Company | Catalog Number | Comments |
| Brayer (roller) | Fisher Scientific | 50820937 | Tool |
| Gas-tight syringes | Hamilton | 81030 | Tool |
| Glass coverslips | Marienfeld | 01029990911 | Disposable |
| Glass plates | Marienfeld | 1527127092 | Disposable |
| Gryphon LCP Robot | Art Robbins | NA | Tool |
| In meso robot | Anachem/Gilson | NA | Tool |
| Lab notebook | Various | NA | Tool |
| Mosquito LCP Robot | TTP Labtech | NA | Tool |
| Perforated double-stick spacer tape | Saunders Corporation (hole-punched) | customized | Disposable |
| Precipitant solutions | Various | Various | Reagent |
| Purified water | Millipore | NA | Reagent |
| Rain-X | Shell Car Care | 80199200 | Reagent |
| Syringe tips | Hamilton | 7770-020 (gauge 22) | Tool |
| Tissues | Various | Various | Disposable |
| Water bottle | various | NA | Reagent |
References
- Caffrey, M., Porter, C. Crystallizing membrane proteins for structure determination using lipidic mesophases. J. Vis. Exp. (45), e1712 (2010).
- Cherezov, V., Caffrey, M. Nano-volume plates with excellent optical properties for fast, inexpensive crystallization screening of membrane proteins. J. Appl. Crystallogr. 36, 1372-1377 (2003).
- Caffrey, M., Cherezov, V. Crystallizing membrane proteins using lipidic mesophases. Nat. Protocols. 4, 706-731 (2009).
- Liu, W., Cherezov, V. Crystallization of membrane proteins in lipidic mesophases. J. Vis. Exp. (49), e2501 (2011).
- Cherezov, V., Peddi, A., Muthusubramaniam, L., Zheng, Y. F., Caffrey, M. A robotic system for crystallizing membrane and soluble proteins in lipidic mesophases. Acta Crystallogr. D Bio.l Crystallogr. 60, 1795-1807 (2004).
- Peddi, A. High-throughput automated system for crystallizing membrane proteins in lipidic mesophases. IEEE Trans. Autom. Sci. Eng. 4, 129-140 (2007).
- Cheng, A., Hummel, B., Qiu, H., Caffrey, M. A simple mechanical mixer for small viscous lipid-containing samples. Chem. Phys. Lipids. 95, 11-21 (1998).
- Caffrey, M. Crystallizing membrane proteins for structure-function studies using lipidic mesophases. Biochem. Soc. Trans. 39, 725-732 (2011).
- Caffrey, M. Crystallizing membrane proteins for structure determination: use of lipidic mesophases. Annu. Rev. Biophys. 38, 29-51 (2009).
- Caffrey, M. Membrane protein crystallization. J. Struct. Biol. 142, 108-132 (2003).
- Gushchin, I., Reshetnyak, A., Borshchevskiy, V., Ishchenko, A., Round, E., Grudinin, S., Engelhard, M., Buldt, G., Gordeliy, V. Active State of Sensory Rhodopsin II: Structural Determinants for Signal Transfer and Proton Pumping. J. Mol. Biol. 412, 591-600 (2011).
- Jordan, P., Fromme, P., Witt, H. T., Klukas, O., Saenger, W., Krauss, N. Three-dimensional structure of cyanobacterial photosystem I at 2.5 angstrom resolution. Nature. 411, 909-917 (2001).
- Grawert, T., Span, I., Eisenreich, W., Rohdich, F., Eppinger, J., Bacher, A., Groll, M. Probing the reaction mechanism of IspH protein by x-ray structure analysis. Proc. Natl. Acad. Sci. USA. 107, 1077-1081 (2010).
- Cherezov, V., Caffrey, M. Picolitre-scale crystallization of membrane proteins. J. Appl. Crystallogr. 39, 604-606 (2006).
- Li, D., Boland, C., Aragao, D., Walsh, K., Caffrey, M. Harvesting and cryo-cooling crystals of membrane proteins grown in lipidic mesophases for structure determination by macromolecular crystallography. J. Vis. Exp. (67), e4001 (2012).
