

Summary
Qui è descritto un approccio robotico per alta produttività cristallizzazione di proteine di membrana in mesofasi lipidici destinati determinazione della struttura macromolecolare usando cristallografia a raggi X. Tre robot capaci di gestire la viscoso e appiccicoso proteina-carico mesofase solidale al metodo vengono introdotti.
Abstract
Studi struttura-funzione di proteine di membrana grande beneficio da avere disponibili ad alta risoluzione strutture 3-D del tipo dotato macromolecolare tramite cristallografia a raggi X (MX). Un ingrediente essenziale di MX è un rifornimento costante di diffrazione idealmente qualità cristalli. Il meso o in fase lipidica cubica (LCP) metodo per cristallizzare proteine di membrana è uno dei diversi metodi disponibili per cristallizzare proteine di membrana. Si fa uso di una mesofase bicontinue in cui crescere cristalli. Come metodo, ha avuto alcuni successi spettacolari in ritardo e ha attirato molta attenzione con i gruppi di ricerca ormai da molti interessati ad utilizzarlo. Una delle sfide connesse con il metodo è che il mesofase hosting è estremamente viscoso e appiccicoso, che ricorda un dentifricio di spessore. Quindi, erogazione manualmente in modo riproducibile in piccoli volumi in pozzi di cristallizzazione richiede abilità, pazienza e una mano ferma. Un protocollo per fare just che è stato sviluppato nel Membrane Strutturale e Funzionale Biologia (MS & FB) Gruppo 1-3. Video Articoli Giove che descrivono il metodo sono disponibili 1,4.
L'approccio manuale a creare in meso studi presenta evidenti vantaggi con applicazioni speciali, quali l'ottimizzazione cristallo e derivatizzazione. Ha, tuttavia soffre di essere un metodo con bassa produttività. Qui, dimostriamo un protocollo per l'esecuzione di prove di cristallizzazione in meso robot. Un robot offre i vantaggi di velocità, accuratezza, precisione, miniaturizzazione e la possibilità di lavorare in continuo per lunghi periodi in quello che potrebbe essere considerato come condizioni ostili come al buio, in una atmosfera riducente o a temperature basse o alte. Un robot in meso, se usato correttamente, può migliorare notevolmente la produttività della struttura della membrana proteica e funzione di ricerca facilitando cristallizzazione, che è uno dei passi lenti nellacomplessiva struttura a pipeline determinazione.
In questo articolo video, viene illustrato l'utilizzo di tre robot disponibili in commercio in grado di dispensare la mesofase viscoso e appiccicoso integrale al crystallogenesis meso. Il primo robot è stato sviluppato in MS e FB Group 5,6. Gli altri due sono stati recentemente resi disponibili e sono inclusi per completezza.
Una panoramica del protocollo in questo articolo è presentato in figura 1. Tutte le operazioni sono state effettuate a temperatura ambiente (~ 20 ° C) in condizioni ambiente.
Protocol
1. Preparazione della piastra di cristallizzazione
Impostazione di fare un processo di cristallizzazione robot inizia con la preparazione della piastra di base della piastra di cristallizzazione vetro sandwich (Figura 2), descritti in dettaglio in riferimento 2. La piastra di base deve prima essere silanizzata e il perforato doppio bastone distanziatore che crea i pozzetti, deve essere applicata alla piastra. I materiali e le forniture necessarie per questo sono dettagliati in Materiali.
- Posizionare la piastra su un tovagliolo di carta, applicare alcune gocce di soluzione di silanizzazione e distribuirlo uniformemente su tutta la superficie della piastra con un fazzoletto di carta.
- Togliere l'eccesso di soluzione silanizzazione immergendo la lastra in un bicchiere d'acqua.
- Prendere la piastra di fuori del bicchiere, posarlo su un tovagliolo di carta asciutto, lato silanizzata, e asciugare la superficie esposta strofinando leggermente con un tovagliolo di carta.
- Rimuovere la pellicola protettiva sul forato, doppio bastone distanziatoree applicare il, lato adesivo distanziatore verso il basso, alla superficie asciutta e silanizzata della lastra di vetro. Assicurarsi che il distanziale è posizionata correttamente sulla piastra di base, con l'angolo superiore sinistro e due lati adiacenti del distanziale e la piastra, coincidente.
- Utilizzare un rullo o brayer di appiattire il distanziatore sul basamento e creare una chiusura a tenuta tra loro.
Premontati piastre sono disponibili in commercio (HR3-151, Hampton Ricerca; MD11-55-100, dimensioni molecolari e LCP96T-UVP70U, Swissci). Per ragioni di costo, si preferisce montare i piatti stessi seguendo il protocollo sopra.
2. Nel Meso Robot 1
Il primo robot meso essere dimostrata in questo articolo video è quello attualmente in uso nella MS e FB Group (Figura 3). I dettagli completi del robot può essere trovato in Materiali e nella sezione di riferimento 5. I materiali e equipment tenuti a istituire un processo di cristallizzazione uso del robot sono riportati in dettaglio Materiali.
- Posizionare la piastra di base con distanziale preparato in sezione 1 sul ponte del robot. Essa ha una propria piattaforma contrassegnati con posizioni anche per finalità di base piastra di allineamento. La piastra deve essere etichettati per l'identificazione.
- Fissare il blocco a 96 pozzetti precipitante nella propria piattaforma sul ponte del robot vicino alla piastra cristallizzazione.
- Aprire il blocco con attenzione da staccando il tappo di plastica di chiusura.
- Accendere l'umidificatore e dirigere il flusso di aria umida sopra e attraverso il basamento sul ponte del robot. L'umidificatore è stato dimostrato per ridurre l'evaporazione della soluzione precipitante e migliorare la riproducibilità tra la piastra 5 cristallizzazione. Può essere attivata prima di set-up pre-umidificare l'ambiente zona quando l'umidità relativa è bassa, o in altro modo, poco prima della somministrazione di mesofase inizio.
- Inizializzare il robot seguendo le istruzioni del produttore. Istruzioni specifiche dello strumento non sarà descritto qui in dettaglio, perché le procedure esatte cambiano nel tempo. Essenzialmente, ciò che accade durante l'inizializzazione è che l'erogazione mesofase braccio del robot è dotato di posizioni di riferimento in tre direzioni ortogonali X, Y e Z.
- Fissare la proteina-carico mesofase in una siringa Hamilton, completo di erogazione ago, a braccio 1 del robot (Figura 3). Tutti i dettagli su come preparare il mesofase e come caricarlo nella siringa sono stati descritti in Riferimenti 3,7-10.
- Rimuovere il coperchio di protezione superiore dal distanziale sulla cristallizzazione basamento e allineare i pozzetti sulla piastra con fiducial sulla piastra base piattaforma. Nota, ai fini di questo video, il coperchio di protezione è stato lasciato sul posto per aiutare il visualizzatore durante la fase di allineamento.
- Allineare la punta dell'ago della syring erogazionee con il fondo del pozzo alto nell'angolo sinistro della piastra di cristallizzazione (Well A1). Questo viene fatto occhio regolare l'altezza o coordinata Z del braccio di erogazione mentre si guarda come chiudere la punta dell'ago viene al fondo del pozzo. Che la punta si sfiora il fondo del pozzo può essere giudicato spostando la piastra da lato a lato sulla piattaforma pur sempre leggermente regolare l'altezza del braccio di erogazione.
- Inserire nel computer la coordinata Z del braccio di distribuzione in cui i contatti punta il piatto. Erogazione è programmata per avvenire con la punta dell'ago 80 micrometri da questo riferimento Z-posizione che corrisponde alla superficie della piastra di base.
- Posizione dell'occhio la punta dell'ago al centro del Well A1. Conservare nel computer di controllo del riferimento X, coordinata Y del braccio di erogazione in cui è centrata la punta. Questo coordinate viene utilizzato per definire il centro rimanenti pozzetti sulla piastra.
- Prime la siringa con il comando appropriato nel computer robot affinché mesofase fresca riempie l'ago di erogazione e che i pozzetti prima e le successive ricevono il loro complemento completo di mesofase. Pulire mesofase estruso sulla punta dell'ago con un fazzoletto.
- Avviare il Run Robot (X-AP) programma di avviare un ciclo di lavaggio passaggi in cui vengono lavati i suggerimenti precipitanti di erogazione sul braccio 2 del robot e sono pronti per aspirare le soluzioni dal blocco precipitante.
- Attivare la funzione di distribuzione del robot per mettere in moto il caricamento sequenziale di pozzi con proteina-mesofase carico (di solito 50 nl) prima, una colonna di otto pozzi alla volta, seguita da soluzioni precipitanti (generalmente 800 nl). Tra colonne di carico, i rendimenti erogazione braccio mesofase ad una posizione di parcheggio dove si trova l'estremità dell'ago in una spugnetta umida per impedire mesofase sulla punta si secchi. Il processo di erogazione mesofase e precipitante viene ripetuto11 volte attraverso la piastra finché la piastra viene riempito. Il caricamento di una piastra a 96 pozzetti con mesofase e precipitante prende 5 minuti per completare.
- Non appena la piastra viene riempito e le braccia del robot sono ritornati nelle loro posizioni parco, rimuovere la piastra dal ponte del robot e posizionarlo su una superficie piana solida.
- Immediatamente, sigillare la piastra con un coperchio di vetro per ridurre il tempo-dipendenti cambiamenti nella composizione ben. È importante garantire che tutti i 96 pozzetti sono integralmente coperti, che il coperchio di vetro è allineato quadrata con la piastra di base e che nessuno dei coprioggetti estende oltre l'ingombro del basamento. Un rullo o brayer viene utilizzato per creare una tenuta e una tenuta uniforme tra il coperchio di vetro e il distanziale.
- Controllare la piastra per essere sicuri che il set up è andato come dovrebbe. Ciò che si è alla ricerca di un 'uovo fritto in padella' aspetto in ogni pozzetto. Il tuorlo di uovo fritto corrisponde al mesofase. Il bianco dell'uovo è la soluzione molto precipitantee sul bordo della padella è il perimetro della cristallizzazione bene. Idealmente, i tre sono concentrici.
- Porre la piastra in una temperatura controllata deposito per la crescita di cristalli.
- Se non ci sono più le piastre da istituire, rimuovere il blocco precipitato dal ponte del robot, che sigilla ermeticamente e rimetterlo in deposito.
- Rimuovere la siringa contenente il mesofase dal braccio di erogazione del robot, smontare e lavare le sue parti compresi dell'ago erogatore e boccola, accuratamente con metanolo ed asciutto in preparazione per l'uso successivo.
3. Nel Meso Robot 2. Mosquito LCP
Il Mosquito LCP robot (Figura 4) comprende un distributore mesofase simile a quello utilizzato dal robot 1. In contrasto con Robot 1, eroga precipitante per mezzo di puntali monouso. Software di programmazione viene utilizzato per impostare lo strumento per lavorare con piatti particolari e cristallizzazione precipitblocchi di formica, e di dispensare volumi definiti dall'utente di mesofase e precipitante in una sequenza specificata. Tali dettagli sono forniti dal produttore e non verrà qui descritto.
- Preparare una siringa Hamilton, completo di ago e riempito con proteina-carico mesofase, come descritto sopra in Robot 1 e all'articolo JoVE 1712 1.
- Fissare la siringa in posizione sul braccio del robot di erogazione.
- Utilizzare la piattaforma ha montato sensore laser per stabilire le coordinate X e Y del dell'ago sulla siringa di erogazione. Questo è un importante passo necessario per assicurare che la mesofase viene erogato con precisione al centro di ciascun pozzetto della piastra.
- Con il tocco di un pulsante sul pannello di controllo, adescare la siringa per espellere mesofase dall'ago. Rimuovere mesofase estruso dalla punta dell'ago con un tessuto in preparazione per l'utilizzo del robot per caricare pozzi.
- Prima di posizionare la piastra di cristallizzazione sul ponte del umida roboten la superficie della piattaforma con qualche goccia d'acqua per aiutare a tenere la piastra in posizione per capillarità.
- Togliere il coperchio di protezione dal distanziale sul vetro piastra di base e metterlo sulla sua piattaforma con decisione per garantire una buona aderenza. Utilizzare i tre fiducial sulla piattaforma per allineare i tre pozzetti angolari assicurando così il corretto posizionamento dei pozzetti sulla piastra rispetto alla punta dell'ago erogatore. Lo strumento è comandato per immettere un ciclo di erogazione.
- Il ciclo inizia con una fase di caricamento, secondo cui viene erogata mesofase su una piastra di vetro immediatamente prima di passare a caricare pozzetti con mesofase fresca. I carichi primo robot con mesofase una colonna verticale di 8 pozzetti sulla piastra e poi usa le punte monouso per erogare la soluzione precipitante in cima al bolo mesofase. Il processo viene ripetuto 11 volte lungo la lunghezza della piastra finché tutti i pozzetti vengono riempiti. L'intero processo dura circa 5 minuti per essere completato.
- Rimuoverela piastra riempito dalla piattaforma del robot e sigillarlo con un coperchio di vetro come descritto sopra in Robot 1.
- Posizionare la piastra, etichettati, in un ambiente a temperatura controllata per la crescita di cristalli.
4. Nel Meso Robot 3. Gryphon LCP
Il Gryphon LCP robot (Figura 5) incorpora un sistema simile mesofase erogazione a quello sopra descritto per robot 1 e 2. Ciò che distingue dalle altre due è che tutte le soluzioni precipitanti 96 vengono dispensate simultaneamente.
- Preparare la proteina-carico mesofase e caricarlo nella siringa di erogazione, come descritto sopra, sotto Robots 1 e 2, e all'articolo JoVE 1712 1.
- Fissare la siringa in posizione sul braccio del robot di erogazione.
- Posizionare il blocco di soluzione precipitante e piastra cristallizzazione sul ponte del robot.
- Caricare il 96-punta head con soluzioni precipitanti. Definito dall'utente tempo di ritardo è prevista per facilitare l'aspirazione precipitanti viscosi.
- Comandare lo strumento per immettere un ciclo di erogazione. Il ciclo inizia con la mesofase erogato sequenzialmente nei 96 pozzetti in un processo che richiede circa 1 minuto per completare. Il 96-tip testa eroga quindi tutti 96 soluzioni precipitanti immediatamente sopra i boli mesofase nei pozzetti di cristallizzazione. L'intero processo di caricamento delle lastre è finito in 2 min.
- Rimuovere la piastra riempito dalla piattaforma del robot e sigillarlo con un coperchio di vetro come descritto sopra in Robot 1.
- Posizionare la piastra, etichettati, in un ambiente a temperatura controllata per la crescita di cristalli.
5. Risultati rappresentativi
Lo scopo di questo articolo il video è quello di dimostrare come impostare automaticamente le prove di cristallizzazione con un viscoso, proteine di membrana-carico mesofase in vetro sandwich 96 pozzetti cristallizzazione piastre. L'enfasi è sulla automazione attraverso l'uso di robot specializzati che richiedono un minimo intervento manuale. Riproducibilità e precisione, in termini di volumi di mesofase e precipitante erogato e il posizionamento all'interno del pozzo, è previsto quando viene utilizzato un robot. Questi sono importanti dal punto di vista di screening efficace delle condizioni che supportano crystallogenesis. Sono anche critico per il passo successivo nella pipeline di analisi che è di valutare la crescita di cristalli spesso fatto con apparecchiature di imaging. Destinazione finale o bolo è la chiave per il processo di imaging, e la disposizione irregolare e improprio del bolo nel pozzo di solito richiede l'intervento dell'utente per correggere e richiede tempo. Per scopi di illustrazione, esempi di lastre adeguatamente e correttamente caricati sono mostrati in Figura 6.
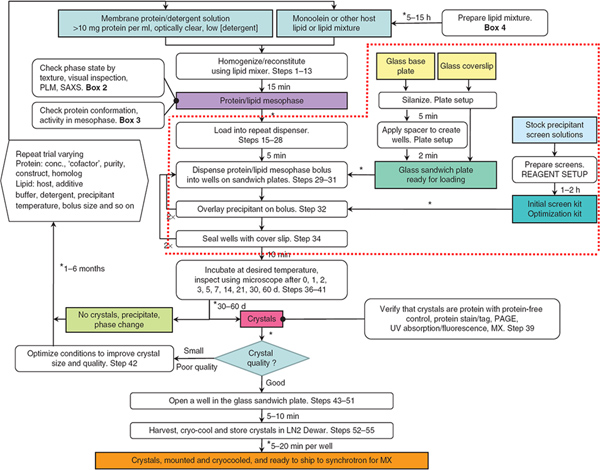
Figura 1. Il diagramma di flusso sintetizza i passaggi necessari per la raccolta di produzione, e la crio-raffreddamento in cristalli membrana meso-coltivate proteine. Passi circondato dalla linea tratteggiata rossa sono al centro di questo articolo JoVE. I robot sono stati utilizzati per erogare soluzioni mesofase e precipitante nei passaggi 29-32. Da riferimento 3. Clicca qui per ingrandire la figura .

Figura 2. A pieno carico e sigillato a 96 pozzetti a piastra di vetro cristallizzazione. Ogni pozzetto contiene 50 fase cubica nl e 1 ul di soluzione precipitante. Per chiarezza, la fase cubica è stato macchiato con il Sudan rosso e la soluzione precipitante include blu di metilene. Da riferimento 5.
_upload/4000/4000fig3.jpg "alt =" Figura 3 "/>
Figura 3. La meso in robot (Robot 1). Il robot è dotato di due braccia. Braccio 1 dispensa la proteina carica di mesofase lipidico. Braccio 2 eroga soluzioni precipitanti. Durante il riempimento, la piastra a 96 pozzetti rimane fissato in posizione sul ponte del robot che si è stazionario. Le due braccia si muovono per fornire soluzioni mesofase e precipitante. Da riferimento 3.

Figura 4. La zanzara LCP robot (Robot 2). In contrasto Robot 1, il ponte del LCP Mosquito, su cui siede la piastra a 96 pozzetti e il blocco di soluzione precipitante, si sposta orizzontalmente durante il riempimento.

Figura 5. Il Gryphon LCP robot (Robot 3). Durante unaistituito, il distributore lipidico fase cubica si sposta per fornire proteine carico mesofase sulla piastra a 96 pozzetti. Il ponte si traduce poi in orizzontale per posizionare la piastra sotto la testa precipitante punta soluzione. Tutte le soluzioni precipitanti 96 vengono dispensate simultaneamente. Immagine proveniente dal produttore ( http://www.artrobbins.com/ ) ed etichettati.

Figura 6. A pieno carico e sigillato piastra a 96 pozzetti a sandwich di vetro (A) e pozzetti correttamente (B) e impropriamente (C, D) riempito con il meso in robot (Robot 1). L'etichetta del codice a barre sulla piastra in A viene utilizzato per tenere traccia la piastra del dispositivo piastra incubatore / immagini. In pannelli BD, soluzione precipitante e mesofase sono contrassegnati P ed M, rispettivamente. L'atteso 'uovo fritto su un piatto'aspetto del bene in B è caratteristica di un correttamente e sigillato bene. In C, il precipitante è stato erogato nel pozzo impropriamente in una posizione decentrata ed è entrato in contatto con il distanziatore. In C, sembrerebbe anche che il volume della mesofase è meno di quanto dovrebbe essere. Un esempio di carico incompleta con soluzione precipitante è mostrato in D. Per scala, il diametro di tutti i pozzetti è di 6 mm.
Discussion
In questo articolo video che abbiamo dimostrato come utilizzare un robot per impostare automaticamente in prove di cristallizzazione meso in lastre di vetro da 96 pozzetti a sandwich con una proteina-mesofase carico lipidico. I robot utilizzati in questo lavoro sono stati progettati per includere una siringa di vetro spostamento positivo per la consegna accurata e riproducibile di volumi di nanolitri mesofase viscoso e appiccicoso, come originariamente descritto 7.
Accuratezza e precisione sono le caratteristiche importanti di un robot. Tuttavia, queste caratteristiche sono solo buono come il grado di regolarità e di cui viene valutato le prestazioni del robot e taratura. Inutile dire che le prestazioni del robot deve essere valutato quando singole piastre vengono costituiti. Non è corretto pensare che il robot funzionerà senza problemi e di lasciare il robot per l'esecuzione automatica. L'operatore attento e attento dovrebbe essere in position notare da un suono o un aspetto quando qualcosa non funziona correttamente e di correggere immediatamente. Inoltre, ogni piastra deve essere attentamente controllata da occhio per uniformità di contenuto e non appena la piastra è sigillata e prima di essere messo fuori per prove di cristallizzazione. Questo richiede solo pochi secondi per eseguire e può essere eseguita mentre la piastra successiva viene caricata. Notare, per esempio, che i pozzetti particolari non sono adeguatamente riempiti può evidenziare il fatto che una certa punta di erogazione precipitante viene malfunzionamento. Se la consegna di mesofase essere visto per essere irregolare, il relativo elemento difettoso avrebbe bisogno di essere corretti immediatamente. Da notare questi problemi e fare le relative rettifiche durante il set up farà risparmiare tempo e materiali, tra cui lipidi prezioso e proteina di membrana. Se un imager viene utilizzato per monitorare la crescita dei cristalli, l'accuratezza e la precisione possono essere monitorati durante l'esposizione. Ad esempio, problemi sistematici con goccia o boloposizione dalla termocamera indicano che qualcosa non è giusto e che le azioni correttive da qualche parte a monte del protocollo è necessario.
Per motivi di prestazioni affidabili, pertanto il robot deve essere calibrato a intervalli regolari e, se necessario. Calibrazioni dovrebbe includere il volume di precipitante e mesofase pronunciata quanto posizionamento bolo e precipitato nel pozzo. Ovviamente, per quanto possibile, la taratura deve essere effettuata utilizzando i volumi e materiali simili a quelli che verranno utilizzati in studi condotti nel periodo di riferimento l'esercizio di controllo della qualità.
Importante come calibrazione è così anche sta avendo in magazzino una quantità adeguata di parti del robot e forniture. Guasti catastrofici e inaspettati, blocchi e crash possono e si verificano. In tal caso, avendo a disposizione una punta di erogazione precipitante sostituzione, per esempio, potrebbe significare che un prezioso preparazione proteina di membrana viene utilizzata come dovrebbe enon è sprecato.
Alcuni dei vantaggi di un robot includono il fatto che funzionerà sostanzialmente continuo e che non soffre di o 'lamentare' affaticamento. Un robot può essere utilizzato anche in condizioni che non sono considerati human-friendly, come al buio, in condizioni di illuminazione e di condizioni ambientali controllate, ed a temperature estreme. I robot hanno dimostrato in questo articolo sono stati tutti utilizzati in condizioni ambientali a ~ 20 ° C. Tuttavia, ci sono proteine e progetti che richiedono temperature non ambientali, luce controllata 11,12 e un ossidante o un ambiente riducente 13. Tutti questi possono essere soddisfatti, con relativa facilità, quando un robot cristallizzazione viene utilizzato.
In un articolo precedente video JoVE abbiamo dimostrato come prove di cristallizzazione per il metodo in meso sono impostati manualmente 1. Il volume minimo di mesofase che può essere erogato affidabile a mano è limitata by manualità la acutezza visiva e costante della persona che l'impostazione dei processi. Nella nostra esperienza, i volumi di mesofase a partire da 100 nl sono facilmente gestite. Sappiamo di un laboratorio in cui il volume predefinito erogato manualmente è di circa 40 nl. Tuttavia, volumi notevolmente più piccoli sono possibili usando un robot. Separatamente, abbiamo dimostrato che i volumi mesofase a partire da 550 picolitri può fare a meno robot 14. Da quel lavoro era chiaro che miniaturizzazione dal robot è possibile che, se attuato, porterebbe ad una notevole riduzione della quantità di proteina di membrana valore necessario per effettuare un processo di cristallizzazione.
In questo articolo video, tre robot disponibili in commercio sono stati utilizzati per dimostrare high-throughput cristallizzazione della proteina di membrana con mesofasi lipidiche. Il primo di questi è stato sviluppato nel gruppo MS & FB basata sulla nostra esperienza impostare manualmente prove, come descritto in JoVE 1712 1. Questo è lo strumentomento abbiamo più familiarità con e la maggior parte dell'attuale articolo è dedicato al suo utilizzo. Gli altri due robot erano in dimostrazione nel MS & Gruppo FB al momento è stato scritto l'articolo e il filmato in questione è incluso qui nell'interesse di completezza. Tutti e tre i robot utilizzano molto lo stesso sistema mesofase di erogazione, la caratteristica essenziale di che è un positivo siringa di vetro spostamento 5,7. Essi differiscono significativamente più rispetto alla consegna precipitante. Robot 1 e 2 può erogare contemporaneamente precipitante in 8 pozzetti, una singola colonna su una piastra cristallizzazione alla volta. Al contrario, Robot 3 dispensa tutti i 96 soluzioni precipitanti in una singola azione. Robot 2 è l'unico strumento con puntali precipitanti di erogazione. Ci sono vantaggi e svantaggi associati con i diversi strumenti che dipendono dalla particolare applicazione, questi non saranno elaborati qui. Basti dire che tutti e tre di lavoro e hanno prodotto cristalli di meproteine mbrane dal metodo in meso.
I passi successivi nel processo generale di determinazione della struttura di cristallografia macromolecolare sono di raccogliere e di crio-cool cristalli piatti installati come descritto in questo articolo video e di registrare e di processo diffrazione di raggi X da loro. Questi argomenti sono trattati in articoli separati Giove in questa serie 1,15.
Disclosures
Nessun conflitto di interessi dichiarati.
Acknowledgments
Ci sono molti che hanno contribuito a questo lavoro e la maggior parte sono della membrana Biologia Strutturale e Funzionale del Gruppo, sia i membri passati e presenti. A tutti rivolgiamo i nostri più sentiti ringraziamenti e apprezzamento. Questo lavoro è stato sostenuto in parte da finanziamenti Science Foundation Ireland (07/IN.1/B1836), il National Institutes of Health (GM75915, P50GM073210 e U54GM094599), e 7 ° PQ CM0902 Azione COST.
Materials
| Name | Company | Catalog Number | Comments |
| Brayer (roller) | Fisher Scientific | 50820937 | Tool |
| Gas-tight syringes | Hamilton | 81030 | Tool |
| Glass coverslips | Marienfeld | 01029990911 | Disposable |
| Glass plates | Marienfeld | 1527127092 | Disposable |
| Gryphon LCP Robot | Art Robbins | NA | Tool |
| In meso robot | Anachem/Gilson | NA | Tool |
| Lab notebook | Various | NA | Tool |
| Mosquito LCP Robot | TTP Labtech | NA | Tool |
| Perforated double-stick spacer tape | Saunders Corporation (hole-punched) | customized | Disposable |
| Precipitant solutions | Various | Various | Reagent |
| Purified water | Millipore | NA | Reagent |
| Rain-X | Shell Car Care | 80199200 | Reagent |
| Syringe tips | Hamilton | 7770-020 (gauge 22) | Tool |
| Tissues | Various | Various | Disposable |
| Water bottle | various | NA | Reagent |
References
- Caffrey, M., Porter, C. Crystallizing membrane proteins for structure determination using lipidic mesophases. J. Vis. Exp. (45), e1712 (2010).
- Cherezov, V., Caffrey, M. Nano-volume plates with excellent optical properties for fast, inexpensive crystallization screening of membrane proteins. J. Appl. Crystallogr. 36, 1372-1377 (2003).
- Caffrey, M., Cherezov, V. Crystallizing membrane proteins using lipidic mesophases. Nat. Protocols. 4, 706-731 (2009).
- Liu, W., Cherezov, V. Crystallization of membrane proteins in lipidic mesophases. J. Vis. Exp. (49), e2501 (2011).
- Cherezov, V., Peddi, A., Muthusubramaniam, L., Zheng, Y. F., Caffrey, M. A robotic system for crystallizing membrane and soluble proteins in lipidic mesophases. Acta Crystallogr. D Bio.l Crystallogr. 60, 1795-1807 (2004).
- Peddi, A. High-throughput automated system for crystallizing membrane proteins in lipidic mesophases. IEEE Trans. Autom. Sci. Eng. 4, 129-140 (2007).
- Cheng, A., Hummel, B., Qiu, H., Caffrey, M. A simple mechanical mixer for small viscous lipid-containing samples. Chem. Phys. Lipids. 95, 11-21 (1998).
- Caffrey, M. Crystallizing membrane proteins for structure-function studies using lipidic mesophases. Biochem. Soc. Trans. 39, 725-732 (2011).
- Caffrey, M. Crystallizing membrane proteins for structure determination: use of lipidic mesophases. Annu. Rev. Biophys. 38, 29-51 (2009).
- Caffrey, M. Membrane protein crystallization. J. Struct. Biol. 142, 108-132 (2003).
- Gushchin, I., Reshetnyak, A., Borshchevskiy, V., Ishchenko, A., Round, E., Grudinin, S., Engelhard, M., Buldt, G., Gordeliy, V. Active State of Sensory Rhodopsin II: Structural Determinants for Signal Transfer and Proton Pumping. J. Mol. Biol. 412, 591-600 (2011).
- Jordan, P., Fromme, P., Witt, H. T., Klukas, O., Saenger, W., Krauss, N. Three-dimensional structure of cyanobacterial photosystem I at 2.5 angstrom resolution. Nature. 411, 909-917 (2001).
- Grawert, T., Span, I., Eisenreich, W., Rohdich, F., Eppinger, J., Bacher, A., Groll, M. Probing the reaction mechanism of IspH protein by x-ray structure analysis. Proc. Natl. Acad. Sci. USA. 107, 1077-1081 (2010).
- Cherezov, V., Caffrey, M. Picolitre-scale crystallization of membrane proteins. J. Appl. Crystallogr. 39, 604-606 (2006).
- Li, D., Boland, C., Aragao, D., Walsh, K., Caffrey, M. Harvesting and cryo-cooling crystals of membrane proteins grown in lipidic mesophases for structure determination by macromolecular crystallography. J. Vis. Exp. (67), e4001 (2012).
