

Summary
Heri beskrives en robot tilnærming til high-throughput krystallisering av membran proteiner i lipidic mesophases for bruk i strukturbestemmelse hjelp makromolekylær røntgenkrystallografi. Three roboter kan håndtere det viskøse og klebrig protein-laden mesofase integrert til metoden innføres.
Abstract
Struktur-funksjon studier av membran proteiner stor nytte av å ha tilgjengelige høyoppløselige 3-D strukturer av den type som tilbys gjennom makromolekylær røntgenkrystallografi (MX). En viktig ingrediens i MX er en jevn tilførsel av ideelt diffraksjon kvalitet krystaller. Den i meso eller lipidic kubiske fase (LCP) metoden for utkrystalliserer membran proteiner er en av flere metoder for krystallisering membran proteiner. Det gjør bruk av en bicontinuous mesofase til å vokse krystaller. Som en metode, har det hatt noen spektakulære suksesser sent og har tiltrukket seg mye oppmerksomhet med mange fagmiljøer nå interessert i å bruke det. En av utfordringene knyttet til metoden er at hosting mesofase er ekstremt tyktflytende og klebrig, som minner om en tykk tannkrem. Dermed utlevering det manuelt i en reproduserbar måte i små volumer i krystallisering brønner krever dyktighet, tålmodighet og en stødig hånd. En protokoll for å gjøre just som ble utviklet i membranen Structural & Funksjonell Biology (MS & FB) Gruppe 1-3. JOVE video artikler som beskriver fremgangsmåten er tilgjengelige 1,4.
Den manuelle tilnærming for å sette opp i meso studier har klare fordeler med spesialitet programmer, for eksempel krystall optimalisering og derivatisering. Det gjør lider imidlertid fra å være en lav gjennomstrømming metode. Her viser vi en protokoll for å utføre i meso krystallisering forsøk robotically. En robot tilbyr fordelene av hastighet, nøyaktighet, presisjon, miniatyrisering og å kunne jobbe kontinuerlig i lengre perioder under hva som kan anses som fiendtlig forhold som i mørket, i en reduserende atmosfære eller ved lave eller høye temperaturer. En i meso robot, når de brukes riktig, kan forbedre produktiviteten av membranprotein struktur og funksjon forskning ved å tilrettelegge krystallisering som er en av de langsomme trinn isamlet strukturbestemmelse rørledning.
I denne videoen artikkelen viser vi bruken av tre kommersielt tilgjengelige roboter som kan dispensere viskøs og klebrig mesofase integrert i meso crystallogenesis. Den første roboten ble utviklet i MS & FB Gruppe 5,6. De andre to har nylig blitt tilgjengelig og er inkludert her for fullstendighet.
En oversikt av protokollen dekket i denne artikkelen er presentert i figur 1. Alle manipulasjoner ble utført ved romtemperatur (~ 20 ° C) under omgivelsesbetingelser.
Protocol
1. Klargjøre Krystallisering Plate
Konfigurere å gjøre en krystallisering trial robotically begynner med fremstillingen av den base-plate av glass-sandwich krystallisering plate (figur 2), som er beskrevet i detalj i Referanse 2. Base-platen må først silaniserte og den perforerte dobbel-stick spacer som skaper brønnene, må påføres på platen. Materialer og forsyninger som trengs for denne er spesifisert under Materials.
- Sett platen på et papirhåndkle, påfør noen dråper silanizing løsning og fordele det jevnt over plate overflaten med et papirlommetørkle.
- Fjern overflødig silanizing løsning ved å dyppe platen i et begerglass med vann.
- Ta platen ut av begerglasset, legg den på et tørt papirhåndkle, silanbehandlede siden opp og tørk den eksponerte overflaten ved å tørke lett med et papirhåndkle.
- Trekk av beskyttelsesdekselet på den perforerte, dobbel-stick spacerog anvende avstandsskiven klebesiden ned, til den tørre, silanbehandlede overflate av glassplaten. Være sikker på at spacer er riktig plassert på fotplaten, med den øvre venstre hjørne og de to tilstøtende sider av avstandsstykket og plate, sammenfallende.
- Bruk en rull eller brayer å flate ut avstandsstykket på base-plate og å skape en tett forsegling mellom dem.
Ferdigmontert platene er kommersielt tilgjengelig (HR3-151, Hampton Forskning, MD11-55-100, Molecular Mål, og LCP96T-UVP70U, Swissci). For kostnad grunner, foretrekker vi å montere våre egne plater etter protokollen ovenfor.
2. I Meso Robot 1
Den første i meso robot å bli demonstrert i denne videoen artikkelen er det som i øyeblikket er i bruk i MS & FB Group (figur 3). Fullstendige opplysninger om roboten finner du under Materialer og i Reference § 5. Materialene og equipment som kreves for å sette opp en krystallisering forsøk med roboten er spesifisert under Materials.
- Plasser base-plate med spacer utarbeidet i § 1 på dekket av roboten. Det har sin egen plattform merket med vel posisjoner for formål base-plate justering. Platen skal merkes for identifikasjon.
- Sikre 96-brønns fellingsmidlet blokk i sin egen plattform på dekk av roboten ved siden krystallisering plate.
- Åpne blokken forsiktig ved å trekke av plast tetningslokket.
- Slå på luftfukteren og dirigere strømmen av fuktig luft over og på tvers av fotplaten på dekket av roboten. Luftfukteren har vist seg å redusere fordamping av fellingsmidlet løsningen og å forbedre reproduserbarheten tvers krystallisasjonssonen plate 5. Det kan slås på før satt opp til pre-humidify området når relativ luftfuktighet er lav, eller på annen måte, like før utleveringen av mesofase starter.
- Initialiser robot følge produsentens instruksjoner. Instrument spesifikke instruksjoner vil ikke bli beskrevet her i detalj fordi eksakte prosedyrer vil endre seg over tid. Hovedsak, hva som skjer under initialisering er at mesofase dispensering armen på roboten er forsynt med referanse posisjoner i tre ortogonale retninger X, Y og Z.
- Fest proteinet-laden mesofase i en Hamilton sprøyte, komplett med dispensering nål til Arm 1 av roboten (Figur 3). Alle detaljer om hvordan å forberede mesofase og hvordan du legger det inn i sprøyten er beskrevet i Referanser 3,7-10.
- Fjern det øverste beskyttende deksel fra spacer på krystallisering base-plate og justere brønnene på plate med fiducials på base-plate plattform. Notat, for formålet med denne videoen ble beskyttelsesdekselet igjen på plass for å hjelpe Viewer under justeringsprosessen trinnet.
- Juster nålespissen av dispensing Syringe med bunnen av den øverste godt i venstre hjørne av krystallisering plate (Well A1). Dette gjøres ved øyet justere høyden eller Z-koordinaten utleveringsbeholderen armen mens du ser hvor nær nålespissen kommer til bunnen av brønnen. At spissen er bare berøre bunnen av brønnen kan bli bedømt ved å flytte platen fra side til side på plattformen mens aldri så litt justere høyden utleveringsledningskanalens armen.
- Skriv inn i datamaskinen den Z-koordinaten utleveringsbeholderen armen der spissen kontaktene plate. Leveringen er programmert til å skje med nålespissen 80 mikrometer fra denne referansen Z-posisjon som svarer til overflaten av fotplaten.
- Posisjon ved øyet tuppen av nålen ved sentrum Well A1. Oppbevares i den kontrollerende datamaskinen referansen X, Y koordinat for utlevering armen der spissen er sentrert. Denne koordinat brukes til å definere midten av de gjenværende brønnene på plate.
- Prime sprøyten med riktig kommando på roboten datamaskinen for å sikre at frisk mesofase fyller dispensing nålen og at de første og påfølgende brønner mottar sitt fulle komplement av mesofase. Tørk av ekstrudert mesofase på nålespissen med en vev.
- Start Kjør Robot (X-AP) program for å starte en runde med spyling trinn der precipitant dispensing tips om Arm 2 av roboten er vasket og er forberedt på å suge løsninger fra precipitant blokken.
- Aktiver dispense funksjonen på roboten for å sette i bevegelse den sekvensielle lasting av brønner med protein-laden mesofase (vanligvis 50 nl) første, en kolonne med åtte brønner av gangen, etterfulgt av fellingsmidlet løsninger (vanligvis 800 nl). Mellom lasting kolonner, fuktet mesofase dispensing arm tilbake til en parkeringsplass stilling hvor enden av nålen er plassert i en svamp for å hindre mesofase på spissen tørker ut. Prosessen av dispenser mesofase og fellingsmidlet gjentas11 ganger på tvers av plate til platen er fylt. Lasting av en 96-brønns plate med mesofase og fellingsmidlet tar 5 min for å fullføre.
- Så snart platen er fylt og robotarmer har returnert til sine park posisjoner, fjerne platen fra dekket av roboten og legg den på et flatt fast underlag.
- Umiddelbart, forsegle plate med et deksel-glass for å minimere tidsavhengige endringer i brønn sammensetning. Det er viktig å sikre at alle 96 brønner er fullt dekket, at dekselet-glass er justert firkanten med fotplaten, og at ingen av lokket-glasset strekker seg utover fotavtrykk av fotplaten. En rull eller brayer brukes til å opprette en tett og en ensartet tetning mellom deksel-glass og avstandsstykket.
- Inspisere plate for å være sikker den er satt opp gikk som det skulle. Hva man ser etter er en "stekt egg på en pan 'utseende i hver brønn. Eggeplomme av stekt egg tilsvarer mesofase. Den hvite av egg er precipitant solutipå og kanten av kokekaret er omkretsen av krystallisering godt. Ideelt sett tre er konsentriske.
- Plasser platen i en temperatur-kontrollert lagringsområde for krystallvekst.
- Hvis ingen flere plater skal settes opp, må du fjerne precipitant blokk fra dekket av roboten, forsegle det tett og sette den tilbake i lagring.
- Fjern sprøyten inneholder mesofase fra dispensing arm av roboten, demontere det, og vaske sine deler inkludert dispensing nål og hylse, nøye med metanol og tørr i forberedelse til neste bruk.
3. I Meso Robot 2. Mosquito LCP
Mygg LCP robot (figur 4) innbefatter en lignende mesofase dispenser til den som brukes av Robot 1. I motsetning til Robot 1, dispenses det fellingsmidlet ved engangsspisser. Programmering programvare brukes til å sette opp instrumentet for å arbeide med spesielle krystallisering plater og precipitmaur blokker, og å dispensere brukerdefinerte mengder mesofase og precipitant i en bestemt rekkefølge. Slike detaljer er gitt av produsenten, og vil ikke bli beskrevet her.
- Forbered et Hamilton sprøyte, komplett med nål og fylt med protein-laden mesofase, som beskrevet ovenfor under Robot 1 og i Jove artikkel 1712 1.
- Spenn sprøyten i stilling på utleveringsbeholderen armen av roboten.
- Bruke dekk montert lasersensor å etablere X og Y-koordinatene for nålen på dispensering sprøyten. Dette er et viktig trinn som kreves for å sikre at mesofase dispenseres nøyaktig på midten av hver brønn på platen.
- Med et trykk på en knapp på kontrollpanelet, prime sprøyten å utvise mesofase fra nålen. Fjern ekstrudert mesofase fra nålespissen med en vev i forberedelsene for bruk av robot å laste brønner.
- Før plassering av krystallisering platen på dekk av roboten fuktigno overflaten av plattformen med noen dråper vann for å bidra til å holde platen på plass ved kapillaritet.
- Fjern beskyttelsesdekselet fra spacer på glasset base-plate og plassere den på sin plattform fast for å sikre god vedheft. Bruke de tre fiducials på plattformen for å justere 3 hjørne brønnene dermed sikre riktig plassering av brønnene på plate med hensyn til utlevering nålespissen. Instrumentet er nå befalt å angi en dispensing syklus.
- Syklusen begynner med en andre grunning trinn hvor mesofase slippes på en liten glassplate umiddelbart før du går videre til å laste brønner med fersk mesofase. Robot første last med mesofase en vertikal kolonne av åtte brønner på plate og deretter bruker engangs tips for å dispensere precipitant løsning på toppen av mesofase bolus. Prosessen gjentas 11 ganger langs lengden av platen inntil alle brønnene er fylt. Hele prosessen tar ca 5 min å fullføre.
- Fjernden fylte plate fra plattformen av roboten og forsegle den med et deksel-glass som beskrevet ovenfor under Robot 1.
- Sett platen, riktig merket, i en temperatur kontrollert miljø for krystallvekst.
4. I Meso Robot 3. Gryphon LCP
Gryphon LCP roboten (figur 5) omfatter en lignende mesofase dispenser system som beskrevet ovenfor for roboter 1 og 2. Det som skiller det fra de to andre, er at alle 96 fellingsmidlet løsninger utleveres samtidig.
- Klargjør proteinet-laden mesofase og laste det inn utleveringssiden sprøyten, som beskrevet ovenfor, under roboter 1 og 2, og i sgu artikkel 1 1712.
- Spenn sprøyten i stilling på utleveringsbeholderen armen av roboten.
- Plasser fellingsmidlet løsningen blokken og krystallisering plate på dekket av roboten.
- Laste 96-tip head med precipitant løsninger. En brukerdefinert forsinkelsen er gitt for å lette aspirere viskøse fellingskjemikalier.
- Befale instrument for å angi en dispensing syklus. Syklusen begynner med mesofase blir utlevert fortløpende inn de 96 brønnene i en prosess som tar ca 1 min å fullføre. Den 96-tip hodet dispenses deretter alle 96 fellingsmidlet løsninger samtidig på toppen av mesofase boluser i krystallisasjons brønnene. Hele platen lasting prosessen er ferdig i 2 min.
- Fjern den fylte plate fra plattformen til roboten og forsegle den med en cover-glass som beskrevet ovenfor under Robot 1.
- Sett platen, riktig merket, i en temperatur kontrollert miljø for krystallvekst.
5. Representant Resultater
Hensikten med denne videoen artikkelen er å vise hvordan du setter opp automatisk krystallisering studier med en tyktflytende, membran protein-laden mesofase i glass totalaH 96-brønners krystallisasjons plater. Det legges vekt på automatisering gjennom bruk av spesialiserte roboter som krever minimalt manuell inngripen. Reproduserbarhet og presisjon, i form av mengder mesofase og precipitant doseres og plassering av både inne i, forventes når en robot blir brukt. Dette er viktig fra synspunkt av effektiv screening av forhold som støtter crystallogenesis. De er også kritisk for neste trinn i analysen rørledningen som er å evaluere krystallvekst ofte gjort med bildebehandlingsutstyr. Dråpe eller bolus plassering er nøkkelen til bildebehandling prosessen, og uregelmessig og feil plassering av bolus i brønnen krever vanligvis bruker intervensjon for å korrigere for og tar tid. For illustrasjonens skyld er eksempler på riktig og feilaktig loaded platene vist i Figur 6.
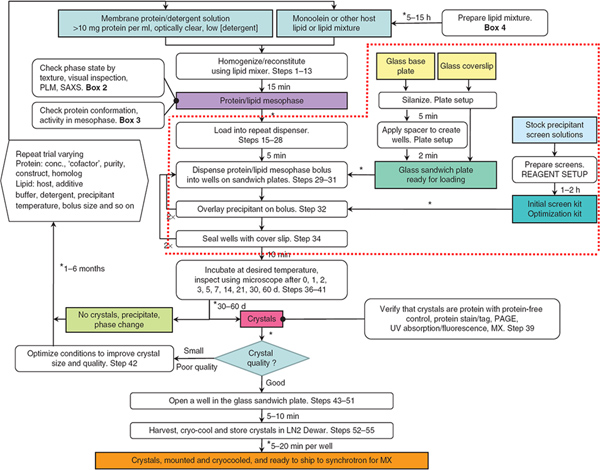
Figur 1. Flytdiagrammet oppsummerer trinnene involvert i produksjon, høsting og Cryo-kjøling av i meso-dyrket membran protein krystaller. Trinn omgitt av den stiplede røde linjen er fokus for denne Jove artikkelen. Roboter ble brukt til å dispensere mesofase og precipitant løsninger i trinn 29-32. Fra Reference 3. Klikk her for å se større figur .

Figur 2. En fullastet og forseglet 96-brønns glassplate-sandwich krystallisering plate. Hver brønn inneholder 50 nl kubikk fase og 1 pl precipitant løsning. For å tydeliggjøre den kubiske fase blitt farget med Sudan Rød og precipitant løsningen inkluderer metylenblått. Fra 5 Reference.
_upload/4000/4000fig3.jpg "alt =" Figur 3 "/>
Figur 3. Stedets meso robot (Robot 1). Roboten har to armer. Arm 1 dispenses protein-laden lipidic mesofase. Arm 2 dispenses precipitant løsninger. Under fylling, forblir 96-brønns plate festet i stilling på dekket av roboten som selv er stasjonær. De to armene beveger levere mesofase og fellingsmidlet løsninger. Fra 3 Reference.

Figur 4. Mosquito LCP robot (Robot 2). I motsetning til en Robot, dekket på Mosquito LCP, hvorpå sitter den 96-brønns plate og fellingsmidlet løsningen blokken, beveger seg horisontalt under fylling.

Figur 5. The Gryphon LCP robot (Robot 3). Under ensatt opp, flytter lipidic kubiske fase dispenser for å levere proteiner-laden mesofase på 96-brønns plate. Dekk oversetter deretter horisontalt for å posisjonere platen under fellingsmidlet løsningen spissen hodet. Alle 96 precipitant løsninger dispenseres samtidig. Bilde hentet fra produsenten ( http://www.artrobbins.com/ ) og merket.

Figur 6. En fullastet og forseglet 96-brønns glassplate sandwich plate (A) og brønnene riktig (B) og feil (C, D) fylt med i meso robot (Robot 1). Strekkodeetiketten på plate i A brukes til å spore platen i platen inkubator / bildeenheten. I paneler BD fellingsmidlet løsning og mesofase er merket P og M, respektivt. Den forventede 'stekt egg på en pan'utseende av brønnen i B er karakteristisk for en riktig lastet og forseglet godt. I C, har fellingsmidlet blitt dispensert inn i brønnen feil i en off-midtstilling og har kommet i kontakt med avstandsstykket. I C, vil det vises også at volumet av mesofase er mindre enn den burde være. Et eksempel på ufullstendig lasting med fellingsmidlet løsning er vist i D. For skala, er diameteren av alle brønner 6 mm.
Discussion
I denne videoen artikkelen har vi demonstrert hvordan man bruker en robot til å automatisk sette opp i meso krystallisering studier i 96-brønners glass sandwich-plater ved hjelp av en protein-laden lipidic mesofase. Robotene brukt i dette arbeidet ble spesielt utformet for å inkludere et positivt deplasement glassprøyte for nøyaktig og reproduserbar levering av nanoliter volumer av det viskøse og klebrig mesofase, som opprinnelig beskrevet 7.
Nøyaktighet og presisjon er viktige egenskaper for en robot. Imidlertid, disse egenskapene er bare så god som grad og regularitet som robot ytelsen blir evaluert og kalibrering utføres. Det sier seg selv at resultatene av roboten skal evalueres mens enkelte plater blir satt opp. Det er ikke hensiktsmessig å anta at roboten vil fungere feilfritt og forlate roboten til å kjøre uten tilsyn. Den oppmerksomme og observante operatør bør være i en position å merke av en lyd eller en opptreden når noe ikke fungerer som den skal, og for å rette det umiddelbart. I tillegg bør hver plate være nøye inspisert av øye for ensartethet av vel innhold så snart platen er forseglet og før det tas bort for krystallisering forsøk. Dette bør bare kreve noen sekunder å utføre og kan gjøres mens den neste platen blir lastet. Merke seg, for eksempel, kan det spesielle brønner er ikke riktig fylt fremheve det faktum at en viss precipitant dispensing tips er feil. Bør levering av mesofase sees å være uregelmessig, ville den relevante defekt element må rettes umiddelbart. Ved å notere disse problemene og gjøre de relevante justeringer i løpet satt opp vil spare tid og materialer, inkludert verdifull lipid og membran protein. Hvis en imager brukes til å spore krystallvekst kan nøyaktighet og presisjon også overvåkes under avbildning. For eksempel systematiske problemer med dråpe eller bolusBeliggenheten ved imager indikerer at noe ikke er riktig, og at korrigerende tiltak sted oppstrøms i protokollen er nødvendig.
Av hensyn til pålitelig ytelse derfor roboten må kalibreres regelmessig og ved behov. Kalibreringer bør omfatte volumet av fellingsmidlet og mesofase levert samt bolus og fellingsmidlet plassering i brønnen. Selvfølgelig bør om mulig kalibrering gjøres ved hjelp av volum og materialer som ligner de som vil bli brukt i studier utført i perioden som dekkes av kvalitetskontroll øvelsen.
Like viktig som kalibrering så er også å ha på lager en tilstrekkelig tilførsel av robot deler og rekvisita. Katastrofale og uventede feil, blokkeringer og krasjer kan og forekomme. I et slikt tilfelle, har tilgjengelig en erstatning felling produksjonstid spissen, for eksempel, kan bety at en meget verdifull membranprotein produktet inngår som den skal oger ikke bortkastet.
Noen av fordelene med en robot inkluderer det faktum at det vil fungere hovedsakelig kontinuerlig, og at det ikke lider eller 'klager over' tretthet. En robot kan også brukes under forhold som ikke er betraktet menneskevennlige, for eksempel i mørke, under kontrollert belysning og miljømessige forhold, og ved ekstreme temperaturer. Robotene demonstrerte i denne artikkelen ble alle brukt under vanlige betingelser ved ~ 20 ° C. Men det er proteiner og prosjekter som krever ikke-omgivelsestemperaturer, kontrollert lys 11,12 og en oksiderende eller reduserende miljø 13. Alle disse kan arrangeres, med relativ letthet, når en krystallisering robot blir brukt.
I en tidligere Jove video artikkelen viste vi hvordan krystallisering studier av i meso-metoden er satt opp manuelt 1. Minst mulig volum av mesofase som kan dispenseres pålitelig etter hånden er begrenset by synsskarphet og jevn handedness av personen sette opp forsøkene. I vår erfaring, er mengder mesofase så lavt som 100 nl lett håndterbar. Vi vet om en lab der standard dispensert volum manuelt er ca 40 nl. Imidlertid betydelig mindre volumer er mulig ved hjelp av en robot. Separat, har vi vist at mesofase volumer så lavt som 550 picoliters kan tappes robotically 14. Fra at arbeidet var det klart at ytterligere miniatyrisering av roboten er mulige som, hvis implementert, ville føre til en stor reduksjon i mengden av verdifulle membran protein nødvendig for å utføre en krystallisasjonsprosess trial.
I denne videoen artikkelen ble tre kommersielt tilgjengelige roboter brukes til å demonstrere high-throughput membran protein krystallisering ved hjelp lipidic mesophases. Den første av disse ble utviklet i MS & FB konsernet basert på vår erfaring konfigurerer prøvelser manuelt, som beskrevet i Jove 1712 1. Dette er instrument vi har mest kjennskap til og mesteparten av den nåværende artikkelen er viet til sitt bruk. De andre to roboter var på demonstrasjonen i MS & FB-konsernet på det tidspunktet artikkelen ble skrevet og relevant opptakene er tatt med her av hensyn til fullstendighet. Alle tre roboter bruker veldig mye det samme mesofase dispensing system, viktig funksjon som er en positiv fortrengning glassprøyte 5,7. De skiller mest betydelig med hensyn til fellingsmidlet produksjonstid. Roboter 1 og 2 kan dispensere precipitant samtidig til 8 brønner, en enkelt kolonne på en krystallisering plate om gangen. I kontrast, dispenses Robot 3 alle 96 precipitant løsninger i en enkelt handling. Robot 2 er det eneste instrumentet med engangs precipitant dispensing tips. Det er fordeler og ulemper knyttet til de ulike instrumentene som er avhengige av en bestemt applikasjon, og disse vil ikke bli utdypet her. Det er nok å si at alle tre arbeid og har produsert krystaller av megmbrane proteiner ved in meso metoden.
De neste trinnene i den samlede prosessen strukturbestemmelse av macromolecular krystallografi er å høste og Cryo-kule krystaller fra platene satt opp som beskrevet i denne videoen artikkel, og ta opp og prosess røntgendiffraksjon fra dem. Disse temaene er dekket i egne Jove artikler i denne serien 1,15.
Disclosures
Ingen interessekonflikter erklært.
Acknowledgments
Det er mange som har bidratt til dette arbeidet, og de fleste er fra Membran strukturelle og funksjonelle biologi Group, både tidligere og nåværende medlemmer. Til alle utvider vi vår varmeste takk og takknemlighet. Dette arbeidet ble støttet delvis av tilskudd fra Science Foundation Irland (07/IN.1/B1836), National Institutes of Health (GM75915, P50GM073210 og U54GM094599), og FP7 COST CM0902.
Materials
| Name | Company | Catalog Number | Comments |
| Brayer (roller) | Fisher Scientific | 50820937 | Tool |
| Gas-tight syringes | Hamilton | 81030 | Tool |
| Glass coverslips | Marienfeld | 01029990911 | Disposable |
| Glass plates | Marienfeld | 1527127092 | Disposable |
| Gryphon LCP Robot | Art Robbins | NA | Tool |
| In meso robot | Anachem/Gilson | NA | Tool |
| Lab notebook | Various | NA | Tool |
| Mosquito LCP Robot | TTP Labtech | NA | Tool |
| Perforated double-stick spacer tape | Saunders Corporation (hole-punched) | customized | Disposable |
| Precipitant solutions | Various | Various | Reagent |
| Purified water | Millipore | NA | Reagent |
| Rain-X | Shell Car Care | 80199200 | Reagent |
| Syringe tips | Hamilton | 7770-020 (gauge 22) | Tool |
| Tissues | Various | Various | Disposable |
| Water bottle | various | NA | Reagent |
References
- Caffrey, M., Porter, C. Crystallizing membrane proteins for structure determination using lipidic mesophases. J. Vis. Exp. (45), e1712 (2010).
- Cherezov, V., Caffrey, M. Nano-volume plates with excellent optical properties for fast, inexpensive crystallization screening of membrane proteins. J. Appl. Crystallogr. 36, 1372-1377 (2003).
- Caffrey, M., Cherezov, V. Crystallizing membrane proteins using lipidic mesophases. Nat. Protocols. 4, 706-731 (2009).
- Liu, W., Cherezov, V. Crystallization of membrane proteins in lipidic mesophases. J. Vis. Exp. (49), e2501 (2011).
- Cherezov, V., Peddi, A., Muthusubramaniam, L., Zheng, Y. F., Caffrey, M. A robotic system for crystallizing membrane and soluble proteins in lipidic mesophases. Acta Crystallogr. D Bio.l Crystallogr. 60, 1795-1807 (2004).
- Peddi, A. High-throughput automated system for crystallizing membrane proteins in lipidic mesophases. IEEE Trans. Autom. Sci. Eng. 4, 129-140 (2007).
- Cheng, A., Hummel, B., Qiu, H., Caffrey, M. A simple mechanical mixer for small viscous lipid-containing samples. Chem. Phys. Lipids. 95, 11-21 (1998).
- Caffrey, M. Crystallizing membrane proteins for structure-function studies using lipidic mesophases. Biochem. Soc. Trans. 39, 725-732 (2011).
- Caffrey, M. Crystallizing membrane proteins for structure determination: use of lipidic mesophases. Annu. Rev. Biophys. 38, 29-51 (2009).
- Caffrey, M. Membrane protein crystallization. J. Struct. Biol. 142, 108-132 (2003).
- Gushchin, I., Reshetnyak, A., Borshchevskiy, V., Ishchenko, A., Round, E., Grudinin, S., Engelhard, M., Buldt, G., Gordeliy, V. Active State of Sensory Rhodopsin II: Structural Determinants for Signal Transfer and Proton Pumping. J. Mol. Biol. 412, 591-600 (2011).
- Jordan, P., Fromme, P., Witt, H. T., Klukas, O., Saenger, W., Krauss, N. Three-dimensional structure of cyanobacterial photosystem I at 2.5 angstrom resolution. Nature. 411, 909-917 (2001).
- Grawert, T., Span, I., Eisenreich, W., Rohdich, F., Eppinger, J., Bacher, A., Groll, M. Probing the reaction mechanism of IspH protein by x-ray structure analysis. Proc. Natl. Acad. Sci. USA. 107, 1077-1081 (2010).
- Cherezov, V., Caffrey, M. Picolitre-scale crystallization of membrane proteins. J. Appl. Crystallogr. 39, 604-606 (2006).
- Li, D., Boland, C., Aragao, D., Walsh, K., Caffrey, M. Harvesting and cryo-cooling crystals of membrane proteins grown in lipidic mesophases for structure determination by macromolecular crystallography. J. Vis. Exp. (67), e4001 (2012).
