

Summary
Hierin beschreven een robot benadering high-throughput kristallisatie van membraaneiwitten in lipidische mesofasen voor gebruik in structuurbepaling met macromoleculaire X-ray kristallografie. Drie robots staat de behandeling van de viskeuze en kleverige eiwit beladen mesofase een integraal onderdeel van de methode worden geïntroduceerd.
Abstract
Structuur-functie studies van membraaneiwitten veel baat hebben beschikbare hoge-resolutie 3-D structuur van het type die via macromoleculaire X-ray kristallografie (MX). Een essentieel onderdeel van MX is een constante aanvoer van ideaal diffractie-kwaliteit kristallen. De in lipide meso of kubische fase (LCP) werkwijze voor het kristalliseren membraaneiwitten een van verschillende methoden beschikbaar voor het kristalliseren membraaneiwitten. Het maakt gebruik van een bicontinue mesofase in om kristallen. Als een methode, heeft het had een aantal spectaculaire successen van te laat en heeft veel aandacht getrokken met vele onderzoeksgroepen nu geïnteresseerd in het gebruik ervan. Een van de uitdagingen in verband met de methode is dat de hosting mesofase is zeer viskeus en kleverig, doet denken aan een dikke tandpasta. Zo doseren deze handmatig op een reproduceerbare wijze in kleine hoeveelheden in de kristallisatie putten vereist vaardigheid, geduld en een vaste hand. Een protocol voor het doen van just die werd ontwikkeld in het membraan Structural & Functionele Biologie (MS & FB) Groep 1-3. Jove video artikels beschrijven de methode beschikbaar 1,4.
De handmatige aanpak voor het opstarten van meso studies heeft duidelijke voordelen met gespecialiseerde toepassingen, zoals kristal optimalisatie en derivatisering. Het heeft echter last van het zijn een lage throughput methode. Hier tonen we een protocol voor het uitvoeren van in meso kristallisatie onderzoeken robot. Een robot biedt de voordelen van snelheid, nauwkeurigheid, precisie, miniaturisatie en kunnen continu werken langdurig onder welke kunnen worden beschouwd als vijandige omstandigheden, zoals in het donker in een reducerende atmosfeer of bij lage of hoge temperaturen. Een in meso robot, wanneer goed gebruikt, kan de productiviteit van membraaneiwit structuur en functie onderzoek aanzienlijk verbeteren door kristallisatie een van de stappen in de langzamealgemene structuur bepaling pijplijn.
In deze video artikel tonen we het gebruik van drie beschikbare robots dat het viskeuze en kleverige mesofase integraal in meso crystallogenesis kan afzien. De eerste robot werd ontwikkeld in de MS & FB Group 5,6. De andere twee zijn sinds kort beschikbaar en worden hier voor de volledigheid opgenomen.
Een overzicht van de protocol die in dit artikel is weergegeven in figuur 1. Alle manipulaties werden uitgevoerd bij kamertemperatuur (~ 20 ° C) onder omgevingsomstandigheden.
Protocol
1. Voorbereiden van de Kristallisatie Plate
Opzetten van een kristallisatie proces robot doen begint met de bereiding van de grondplaat van de glazen sandwich kristallisatie plaat (figuur 2), beschreven in referentie 2. De grondplaat moet eerst worden gesilaniseerd en de geperforeerde double-stick spacer zorgt dat de putjes moeten worden aangebracht op de plaat. De materialen en benodigdheden die nodig zijn voor deze zijn ingedeeld in Materials.
- Plaats de plaat op een papieren handdoek, breng een paar druppels van silaneren oplossing en verdeel deze over het plaatoppervlak met een papieren zakdoek.
- Verwijder het teveel aan silaneren oplossing door onderdompeling van de plaat in een beker water.
- Neem de plaat uit het bekerglas, plaats het op een droge papieren handdoek, gesilaneerde kant naar boven, en droog het blootgestelde oppervlak schoon door voorzichtig met een papieren handdoek.
- Verwijder de beschermkap op de geperforeerde, dubbel-stick spaceren toepassen spacer, kleverig beneden, de droge, gesilaniseerd oppervlak van de glasplaat. Controleer of de spacer goed gepositioneerd op de grondplaat met de linkerbovenhoek en de twee aangrenzende zijden van de spacer en de plaat, samenvallen.
- Gebruik een roller of brayer te vlakken de spacer op de basis-plaat en om een goede afdichting tussen hen te creëren.
Voorgemonteerde platen zijn in de handel verkrijgbaar (HR3-151, Hampton onderzoek; MD11-55-100, Molecular Afmetingen en LCP96T-UVP70U, Swissci). Vanwege de kosten, geven we de voorkeur aan onze eigen borden monteren volgens het protocol dat hierboven.
2. In Meso Robot 1
De eerste in meso robot worden aangetoond in dit artikel video is die momenteel in de MS en FB Group (figuur 3). De volledige details van de robot vindt u onder Materialen en in de sectie Referentie 5. De materialen en equipment voor het instellen van een kristallisatie proces met behulp van de robot zijn ingedeeld in Materials.
- Plaats de voet-plaat met spacer opgesteld in hoofdstuk 1 op het dek van de robot. Het heeft een eigen platform gemarkeerd met goed posities voor de toepassing van voetplaat uitlijning. De plaat moeten worden geëtiketteerd voor identificatiedoeleinden.
- Zet de 96-wells neerslagmiddel blok in zijn eigen platform op het dek van de robot naast de kristallisatie plaat.
- Open voorzichtig het blok door het afpellen van de plastic afsluitkap.
- Zet de luchtbevochtiger en richt de stroom van vochtige lucht over en over de basis-plaat op het dek van de robot. De bevochtiger is aangetoond dat verdamping van de precipiterende oplossing te verminderen en de reproduceerbaarheid verbeteren in de kristallisatie plaat 5. Het kan worden ingeschakeld voorafgaand aan de set-up voor een pre-bevochtigen het gebied bij relatieve luchtvochtigheid laag is, of op andere wijze, net voor de afgifte van de mesofase begint.
- Initialiseer de robot volgens de instructies van de fabrikant. Instrument specifieke instructies zal hier niet worden beschreven in detail, omdat exacte procedures zal de tijd veranderen. Wezen wat tijdens initialiseren dat de mesofase afgifte arm van de robot is voorzien referentieposities in drie orthogonale richtingen X, Y en Z.
- Bevestig het eiwit beladen mesofase in een Hamilton spuit, voorzien doseernaald om Arm 1 van de robot (figuur 3). Volledige details van hoe de mesofase en hoe te bereiden om het te laden in de spuit zijn beschreven in de referenties 3,7-10.
- Verwijder de bovenste beschermkap van de spacer op de kristallisatie voetplaat en lijn de putten op de plaat met vertrouwenselementen op de basis-plaat platform. Let op, voor de toepassing van deze video is de beschermkap plaats gelaten om de Viewer helpen gedurende de uitlijning stap.
- Lijn de naaldpunt van de afgifte syringe met de onderkant van de bovenste goed in de linkerhoek van de kristallisatie plaat (Well A1). Dit gebeurt door het oog afstellen van de hoogte of Z-coördinaat van de afgifte arm tijdens het kijken hoe dicht de naaldpunt komt de bodem van de put. Dat de punt is gewoon contact met de bodem van de put kan worden beoordeeld door het bewegen van de plaat zijdelings op het platform terwijl heel licht instellen van de hoogte van de afgifte-arm.
- Voer in de computer van de Z-coördinaat van de afgifte-arm waar de tip contact maakt met de plaat. Dispenser geprogrammeerd plaatsvindt met de naald 80 micrometer van deze referentie Z-positie die overeenkomt met het oppervlak van de grondplaat.
- Positie door het oog van de punt van de naald in het midden van Well A1. Bewaren in de controlerende computer de referentie X, Y-coördinaat van de afgifte-arm waar de punt in het midden. Dit coördinatensysteem wordt gebruikt om het midden van de overige putten vast op de plaat.
- Prime de spuit met de juiste opdracht de robot computer dat verse mesofase zorgen vult de doseernaald en dat de eerste en volgende putten ontvangen hun volledige aanvulling van mesofase. Veeg geëxtrudeerd mesofase op de naald met een tissue.
- Start de Run Robot (X-AP) programma om een ronde van spoelstappen waar de neerslagmiddel verstrekking tips over Arm 2 van de robot worden gewassen en bereid zijn om oplossingen te zuigen uit de neerslagmiddel blok te starten.
- Activeer de afgifte functie op de robot in gang te zetten de laden van opeenvolgende putjes met eiwit beladen mesofase (meestal 50 nl) eerst een kolom van acht putjes tegelijk, gevolgd door precipitant oplossingen (gewoonlijk 800 nl). Tussen het laden kolommen, de mesofase afgifte arm terug naar een parkeerplaats waar het einde van de naald wordt in een vochtige spons om de mesofase voorkomen bij de punt uitdroogt. Het proces van afgifte mesofase en neerslagmiddel wordt herhaald11 keer over de plaat totdat de plaat is gevuld. Het laden van een 96-wells plaat met mesofase en neerslagmiddel in 5 min. in beslag.
- Zodra de plaat wordt gevuld en de robotarmen zijn teruggekeerd naar hun park posities, verwijder de plaat vanaf het dek van de robot en plaats deze op een vlakke stevige ondergrond.
- Onmiddellijk, sluit de plaat met een dekglas aan tijdsafhankelijke veranderingen in goed compositie te minimaliseren. Het is belangrijk dat alle 96 wells volledig bedekt, dat het dekglas haaks uitgelijnd met de voetplaat en dat geen van de dekglas verder dan het dekkingsgebied van de basisplaat. Een rol of brayer wordt gebruikt om een strak en een uniforme afdichting tussen het dekglas en de spacer te maken.
- Inspecteer de plaat om er zeker van de set-up ging zoals het zou moeten. Wat men op zoek is naar een 'gebakken ei op pan' verschijning in elk putje. De dooier van het ei gebakken overeenkomt met de mesofase. Het wit van het ei is het neerslagmiddel Solutiop de rand van de pan is de omtrek van de kristallisatie goed. Idealiter zijn de drie concentrische.
- Plaats de plaat in een geconditioneerde opslagruimte voor kristalgroei.
- Als er geen meer platen op te richten, het neerslagmiddel blok te verwijderen uit het dek van de robot, strak afsluit en plaats deze weer in de opslag.
- Verwijder de spuit met de mesofase van de afgifte-arm van de robot, ontmantelen, en zorgvuldig wassen bijbehorende onderdelen en doseernaald en ferrule, met methanol en droog in de voorbereiding voor volgend gebruik.
3. In Meso Robot 2. Mosquito LCP
De Mosquito LCP robot (figuur 4) bevat een soortgelijke mesofase dispenser met die van Robot 1. In tegenstelling tot Robot 1, het precipitant afgeeft via wegwerptippen. Programmeersoftware wordt gebruikt voor het instellen van het instrument voor het werken met bepaalde kristallisatie platen en Neerslagmier blokken, en door de gebruiker gedefinieerde volumes van mesofase en neerslagmiddelen afzien in een bepaalde volgorde. Deze gegevens worden door de fabrikant en worden hier niet beschreven.
- Bereid een Hamilton spuit, compleet met naald en gevuld met eiwit beladen mesofase, zoals hierboven beschreven onder Robot 1 en in Jove Artikel 1712 1.
- Klem de spuit in positie op de afgifte arm van de robot.
- Gebruik van het dek gemonteerde laser sensor om de X en Y coördinaten van de naald op de spuit vast afgifte. Dit is een belangrijke stap om ervoor te zorgen dat de mesofase nauwkeurig gedoseerd in het midden van elke put op de plaat.
- Met een druk op een knop op het bedieningspaneel, prime de spuit om mesofase verdrijven van de naald. Verwijder geëxtrudeerd mesofase uit de punt van de naald met een tissue als voorbereiding voor het gebruik van de robot putten te laden.
- Voor het plaatsen van de kristallisatie plaat op het dek van de robot vochtigeen het oppervlak van het platform met een paar druppels water om Houd de plaat plaats door capillariteit.
- Verwijder het beschermkapje van de spacer op de glazen voet-plaat en plaats het op haar platform stevig aan om een goede hechting te garanderen. Gebruik de drie vertrouwenselementen op het platform om de 3 wells hoek zodat een correcte positionering van de putten op de plaat ten opzichte van de afgifte naaldpunt lijnen. Het instrument is nu bevolen om een apotheekhoudend terecht kan komen.
- De cyclus begint met een tweede priming stap waar mesofase wordt afgegeven onmiddellijk op een klein glazen plaat alvorens ze naar de putten te vullen met verse mesofase. De robot wordt geladen met mesofase een verticale kolom van 8 putten op de plaat en gebruikt vervolgens de wegwerp tips om neerslagmiddelen oplossing afzien op de top van de mesofase bolus. Het proces wordt herhaald 11 keer over de lengte van de plaat tot alle putjes gevuld. Het hele proces duurt ongeveer 5 minuten in beslag nemen.
- Verwijderende gevulde plaat uit het platform van de robot en verzegelt het met een dekglas, zoals hierboven beschreven onder Robot 1.
- Plaats de plaat, behoren worden geëtiketteerd, in een temperatuur gecontroleerde omgeving voor kristalgroei.
4. In Meso Robot 3. Gryphon LCP
De Gryphon LCP robot (figuur 5) omvat een soortgelijk mesofase doseersysteem als hierboven beschreven voor robots 1 en 2. Wat onderscheidt van de andere twee is dat alle 96 precipitant oplossingen gelijktijdig worden afgeleverd.
- Bereid de proteïne beladen mesofase en laden in de afgifte spuit, zoals hierboven beschreven, onder Robots 1 en 2, en in Jove Artikel 1712 1.
- Klem de spuit in positie op de afgifte arm van de robot.
- Plaats de neerslagmiddel oplossing blok en kristallisatie plaat op het dek van de robot.
- Laad de 96-tip head met neerslagmiddel oplossingen. Een door de gebruiker gedefinieerde vertragingstijd wordt verstrekt te vergemakkelijken opzuigen viskeuze neerslagmiddelen.
- Beveel het instrument op een apotheekhoudend terecht kan komen. De cyclus begint met de mesofase opeenvolgend afgegeven in de 96 putjes in een proces dat ongeveer 1 min in beslag neemt. De 96-tip head verdeelt dan alle 96 oplossingen precipitant tegelijkertijd bovenop de mesofase bolussen in de kristallisatie putjes. De gehele plaat laden is voltooid in 2 min.
- Verwijder de gevulde plaat uit het platform van de robot en verzegelt het met een dekglas, zoals hierboven beschreven onder Robot 1.
- Plaats de plaat, behoren worden geëtiketteerd, in een temperatuur gecontroleerde omgeving voor kristalgroei.
5. Representatieve resultaten
Het doel van deze video artikel is om aan te tonen hoe u automatisch kristallisatie onderzoeken met een stroperige, membraaneiwit beladen mesofase in glas paneel murenh 96-well platen kristallisatie. De nadruk ligt op automatisering door middel van het gebruik van gespecialiseerde robots die een minimale handmatige interventie noodzakelijk is. Reproduceerbaarheid en nauwkeurigheid qua hoeveelheden mesofase en precipiteermiddel afgegeven en de plaatsing van beide binnen de put wordt verwacht wanneer een robot wordt gebruikt. Dit zijn belangrijke het oogpunt van doeltreffende screening van factoren die crystallogenesis ondersteunen. Ze zijn ook belangrijk voor de volgende stap in de analyse pijpleiding, die aan kristalgroei vaak gedaan evalueren beeldapparatuur. Drop of bolus locatie is de sleutel tot het beeldvormingsproces, en een onregelmatige en onjuiste plaatsing van bolus in de put meestal vereist tussenkomst van de gebruiker om te corrigeren voor en kost tijd. Ter illustratie worden voorbeelden van correct en incorrect geplaatst platen getoond in figuur 6.
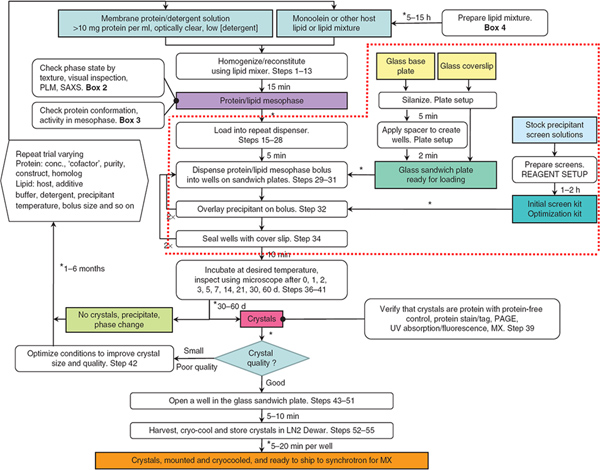
Figuur 1. Het stroomdiagram samenvatting van de stappen betrokken bij de productie, oogst-en cryo-koelen van in meso-gekweekt membraaneiwit kristallen. Stappen omgeven door de gestippelde rode lijn zijn de focus van dit Jove artikel. Robots werden gebruikt om mesofase en neerslagmiddelen oplossingen afzien in de stappen 29-32. Van referentie 3. Klik hier om een grotere afbeelding te bekijken .

Figuur 2. Een volledig geladen en verzegeld 96-well glas sandwich kristallisatie plaat. Elke well bevat 50 nl kubieke fase en 1 pl neerslagmiddel oplossing. Voor de duidelijkheid is de kubische fase zijn gekleurd met Sudan Red en het precipiteermiddel oplossing bevat methyleenblauw. Van Reference 5.
_upload/4000/4000fig3.jpg "alt =" Figuur 3 "/>
Figuur 3. Het in meso robot (Robot 1). De robot heeft twee armen. Arm 1 verdeelt het eiwit beladen lipide mesofase. Arm 2 verdeelt neerslagmiddel oplossingen. Tijdens het vullen van de 96-well plaat blijft gefixeerd op het dek van de robot die zelf stilstaat. De twee armen naar mesofase en neerslagmiddel oplossingen te leveren. Van referentie 3.

Figuur 4. De Mosquito LCP robot (Robot 2). In tegenstelling tot Robot 1, het dek van de Mosquito LCP, waarop zitten de 96-well plaat en het precipiteermiddel oplossing blok beweegt horizontaal tijdens het vullen.

Figuur 5. De Gryphon LCP robot (Robot 3). Tijdens eenopgericht, de lipide kubieke fase dispenser wordt verplaatst naar eiwit beladen mesofase te leveren op de 96-well plaat. Het dek vertaalt vervolgens horizontaal om de plaat te positioneren onder de neerslagmiddel oplossing tip hoofd. Alle 96 precipitant oplossingen gelijktijdig afgegeven. Foto afkomstig van de fabrikant ( http://www.artrobbins.com/ ) en geëtiketteerd.

Figuur 6. Een volledig geladen en verzegeld 96-well glazen sandwichplaat (A) en putjes goed (B) en incorrect (C, D) gevuld worden met de in meso robot (Robot 1). De barcode op de plaat in A wordt gebruikt om de plaat volgen in de plaat incubator / beeldapparaat. In panelen BD, neerslagmiddel oplossing en mesofase zijn gemarkeerd P en M, respectievelijk. De verwachte 'gebakken ei op pan'uiterlijk van de put in B is kenmerkend een wijze geladen en afgedicht. In C is het neerslagmiddel is afgegeven in de put verkeerd in een excentrische positie en in contact is gekomen met de spacer. In C, zou het ook blijken dat de hoeveelheid mesofase is dan zou moeten zijn. Een voorbeeld van incomplete belading met precipiterende oplossing wordt in D. schaal de diameter van putten is 6 mm.
Discussion
In dit artikel video we hebben aangetoond hoe een robot automatisch opgericht in meso kristallisatie trials in 96-well platen sandwich glas met een proteïne beladen lipide mesofase. De robots die in dit werk zijn speciaal ontworpen om een positieve verplaatsing glazen spuit voor nauwkeurige en reproduceerbare levering van nanoliter volumes van de viskeuze en kleverige mesofase omvatten, zoals oorspronkelijk beschreven 7.
Nauwkeurigheid en precisie zijn belangrijke kenmerken van een robot. Echter, deze kenmerken zijn zo goed als de mate en regelmatigheid die robot prestatie wordt geëvalueerd en kalibratie wordt uitgevoerd. Het spreekt vanzelf dat de uitvoering van de robot moet worden geëvalueerd terwijl de individuele platen opgezet. Het is niet gepast om aan te nemen dat de robot foutloos zal functioneren en om de robot te verlaten nooit onbewaakt achter. De attente en oplettende bestuurder moet in een posbankwezen in om op te merken door een geluid of een verschijning als er iets niet goed werkt en onmiddellijk corrigeren. Voorts wordt elke plaat zorgvuldig gecontroleerd op het oog van een uniforme inhoud en zodra de plaat is afgesloten en alvorens deze opgeborgen voor kristallisatie trials. Dit vereist alleen een paar seconden te voeren en kan worden uitgevoerd terwijl de volgende plaat wordt geladen. Te merken, bijvoorbeeld, is het betreffende putten zijn niet goed gevuld wijzen op het feit dat een bepaalde neerslagmiddel doseertip werkt niet goed. Indien levering van mesofase worden gezien als onregelmatig, zou de relevante defect onderdeel moet onmiddellijk worden gecorrigeerd. Door op te merken deze kwesties en het maken van de aanpassingen tijdens de set-up bespaart tijd en materialen, met inbegrip van waardevolle lipiden en membraan eiwit. Als een imager wordt gebruikt om kristalgroei te volgen, kan de nauwkeurigheid en precisie ook worden gecontroleerd tijdens beeldvorming. Bijvoorbeeld, systematische problemen met drop of boluslocatie door de imager aan te geven dat er iets niet klopt en dat corrigerende maatregelen ergens stroomopwaarts in het protocol nodig is.
In het belang van betrouwbare prestaties dus de robot moet worden gekalibreerd op een regelmatig schema en als dat nodig is. Kalibraties moeten omvatten hoeveelheid precipitatiemiddel en mesofase en geleverd als bolus en precipiteermiddel plaatsing in de put. Uiteraard moet zoveel mogelijk kalibratie worden uitgevoerd met volumes en materialen vergelijkbaar met die die wordt gebruikt in proeven die in de periode van de kwaliteitscontrole.
Net zo belangrijk als de kalibratie is zo ook is in voorraad hebben voor een voldoende aanbod van robot onderdelen en benodigdheden. Katastrofisch en onverwachte storingen, blokkades en crashes kunnen en doen optreden. In dat geval kunnen beschikken over een vervangende precipitatiemiddel productietijd tip bijvoorbeeld zou kunnen betekenen dat een zeer waardevolle membraaneiwit preparaat gebruikt zoals het hoort enniet verspild.
Enkele van de voordelen van een robot is het feit dat het in hoofdzaak continu werken en dat het niet lijdt of "klagen" vermoeidheid. Een robot kan ook worden gebruikt onder omstandigheden die niet als mensvriendelijke, zoals in het donker, onder gecontroleerde verlichting en omgevingsomstandigheden en bij extreme temperaturen. De robots laten zien in dit artikel zijn alle gebruikte onder omgevingsomstandigheden bij ~ 20 ° C. Er zijn echter eiwitten en projecten die niet omgevingstemperaturen lichtpunt 11,12 en een oxiderende of reducerende omgeving 13 vereisen. Al deze kunnen worden opgevangen, met relatief gemak, wanneer er een kristallisatie robot wordt gebruikt.
In een eerder Jove video artikel zullen we laten zien hoe kristallisatie onderzoeken door de in meso-methode zijn opgezet handmatig instellen 1. De minimale hoeveelheid mesofase op betrouwbare wijze kan worden afgezien van de hand beperkt is by de gezichtsscherpte en gestage handigheid van de persoon het opzetten van de proeven. In onze ervaring, zijn volumes van mesofase zo laag als 100 nl gemakkelijk behandeld. We weten van een lab waar de standaard volume afgegeven handmatig is ongeveer 40 nl. Echter aanzienlijk kleinere volumes mogelijk met een robot. Afzonderlijk, hebben we aangetoond dat mesofase volumes zo laag als 550 picoliter kunnen robot 14 worden afgegeven. Van dat werk was het duidelijk dat verdere miniaturisering van robot mogelijk die, indien toegepast, zou leiden tot een aanzienlijke vermindering in de hoeveelheid waardevolle membraaneiwit benodigd zijn om een kristallisatie proces.
In deze video artikel werden drie commercieel verkrijgbare robots gebruikt om high-throughput membraaneiwit kristallisatie met behulp van lipide mesofasen aan te tonen. De eerste van deze is ontwikkeld in de MS & FB Group op basis van onze ervaring het opzetten van trials handmatig, zoals beschreven in Jove 1712 1. Dit is het instrumentment hebben we het meest vertrouwd zijn met en het grootste deel van het huidige artikel is gewijd aan het gebruik ervan. De andere twee robots waren op demonstratie in de MS & FB Group op het moment dat het artikel is geschreven en de relevante beeldmateriaal is hier opgenomen in het belang van volledigheid. Alle drie de robots maken gebruik van zeer veel hetzelfde mesofase doseersysteem, het wezenlijke kenmerk van wat een positieve verplaatsing glazen injectiespuit 5,7. Ze verschillen het meest significant met betrekking tot precipiterende levering. Robots 1 en 2 tegelijkertijd afgeven precipitant in 8 putjes, een kolom op een kristallisatie plaat tegelijk. In tegenstelling, Robot 3 verdeelt alle 96 neerslagmiddelen oplossingen in een enkele actie. Robot 2 is het enige instrument met een besteedbaar neerslagmiddel doseren tips. Er zijn voor-en nadelen van de verschillende instrumenten die afhankelijk van de specifieke toepassing, zullen deze niet nader hier. Volstaat de vaststelling dat alle drie de werken zeggen en hebben geproduceerd kristallen van mijmbrane eiwitten in de meso methode.
De volgende stappen in het totale proces van de structuurbepaling van macromoleculaire kristallografie zijn om te oogsten en te cryo-cool kristallen van platen opgezet, zoals beschreven in deze video artikel en om op te nemen en te verwerken röntgendiffractie van hen. Deze onderwerpen worden behandeld in aparte Jove artikelen in deze serie 1,15.
Disclosures
Geen belangenconflicten verklaard.
Acknowledgments
Er zijn velen die hebben bijgedragen aan dit werk en de meeste zijn uit de membraan structuur-en Functionele Biologie Groep, zowel in het verleden en huidige leden. Als u alle breiden we onze hartelijke dank en waardering. Dit werk werd gedeeltelijk ondersteund door subsidies van Science Foundation Ierland (07/IN.1/B1836), de National Institutes of Health (GM75915, P50GM073210 en U54GM094599), en KP7 COST Action CM0902.
Materials
| Name | Company | Catalog Number | Comments |
| Brayer (roller) | Fisher Scientific | 50820937 | Tool |
| Gas-tight syringes | Hamilton | 81030 | Tool |
| Glass coverslips | Marienfeld | 01029990911 | Disposable |
| Glass plates | Marienfeld | 1527127092 | Disposable |
| Gryphon LCP Robot | Art Robbins | NA | Tool |
| In meso robot | Anachem/Gilson | NA | Tool |
| Lab notebook | Various | NA | Tool |
| Mosquito LCP Robot | TTP Labtech | NA | Tool |
| Perforated double-stick spacer tape | Saunders Corporation (hole-punched) | customized | Disposable |
| Precipitant solutions | Various | Various | Reagent |
| Purified water | Millipore | NA | Reagent |
| Rain-X | Shell Car Care | 80199200 | Reagent |
| Syringe tips | Hamilton | 7770-020 (gauge 22) | Tool |
| Tissues | Various | Various | Disposable |
| Water bottle | various | NA | Reagent |
References
- Caffrey, M., Porter, C. Crystallizing membrane proteins for structure determination using lipidic mesophases. J. Vis. Exp. (45), e1712 (2010).
- Cherezov, V., Caffrey, M. Nano-volume plates with excellent optical properties for fast, inexpensive crystallization screening of membrane proteins. J. Appl. Crystallogr. 36, 1372-1377 (2003).
- Caffrey, M., Cherezov, V. Crystallizing membrane proteins using lipidic mesophases. Nat. Protocols. 4, 706-731 (2009).
- Liu, W., Cherezov, V. Crystallization of membrane proteins in lipidic mesophases. J. Vis. Exp. (49), e2501 (2011).
- Cherezov, V., Peddi, A., Muthusubramaniam, L., Zheng, Y. F., Caffrey, M. A robotic system for crystallizing membrane and soluble proteins in lipidic mesophases. Acta Crystallogr. D Bio.l Crystallogr. 60, 1795-1807 (2004).
- Peddi, A. High-throughput automated system for crystallizing membrane proteins in lipidic mesophases. IEEE Trans. Autom. Sci. Eng. 4, 129-140 (2007).
- Cheng, A., Hummel, B., Qiu, H., Caffrey, M. A simple mechanical mixer for small viscous lipid-containing samples. Chem. Phys. Lipids. 95, 11-21 (1998).
- Caffrey, M. Crystallizing membrane proteins for structure-function studies using lipidic mesophases. Biochem. Soc. Trans. 39, 725-732 (2011).
- Caffrey, M. Crystallizing membrane proteins for structure determination: use of lipidic mesophases. Annu. Rev. Biophys. 38, 29-51 (2009).
- Caffrey, M. Membrane protein crystallization. J. Struct. Biol. 142, 108-132 (2003).
- Gushchin, I., Reshetnyak, A., Borshchevskiy, V., Ishchenko, A., Round, E., Grudinin, S., Engelhard, M., Buldt, G., Gordeliy, V. Active State of Sensory Rhodopsin II: Structural Determinants for Signal Transfer and Proton Pumping. J. Mol. Biol. 412, 591-600 (2011).
- Jordan, P., Fromme, P., Witt, H. T., Klukas, O., Saenger, W., Krauss, N. Three-dimensional structure of cyanobacterial photosystem I at 2.5 angstrom resolution. Nature. 411, 909-917 (2001).
- Grawert, T., Span, I., Eisenreich, W., Rohdich, F., Eppinger, J., Bacher, A., Groll, M. Probing the reaction mechanism of IspH protein by x-ray structure analysis. Proc. Natl. Acad. Sci. USA. 107, 1077-1081 (2010).
- Cherezov, V., Caffrey, M. Picolitre-scale crystallization of membrane proteins. J. Appl. Crystallogr. 39, 604-606 (2006).
- Li, D., Boland, C., Aragao, D., Walsh, K., Caffrey, M. Harvesting and cryo-cooling crystals of membrane proteins grown in lipidic mesophases for structure determination by macromolecular crystallography. J. Vis. Exp. (67), e4001 (2012).
