

Introduction
רובוטי Soft עוררו התעניינות מחקרית רבה בקרב קהילת רובוטיקה והם שמשו משימות פונקציונליות שונות כגון תנועה גלית בסביבות מובנהיות 1 מרתק 2. הם מורכבים בעיקר של חומרים רכים אלסטומרי ובשליטת טכניקות actuation שונים באמצעות שימוש בחומרים שונים כגון פולימר electroactive (EAP), סגסוגות זיכרון (SMA), או דחוס נוזל 3. EAPs פונקציה מבוסס על מתח הפרש שגורם כוחות אלקטרוסטטיים לייצר זנים פעילים ובכך מייצרים actuation. השפעת זיכרון צורה המוזרה של SMAs נפרסה על מנת ליצור את actuation הרצוי מבוסס על הדור בתוקף במהלך טרנספורמציות בשלב על השינוי בטמפרטורה. לבסוף, טכניקה להפעלה ללא נוזל דחוס מקלת אסטרטגית עיצוב פשוט להשרות הבדל נוקש ומפעילים הרכים, כך האזורים התואמים יותר יהיו לנפחעל לחץ קבוע. רובוטים רכים נועדו להרחיב את היישומים של רובוטים קשיחים מסורתיים, במיוחד ביישומים בם חפצים עדינים מעורבים. במיוחד, במאמר זה, אנו מציגים הגישה הייחודית שלנו בפיתוח grippers רובוטית רך עבור מניפולציה כירורגית עדינה.
מרתק כירורגים הוא היבט חשוב מעורב הליכי כירורגיים רבים כגון כבד, גינקולוגיה, אורולוגית, וניתוחים לתיקון עצב 4, 5. הדבר מתבצע בדרך כלל על ידי כלים מרתקים רקמה נוקשה, פלדה כגון מלקחי graspers לפרוסקופי לצורך ההקלה תצפית, כריתה, נהלי השקה, וכו 'עם זאת, בזהירות רבה נדרשת כפי הכלים המרתקים הקונבנציונליים עשויים מתכת שעלולה לגרום באזורי ריכוז מתח הגבוה בתוך הרקמה הרכה בנקודות המגע 6. בהתאם לחומרת הנזקים רקמות, סיבוכים שונים, כגון כאב, ו רקמת צלקת פתולוגיתormation, ואף נכות צמיתה, עלולים לפרוץ. מחקר קודם דווח כי שיעור הסיבוכים בניתוחים עצבים היקפיים היה 3% 7. לכן, הרעיון של מרתק רך שיכול לספק אחיזה תואמת בטוחה יכול להיות מועמד מבטיח עבור מניפולציה כירורגית עדינה.
כאן, אנו מציגים שילוב של 3D-דפוס וטכניקות ליתוגרפיה רכה שונות, אשר אמצו גישה מבוססת-מוט, לפברק grippers פנאומטי רובוטית רך להתאמה אישית. טכניקת ייצור מסורתית של רובוטים ללא אלכוהול על בסיס להפעלה ללא נוזל דחוס דורשת עובש עם ערוצי פנאומטי מודפסים עליו תהליך איטום לאטום את הערוצים 8. עם זאת, זה לא ריאלי עבור רובוטים רכים מיניאטורי אשר צריכים ערוצי פנאומטי קטנים שבו חסימה של ערוצים יכולה לקרות בקלות בתהליך האיטום. הטכניקה המסורתית דורשת אטימת ערוצי פנאומטי להיעשות על ידי מליטת שכבת איטום צופה אליו. לפיכך, להyer של חומר אלסטומרי אשר בתחילה משמש כשכבת מליטה עשוי לשפוך לתוך תעלות זעירות לחסום אותם ערוצים. כמו כן לא ניתן למקם את ערוצי פנאומטי באמצע המבנה ולהתחבר מרכיב חדר באמצעות טכניקות קונבנציונליות. הגישה המוצעת מאפשרת יצירת ערוצי פנאומטי מיניאטורי המחובר מוטה באמצעות לילה מלא באוויר ואינו דורשת איטום של התעלות הזעירות. בנוסף, התא המחובר ערוצי פנאומטי לשמש מקור אוויר שאינו דורש מקורות אוויר חיצוניים להפעלה ללא נוזל דחוס. היא מאפשרת היא את מדריך מצבי שליטה רובוטית באמצעות הקלת הדחיסה הקאמרית להניע המרכיב המרתק, ובכך לספק למשתמשים את האפשרות של שליטה על כמות הכח שהם מגישים בקשה דרך תפסן. גישה זו להתאמה אישית וניתן להשתמש בו כדי לפברק סוגים שונים של עיצובי תפסן רכים כגון grippers עם יחיד או muרובים של נשק actuatable.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
הערה: כל grippers פנאומטי הרך היו מפוברק על ידי יציקת תערובות אלסטומרי מבוסס סיליקון לתוך תבניות 3D מודפס אישית, שבאו לאחר תהליך ייצור מורכב משלושה שלבים: קריצת רכיבי תפסן-זרוע עם ערוצי פנאומטי מוטבעים, קריצת רכיב תא מחובר ערוצי פנאומטי , ואיטום מרכיב בתא מלא אוויר.
1. הכנת אלסטומרים
- מניחים במיכל עבור מערבל בסולם במשקל הטרה זה. יוצקים חלקים א 'וב' של אלסטומר מבוססי סיליקון בתוך המיכל עם 1: יחס משקל 1.
- מכסים את המיכל ולמדוד את המשקל הכולל.
- מניחים את מיכל חומר לערבל צנטריפוגלי. התאם את איזון המשקל על המערבל למשקל נמדד צעד 1.2.
- הגדר את מצבי ערבוב-אוורור דה 2,000 סל"ד ו -2,200 סל"ד בהתאמה למשך 30 שניות. מערבבים את המרכיבים אלסטומר ביסודיות כדי להשיג ריפוי אחיד.
הערה: הגיאומטריה של העובש תשתנה בהתאם לדרישות הספציפיות עבור יישומים שונים. השלבים הבאים ממחישים שלבים עיקריים כלליים בתוכנות CAD הנדרשים כדי ליצור את הרכיב הקאמרי תפסן של העובש.
- עיצוב תבניות ואיטום עובש באמצעות תוכנת תכנון בעזרת מחשב (CAD). ראה איור 1 עבור ממדי גיאומטריה וספציפי של התבניות בשימוש כתב היד הזה.
- עיצוב של תיבת הגבול החיצונית
- לחץ לחיצה ימנית על המטוס העליון ולחץ על "רגיל עד" על מנת לנרמל למישור העליון.
- לחץ על "סקיצה" בפינה הימנית העליונה כדי לפתוח חלון "סקיצה". לאחר מכן, לחץ על הכפתור "הסקיצה" על הפינה השמאלית העליונה של סרגל הכלים לצייר בסיס מלבני של רכיב קאמרי.
- הקישו על התכונה "המימד חכם", הנמצא ליד כפתור "סקיצה", להגדיר skממדים לחרוט. ודא כי הסקיצה מוגדרת באופן מלא (כלומר, כל ציור הקווים להיות שחורים) ויוצא הסקיצה בסיום.
- לחצו על החלון "מאפיינים". לאחר מכן, לחץ על "בוס Extruded / בסיס" תכונה כדי למתוח קווי מתאר שנבחרו-Y הכיוון.
- הקש על המשטח העליון של המודל והמיון קפדן מטוס הסקיצה. שרטט מלבן ולהגדיר את הממדים כמתוארים 2.1.1.2 ו 2.1.1.3.
- לחצו על החלון "מאפיינים". לאחר מכן, לחץ על התכונה "Extruded Cut" כדי למתוח לחתוך חלל ליציקת אלסטומרים (איור 2 א). ודא כי עובי הקיר הוא 2.5 מ"מ.
- עיצוב של החדר הפנימי
- לחץ לחיצה ימנית על פני השטח על Y-לכיוון אזור הפתיחה. לאחר מכן, לחץ על "רגיל עד" כדי לנרמל משטח.
- לאחר מכן, לחץ על החלון "סקיצה" לצייר מלבן עבור רכיב תא כמתואר בשלבים 2.1.1.2 ו2.1.1.3.
- לחצו על החלון "מאפיינים". לאחר מכן, לחץ על "בוס Extruded / בסיס" תכונה כדי למתוח את הרכיב הקאמרי-בכיוון Y (איור 2 ב).
הערה: עומק קיצוץ צעד 2.1.1.6 הוא 2.5 מ"מ גדול יותר בסיס מעוקם זה.
- עיצוב של רכיב תפסן
- הקש על פני השטח של מודל X-כיוון שלילי ומיון קפדן מטוס סקיצת רכיב תפסן. צור מלבן בחלון "סקיצה" כמתואר בשלבים 2.1.1.2 ו 2.1.1.3.
- לחצו על החלון "מאפיינים". לאחר מכן, לחץ על "בוס Extruded / בסיס" תכונה כדי למתוח את קווי המתאר שנבחר ב X-בכיוון השלילי.
- הקש על המשטח העליון של רכיב תפסן כדי והמיון קפדן מטוס הסקיצה. יצירת צורה של תפסן בחלון "הסקיצה" (איור 2 ג) וצא הסקיצה כאשר הממדים מוגדרים באופן מלא כמתואר בשלבים 2.1.1.2ד 2.1.1.3.
- לחצו על החלון "מאפיינים". לאחר מכן, לחץ על "Cut Extruded" לחתוך חלל ליציקת אלסטומרים ברכיב תפסן. ודא כי עובי הקיר הוא 2.5 מ"מ.
- עיצוב של הקשר בין קאמרי תפסן
- צור מלבן בחלון "סקיצה" על המשטח העליון של קטע המוזיקה הקאמרית כמתואר 2.1.1.2 ו 2.1.1.3.
- לחצו על החלון "מאפיינים". לאחר מכן, לחץ על "Cut Extruded" כדי ליצור חיבור בין הרכיבים הקאמריים תפסן (איור 2 ד).
- עיצוב של ערוצי פנאומטי
- צור 1.5 מ"מ עיגולים בקוטר על פני השטח של קטע המוזיקה הקאמרית ב X-בכיוון החיובי כמתואר בשלבים 2.1.1.2 ו 2.1.1.3.
- לחצו על החלון "מאפיינים". לאחר מכן, לחץ על "Cut Extruded" ליצור ערוצי להכנסה מוטות תיל (איור 2E). ודא חולes אינם ביקע את רכיב תפסן.
- עיצוב של תיבת הגבול החיצונית
- בשנת קובץ CAD נפרד, לצייר עובש איטום עם חור של אורך ורוחב כי הם 1 מ"מ יותר גדול הממדים החיצוניים של רכיב לשכת תפסן. הערה: עובי הקיר הוא 2.5 מ"מ.
- לחצו על החלון "סקיצה" כדי ליצור מלבן במישור העליון כמו השלבים המתוארים 2.1.1.2 ו 2.1.1.3.
- לחצו על החלון "מאפיינים". לאחר מכן, לחץ על "בוס Extruded / בסיס" תכונה כדי למתוח קווי מתאר שנבחרו-Y הכיוון.
- הקש על הפאה העליונה של המודל והמיון קפדן מטוס הסקיצה. שרטט מלבן ולהגדיר את הממדים כמתוארים בשלבי 2.1.1.2 ו 2.1.1.3).
- לחצו על החלון "מאפיינים". לאחר מכן, לחץ על התכונה "Extruded Cut" כדי למתוח לחתוך חלל ליציקת אלסטומרים. ודא כי עובי הקיר הוא 2.5 מ"מ.
- שמור כל חתיכת עובש בתור קובץ STL להדפסת 3D. טען את קובץ STL לתוך מדפסת 3D עם רזולוציה של 30 מיקרומטר ולהדפיס את חתיכות עובש 9.
- הסר את כל חומרי תמיכה על חתיכות עובש לשטוף את חתיכות עובש עם מים.
3. Soft יחיד / זוגי-actuatable Grippers פניאומטיים Arm
- דפוס רכיבי תפסן-זרוע עם ערוצי פנאומטי מוטבעים
- הכנס שתי אבנית קאמרית 3D מודפס על צד השמאל וימין של הרכיב הקאמרי (איור 3 א) על מנת ליצור בתא אטום עם ערוצי פנאומטי המחוברים אליו.
- הכניסו שתי מוטות תיל טיטניום 1.5 מ"מ בקוטר דרך תא, שמירת מרחק 2 מ"מ מקצות תפסן ליצור ערוצי פנאומטי (איור 3 א). הערה: השתמש מוט תיל אחד עבור תפסן חד actuatable-זרוע.
- יוצקים את התערובת לתוך התבנית אלסטומרי למלא את רכיב תפסן מלא.
- ודא שאין בועות אוויר גלויות נוכחיות.
- placדואר את התבנית לתוך תנור ריפוי ב 60 מעלות צלזיוס במשך 10 דקות. לאחר אלסטומר הוא נרפא, להסיר את התבנית מהתנור.
- רכיב דפוס חדר מחובר ערוצי פנאומטי
- משוך את מוטות התיל השני קאמריים-בלוקים החוצה מהתבנית.
- מניחים 3D מודפס תפסן-בלוק על גבי רכיב תפסן כדי ליצור תא (איור 3 ב). הכנס את מוטות החוט לחסום את החורים בקיר של העובש.
- יוצק את התערובת לתוך התבנית אלסטומרי למלא את החלק הנותר של רכיב קאמרי להבטיח שאין בועות אוויר גלויות הלכוד בתוך העובש.
- לרפא את החלק בטמפרטורה של 60 מעלות צלזיוס במשך 10 דקות. הסר את התבנית מהתנור פעם אלסטומר הוא נרפא.
- הסר את בלוק תפסן demold תפסן נרפא לחלוטין עם מבנה תא.
- איטום מרכיב בתא מלא אוויר
- יוצקים את התערובת לתוך התבנית אלסטומרי איטוםלרפא אותו ב -60 מעלות צלזיוס במשך 10 דקות.
- מברישים בשכבה של חומר אלסטומרי על 2.5 מ"מ נרפא איטום שכבה. מניח את תפסן נרפא עם מבנה תא על גבי שכבת האיטום המצופית ואג"ח שני החלקים (איור 3 ג).
- בהמשך לכך, לרפא את המבנה כולו מלא ב 60 מעלות צלזיוס במשך 15 דקות.
- Demold המכשיר תפסן רובוטית רך לגמרי נרפא.
4. קלטי התקן גריפר פניאומטיים רובוטית רך לתוך כלי טיפול
- עיצוב כלי הטיפול כמתואר בקובץ משלימת 1 באמצעות תוכנות CAD ולשמור אותו קובץ STL. ראה איורים 4 ו -5 עבור הממדים של הכלים.
- טען את קובץ STL במדפסת 3D ולהדפיס את חתיכות עובש 9.
הערה: כל שלבי ההדפסה עבור כלי טיפול שליטה ידניים, כובע מלבני, בוכנת מטלטלין (איור 4) יכולים להסתיים בתוך 3 שעות 48 דקות. יחסי ציבורזמן inting בודה שליטה רובוטית טיפול כלי וכובע מלבני (איור 5) הוא 1 hr 56 min. הצגת קובץ משלים 2 לקבלת הוראות פעולת מדפסת 3D. - לקלף כל חומר תמיכה על הכלים לאחר ההדפסה תושלם. לאחר מכן, לשטוף את הכלים במים.
- הכנס את תפסן לכלי טיפול שליטה הידני (איור 4 א) ולכסות את אזור הפתיחה עם כובע מלבן מטלטלין (האיור 4B).
- הכנס בוכנה מטלטלין (איור 4C) כדי להקל דחיסה קאמרית.
- הכנס את תפסן מפעיל ליניארי לתוך כלי טיפול שליטת רובוטית (איור 5 א). הערה: המפעיל ליניארי מחליף את בוכנת מטלטלין במצב שליטה ידנית לדחיסה קאמרית.
- מכסה את אזור הפתיחה עם כובע מלבן מטלטלין (איור 5).
ערכות 5. מבחן גריפ דחיסה
- להעריךאת הפונקציונליות של תפסן הרך על ידי ביצוע בדיקות מרתקות עם חוט מגשר.
- מניחים חוט מגשר על השולחן.
- התאם תפסן כך את החוט נמצא בין משתי זרועות תפסן.
- הזז את הבוכנה מטלטלין לדחוס לתא כדי להניע את הזרועות תפסן כדי להחזיק את החוט.
הערה: רק כלי טיפול השליטה הידניים משמשים בהפגנה המרתקת. - חזק ולהעביר את חוט קופסא הממוקמת 20 סנטימטרים הרחק מהמיקום המקורי של החוט.
- מניח נגד חישת כוח מכויל בין שתי הלסתות של תפסן. ודא את אחיזת לסתות תפסן על אזור החישה. הערה: הקוטר של אזור החישה היא 14.7 מ"מ.
- דחיסת התא כדי להניע את זרועות תפסן כדי להשתלט על נגד חישת כוח.
- מדוד את כוחות דחיסת אחיזה מקסימלית כי grippers פנאומטי הרך חד actuatable-יד פעמים actuatable הזרוע יכול ליצור כמתואר 10.
הערה: ערכי ההודעה יוצגו על מחשב נייד. כוחות דחיסת אחיזה מקסימלית נמדדים בנקודת לחץ מקסימאלי שערוצי פנאומטי יכול לעמוד. - חותך את הלסתות מרתקות אלסטומרי בודד מתוך תפסן פנאומטי רך פעמים actuatable-זרוע.
- הכנס את טיפי המלקחיים לתוך ערוצי פנאומטי של הלסתות המרתקות אלסטומרי.
- מניח נגד חישת כוח מכויל בין שתי הלסתות של המלקחיים.
- מדוד את כוחות דחיסת 10 שנוצרו על ידי מלקחיים מצופי אלסטומר מלקחיים במהלך ניתוח עצב מדומה שערך נוירוכירורג.
הערה: הנוירוכירורג מפעיל כוח כי הוא דומה למה שהוא חל בדרך כלל במהלך ניתוח בפועל על נגד חישת כוח. - ממוצע הנתונים המתקבלים חמישה מחקרים בכל מבחן.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
המכשירים תפסן פנאומטי רובוטית הרכים היו מסוגלים להרים חפצים עם ממדים של עד 1.2 מ"מ קוטר (איור 6). כוח דחיסת האחיזה מקסימלית שנוצר על ידי actuatable הזרוע חד, ובבדיקת actuatable זרוע התקני תפסן רכים היו 0.27 ± 0.07 N ו- 0.79 ± 0.14 N בהתאמה, לעומת 1.71 ± 0.16 N ו- 2.61 ± 0.22 N כוחות דחיסה ניתוח מדומה על ידי המלקחיים מצופים אלסטומר ועל ידי מלקחיים ללא ציפוי (איור 7). כוחות האחיזה עשוי להשתנות תלוי בגיאומטריה של grippers ואת גודל של הערוצים פנאומטי. את מאפייני החומר של אלסטומר יקבעו את הלחץ המקסימאלי שערוצי פנאומטי יכול לעמוד, אשר בתורו ישפיע על כוחות האחיזה. הטכניקה המוצעת (איור 3) מראה כי יצירה בעלות נמוכה של תפסן פנאומטי רך בזמן ייצור מהיר הוא נעשה בלתי אפשרי,ד את הפונקציונליות של grippers כגון הוערכה במחקר זה. באמצעות הטכניקה המתוארת, ייצור של עיצובי תפסן שונים עבור יישומים שונים ניתן להשיג על ידי תבניות עיצוב מקבילות ליציקת אלסטומר.
תוצאות אלה הראו כי מרתקים תואמים, ללא ההקדמה של מאמץ מוגזם לאובייקט לפת, הוא בר השגה עם טכניקת הייצור המוצעת. ההסתגלות של זרועות תפסן הרכות מותרת הזרועות כדי להתאים את קווי מתאר פני השטח של האובייקט. עם זאת, יש צורך להבטיח כי מרתק מאובטח לא נפגע כאשר אחיזה תואמת מושגת. אחיזה כי הוא גם תקיף תואם הוא חיוני עבור מרתק יישומים במיוחד בכירורגיה. התוצאה ניתן לנתח עוד יותר על ידי ניסויים העכבר הטייס להעריך את הביצועים של תפסן רך מחזיק העצב של העכבר כדי לבחון את מידת הנזק שבוצעו העצב כאשרתפסן הרך משמש לעומת כאשר הם משמשים מלקחיים.

ציורים איור 1. CAD 2D של תבניות בשימוש בודה המבנה העליון של מכשירים תפסן פנאומטי רובוטית רך אלסטומרי: (א) פעמיים actuatable-זרוע, ו- (ב) actuatable זרוע חד (בכל הממדים הם במ"מ). עובי הקיר הוא 2.5 מ"מ עבור כל התבניות. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.

איור 2. יצירת עובש CAD. (א) Extrude לחתוך חלל ליציקת אלסטומרים. (ב) יצירת רכיב קאמרי molד. (ג) יצירת חלל ליציקת אלסטומרים עבור רכיב תפסן. (ד) Extrude לחתוך קשר בין קאמרי רכיב תפסן. (E) Extrude לחתוך שני חורים להחזקת מוטות תיל כדי ליצור ערוצי פנאומטי. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.

תהליך ייצור איור 3. של תפסן פנאומטי הרך פעמים actuatable-הזרוע. (א) מניח שני קאמריים-בלוקים וכנס שתי מוטות תיל כדי ליצור ערוצי פנאומטי המחוברים בתא. יוצקי אלסטומר לתוך התבנית באופן מלא לרפא את המרכיב המרתק. (B) הסר את מוטות תיל קאמריים-בלוקים לשים בלוק תפסן על גבי הרכיב המרתק כדי creat תא דואר. יוצקי אלסטומר לתוך התבנית כדי להפוך את הרכיב הקאמרי. (C) בונד מבנה תפסן ו -2.5 שכבת מ"מ יחד כדי ליצור תא אוויר מלא אטום. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.

איור 4. ציורים 2D CAD של טיפול כלים במצב שליטה ידנית על מנת להקל דחיסה קאמרית (א) כלי טיפול, (B) כובע מלבני, ו- (ג) בוכנה מטלטלין (בכל הממדים הם במ"מ ואת קנה המידה הוא 2: 3. אלא אם צוין). נא ללחוץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
"1"> 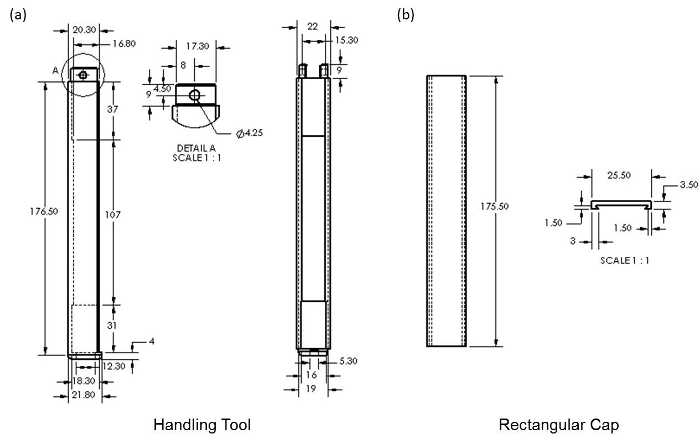
איור 5. ציורים 2D CAD של טיפול כלים במצב שליטה רובוטית כדי להקל דחיסה קאמרית (א) כלי טיפול, ו (ב) כובע מלבני (בכל הממדים הם במ"מ ואת קנה המידה הוא 2: 3 אלא אם צויין).. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.

איור 6. הערכה מרתקת בדיקות של מכשירי תפסן המוצעים. תצלומים של הרובוטים (א) הרך חד actuatable-זרוע, ו- (ב) מכשירי תפסן פנאומטי פעמי actuatable זרוע לפני (משמאל) עם (מימין) אוחז 1.2 מ"מ חוט בקוטר.
לשמור-together.within-page = "1"> 
איור 7. גריפ כוחות דחיסה שנוצרו על ידי שני מכשירי תפסן פנאומטי רובוטית רכים השונים, ושתיים (אלסטומר מצופה ללא ציפוי) מלקחיים במבחן דחיסת אחיזה. כוח חישת נגד הוצב בין שתי הלסתות של תפסן / מלקחיים ואת תפסן / מלקחי לסתות אחיזה באזור החישה בכל מבחן. ברי השגיאה מייצגים סטיית התקן.

ציורים איור 8. CAD 2D של תבניות בשימוש בודה המבנה העליון של תפסן פנאומטי רובוטית רך וו. הערוץ פנאומטי ממוצבת קרוב לפני השטח התחתון של רכיב וו מרתק וזה יהיה לכופף כלפי מעלה על שמירת לחץ.
ether.within-page = "1"> קובץ משלים 1. עיצוב של כלי הטיפול. פרטים צעדיים על העיצוב של טיפול הכלים מעורבים תוכנות CAD. אנא לחץ כאן כדי להוריד את הקובץ.
קובץ 2. 3D מדפסת מדריך למשתמש משלים. מדריך למשתמש זה מספק הוראות להפעלת המדפסת. אנא לחץ כאן כדי להוריד את הקובץ.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
אנחנו הוכחנו בהצלחה כי מכשירי תפסן פנאומטי רובוטית הרכים המותרים מרתק תואמת של אובייקטים, אשר הפעילו הרבה כוחות דחיסה נמוכים על האובייקט אחז מאשר טיפי מלקחיים מצופי אלסטומר מלקחיים מופעלים. מלקחיים הם כלי חיוני עבור מניפולציה עצבה במהלך תיקון עצב היקפי ניתוחי 11, 12. עם זאת, המבנה המתכתי שלה מחייב זהירות קיצוניות בשימוש מן המנתחים על מנת למנוע ניזק עצבי שנגרם על ידי כוחות מרתקים מוגזמים ואת הניזק הנלווה אל הרקמות הסובבות. בהתאם לחומרת הניזק, סיבוכים שונים הנעים בין אלה חמורים פחות, כגון כאב, אל אלה חמורים, כגון קרישי דם ואף נכות צמיתה, עלולים לפרוץ. בהתחשב בצורך למנוע ניזק נלווה של רקמות עצבות במהלך מניפולציה כירורגית, הממצאים הראשוניים שלנו עולים כי התקני תפסן פנאומטי רובוטית רכים אלה הם מועמדים פוטנציאליים מתאימיםהמשלימה מלקחיים נוכחיים במהלך מניפולצית רקמה עדינה על ידי מתן היכולת להשיג אחיזה תואמת. אלסטומר מבוסס סיליקון המשמש בודה תפסן הרך יש מודול יאנג של 0.8 x 10 5 אבא, אשר ניתן להשוות לאל של שרירי אדם ובר-עיוות רכים ורקמות 13, 14. לכן, זה יקטין את הסיכונים של ניזק לרקמות לעומת כדי grippers נוקשה מקבילתה.
מכל השלבים מתוארים, את השלבים הקריטיים ביותר הם המיצוב של ערוצי פנאומטי בעיצוב העובש, החיסול של בועות האוויר שנלכדו לפני תהליך הריפוי, ואת האיטום של האוויר. ערוצי פנאומטי לא צריכים להיות ממוקמים קרובים מדי לקיר החיצוני של תפסן כדי למנוע המפעיל מן הפקיעה בלחצים נמוכים. כל בועות אוויר שנלכדו צריכות לחסל לפני הריפוי כמו זו תסיר נקודות כשל פוטנציאליות ובכך בסופו של דבר לשיפור הביצועים של תפסן.מבנה תפסן צריך להיות מלוכד היטב שכבת האיטום ליצור תא סגור כי הוא מסוגל לאחסן אוויר ללא דליפה.
טכניקות ייצור שונים גם הוצעו על מנת לבנות-ומפעילים מיקרו רך עבור מרתק יישומים 15-17. למשל, Lu & קים 15 הציעה microhand עשה עם שלושה שלבים של תהליך ליתוגרפיה רך. במקרה זה, microhand הוא מסוגל לתפעל אובייקטים יחסית קטנים אבל גליל חנקן דחוס חיצוני נדרש עבור actuation שלה. לאחרונה, Rateni et al. 16 פתח תפסן רובוטית כבל מונחה רך שבו האצבעות הרכות נעשו על ידי יציקת סיליקון בתוך תבניות מודפסות 3D. במקום שיש ערוצי פנאומטי באמצע תפסן זרוע, תפסן רובוטית הונע על ידי סרוו עם הכבלים מחוברים האצבע. ברגר ואח '. 17 הציע microgrippers רך מתקפל self made עם pr photolithography רציפיםocess. מתאר תהליך ובקרת ייצור המעורב יקר ומורכב. מצד השני, תהליך הייצור המוצע הוא עלות פשוטה, נמוכה והוא יכול להסתיים בתוך 4 שעות, הזמן הכולל עבור הדפסת 3D של התבניות וכלי טיפול. תפסן הרך בעל מאפיינים מרתקים כגון עלות מרכיב נמוכה, עמידים במים שאינם מאכלת. המורכבות המינימאליות המעורבות שליטת תפסן הרך מותר לו לשמש ביישומים מרתקים שונים לאמץ בקלות על ידי המשתמשים.
תהליך הייצור המתוארים במחקר זה בעיקר מעורב טכנולוגיית הדפסת 3-D ו- בגישה מבוססת מוט ליצור ערוצי פנאומטי. הוא מציג את האפשרות של יצירת עיצובי תפסן להתאמה אישית על ידי שינוי עיצוב העובש. תפסן פנאומטי רובוטית רך וו נעשה באמצעות עובש שונה עם מרכיב וו מרתק ומרכיב קאמרי (איור 8). זה הוכיח כי ca עיצוב תפסןn להיות משונה מפוברק בקלות ובעלות נמוכה. השימוש של המוט כדי ליצור ערוצי פנאומטי מותר ייצור של grippers רובוטית רך מיניאטורי. זה הוכיח כי גישה זו מתאימה ליצירת רובוטים הרכים miniaturize על מנת למנוע חסימה של ערוצי פנאומטי הזעירים במהלך תהליך האיטום שבוצע תהליך ייצור קונבנציונלי של רובוטים רכים. עם זאת, בחלק מהמקרים כאשר עובש חדש משמש ראשון ליציקת אלסטומר, המשטח החיצוני של תפסן נרפא יכול להיות דביק. במקרה כזה, תפסן צריך להיות ממוקם בתוך התנור עבור ריפוי נוסף עד הדביקות של פני השטח הוא נעלם. בנוסף, יש להקפיד על מנת להבטיח כי האיטום הוא הבאר לבין דופן התא התחתונה אין בועות. ראוי לציין, כי באזור שבו יש שני חורים עוברים דרך הקיר, אשר מיועד החדרת מוטות התיל, יש הסתברות גבוהה יותר של המכיל בועות אוויר שנלכדו לעומת רג האחריונים. שכבה נוספת של חומר אלסטומרי ניתן ליישם בעזרת מברשת על שולי שכבת האיטום והקיר תחתון כדי לשפר את חוסנו של תפסן.
התכונה הייחודית של הטכניקה המוצעת היא לשלב את הרעיון של הדפסת רכיב קאמרי על התבנית כדי ליצור תא מלא אוויר עבור actuation. המרכיב הקאמרי התקני תפסן רובוטית הרכים מאפשר כוח דחיסת האחיזה להיות נשלט באמצעות הדחיסה של החדר. לעומת מקורות אוויר חיצוניים, כגון משאבות ניידות, אשר אומצו באופן נרחב לשימוש עבור הרובוטים הרכים, במצב ידני שליטה הוא בר השגה עם הנוכחות של המרכיב בתא. זה חשוב במיוחד עבור מניפולציה כירורגית שבה המנתחים מעדיפים להיות מסוגל ממש להרגיש ולשלוט כמות הכוח שהם מגישים בקשה. היתרון של הרכיב הקאמרי הוא שזה גם מותר במצב האוטומטי שליטה על ידי שילוב ליניארימפעיל לתוך כלי הטיפול. לכן, הן במצב ידני ואוטומטי שליטה ניתן לעשות עם רכיב תא מחובר ערוצי פנאומטיות actuation. grippers רובוטית רך פריק בעלות נמוכה אלה נועדו לשימוש חד פעמי, כלומר אין צורך מחדש עיקור לשימוש חוזר. כלי והטיפול הם sterilizable ואת grippers רובוטית הרכה ניתן להוסיף בקלות לפני המניפולציה כירורגית מתבצעת. העיצובים של מכשירי תפסן כירורגי פנאומטי רכים אלה נוספים לאפשר-שינוי היתר של עיצובים שונים של מכשירים בתוך כלי טיפול יחידים כדי להתאים לדרישות מרתקות שונות.
עם זאת, הטכניקה הזו צריכה לראות בעוד כמה מגבלות. ראשית, שני הליכים נפרדים נדרשים לפברק את הרכיבים המרתקים רכיבים בתא לחבר את ערוצי פנאומטי ורכיב קאמרי ביחד, תהליך איטום נדרש עבור החדר. למרות שזה מסיר את neאד של מקורות אוויר חיצוניים, מאריך את הזמן ב המטיל את grippers רובוטית הרך. שנית, הלחץ המקסימאלי שניתן להחיל את ערוצי פנאומטי היה מוגבל על ידי המאפיינים של אלסטומר. גדולה יותר כוחות דחיסה ניתן להפיק באמצעות אלסטומר נוקשה או חיזוק אלסטומר עם סיבים כדי למנוע קרע של ערוצי פנאומטי. לדוגמא, סיבי משי, אשר נמצא בשימוש נרחב כחומר תפר כירורגי או פיגומים בשל biocompatibility שלהם תכונות מכאניות בולטות, ניתן להשתמש כדי לחזק את grippers הרך 18. תלוי ביישומים השונים, אלסטומר עם קשיחות גבוהה היא היה צריכה להבטיח את האיזון בין אחיזה התואמת ומאובטחת. בנוסף, מרתק תואם ומשטח מגע חלק של תפסן המוצע עלולים לגרום חלקה להתרחש. עם זאת, קשר להתאמה, אחד המאפיינים המפתח הפנימי של גומי סיליקון, מותר תפסן כדי להתאים את קווי המתאר פני השטח של האובייקט. אָנוּהסתגלות מאמין כי זה בעקיפין משפרת את היציבות של מרתק. שינוי על משטחי מגע האחיזה, כמו למשל שילוב עיצוב שיניים לתוך משטח המגע, יכול לסייע במתן אוחז יציב. לבסוף, לעומת grippers הרך אחר עם שלוש או יותר נשק 15-17, הופעות האחיזה של תפסן רובוטית דו-הלסת המוצעת מבחינת היציבות פחות נוחות.
טכניקה זו היא מדרגית, לפיה grippers רובוטית רך שונים, החל בקנה מידה קטן, כגון grippers כירורגית, בקנה מידה גדול, כגון grippers יד קווי הייצור התעשייתי, יכול להיות מפוברק. בפרט, יכול להיות מותאם אישית מבוסס grippers השונה על העיצוב של התבניות. למשל, תפסן עצב היברידי משלב המרכיב המרתק הרך מפשק וו עצב נוקשה ניתן מוצע לשימוש מניפולציה כירורגית. המרכיב המרתק הרך הוא עטוף בתוך מעטפת מלבנית והוא יהיה לנפח ליד ar טיפea להחזקת העצב על מפשק וו כאשר הלחץ מוחל לערוץ. המתמודד מגבלה נפוצה לשימוש תפסן לסתות כאשר הלסתות נוטות לדחוף חפץ החוצה כשהם סוגרים, אשר מציב קושי מסוים אחיזה. זה יהיה שימושי כדי לגרוף את העצבים ואז לספק אחיזה תואמת, ואילו grippers הלסתות הרך יכול אחיזה רק להרים חפצים שאינם כבר במגע עם משטח כלשהו.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
החוקרים אין לי מה לחשוף.
Acknowledgments
המחקר נתמך על ידי R-397-000-204-133 (האוניברסיטה הלאומית של סינגפור יאנג חוקר הפרס).
Materials
| Name | Company | Catalog Number | Comments |
| Weighing Scale | Severin | KW3667 | (Step: Preparation of elastomers) |
| Ecoflex Supersoft 0030 Elastomer | Smooth-On | EF0030 | (Step: Preparation of elastomers) |
| Planetary Centrifugal Mixer and Containers | THINKY USA Inc. | ARE-310 | (Step: Preparation of elastomers) |
| Solidworks CAD | Dassault Systèmes | Solidworks Research Subscription | (Step: Soft single/double-actuatable arm pneumatic grippers) |
| Objet 3D Printer | Stratasys | 260 Connex2 | (Step: Soft single/double-actuatable arm pneumatic grippers) |
| Titanium Wire Rods | Titan Engineering | N/A | (Step: Soft single/double-actuatable arm pneumatic grippers) |
| Natural Convection Oven with Timer | Thermo Fisher Scientific | BIN#ED53 | (Step: Soft single/double-actuatable arm pneumatic grippers) |
| Linear Actuator | Firgelli Technologies | L12 | (Step: Insertion of soft robotic pneumatic gripper device into handling tool) |
| Jumper Wire | sgbotic | CAB-01146 | (Step: Evaluations and grip compressive test) |
| Force Sensing Resistor | Interlink Electronics | FSR402 | (Step: Evaluations and grip compressive test) |
References
- Tolley, M. T., et al. A resilient, untethered soft robot. Soft Robotics. 1 (3), 213-223 (2014).
- Low, J. H., Delgado-Martinez, I., Yeow, C. H. Customizable soft pneumatic chamber-gripper devices for delicate surgical manipulation. ASME J Med Devices. 8 (4), 044504 (2014).
- Rus, D., Tolley, M. T. Design, fabrication and control of soft robots. Nature. 521, 467-475 (2015).
- Lee, W. J., Chan, C. P., Wang, B. Y. Recent advances in laparoscopic surgery. Asian J Endosc Surg. 6 (1), 1-8 (2013).
- Schoeller, T., Huemer, G. M., Shafighi, M., Gurunluoqlu, R., Wechselberger, G., Piza-Katzer, H. Microsurgical repair of the sural nerve after nerve biopsy to avoid associated sensory morbidity: a preliminary report. Neurosurgery. 54 (4), 897-900 (2004).
- Bamberg, R., Jones, B., Murray, L., Sagstetter, A. Laparoscopic grasper for minimally invasive laparoscopic surgery. , http://homepages.cae.wisc.edu/ ~bme200/grasping_instrument_f06/reports/midsemester_rd.pdf (2006).
- Ducic, I., Hill, L., Maher, P., Al-Attar, A. Perioperative complications in patients undergoing peripheral nerve surgery. Ann Plast Surg. 66 (1), 69-72 (2011).
- Shepherd, R. F., et al. Multigait soft robot. PNAS. 108 (51), 20400-20403 (2011).
- Objet 260 Connex User Guide. , http://www.objet.com (2016).
- Force Sensing Resistor Integration Guide & Evaluation Parts Catalog with Suggested Electrical Interfaces. , https://www.sparkfun.com/datasheets/Sensors/Pressure/fsrguide.pdf (2002).
- Dagum, A. B. Peripheral nerve regeneration, repair, and grafting. J Hand Ther. 11 (2), 111-117 (1998).
- Felippe, M. M., Telles, F. L., Soares, A. C. L., Felippe, F. M. Anastomosis between median nerve and ulnar nerve in the forearm. J Morphol Sci. 29 (1), 23-26 (2012).
- Rus, D., Tolley, M. D. Design, fabrication and control of soft robots. Nature. 521, 467-475 (2015).
- Elango, N., Faudzi, A. A. M. A review article: investigations on soft materials for soft robot manipulations. Int J Adv Manuf Technol. 80 (5), 1027-1037 (2015).
- Lu, Y. W., Kim, C. J. Microhand for biological applications. Appl Phys Lett. 89, 1641011-1641013 (2006).
- Rateni, G., et al. Design and development of a soft robotic gripper for manipulation in minimally invasive surgery: a proof of concept. Meccanica. 50 (11), 2855-2863 (2015).
- Breger, J. C., et al. Self-folding thermo-magnetically responsive soft microgrippers. ACS Appl Mater Inter. 7 (5), 3398-3405 (2015).
- Zafar, M. S., Al-Samadani, K. H. Potential use of natural silk for bio-dental applications. J Taibah Univ Med Sci. 9 (3), 171-177 (2014).
