

Introduction
وأثارت الروبوتات الناعمة مصلحة البحوث كبيرة داخل المجتمع الروبوتات والتي تم استخدامها في مهام وظيفية مختلفة مثل الحركة الموجية في بيئات غير منظم 1 و 2 التي تجتاح. وهي تتألف أساسا من المواد المرنة الناعمة والتي تسيطر عليها تقنيات يشتغل مختلفة من خلال استخدام مواد مختلفة مثل البوليمر electroactive (EAP)، وشكل سبائك الذاكرة (SMA)، أو ضغط السائل 3. وظيفة EAPs على أساس الجهد التفاضلية التي يدفع القوات كهرباء لإنتاج سلالات نشطة، وبالتالي يولد يشتغل. ينتشر تأثير الذاكرة شكل غريب من SMAS لتوليد يشتغل المطلوب على أساس الجيل قوة خلال التحولات المرحلة على التغير في درجة الحرارة. وأخيرا، مضغوط تقنية السائل يشتغل تسهل استراتيجية تصميم بسيطة للحث على الفرق تصلب في المحركات الناعمة، مثل أن المناطق الأكثر المتوافقة سوف تنتفخعلى الضغط. تم تصميم الروبوتات الناعمة لتوسيع تطبيقات الروبوتات الصلبة التقليدية، خاصة في التطبيقات التي تشترك فيها الكائنات الدقيقة. بشكل خاص، في هذه الورقة، ونحن تقديم النهج الفريد في تطوير القابضون الروبوتية الناعمة للتلاعب الجراحية الدقيقة.
تجتاح الجراحي هو جانب هام تشارك في العديد من العمليات الجراحية مثل الكبد، أمراض النساء، المسالك البولية، والعصبية جراحات إصلاح 4 و 5. وعادة ما يتم تنفيذه من قبل جامدة، والأدوات التي تجتاح الأنسجة الصلب مثل ملقط والممسك بالمنظار لغرض تسهيل الملاحظة، الختان، وإجراءات مفاغرة، وما إلى ذلك، مطلوب الحذر الشديد كما يتم إجراء الأدوات التي تجتاح التقليدية من المعادن التي قد تسبب مجالات تركيز الضغط العالي في الأنسجة اللينة في نقاط الاتصال 6. اعتمادا على شدة الأضرار الأنسجة، ومضاعفات مختلفة مثل الألم، وندبة المرضية الأنسجة وormation الوقود النووي، وحتى العجز الدائم، قد يؤدي. أفادت دراسة سابقة أن نسبة المضاعفات في جراحة الأعصاب الطرفية كان 3٪ 7. ولذلك، فإن مفهوم تجتاح الناعمة التي يمكن أن توفر قبضة المتوافقة آمنة يمكن أن يكون مرشح واعد للتلاعب الجراحية الدقيقة.
هنا، نقدم مجموعة من 3D الطباعة وتعديل تقنيات الطباعة الحجرية الناعمة، التي اعتمدت النهج القائم على قضيب، لافتعال تخصيص الناعمة القابضون الهوائية الروبوتية. تقنية تصنيع التقليدية من الروبوتات الناعمة على أساس يشتغل السائل المضغوط يتطلب القالب مع القنوات الهوائية المطبوعة على ذلك وعملية ختم لاغلاق القنوات 8. ومع ذلك، فإنه ليس من الممكن للروبوتات الناعمة المنمنمة التي تحتاج إلى قنوات هوائية صغيرة حيث انسداد قنوات يمكن أن يحدث بسهولة في عملية الختم. تقنية التقليدية تتطلب ختم القنوات الهوائية مما يتعين القيام به من قبل الرابطة طبقة ختم المغلفة إليها. وبالتالي، فإن لاYER من المواد المرنة التي تعمل في البداية على شكل طبقة الرابطة قد تمتد إلى قنوات صغيرة وتسد تلك القنوات. كما أنه ليس من الممكن وضع القنوات الهوائية في وسط الهيكل والاتصال عنصرا الغرفة باستخدام التقنيات التقليدية. يسمح النهج المقترح إنشاء القنوات الهوائية المنمنمة متصلة الغرفة باستخدام قضبان مليئة بالهواء ولا يحتاج ختم قنوات صغيرة. وبالإضافة إلى ذلك، غرفة متصلة القنوات الهوائية بمثابة مصدر الهواء التي لا تحتاج إلى مصادر الهواء الخارجية ليشتغل السائل المضغوط. فإنه يسمح لكل دليل وسائط التحكم الروبوتية من خلال تسهيل ضغط الغرفة لتحفيز المكون تجتاح، مما يوفر للمستخدمين خيار التحكم في كمية القوة التي كانت تطبق من خلال القابض. هذا النهج هو غاية للتخصيص، ويمكن استخدامها لصنع أنواع مختلفة من التصاميم القابض لينة مثل القابضون مع واحد أو موltiple الأسلحة actuatable.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
ملاحظة: ملفقة جميع القابضون الهوائية لينة من قبل الصب خليط المرنة القائمة على السيليكون في قوالب مطبوعة 3D حسب الطلب، والتي أعقبت عملية تلفيق تضم ثلاث خطوات: صب المكونات القابض الذراع مع القنوات الهوائية جزءا لا يتجزأ، صب مكون غرفة متصلة القنوات الهوائية وختم المكون غرفة مملوءة بالهواء.
1. إعداد اللدائن
- وضع وعاء لخلط على نطاق وزنها والفارغة ذلك. صب أجزاء ألف وباء من المطاط الصناعي من مادة السيليكون في حاوية مع نسبة 1: 1 الوزن.
- تغطية الحاويات وقياس الوزن الكلي.
- وضع الحاويات والمواد في خلاط الطرد المركزي. ضبط توازن الوزن في الخلاط إلى الوزن يقاس في الخطوة 1.2.
- تعيين وسائط الخلط ودي-التهوية إلى 2000 دورة في الدقيقة و 2200 دورة في الدقيقة على التوالي لمدة 30 ثانية. خلط مكونات المطاط الصناعي بدقة لتحقيق علاج موحد.
ملاحظة: سوف هندسة القالب تختلف تبعا لمتطلبات محددة لمختلف التطبيقات. توضح الخطوات التالية الخطوات الرئيسية العامة في برنامج CAD المطلوبة لإنشاء عنصر الغرفة والقابض من العفن.
- تصميم القوالب وختم العفن باستخدام تصميم (CAD) البرمجيات بمساعدة الكمبيوتر. انظر الشكل 1 للهندسة ومحددة أبعاد القوالب المستخدمة في هذه المخطوطة.
- تصميم مربع الحدود الخارجية
- انقر بزر الماوس الأيمن على متن الطائرة أعلى وانقر على "عادي إلى" الزر لتطبيع إلى الطائرة العليا.
- انقر على "رسم" في أعلى الزاوية اليسرى لفتح "رسم" نافذة. ثم، انقر على زر "رسم" في أعلى الزاوية اليسرى من شريط الأدوات رسم قاعدة مستطيلة من عنصر الغرفة.
- انقر على ميزة "سمارت البعد"، والذي يقع بجانب زر "رسم"، لتحديد كوروناأبعاد حفر. تأكد من أن رسم يعرف تماما (أي، كل رسم خطوط تصبح سوداء) والخروج من رسم عند الانتهاء.
- انقر على نافذة "الميزات". ثم، انقر على "بوس مقذوف / قاعدة" ميزة لقذف ملامح المحدد في Y-الاتجاه.
- انقر على السطح العلوي للنموذج تختر مسبقا الطائرة رسم. رسم مستطيل وتحديد الأبعاد كما هو موضح في 2.1.1.2 و2.1.1.3.
- انقر على نافذة "الميزات". ثم، انقر على ميزة "قطع مقذوف" لقذف قطع تجويف لصب اللدائن (الشكل 2A). تأكد من أن سمك الجدار هو 2.5 ملم.
- تصميم الغرفة الداخلية
- انقر بزر الماوس الأيمن على سطح على Y-اتجاه منطقة الافتتاح. ثم، انقر على "عادي" لتطبيع إلى ذلك السطح.
- بعد ذلك، انقر على نافذة "رسم" لرسم مستطيل لمكون الغرفة كما هو موضح في الخطوات 2.1.1.2 و2.1.1.3.
- انقر على نافذة "الميزات". ثم، انقر على "بوس مقذوف / قاعدة" ميزة لقذف المكون غرفة في Y-الاتجاه (الشكل 2B).
ملاحظة: عمق القطع في خطوة 2.1.1.6 هو 2.5 ملم أكبر من هذه القاعدة مقذوف.
- تصميم المكون القابض
- انقر على سطح هذا النموذج في السلبي X-الاتجاه إلى تختر مسبقا الطائرة رسم لمكون القابض. إنشاء مستطيل في إطار "رسم" كما هو موضح في الخطوات 2.1.1.2 و2.1.1.3.
- انقر على نافذة "الميزات". ثم، انقر على "بوس مقذوف / قاعدة" ميزة لقذف كفاف مختارة في السلبية X-الاتجاه.
- انقر على السطح العلوي للعنصر القابض لتختر مسبقا الطائرة رسم. إنشاء شكل من القابض في "رسم" نافذة (الشكل 2C) والخروج من رسم عند تعريف أبعاد تماما كما هو موضح في الخطوات 2.1.1.2 لد 2.1.1.3.
- انقر على نافذة "الميزات". ثم، انقر على "قص المقذوف" لخفض تجويف لصب اللدائن في مكون القابض. تأكد من أن سمك الجدار هو 2.5 ملم.
- تصميم اتصال بين الغرفة والقابض
- إنشاء مستطيل في إطار "رسم" على السطح العلوي للقطعة الغرفة كما هو موضح في 2.1.1.2 و2.1.1.3.
- انقر على نافذة "الميزات". ثم، انقر على "قص المقذوف" لإنشاء اتصال بين مكونات الغرفة والقابض (الشكل 2D).
- تصميم القنوات الهوائية
- إنشاء 1.5 ملم دوائر قطرها على سطح قطعة غرفة في إيجابي X-الاتجاه كما هو موضح في الخطوات 2.1.1.2 و2.1.1.3.
- انقر على نافذة "الميزات". ثم، انقر على "قص المقذوف" لخلق قنوات للقضبان الأسلاك الإدراج (الشكل 2E). ضمان الحوللا يتم قطع وفاق من خلال عنصر القابض.
- تصميم مربع الحدود الخارجية
- في ملف منفصل CAD، رسم قالب الختم مع تجويف من الطول والعرض التي هي 1 ملم أكبر من الأبعاد الخارجية للمكون غرفة القابض. ملاحظة: سمك الجدار هو 2.5 ملم.
- انقر على نافذة "رسم" لإنشاء مستطيل على متن الطائرة الأولى كما الخطوات الموضحة 2.1.1.2 و2.1.1.3.
- انقر على نافذة "الميزات". ثم، انقر على "بوس مقذوف / قاعدة" ميزة لقذف ملامح المحدد في Y-الاتجاه.
- انقر على الوجه العلوي من نموذج لتختر مسبقا الطائرة رسم. رسم مستطيل وتحديد الأبعاد كما هو موضح في الخطوات 2.1.1.2 و2.1.1.3).
- انقر على نافذة "الميزات". ثم، انقر على ميزة "قطع مقذوف" لقذف قطع تجويف لصب اللدائن. تأكد من أن سمك الجدار هو 2.5 ملم.
- حفظ كل قطعة القالب كملف. STL للطباعة 3D. تحميل الملف. STL في الطابعة 3D مع قرار من 30 ميكرون وطباعة قالب قطع 9.
- إزالة أي مواد الدعم على العفن القطع وغسل قطع قالب بالماء.
3. لينة واحدة / مزدوجة-actuatable القابضون ذراع تعمل بالهواء المضغوط
- صب المكونات القابض الذراع مع القنوات الهوائية جزءا لا يتجزأ من
- إدراج اثنين من غرفة لبنات مطبوعة 3D على الجانب الأيسر والأيمن من العنصر غرفة (الشكل 3A) من أجل توليد غرفة مغلقة مع القنوات الهوائية المتصلة به.
- إدراج اثنين من قضبان 1.5 مم القطر التيتانيوم الأسلاك من خلال الغرفة، الحفاظ على مسافة 2 مم من النصائح القابض لإنشاء القنوات الهوائية (الشكل 3A). ملاحظة: استخدم أحد الأسلاك لالقابض واحد actuatable الذراع.
- صب خليط من اللدائن المرنة في القالب لملء بالكامل المكون القابض.
- ضمان عدم وجود فقاعات الهواء مرئية الحاضر.
- PLACالبريد القالب في الفرن لعلاج عند 60 درجة مئوية لمدة 10 دقيقة. بمجرد أن يتم الشفاء المطاط الصناعي، وإزالة القالب من الفرن.
- مكون غرفة الصب متصلا القنوات الهوائية
- سحب قضبان الأسلاك وتزرع مجلسين الخروج من القالب.
- وضع المطبوعة 3D-القابض كتلة على رأس المكون القابض من أجل إنشاء غرفة (الشكل 3B). إدراج قضبان الأسلاك لمنع الثقوب في جدار القالب.
- صب خليط من اللدائن المرنة في القالب لملء الجزء المتبقي من عنصر الغرفة والتأكد من عدم وجود فقاعات الهواء مرئية المحاصرين في القالب.
- علاج الجزء عند درجة حرارة 60 درجة مئوية لمدة 10 دقيقة. إزالة القالب من الفرن مرة واحدة يتم الشفاء المطاط الصناعي.
- إزالة القابض كتلة وdemold القابض الشفاء التام مع هيكل الغرفة.
- ختم المكون غرفة مملوءة بالهواء
- صب خليط من اللدائن المرنة في قالب الختم وعلاجه عند 60 درجة مئوية لمدة 10 دقيقة.
- فرشاة طبقة من المواد المرنة على الشفاء 2.5 ملم ختم طبقة. ضع القابض علاجه مع هيكل غرفة في أعلى طبقة ختم المغلفة والسندات قطعتين معا (الشكل 3C).
- وفي وقت لاحق، وعلاج هيكل كامل تماما عند 60 درجة مئوية لمدة 15 دقيقة.
- Demold لينة جهاز القابض الروبوتية الشفاء التام.
4. الإدراج من جهاز لينة الروبوتية هوائي القابض إلى أداة المناولة
- تصميم التعامل مع الأدوات كما هو موضح في الملف التكميلي 1 باستخدام برامج CAD وحفظه في ملف. STL. انظر الشكلين 4 و 5 لأبعاد الأدوات.
- تحميل الملف. STL في الطابعة 3D وطباعة قالب قطع 9.
ملاحظة: يمكن الانتهاء من جميع الخطوات طباعة لغسل التعامل مع أداة التحكم، وكأب مستطيلة، ومكبس متحرك (الشكل 4) في غضون 3 ساعة 48 دقيقة. العلاقات العامةالوقت inting لافتعال السيطرة الآلية أداة وغطاء مستطيل التعامل مع (الشكل 5) هو 1 ساعة 56 دقيقة. رؤية الملف التكميلي 2 للحصول على تعليمات تشغيل طابعة 3D. - تقشر أي مواد الدعم على الأدوات بعد الانتهاء من الطباعة. ثم، وغسل الأدوات بالماء.
- إدراج القابض في اليدوي أداة التحكم (الشكل 4A) وتغطية المنطقة الافتتاح مع قبعة مستطيلة المنقولة (الشكل 4B).
- إدراج مكبس متحرك (الشكل 4C) لتسهيل ضغط الغرفة.
- إدراج القابض والمحرك الخطي في الروبوتية أداة معالجة التحكم (الشكل 5A). ملاحظة: المحرك الخطي محل مكبس متحرك في وضع التحكم اليدوي لضغط الغرفة.
- تغطية المنطقة الافتتاح مع قبعة مستطيلة المنقولة (الشكل 5B).
5. تقييم وقبضة اختبار الانضغاط
- تقييموظيفة القابض لينة عن طريق إجراء اختبارات تجتاح بسلك الطائر.
- وضع الأسلاك العبور على الطاولة.
- ضبط القابض بحيث يكون السلك بين اثنين من الأسلحة القابض.
- نقل مكبس متحرك لضغط الغرفة من أجل تحفيز الأسلحة القابض لعقد السلك.
ملاحظة: يتم استخدام أداة التحكم اليدوي التعامل مع فقط في المظاهرة التي تجتاح. - عقد ونقل الأسلاك إلى مربع تقع في 20 سم بعيدا عن موقع الأسلاك الأصلي.
- وضع معايرة المقاوم قوة الاستشعار بين فكي القابض. ضمان قبضة فكي القابض على منطقة الاستشعار عن بعد. ملاحظة: قطر المنطقة الاستشعار هي 14.7 ملم.
- ضغط الغرفة لتحفيز الأسلحة القابض على قبضة على المقاوم قوة الاستشعار عن بعد.
- قياس الحد الأقصى للقوات قبضة ضغطي أن ينة actuatable ذراع واحد ومزدوج actuatable الذراع القابضون الهوائية يمكن أن تولد كما هو موضح في 10.
ملاحظة: سيتم عرض القيم قراءات على جهاز كمبيوتر محمول. يتم قياس قوات قبضة ضغطي القصوى عند نقطة أقصى قدر من الضغط الذي القنوات الهوائية يمكن أن تصمد. - قطع فكي تجتاح المرنة الفردية من لينة انقر نقرا مزدوجا actuatable ذراع القابض الهوائية.
- إدراج ملقط نصائح في القنوات الهوائية من بين فكي تجتاح المرنة.
- وضع معايرة المقاوم قوة الاستشعار بين فكي ملقط.
- قياس القوى الضاغطة 10 التي تم إنشاؤها بواسطة ملقط وملقط المغلفة المطاط الصناعي خلال الجراحة العصبية محاكاة أجراها جراح الاعصاب.
ملاحظة: جراح الاعصاب ينطبق قوة مشابه لما كان يطبق عادة أثناء الجراحة الفعلية على المقاوم قوة الاستشعار عن بعد. - متوسط البيانات التي تم الحصول عليها من خمس تجارب في كل اختبار.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
وكانت أجهزة القابض الهوائية الروبوتية الناعمة القادرة على التقاط الأشياء ذات أبعاد تصل إلى 1.2 ملم وقطرها (الشكل 6). كانت أقصى قوة ضاغطة قبضة لدت قبل أحادية actuatable الذراع، ومزدوج actuatable الذراع أجهزة القابض الناعمة 0.27 ± 0.07 N و 0.79 ± 0.14 N على التوالي، بالمقارنة مع 1.71 ± 0.16 N و 2.61 ± 0.22 N القوات الضغط في جراحة المحاكاة بواسطة ملقط المغلفة المطاط الصناعي وبواسطة ملقط غير المصقول (الشكل 7). قد تختلف قوات قبضة اعتمادا على هندسة القابضون وحجم القنوات الهوائية. وخصائص المواد المطاط الصناعي في تحديد الضغط الأقصى أن القنوات الهوائية يمكن أن تصمد، والتي بدورها سوف تؤثر على القوات قبضة. التقنية المقترحة (الشكل 3) يدل على أن خلق منخفضة التكلفة القابض هوائي لينة في الوقت تلفيق سريع ممكن، لد تم تقييم وظائف هذه القابضون في هذه الدراسة. باستخدام تقنية صفها، تصنيع التصاميم القابض مختلفة لمختلف التطبيقات ويمكن تحقيق ذلك عن طريق تصميم قوالب المقابلة للصب المطاط الصناعي.
وأظهرت هذه النتائج أن تجتاح متوافقة، دون إدخال الإجهاد المفرط إلى كائن يجتاح، للتحقيق مع تقنية تصنيع المقترحة. القدرة على التكيف من الأسلحة القابض الناعمة يسمح الأسلحة إلى مطابقة للكفاف سطح الجسم. ومع ذلك، فمن الضروري التأكد من أن تجتاح آمن لا خطر عندما يتم التوصل إلى قبضة المتوافقة. قبضة آن معا الشركة ومتوافقة أمر ضروري لتجتاح التطبيقات وخصوصا في الجراحة. نتائج يمكن تحليلها عن طريق إجراء تجارب رائدة الماوس لتقييم أداء القابض لينة في عقد العصبية الماوس، ودراسة مدى الضرر الذي أدلى إلى العصب عندمايتم استخدام القابض لينة بالمقارنة عندما يتم استخدام ملقط.

الشكل 1. 2D CAD رسومات من القوالب المستخدمة في تصنيع الهيكل العلوي من أجهزة القابض هوائي الروبوتية الغازية المرنة: (أ) المزدوج actuatable الذراع، و (ب) مفرد actuatable الذراع (جميع أبعاد هي في ملم). سمك الجدار هو 2.5 ملم لجميع القوالب. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.

الشكل 2. إنشاء القالب في CAD. (A) قطع قذف تجويف لصب اللدائن. (ب) إنشاء مكون غرفة في مولد. (ج) إنشاء تجويف لصب اللدائن لمكون القابض. (D) قذف قطع اتصال بين الغرفة والمكون القابض. (E) قذف قطع اثنين من الثقوب لعقد قضبان الأسلاك إلى خلق قنوات تعمل بالهواء المضغوط. يرجى النقر هنا لمشاهدة نسخة أكبر من هذا الرقم.

الشكل 3. عملية تصنيع لينة انقر نقرا مزدوجا actuatable ذراع القابض هوائي. (A) مكان اثنين من لبنات غرفة وإدراج اثنين من قضبان الأسلاك إلى خلق قنوات الهوائية التي تتصل غرفة. صب المطاط الصناعي في القالب وعلاج تماما المكون تجتاح. (ب) إزالة قضبان الأسلاك وتزرع الغرفة ووضع القابض كتلة على رأس المكون تجتاح ليخلق البريد الغرفة. صب المطاط الصناعي في القالب لجعل عنصر الغرفة. (C) بوند هيكل القابض وطبقة 2.5 ملم معا لخلق غرفة مليئة بالهواء مختومة. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.

الشكل 4. الرسومات 2D CAD من التعامل مع الأدوات لوضع التحكم اليدوي لتسهيل ضغط غرفة (A) أداة المناولة، (B) غطاء مستطيل، و (C) مكبس المنقولة (جميع أبعاد هي في ملم وحجم هو 2: 3 ما لم يحدد). الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.
"1"> 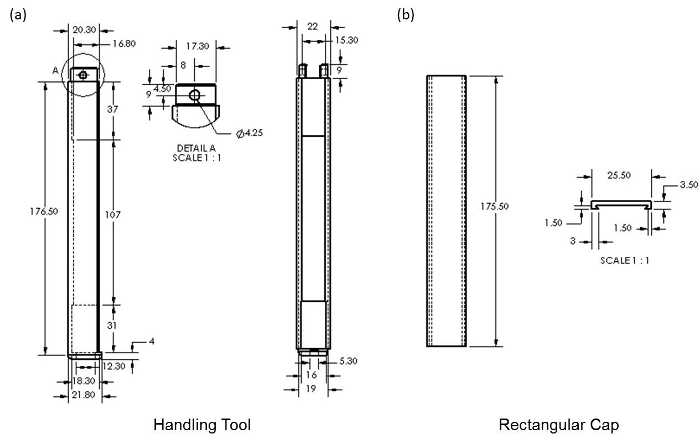
الرقم 5. 2D رسومات CAD من التعامل مع الأدوات لوضع التحكم الآلي لتسهيل ضغط غرفة (A) أداة المناولة، و (ب) الحد الأقصى مستطيلة (جميع أبعاد هي في ملم وحجم هو 2: 3 ما لم يحدد). يرجى النقر هنا لعرض نسخة أكبر من هذا الرقم.

الشكل 6. تقييم تجتاح اختبارات الأجهزة القابض المقترحة. صور من لينة الروبوتية (A) واحد actuatable الذراع، و (ب) المزدوج actuatable الذراع أجهزة القابض الهوائية قبل (يسار) وعلى (حق) التي تجتاح 1.2 ملم سلك القطر.
المحافظة على together.within الصفحات = "1"> 
الرقم 7. قبضة القوات الضغط المتولدة من قبل اثنين من الأجهزة الناعمة مختلفة الروبوتية الهوائية القابض، واثنين ملقط (المغلفة المطاط الصناعي وغير المصقول) في قبضة اختبار الضغط. وضعت قوة الاستشعار المقاوم بين فكي القابض / ملقط و القابض / ملقط فكي قبضته على منطقة الاستشعار في كل اختبار. تمثل أشرطة الخطأ الانحراف المعياري.

الرقم 8. 2D CAD رسومات من القوالب المستخدمة في تصنيع الهيكل العلوي من لينة ربط الروبوتية القابض الهوائية. يتم وضع القناة الهوائية أقرب إلى السطح السفلي للعنصر ربط تجتاح وسوف ينحني إلى أعلى على الضغط.
ether.within الصفحات = "1"> ملف التكميلي 1. تصميم أدوات المناولة. التفاصيل خطوة بخطوة على تصميم والتعامل مع الأدوات تشارك في برنامج CAD. يرجى النقر هنا لتحميل هذا الملف.
التكميلي ملف 2. دليل المستخدم الخاص بالطابعة 3D. ويوفر دليل المستخدم هذا تعليمات لتشغيل الطابعة. يرجى النقر هنا لتحميل هذا الملف.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
لقد أثبتنا بنجاح أن الناعمة الروبوتية الأجهزة القابض هوائي يسمح تجتاح متوافقة من الكائنات، التي تمارسها قوات الضغط أقل من ذلك بكثير على الكائن يجتاح من ملقط نصائح المغلفة المطاط الصناعي وملقط المبذولة. ملقط هي أداة أساسية للأعصاب التلاعب خلال إصلاح الأعصاب الطرفية جراحات 11 و 12. ومع ذلك، هيكل المعدني يتطلب الحذر الشديد في الاستخدام من الجراحين من أجل منع تلف الأعصاب الناجم عن القوات التي تجتاح المفرطة وأضرار عرضية إلى الأنسجة المحيطة بها. اعتمادا على شدة الضرر، ومختلف المضاعفات التي تتراوح بين تلك أقل حدة، مثل الألم، وإلى تلك حادة، مثل جلطات الدم، وحتى العجز الدائم، قد يؤدي. النظر في الحاجة إلى منع الضرر العرضي للأنسجة العصب خلال التلاعب الجراحية، وتشير النتائج الأولية لدينا أن هذه الأجهزة القابض الهوائية الروبوتية الناعمة هي المرشحين المناسبين المحتملين لاستكمال ملقط الحالية خلال التلاعب الأنسجة الحساسة من خلال توفير القدرة على تحقيق قبضة المتوافقة. المطاط الصناعي من مادة السيليكون المستخدمة في تصنيع القابض لينة لديها معامل يونج (أ) من 0.8 × 10 5 باسكال، وهو مشابه لتلك التي لينة عضلات الإنسان تشوه والأنسجة 13 و 14. لذلك، وسوف تقلل من مخاطر تلف الأنسجة مقارنة لالقابضون نظيرتها جامدة.
من وصفت كل الخطوات، الخطوات الأكثر أهمية هي تحديد المواقع من القنوات الهوائية في تصميم القالب، والقضاء على فقاعات الهواء المحبوس قبل عملية المعالجة، وختم غرفة الهواء. يجب عدم وضع القنوات الهوائية قريبة جدا من الجدار الخارجي للالقابض من أجل منع المحرك من تمزق في ضغوط منخفضة. وينبغي القضاء على أي فقاعات الهواء المحبوس قبل المعالجة حيث سيؤدي ذلك إلى إزالة نقاط الفشل المحتملة، وبالتالي تعزيز النهاية على أداء القابض.يجب أن يكون الرهينة هيكل القابض بشكل جيد لطبقة ختم لإنشاء غرفة المغلقة التي هي قادرة على تخزين الهواء دون تسرب.
كما تم اقتراح تقنيات تصنيع مختلفة لبناء الناعمة المحركات الصغيرة التي تجتاح تطبيقات 15-17. على سبيل المثال، لو وكيم 15 اقترح microhand المصنوع من ثلاث خطوات عملية الطباعة الحجرية الناعمة. في هذه الحالة، microhand غير قادرة على التعامل مع الأشياء الصغيرة نسبيا ولكن مطلوب اسطوانة النيتروجين المضغوط الخارجية ليشتغل به. وفي الآونة الأخيرة، Rateni وآخرون. 16 وضعت يحركها كبل القابض الروبوتية لينة حيث تم إجراء الأصابع الناعمة من قبل الصب السيليكون في قوالب طباعة 3D. بدلا من وجود قنوات الهوائية في منتصف الذراع القابض، دفعتها إلى القابض الروبوتية من قبل أجهزة السيارات مع الكابلات المتصلة الإصبع. Breger وآخرون. 17 اقترح قابلة للطي النفس microgrippers ينة مصنوعة من العلاقات العامة ضوئيه متتابعةocess. مخططات عملية التصنيع ومراقبة المعنية هي مكلفة ومعقدة. من ناحية أخرى، فإن عملية تصنيع المقترحة هي بسيطة ومنخفضة التكلفة، ويمكن أن تكتمل في غضون 4 ساعات، بما في ذلك الوقت لطباعة 3D من القوالب والتعامل مع الأدوات. القابض لينة تمتلك خصائص رائعة مثل تكلفة عنصر منخفضة، ومقاومة للماء وغير قابلة للتآكل. تعقيد الحد الأدنى تشارك في السيطرة على القابض لينة يسمح لاستخدامها في مختلف التطبيقات التي تجتاح واعتمادها بسهولة من قبل المستخدمين.
عملية تصنيع وصفها في هذه الدراسة تشارك أساسا تكنولوجيا الطباعة 3-D والنهج القائم على قضيب خلق قنوات الهوائية. فإنه يدل على إمكانية خلق تصاميم القابض للتخصيص من خلال تغيير تصميم القالب. وقدم لينة هوك الروبوتية القابض الهوائية باستخدام قالب تعديل مع عنصر ربط تجتاح وعنصر الغرفة (الشكل 8). فقد أظهر أن تصميم كاليفورنيا القابضن تعديلها بسهولة وملفقة بتكلفة منخفضة. استخدام قضيب لخلق قنوات الهوائية يسمح للتصنيع القابضون الروبوتية الناعمة المنمنمة. فإنه يدل على أن هذا النهج هو مناسبة لخلق تصغير الروبوتات الناعمة من أجل منع انسداد القنوات الهوائية الصغيرة أثناء عملية الختم نفذت في عملية التصنيع التقليدية من الروبوتات الناعمة. ومع ذلك، في بعض الحالات عندما يستخدم قالب جديد أولا لصب المطاط الصناعي، والسطح الخارجي للالقابض علاجه يمكن أن تصبح لزجة. إذا حدث هذا، ينبغي أن توضع القابض داخل الفرن لعلاج إضافي حتى يزول التصاق السطح. وبالإضافة إلى ذلك، يجب الحرص على التأكد من أن الختم هو جيد وجدار الغرفة السفلي لايوجد الفقاعات. لاحظ أن المنطقة حيث هناك نوعان من الثقوب التي تمر عبر الجدار، والتي تهدف لإدخال قضبان الأسلاك، لديها احتمال أكبر لاحتواء فقاعات الهواء المحبوس بالمقارنة مع ريج الآخرينالأيونات. طبقة إضافية من المواد المرنة يمكن تطبيقها باستخدام فرشاة على حواف طبقة الختم وجدار القاع من أجل تحسين متانة القابض.
ميزة فريدة من تقنية المقترحة لدمج فكرة طباعة مكون غرفة في قالب لإنشاء غرفة مليئة بالهواء ليشتغل. المكون غرفة في الأجهزة القابض الروبوتية الناعمة يسمح للقوة الضغط قبضة يتم التحكم فيها من خلال الضغط على المجلس. بالمقارنة مع مصادر الهواء الخارجي، مثل المضخات المحمولة، والتي اعتمدت على نطاق واسع لاستخدامها في الروبوتات الناعمة، الوضع اليدوي السيطرة يمكن تحقيقه مع وجود عنصر الغرفة. من المهم بصفة خاصة للتلاعب الجراحية حيث يفضلون الجراحين أن تكون قادرا على الشعور في الواقع والتحكم في كمية القوة التي كانت تطبق. الاستفادة من عنصر الغرفة هو أنه يسمح أيضا لوضع آلية لمراقبة من خلال دمج خطيالمحرك في التعامل مع الأدوات. لذلك، فإن كلا من الوضع اليدوي والتلقائي للتحكم يمكن القيام به مع المكون غرفة متصلة القنوات الهوائية للتشغيل. وتهدف هذه انفصال القابضون الروبوتية الغازية منخفضة التكلفة للاستخدام لمرة واحدة، وهو ما يعني أن ليست هناك حاجة لإعادة التعقيم للاستخدام المتكرر. والتعامل مع الأدوات وتعقيمها، ويمكن إدراجها في القابضون الروبوتية الغازية بسهولة قبل إجراء التلاعب الجراحية. تصاميم هذه الأجهزة القابض الجراحية الهوائية لينة تسمح كذلك بين تغيير تصاميم مختلفة جهاز في أداة معالجة واحدة لتناسب متطلبات تجتاح مختلفة.
ومع ذلك، تحتاج هذه التقنية إلى أن ينظر في عدد قليل من القيود. أولا، هناك حاجة إلى إجراءين منفصلين لصنع مكونات تجتاح ومكونات الغرفة لربط القنوات الهوائية والمكون غرفة معا، وكان الأمر يتطلب عملية ختم للغرفة. على الرغم من أنه يزيل شمال شرقإد من مصادر الهواء الخارجي، فإنه يزيد من الوقت في صب القابضون الروبوتية الغازية. ثانيا، الضغط الأقصى التي يمكن تطبيقها على القنوات الهوائية كان محدودا بسبب خصائص المطاط الصناعي و. القوات الضغط أكبر يمكن أن تتولد عن طريق استخدام المطاط الصناعي أكثر صلابة أو تعزيز المطاط الصناعي مع الألياف لمنع تمزق القنوات الهوائية. على سبيل المثال، ألياف الحرير، والتي تستخدم على نطاق واسع كمادة خياطة الجراحية أو السقالات بسبب توافق مع الحياة والخواص الميكانيكية المعلقة، ويمكن استخدامها لدعم القابضون الناعمة (18). يعتمد على التطبيقات المختلفة، وهناك حاجة المطاط الصناعي مع ارتفاع صلابة لضمان التوازن بين قبضة متوافقة وآمنة. بالإضافة إلى ذلك، قد يسبب الامساك ومتوافقة مع سطح الاتصال السلس للالقابض المقترحة انزلاق تحدث. ومع ذلك، سمح الاتصال قابلة للتكيف، واحدة من الخصائص الجوهرية الرئيسية من المطاط سيليكون، القابض على مطابقة للكفاف سطح الجسم. نحننعتقد أن هذه القدرة على التكيف بشكل غير مباشر يحسن استقرار تجتاح. تعديل على الأسطح الملامسة للقبضة، مثل دمج تصميم الأسنان إلى السطح الاتصال، ويمكن أن تساعد في توفير السيطرة مستقرة. وأخيرا، بالمقارنة مع القابضون الأخرى لينة مع ثلاثة أو أكثر من الأسلحة 15-17، وأداء قبضة القابض الروبوتية-جاويد المقترحين من حيث الاستقرار هي أقل مواتاة.
هذا الأسلوب هو تدرجية عالية، حيث المختلفة القابضون الروبوتية ميسرة تتراوح بين صغيرة الحجم، مثل القابضون الجراحية، إلى نطاق واسع، مثل القابضون اليد في خطوط التجميع الصناعي، ويمكن أن تكون ملفقة. على وجه الخصوص، يمكن تخصيص مختلف القابضون على أساس تصميم القوالب. على سبيل المثال، القابض العصبية الهجين الذي يجمع بين كل عنصر تجتاح ناعمة وجامدة ضام ربط الأعصاب يمكن اقتراح لاستخدامها في معالجة الجراحية. هو المغطى المكون تجتاح لينة في غلاف مستطيلة، وسوف تضخيم بالقرب من ع طرفعصام لعقد العصب على ضام هوك عندما يتم تطبيق الضغط على القناة. وهو يتناول وجود قيود مشترك لاستخدام فكي القابض كما تميل فكي لدفع الأجسام إلى الخارج عندما يغلق، الأمر الذي يشكل صعوبة معينة في استيعاب. وسيكون من المفيد لتلقط الأعصاب ومن ثم توفير قبضة المتوافقة، في حين أن القابضون فكي لينة يمكن أن قبضة فقط، والتقاط الأشياء التي لم تكن بالفعل على اتصال مع أي السطوح.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
الكتاب ليس لديهم ما يكشف.
Acknowledgments
وأيد هذا البحث من قبل R-397-000-204-133 (الجامعة الوطنية في سنغافورة جائزة الباحث الشاب).
Materials
| Name | Company | Catalog Number | Comments |
| Weighing Scale | Severin | KW3667 | (Step: Preparation of elastomers) |
| Ecoflex Supersoft 0030 Elastomer | Smooth-On | EF0030 | (Step: Preparation of elastomers) |
| Planetary Centrifugal Mixer and Containers | THINKY USA Inc. | ARE-310 | (Step: Preparation of elastomers) |
| Solidworks CAD | Dassault Systèmes | Solidworks Research Subscription | (Step: Soft single/double-actuatable arm pneumatic grippers) |
| Objet 3D Printer | Stratasys | 260 Connex2 | (Step: Soft single/double-actuatable arm pneumatic grippers) |
| Titanium Wire Rods | Titan Engineering | N/A | (Step: Soft single/double-actuatable arm pneumatic grippers) |
| Natural Convection Oven with Timer | Thermo Fisher Scientific | BIN#ED53 | (Step: Soft single/double-actuatable arm pneumatic grippers) |
| Linear Actuator | Firgelli Technologies | L12 | (Step: Insertion of soft robotic pneumatic gripper device into handling tool) |
| Jumper Wire | sgbotic | CAB-01146 | (Step: Evaluations and grip compressive test) |
| Force Sensing Resistor | Interlink Electronics | FSR402 | (Step: Evaluations and grip compressive test) |
References
- Tolley, M. T., et al. A resilient, untethered soft robot. Soft Robotics. 1 (3), 213-223 (2014).
- Low, J. H., Delgado-Martinez, I., Yeow, C. H. Customizable soft pneumatic chamber-gripper devices for delicate surgical manipulation. ASME J Med Devices. 8 (4), 044504 (2014).
- Rus, D., Tolley, M. T. Design, fabrication and control of soft robots. Nature. 521, 467-475 (2015).
- Lee, W. J., Chan, C. P., Wang, B. Y. Recent advances in laparoscopic surgery. Asian J Endosc Surg. 6 (1), 1-8 (2013).
- Schoeller, T., Huemer, G. M., Shafighi, M., Gurunluoqlu, R., Wechselberger, G., Piza-Katzer, H. Microsurgical repair of the sural nerve after nerve biopsy to avoid associated sensory morbidity: a preliminary report. Neurosurgery. 54 (4), 897-900 (2004).
- Bamberg, R., Jones, B., Murray, L., Sagstetter, A. Laparoscopic grasper for minimally invasive laparoscopic surgery. , http://homepages.cae.wisc.edu/ ~bme200/grasping_instrument_f06/reports/midsemester_rd.pdf (2006).
- Ducic, I., Hill, L., Maher, P., Al-Attar, A. Perioperative complications in patients undergoing peripheral nerve surgery. Ann Plast Surg. 66 (1), 69-72 (2011).
- Shepherd, R. F., et al. Multigait soft robot. PNAS. 108 (51), 20400-20403 (2011).
- Objet 260 Connex User Guide. , http://www.objet.com (2016).
- Force Sensing Resistor Integration Guide & Evaluation Parts Catalog with Suggested Electrical Interfaces. , https://www.sparkfun.com/datasheets/Sensors/Pressure/fsrguide.pdf (2002).
- Dagum, A. B. Peripheral nerve regeneration, repair, and grafting. J Hand Ther. 11 (2), 111-117 (1998).
- Felippe, M. M., Telles, F. L., Soares, A. C. L., Felippe, F. M. Anastomosis between median nerve and ulnar nerve in the forearm. J Morphol Sci. 29 (1), 23-26 (2012).
- Rus, D., Tolley, M. D. Design, fabrication and control of soft robots. Nature. 521, 467-475 (2015).
- Elango, N., Faudzi, A. A. M. A review article: investigations on soft materials for soft robot manipulations. Int J Adv Manuf Technol. 80 (5), 1027-1037 (2015).
- Lu, Y. W., Kim, C. J. Microhand for biological applications. Appl Phys Lett. 89, 1641011-1641013 (2006).
- Rateni, G., et al. Design and development of a soft robotic gripper for manipulation in minimally invasive surgery: a proof of concept. Meccanica. 50 (11), 2855-2863 (2015).
- Breger, J. C., et al. Self-folding thermo-magnetically responsive soft microgrippers. ACS Appl Mater Inter. 7 (5), 3398-3405 (2015).
- Zafar, M. S., Al-Samadani, K. H. Potential use of natural silk for bio-dental applications. J Taibah Univ Med Sci. 9 (3), 171-177 (2014).
