

Summary
Wir beschreiben eine neue Methode für das zählen der Fische, und relative Häufigkeit (MaxN) und Fisch-Dichte mit rotierenden Stereo-Video-Kamera-Systeme zu schätzen. Wir demonstrieren auch Abstand von der Kamera (Z-Abstand) zu verwenden, um artspezifische Nachweisbarkeit zu schätzen.
Abstract
Die Verwendung von Video-Kamerasysteme in ökologischen Studien Fische weiterhin als eine tragfähige, nicht extraktiven Methode der Messung Fische Längen und Schätzung Fisch Fülle Fuß fassen. Wir entwickelt und implementiert ein rotierendes Stereo-Video-Kamera-Werkzeug, das eine volle 360 Grad der Probenahme, abdeckt, maximiert die Probenahme Aufwand im Vergleich zu stationären Kamera-Tools. Eine Vielzahl von Studien haben detaillierte die Fähigkeit der statischen, Stereo-Kamera Systeme sehr genau und präzise Messungen von Fischen; im Vordergrund standen die Entwicklung methodischer Ansätze, Fisch-Dichte mit rotierenden Kamera-Systeme zu quantifizieren. Der erste Ansatz war es, eine Änderung der Metrik entwickeln MaxN, die in der Regel eine konservative Zählung der Mindestanzahl von Fisch auf einer Umfrage bei bestimmten Kamera beobachtet. Wir definieren MaxN um die maximale Anzahl der Fische in einer bestimmten Drehung des Kamerasystems beobachtet werden. Bei Vorsichtsmaßnahmen ergriffen werden, um Doppelzählungen zu vermeiden, kann diese Methode für MaxN wahre Fülle genauer als die von einer festen Kamera erhalten widerspiegeln. Zweitens, weil Stereo-Video Fische im dreidimensionalen Raum zugeordnet werden können, sind genaue Schätzungen über die Entfernung von der Kamera für jeden Fisch erhältlich. Mit 95 %-Perzentil der beobachteten Entfernung von Kamera um artspezifische Gebiete Befragten zu errichten, berücksichtigt Unterschiede in der Nachweisbarkeit unter Arten unter Vermeidung verdünnen Dichte Schätzungen mithilfe den maximalen Abstand war eine Art beobachtet. Buchhaltung für diesen Bereich der Nachweisbarkeit ist wichtig, genau zu schätzen, Fisch-Häufigkeiten. Diese Methode erleichtert die Integration von rotierenden Werkzeugen Stereo-Video in angewandter Wissenschaft und Verwaltung zusammenhängen.
Introduction
Entlang der Pazifikküste der USA sind viele der Arten wichtig für Gewerbe- und Freizeit Grundfisch Fischerei (z. B.die Drachenköpfe komplexe (Sebastes spp.) und Kabeljau (Ophiodon Elongatus)) stark verbunden mit Hochrelief, harten Boden Lebensräume1,2,3,4,5. Drop-Stereo-Video-Kameras sind ein attraktives nicht extraktiven Instrument, in felsigen Lebensräumen aufgrund der relativen Leichtigkeit und Einfachheit der Bedienung zu verwenden. Eine Vielzahl von Stereo-Video-Kamera-Systeme wurden entwickelt und in der südlichen Hemisphäre, Flachwasser-Ökosysteme6,7,8,9,10, bereitgestellt und vor kurzem haben video Drop-Kameras Zugkraft als Management-Tool für tiefes Wasser felsigen Riff Umgebungen entlang der Pazifikküste11,12,13gewonnen. Wir wollten diese bestehende Stereo-Kamera-Designs ändern, indem Sie ein Stereo-Video-Kamera-System (nachfolgend "Lander") effizienter Fischpopulationen in Hochrelief Seafloors entlang der zentralen Pazifikküste (siehe Tabelle des charakterisieren Materialien). Der Lander verwendet war anders als bestehende Videosysteme, weil Kameras zu einer zentralen drehenden Bar montiert wurden, die für eine volle 360 ° der Berichterstattung über den Meeresboden bei den Drop Position14erlaubt. Der Lander abgeschlossen eine volle Umdrehung pro Minute, was uns erlaubt, schnell charakterisieren die Fülle und Zusammensetzung eines Raums und erreichen das gleiche Maß an statistische Aussagekraft mit weniger Lander Bereitstellungen. (Siehe Starr (2016)14 für mehr Details über die Besonderheiten der Lander-Konfiguration). Vorversuche in das Studiensystem vorgeschlagen, dass acht Rotationen der Kameras an unseren Umfragen waren ausreichend Arten Fülle und Reichtum zu charakterisieren. Diese Bestimmung wurde durch eine Beobachtung von abnehmenden Wirtschaftserträgen Arten Fülle und Dichte der Fisch über längere Tropfen ernannt. Es wird empfohlen, eine Pilotstudie, einschließlich längere Weichzeiten in jedem neuen System die optimale Einweichen Zeit für einen gegebenen Ökosystem/Studie Arten bestimmt durchgeführt werden.
Mithilfe von gekoppelten Stereokameras beide Gesamtfläche Umfrage und absolute Fisch-Dichte pro video Umfrage berechnet werden kann; die Verwendung von rotierenden Kameras erforderte jedoch die Änderung der traditionellen Fisch-Graf-Metriken. Stationäre Videosysteme benutzte häufig "MaxN" als eine konservative Zählung der Fische eine Bereitstellung6,10. Traditionelle MaxN beschreibt die maximale Anzahl der Fische in einer bestimmten Art, die zur Vermeidung von Doppelzählungen ein Fisch, der verlassen und kehrte zu Frame hat zusammen in ein einzelnes Videobild beobachtet. MaxN wurde daher eine Schätzung der Mindestanzahl von Fischen bekannt anwesend sein und kann echte Fische Fülle6,10unterschätzen. MaxN-Metrik wurde neu definiert, um die größte Anzahl der Fische in jeder vollen Umdrehung der Kameras gesehen darzustellen.
Die zweite Änderung zum bisherigen Stereo-video Methoden war, die Tatsache berücksichtigen, dass Arten in verschiedenen Größen, Farben, und Formen haben unterschiedliche maximale Abstände der zuverlässigen Identifizierung. Zum Beispiel große Arten wie O. Elongatus haben eine ausgeprägte längliche Form und zuverlässig auf viel größere Entfernungen im Vergleich zu kleinen und kryptische Arten wie die Squarespot Drachenköpfe (Sebastes Hopkinsi) identifiziert werden können. Diese unterschiedlichen maximale Reichweiten der Nachweisbarkeit ändern der Wirkfläche Stichprobe von Lander für jede Spezies. Da die Stereo-Kameras uns jeder Fisch im dreidimensionalen Raum mit einem hohen Grad an Genauigkeit zu platzieren ermöglichen, kann man die Entfernung von den Kameras, die jeden Fisch war bestimmen gemessen (d. h., der "Z-Abstand", benannt nach der "z-Achse" ist senkrecht zu der geraden Linie zwischen den Kameras). Für jede Art der Abstand, in dem 95 % aller Personen (im folgenden "95 % Z-Abstand") beobachtet wurden, galt als der Radius des Messgebietes und diente zur Berechnung der gesamten Fläche befragt. Neben den artspezifischen Eigenschaften wird Identifizierbarkeit Umgebungsbedingungen z. B. Wassertrübung belastet. Da diese Faktoren in Raum und Zeit variieren können, ist es wichtig, die 95 % Z-Statistik nur in ihrer Gesamtheit zu verwenden. Während es hochpräzise für große Proben werden, kann jeder eine individuelle Umfrage in Bereich befragt variieren.
Die nachgenannten Protokoll enthält Anleitungen zum Erstellen und verwenden diese Metriken. Obwohl im Mittelpunkt stand die Tiefsee felsigen Lebensraum entlang der Pazifikküste zu charakterisieren, ist die Methodik beschrieben für modifizierte MaxN Graf leicht anwendbar auf alle rotierenden Drop-Kamera-System. Die Anzahl der Drehungen der Kamera benötigt, um die Fischbestände zu charakterisieren hängt von lokalen Ökosystem Dynamik, aber die Konzeptualisierung der modifizierten MaxN bleiben die gleichen. In ähnlicher Weise, während wir 3D photogrammetrische Software verwendet, um Stereo-Video analysieren, die hier beschriebenen Techniken leicht über Software-Plattformen, gelten, solange die genaue Position der Fische im dreidimensionalen Raum möglich ist. Darüber hinaus könnte der Ansatz der Anwendung eines 95 % Z Abstandswert in Zukunft Studien mit Stereo-Kameras um artspezifische reicht der Nachweisbarkeit zu berücksichtigen und zu Fisch Fülle genauer zu berechnen betrachtet werden.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
Hinweis: Screenshots der Software Schritte sind als Ergänzende Dateienenthalten. Bitte beachten Sie, dass die unten beschriebenen Software-Schritte für die gewählte Software spezifisch sind (siehe die Tabelle der Materialien). Das Gesamtkonzept kann auf jede Stereo-Softwareplattform erweitert werden.
1. bereiten Sie Stereo-Kamera-Aufnahmen für die Analyse
Hinweis: Die Kalibrierung mit Hilfe eines Kalibrierung Cubes wird empfohlen. Ein Kalibrierung Cube ist eine dreidimensionale Aluminiumrahmen mit exakt positionierten reflektierenden Punkten auf der Oberfläche. Bei Verwendung in Verbindung mit Kalibrierungs-Software führt ein Kalibrierung Cube zu größerer Präzision und Genauigkeit als Schachbrett Ansätze9.
- Kalibrieren Sie den Lander Kameras mit Stereo-Kalibrierungs-Software (Abbildung 1 und Abbildung 2; siehe Tabelle der Materialien für eine Software-Empfehlung).
Hinweis: Kalibrierung kann überprüft werden vor der Verwendung im Feld durch die Messung der Ziele von bekannten Größen in unterschiedlichen Abständen (siehe ergänzende Video 1). Durchschnittliche Messfehler für ein 50-cm-Ziel in einer Entfernung von 3 m (oder weniger) sollte innerhalb von 2 % der bekannten Ziellänge sein. Beachten Sie auch, dass eine bestimmte Kalibrierung werden nur gültig, wenn die Kamera-Positionen zueinander unverändert bleiben. Es ist wichtig zu kümmern und Vermeidung von unbeabsichtigten drängeln der Kameras bis alle Probenahme durchgeführt wurde. - Felddaten, die mit der kalibrierten Lander (Abbildung 1, ergänzende Video 2) zu sammeln.
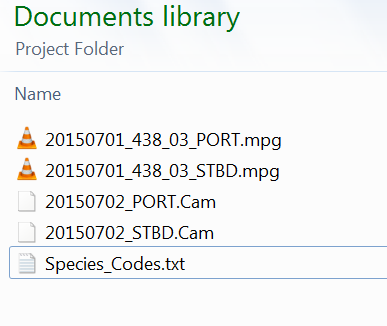
- Nachdem Feldstudie abgeschlossen ist, erstellen Sie einen neuen Projektordner mit Video-und Kalibrierung.
Hinweis: In jedem Projekt Ordner muss mindestens fünf Dateien: links und rechts ". Cam"Kalibrierung Dateien, die Links und rechts Videodateien (. MP4 oder. AVI-Format nur), und die Artenliste (.txt-Format). - In der Stereo-Mess-Software starten ein neues Projekt der Messung und entsprechende Video- und Kalibrierung Dateien zu laden.
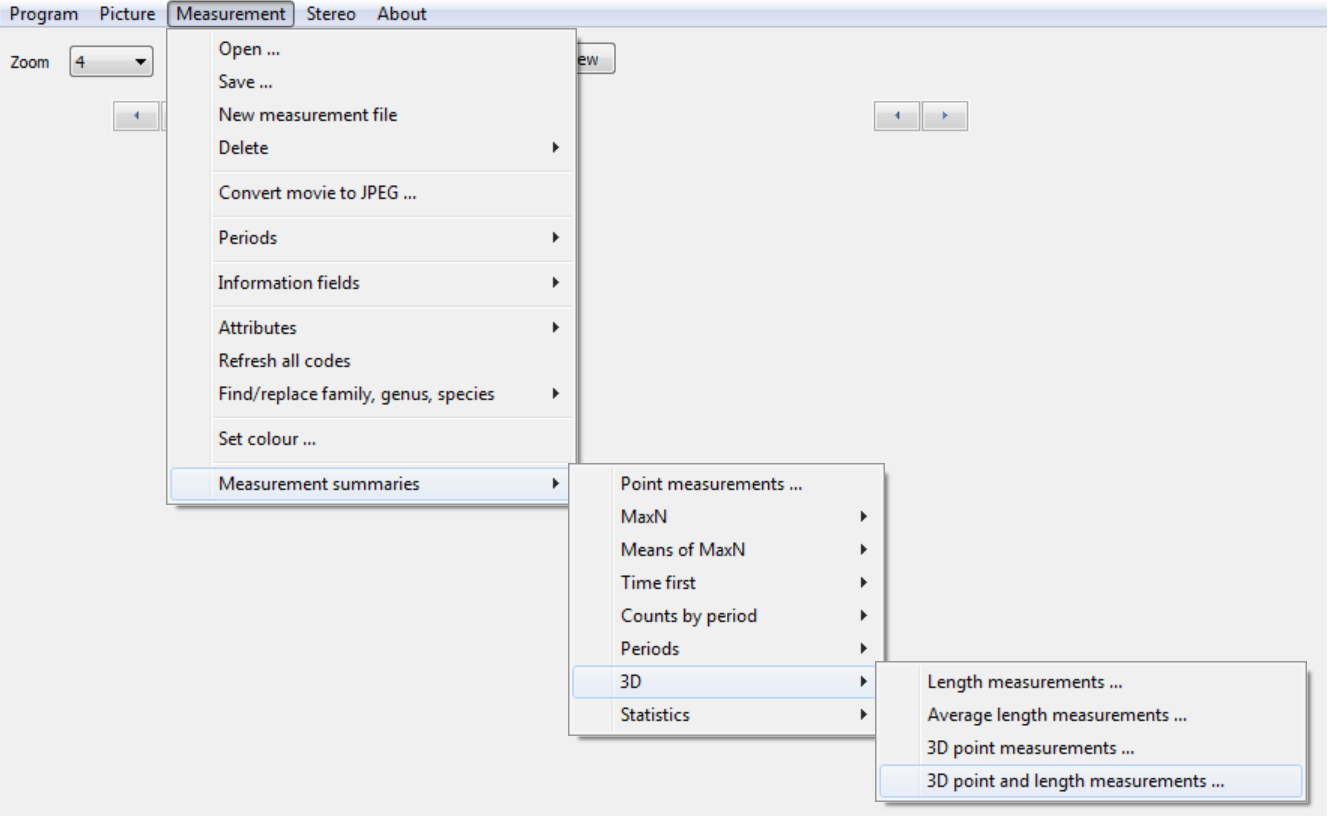
Hinweis: Screenshots aller Software-Schritte sind unter den Zusätzlichen Dateienzur Verfügung.- Navigieren Sie zur "Messung" > "Neue Messdatei".
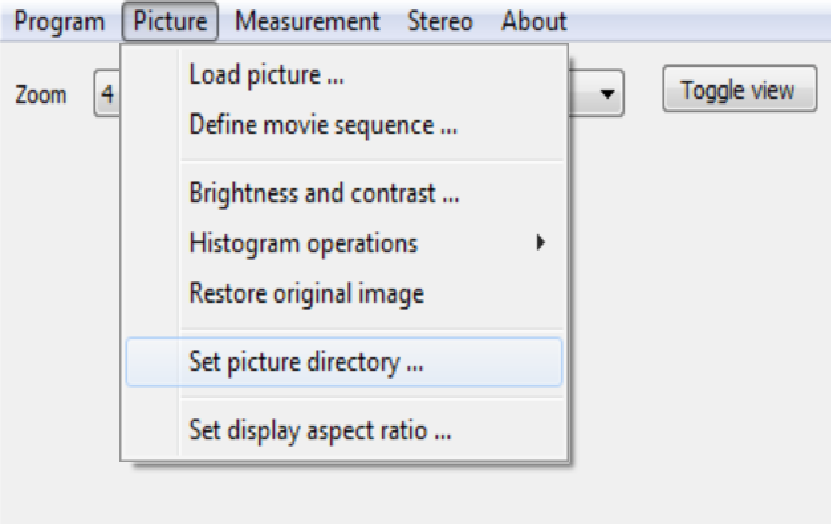
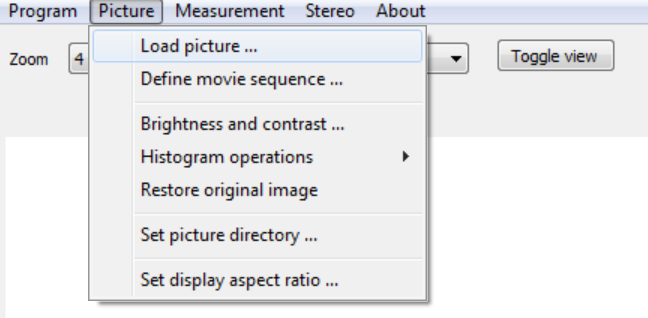
- Legen Sie das Bild-Verzeichnis durch navigieren zu "Bild" > "Set Bild Verzeichnis", und wählen Sie den Ordner mit allen Projektdateien.
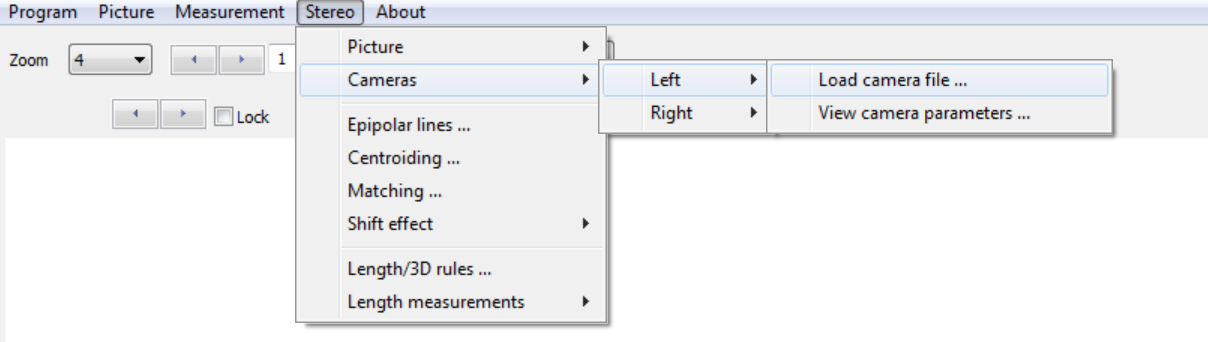
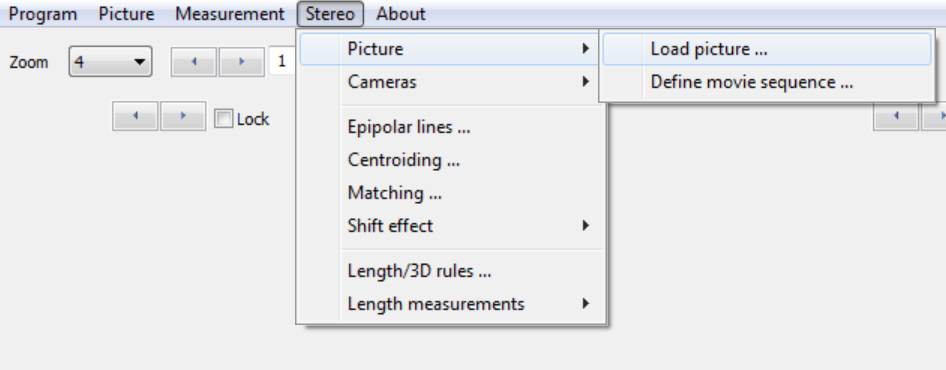
- Die linke Kamera laden ". Cam"navigieren zu"Stereo"Datei >"Kameras">"Linke">"Kamera-Datei laden"und die entsprechende Datei auswählen.
- Wiederholen Sie Schritt 1.4.3, die richtige Kamera zu laden ". Cam"Datei
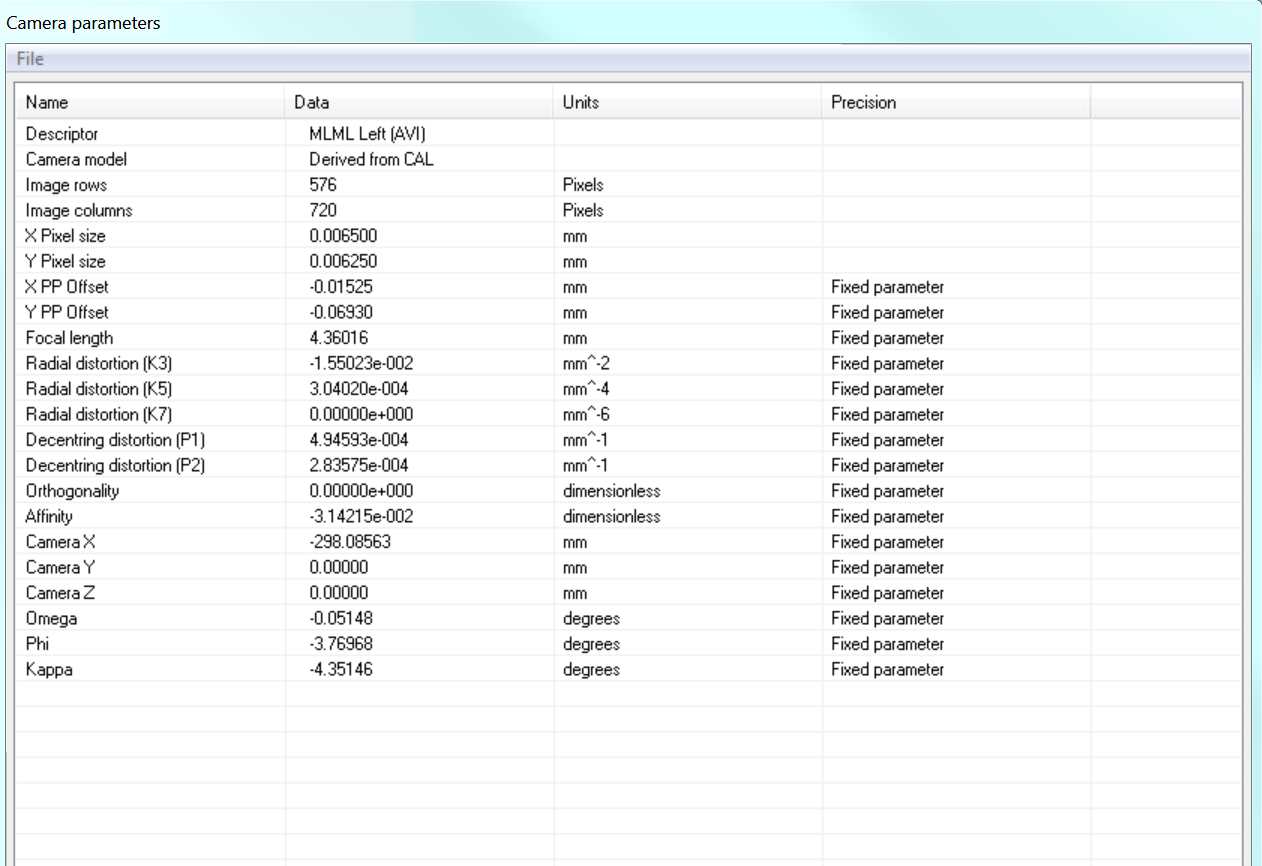
Hinweis: Diese Dateien enthalten Kalibrierung Messungen für jede Kamera (z.B., Pixelgröße, Seitenverhältnis, radiale Verzeichnung, Dezentrierung Verzerrung, etc.) und werden verwendet, um Fisch zu messen und berechnen Entfernung von Kamera (d.h., Z (Abstand). - Definieren der Filmsequenz für die linken Videodatei navigieren zu "Bild" > "definieren Filmsequenz" und die linke Kamera video Datei auswählen.
- Laden Sie die linken Videodatei in Mess-Software durch Auswahl von "Bild" > "Bild laden".
Hinweis: Achten Sie darauf, dass das Kontrollkästchen "Sperren" deaktiviert ist, bevor Sie video-Dateien laden. Dadurch können beide Videos gleichzeitig geladen werden. - Definieren Film-Sequenz und Last-video-Datei für das richtige Video über die Menüs "Stereo" > "Bild" > "definieren Filmsequenz" und "Stereo" > "Bild" > "Last Picture".
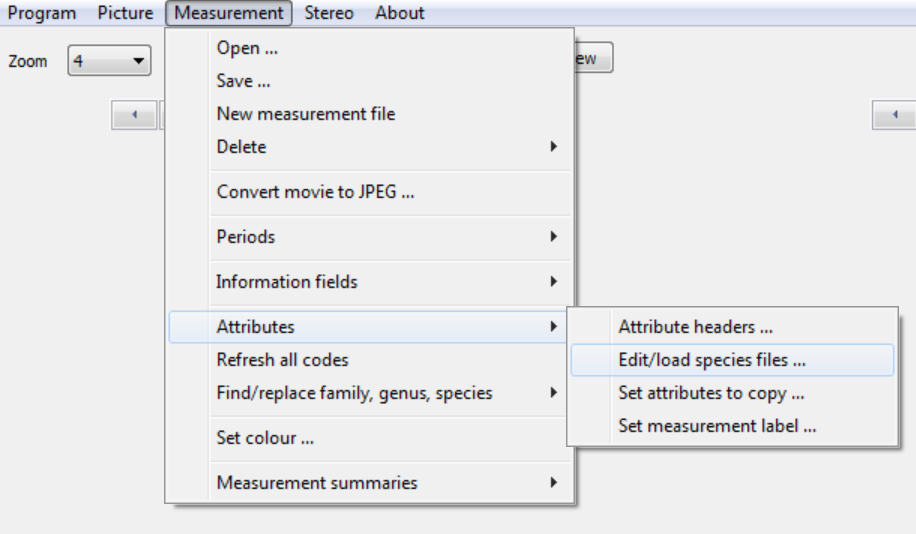
- Die Artenliste zu laden, indem man auf "Messung" > "Attribute" > "Datei bearbeiten/laden Arten".
- Geben Sie Umfrage-ID-Informationen unter"Informationen" > "Bearbeiten Feldwert" und speichern Sie die Datei erstellen ein. EMObs Projekt.
- Die Videos mit Lichtblitz, Händeklatschen, Coordinated Universal Time (UTC) Stempel oder jeder Zeit bestimmten Ereignis tritt auf, in beiden Videos zu synchronisieren.
- Wenn UTC-Zeitstempel verwenden, Frame-Schritt nach vorn in das linke Video bis die Zeitstempel einer neuen zweiten beginnt. Tritt ein anderes Frame vorwärts bis Lichtblitz oder Händeklatschen.
- Frame-Schritt das richtige Video nach vorne, bis die Zeitstempel der linken Video genau entspricht. Anderes Frame Schritt vorwärts bis genau in dem Moment der Lichtblitz oder Händeklatschen, das linke Video entspricht.
Hinweis: Es ist wichtig, dass Videos mit dem gleichen Rahmen synchronisiert werden. Video-Synchronisation sollte überprüft werden, in regelmäßigen Abständen mit dem video Zeitstempel Kamera Frame Drift während der Analyse zu vermeiden. Ein Donnerschlag gefilmte Hand könnte auch am Anfang und Ende des Videos verwendet werden, um dieses Recht zu testen und links Videos wurden mit dem gleichen Rahmen synchronisiert.
- Klicken Sie auf "Sperren" damit Videos zusammen spielen und Synchronisation zu erhalten.
(2) Punktanzahl erzeugen und berechnen von MaxN
Hinweis: Jeder Fisch ist zunächst mit einem 2D Punkt auf die niedrigste mögliche taxonomische Auflösung markiert. Fisch mit unsicheren ID sollte für eine spätere Überprüfung markiert werden.
- Warten Sie, bis die Fische bis zum Jahresende eine komplette Kamera-Rotation um sicherzustellen, dass eine volle 360 Grad dient zu zählen beginnen. Auch warten, bis Sediment gelöscht hat (in der Regel < 1 – 2 min. nach Kontakt mit Boden).
- Sobald der Lander die erste Rotation beginnt, rechts klicken und um eine neue Sample-Periode zu definieren: "Periodendefinitionen" > "Neue Startperiode hinzufügen". Geben Sie erste Periode als "01 ein" und klicken Sie auf "OK".
- Beginnen Sie der Lander dreht, Kennzeichnung jeden Fisch, den Rahmen mit einem 2D Punkt mit der linken Kamera nur erbt.
- Um einen 2D Punkt hinzuzufügen, wählen Sie "Add Punkt" einen Rechtsklick und wählen Sie die richtige Artname. Beschriften Sie, die niedrigste mögliche taxonomischen Ebene, Auswahl "SPP" für unbekannte Spezies und klicken Sie auf "OK".
- Weiterhin jeden neuen Fisch gemäß Schritt 2.2.1 bis zum Abschluss der Rotation zu kennzeichnen.
- Wiederholen Sie Protokoll Verfahren 2.1-2.2 für jedes zusätzliche Lander-Drehung - um sicherzustellen, dass eine neue Periode zu Beginn einer Kamera Drehung definiert ist.
Hinweis: Arten Ansammlung Kurven wurden verwendet, um festzustellen, dass acht Drehungen waren, durchschnittlich, ausreichend Fisch Fülle in der vorliegenden Studie zu charakterisieren. Forscher sollten Durchführung von Vorversuchen mit zusätzlichen Kamera Rotationen über längere Weichzeiten, um die optimale Anzahl der Kamera Rotationen innerhalb eines bestimmten Ökosystems zu charakterisieren. - Artspezifische Grafen von Individuen beobachtet pro Kamera-Rotation zu berechnen.
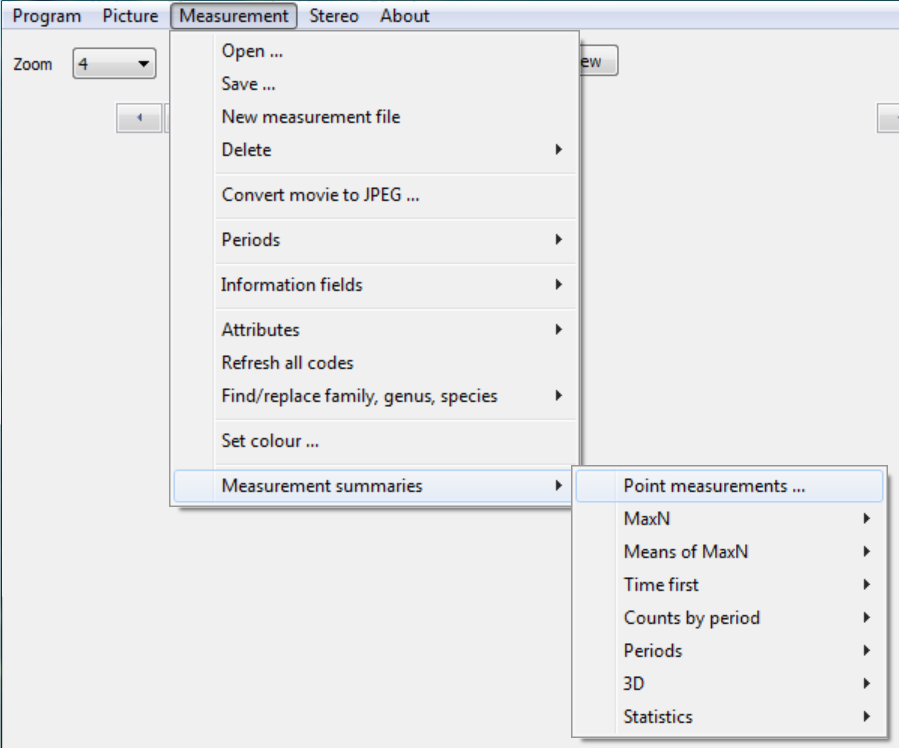
- Nachdem alle Rotationen aufgelistet wurden, export 2D Punkte durch navigieren zu "Messung" > "Messung Zusammenfassungen" > "Punktmessungen" und 2D Punkte als a.txt-Datei speichern.
- Öffnen Sie die gespeicherte 2D.txt-Point-Datei als Tabelle und erstellen eine PivotTable Arten vs. Drehzahl zählt (Tabelle 1) zusammenfassen, indem man auf "Einfügen" > "PivotTable". Wählen Sie "Gattung und Art" für "Zeilenbezeichnung" und "Zeit" für "Spaltenbeschriftung".
- Wählen Sie die MaxN für jede Art durch die Auswahl der Kamera-Rotation, die die größte Zahl von Individuen dieser Art (Tabelle 1).
- Wählen Sie für Fische, die nur zur Gattung identifiziert eine Gattung-Ebene MaxN basierend auf die Drehung, die die größte Zahl von Individuen, die identifizierten Arten dieser besonderen Gattung hatte.
Hinweis: Dieser Schritt hilft, um einzelne Fische Doppelzählungen zu vermeiden, die nur für höheren taxonomischen Gruppen (z. B.nur zur Gattung oder Familie) identifizierbar waren. Zum Beispiel in Tabelle 1"Drehung 1' enthielt 10 unbekannte Sebastes spp. und 33 Mitglieder der Gattung Sebastes identifizierten Arten, während" Drehung 3' enthalten nur zwei nicht identifizierte Sebastes spp. und 43 Mitglieder die Gattung Sebastes , Arten identifiziert. Daher "Drehung 3' würde verwendet werden, für MaxN Anzahl von unbekannten Sebastes spp. Auf diese Weise ist die konservative Annahme gemacht, dass 8 von den unbekannten Sebastes spp. in "Drehung 1' wurden" Drehung 8'. - Wenn mehrere Rotationen die gleiche Anzahl von MaxN für eine gegebene Art haben, wählen Sie die erste Drehung mit MaxN für 3D Punktmessungen.
- Nehmen Sie für jede Art 3D-Messungen von Fischen in der Rotation, die MaxN aufgetreten sind.
- Verwenden Sie die gespeicherte 2D Punkte gesammelt in Schritten 2,1-2,3, navigieren Sie zu den exakt gleichen Fisch für 3D Messung.
- Zoom in mindestens 4 X, um besser zu identifizieren, die Spitze der Fisch Schnauze und Kanten der kaudalen flossen (Abbildung 3).
Hinweis: Es möglicherweise notwendig, Frame Schritt vorwärts oder rückwärts, um die beste Orientierung der Fische für eine 3D Messung zu finden. Die "besten" Ausrichtung gehört, wo sind die Schnauze und die Kanten der kaudalen Rippen sichtbar in beiden Kameras. - Manuell an der Spitze der Schnauze, dann den Rand der Schwanz in die linke Kamera klicken Sie, dann wiederholen Sie die Auswahl in der gleichen Reihenfolge in das richtige Video.
- Wählen Sie richtige Speziesidentifizierung aus Dropdown-Menüs wie in 2.2.1 getan wurde.
- Wenn ein 3D Längenmessung für Instanz wenn Kopf und Schweif des Fisches nicht sichtbar in beiden Kameras sind dann markieren Sie einen 3D Punkt stattdessen per Linksklick die gleiche Position der Fische in den linken und rechten Videos nicht möglich ist. Füllen Sie die Felder wie vor und der Kommentar "Längenmessung ausschließen".
Hinweis: MaxN kann auf verschiedene Drehungen der Kameras für verschiedene Arten auftreten. für irgendeine gegebene Sorte sollte jedoch Messungen nur eine Umdrehung (Tabelle 1) auftreten.
- Exportieren Sie nach Abschluss der 3D-Messungen für alle Fische Daten as.txt Datei zur weiteren Analyse.
- Navigieren Sie zur "Messung" > "Messung Zusammenfassungen" > 'Point- and -Länge 3D-Messungen' und save.txt-Datei zu exportieren.
(3) 95 % Z Abstand Verfahren für artspezifische Umfrage Bereiche
Hinweis: Die 95 % Z-Abstand ist eine Schätzung der durchschnittlichen Entfernung, die eine Art in einer bestimmten Studie unter Ausschluss von Fällen von Ausnahmebedingungen der Klarheit des Wassers oder Beleuchtung zuverlässig identifiziert werden konnten. Diese Berechnung berücksichtigt die durchschnittliche ozeanographischen Bedingungen einer bestimmten Studie und werden für jede neue Studie neu berechnet werden müssen.
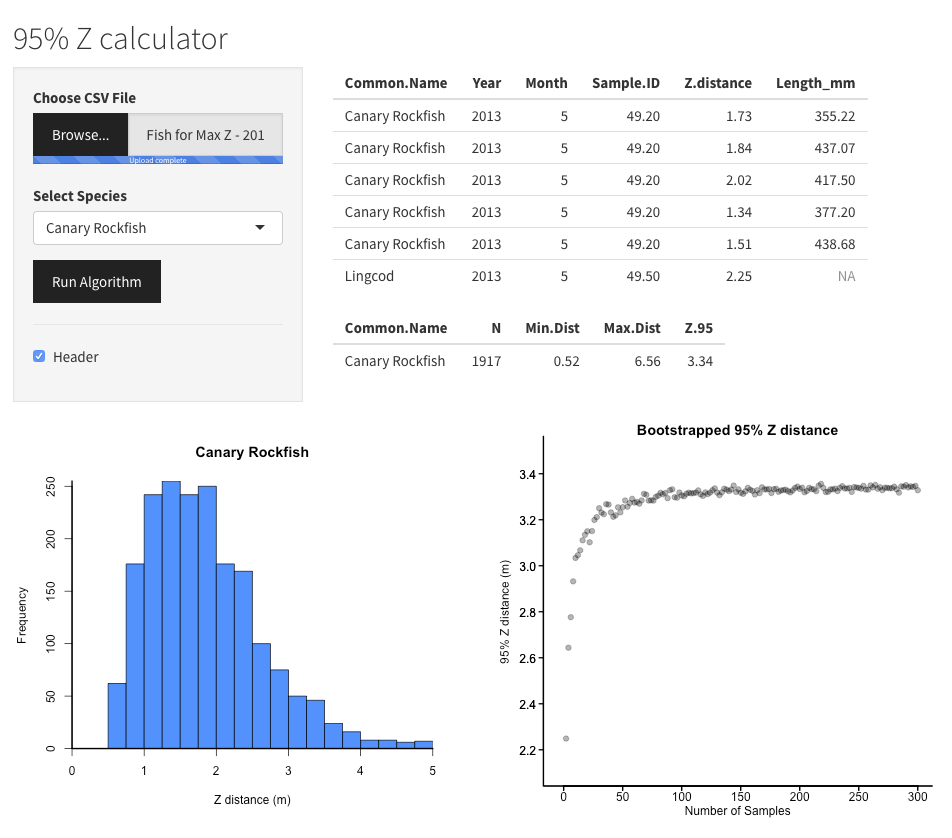
- Verwenden Sie einfache bootstrapping, um festzustellen, ob die Größe der Stichprobe groß genug, um den Abstand der zuverlässige Erkennung für jede Art zu charakterisieren ist.
- Für jede Probe Größenklasse (z.B.Probe Größe Behälter 5 Fische), nehmen Sie 1.000 zufällig zieht der Stichprobe-Größe mit Ersatz aus der Probe Bevölkerung und berechnen Sie den Mittelwert, die 95 %-Quantil der Entfernungen von diesen 1.000 zeichnet und Handlung, die daraus resultierenden asymptotische Kurve. Zusätzliche Dateien 1und 2 zur Verfügung gestellte Code zu sehen.
- Überprüfen Sie, ob ausreichende Proben gewonnen wurden, indem Sie vergleichen die tatsächliche Stichprobengröße mit 95 % Z Abstand Asymptote mit steigendem Stichprobenumfang.
- Berechnen Sie den 95 % Z Abstandswert als das 95 %-Quantil der Entfernung von Kamera über alle Umfragen für eine Art gemessen.
- Berechnen Sie die wirksame Fläche Befragten für jede Spezies mit dem 95 % Z-Wert.
Hinweis: Im Falle einer rotierenden Lander sind der 95 % Z-Wert entspricht der äußere Radius von einem Befragten Schwad mit dem inneren Radius durch die physische Einrichtung des Werkzeugs bestimmt und wie nah an der Basis der Kameras beobachten können. Wie die Lander dreht, entsteht ein "Donut" förmigen Messgebietes (Abbildung 4).- Berechnen Sie Fläche als befragt:

Hinweis: zum Beispiel eine relativ großen Arten wie Yelloweye Drachenköpfe (Sebastes Ruberrimus) eine 95 % Z-Abstand von 3,3 m und eine wirksame Erhebung Fläche von 30,9 m2 pro Lander Bereitstellung hatte: 34,3 m2 (Außenkreis) - 3,4 m2 (Inner Kreis) = 30,9 m2 (Gesamtübersicht Bereich).
- Berechnen Sie Fläche als befragt:
- Die berechnete Fläche mit Befragten (Schritt 3.3.1), Konvertieren einzelner Arten zählt (MaxN) in Dichte Schätzungen für jede visuelle Umfrage unter Verwendung der Gleichung:

Hinweis: Ein ähnliches Verfahren könnte verwendet werden, um eine volumetrische Dichte anstatt einer Flächendichte zu berechnen; Dieser Prozess wird hier nicht beschrieben.



Tabelle 1: Beispiel MaxN Übersichtstabelle. Die Auswahl der MaxN für jede Sorte wird mit rot und Fett Text demonstriert. Beachten Sie, dass eine konservative MaxN für nicht identifizierte Sebastes spp. durch die Rotation mit den meisten Sebastes identifizierten Arten (Drehung 3) ermittelt wurde. Auch während dieser Studie acht Kamera Rotationen verwendet, sind nur vier Rotationen in Tabelle 1 für Einfachheit angezeigt. Das Verfahren zur Auswahl von MaxN ist identisch, unabhängig von der Anzahl der Umdrehungen.

Abbildung 1: Stereo video Lander. Wichtige Hardware ist nummeriert (1) 300 m Nabelschnur, (2) zwei digitale Videorekorder (DVR) mit abnehmbaren 32 GB Speicherkarten in wasserdichte Flasche, (3) zwei LED-Leuchten klarmachen 3.000 Lumen bei einer Farbtemperatur von 5.000 K und (4). zwei Kameras mit 620 TV-Linie (TVL) Auflösung. Bitte klicken Sie hier für eine größere Version dieser Figur.

Abbildung 2: Kalibrierung Würfel (500 x 500 x 300 mm). Beispiel für eine Kalibrierung mit einem "Kalibrierung Cube" in zwei verschiedenen Ausrichtungen dargestellt: (A) der rechten Seite des Würfels ist in Richtung Kameras herausgedrückt, und (B) die Seite des Würfels ist parallel zur Fläche der Kameras. Rote Punkte bezeichnen die Referenzpunkte in diese besondere Kalibrierungsmethode verwendet und müssen immer in der nummerierten Reihenfolge identifiziert werden. Bitte klicken Sie hier für eine größere Version dieser Figur.

Abbildung 3: 3D Messung auf Sebastes Miniatusgelegt. Die Spitze der Schnauze und Schwanzende wurden identifiziert, in jede Kamera-Frame, um Stereo-Messung zu ermöglichen. Bitte klicken Sie hier für eine größere Version dieser Figur.

Abbildung 4: Gebiet vom Lander Tool befragt. Nutzfläche von Werkzeugs Lander Befragten wurde durch die minimale Abstand Z und der 95 % Z-Abstand für die einzelnen Arten begrenzt. Beachten Sie, dass dieser Bereich ein "Donut" förmigen Umfrage Volumen rund um den Lander erstellt. Bitte klicken Sie hier für eine größere Version dieser Figur.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Zwischen 2013 und 2014 führten wir 816 Umfragen mit der rotierenden Stereo-Video-Lander (Abbildung 1) entlang der zentralen Küste von Kalifornien und MaxN und 95 % Z Abstand (Abbildung 4) Daten über mehr als 20 Arten. Es gab klare Muster in den Wirkbereich nachweisbaren Arten beobachtet, wahrscheinlich durch das Zusammenspiel der Arten Größe, Form und Färbung (Abbildung 5). Zum Beispiel hat die Flagge Drachenköpfe (Sebastes Rubrivinctus) deutliche Streifenbildung auf seinen Seiten ermöglicht zuversichtlich Identifikation in größerer Entfernung als andere Arten von vergleichbarer Größe. In ähnlicher Weise Kanarischen Drachenköpfe (Sebastes Pinniger) sind relativ groß, körperreich, aber haben eine Pigmentierung, die ähnlich wie bei anderen Arten ist, so dass es immer schwieriger, im Abstand (Abbildung 5) zu erkennen.
Wir verwenden zwei Arten zeigen die Berechnungen von MaxN und 95 % Z Abstandswerte: Pygmäen Drachenköpfe (Sebastes Wilsoni) und Kabeljau (O. Elongatus). Ersteres ist ein klein-bodied Fisch, das schwierig sein kann, auf Distanz zu identifizieren; während O. Elongatus relativ groß ist, hat eine klare Form, und ist leichter zu identifizieren. Ab 2013 / 2014 waren 1.191 Messungen für S. Wilsoni und 1.222 Messungen für O. Elongatus gesammelt. Dann, die 95 %-Quantile der Entfernungen, bei dem diese Arten beobachtet wurden: 95 % Z Entfernungen wurden 2,65 m S. Wilsoni und 3,96 m für O. Elongatus (Abbildung 5) berechnet wurden. Diese 95 % Z Abstände übersetzen in effektive Umfrage Bereiche von 18,6 m2 und 46,0 m2 für S. Wilsoni und O. Elongatus . Eine einfache bootstrap Analyse bestätigt, dass ausreichende Probe Größen zur Charakterisierung von 95 % Z Abstandswerte erhalten wurden. Für beide Arten wurden die Schätzung von 95 % Z Abstand stabilisiert, wenn größer als 50 Umfragen mit dieser Arten gesampelt, bietet starke Hinweise, dass die gewählten Stichprobenumfänge mehr als ausreichend waren, um der Wirkfläche Lander Probe für diese charakterisieren Arten (Abbildung 6).
MaxN zählt pro Umfrage dann in Dichte (Anzahl der Fische/m2) umgewandelt wurden. Wir verwendet Dichte Schätzungen aus den 816 Erhebungen, um die Hypothese zu testen, dass Dorschen und Pygmäen Drachenköpfe würde in erster Linie auf Hochrelief Lebensräumen beobachtet werden. Für beide Arten waren deutlich höhere dichten über hohe und mittlere Relief im Vergleich mit flachem Relief Lebensräume (Kruskal-Wallis, p <<. 001; ( Abbildung 7). Diese Ergebnisse entsprachen bereits berichtet Lebensraum Verbände für beide Arten15. Es gab keine Unterschiede zwischen Medium und Hochrelief Lebensraum für beide Arten.
Um zu verstehen wie die rotierenden Lander im Vergleich mit herkömmlichen stationären Kamerasysteme, geschätzt wir Unterschiede in der Dichte und Variabilität schätzt zwischen einer sich drehenden und eine simulierte stationäre Lander. Wir dachten, ein typisches stationäre Single-Kamera-Lander hätte eine 90-Grad-Blickfeld. Der rotierende Lander hat einen 60-Grad-Blickfeld und erfordert 5 Sekunden der Rotation eine 90-Grad-Ansicht. Mit 261 Umfragen, wählten wir Fisch Beobachtungsdaten aus den mittleren 5 Sekunden Lander Rotationen, MaxN zu etablieren. Dichte nach Schätzungen für die Pseudo-stationäre Lander wurden standardisiert durch die Verwendung der reduzierten Bereiche der Abdeckung (d.h.ca. ¼ Bereich der rotierenden Lander). Unterschiede in der mittleren Dichte und Variationskoeffizienten zwischen rotierenden und Pseudo-stationäre Landers wurden mit Welch es t-Test ausgewertet. Meine dichten erhalten durch die rotierenden Kamera waren 18 % größer als bei stationären Kameras (Welch es t21,7, p = 0.081, Abbildung 8A). Darüber hinaus wurde der Variationskoeffizient mit der stationären Kamera im Vergleich zu Kameras drehen 1,8 Mal höher (Welch es t15.1, p < 0,001, Abbildung 8).

Abbildung 5 : Z Entfernungen für ausgewählte Arten beobachtet. Rote vertikalen Balken kennzeichnen die Z Mindestabstand (0,81 m von Kameras) auf der linken Seite und den 95 % Abstand Z Wert auf der rechten Seite. Beachten Sie, dass das durchschnittliche effektive Messgebietes rund um den Lander für jede Art darstellt. Bitte klicken Sie hier für eine größere Version dieser Figur.

Abbildung 6 : Bootstrapped Abstandswerte Z. Bootstrapping um die Stichprobengröße für (A) S. Wilsoni und (B) O. Elongatus Beobachtungen zu erhöhen. Probengrößen von 3-300 wurden jeweils 1.000 Mal bootstrapped um die mittlere Entfernung von 95 % Z berechnen und überprüfen, ob die Stichprobengrößen ausreichend waren. Anmerkung, die die y-Achse Werte von 2.0-2.6 m für S. Wilsoni und von 2,6-4,0 m für reichen O. Elongatus. Bitte klicken Sie hier für eine größere Version dieser Figur.

Abbildung 7 : Lebensraum Unterschiede für zwei ausgewählte Arten. Durchschnittliche Dichte (± SE) (A) S. Wilsoni und (B) O. Elongatus gemessen auf Low, Medium und High Relief Rock Lebensraum. Bitte klicken Sie hier für eine größere Version dieser Figur.

Abbildung 8 : Unterschiede zwischen rotierenden und Pseudo-stationäre Landers. Beide Schätzungen von (A) bedeutet, dass die Dichte (Fische/m2 ± SE) und (B) mittlere Koeffizient der Variation (CV) ± SE für 261 Umfragen präsentiert werden. Bitte klicken Sie hier für eine größere Version dieser Figur.

Ergänzende Video 1: Überprüfung der Kalibrierung. Kalibrierung kann durch Messung der Ziele von bekannten Größen in unterschiedlichen Abständen vor Gebrauch im Feld überprüft werden. Bitte klicken Sie hier, um dieses Video anzusehen. (Rechtsklick zum download)

Ergänzende Video 2: Unterwasser Umfrage Footage. Bitte klicken Sie hier, um dieses Video anzusehen. (Rechtsklick zum download)
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Die traditionelle MaxN-Metrik beruht auf der Idee des Zählens einer garantierte Mindestanzahl von Personen im Rahmen einer Umfrage. Wenn eine bestimmte Anzahl von Fischen in ein einzelnes Videobild gleichzeitig sichtbar sind, kann kein weniger vorhanden sein, aber da Fisch mobil und heterogen verteilt sind, ist die Wahrscheinlichkeit, dass alle Personen gleichzeitig zu sehen, während ein einzelnes Videobild niedrig . Es ist daher wahrscheinlich, dass traditionelle MaxN wahre Fisch Fülle16,17unterschätzt. Darüber hinaus wurde nachgewiesen, dass traditionelle MaxN nichtlineare negativ voreingenommen Beziehungen mit steigenden Fisch Häufigkeiten16,18anzeigen kann. Dies kann mit dem Phänomen der Gang Sättigung bezogen werden, wobei relative Häufigkeit Indizes nicht erkennen, dass wahre Fülle19,20erhöht. Dagegen die scheinbare Stabilität eines Indexes mit wirklich rückläufig Fisch Fülle hat genannt "Hyperstability", und führen letztlich zum Absturz von Fisch Populationen21,22. Eine aktuelle Studie berichtet, dass Instabilität in MaxN gelindert werden könnte, durch die Erhöhung der Befragten Sichtfeld16. In dieser Studie wurde die Beziehung zwischen MaxN und wahre Fülle immer linear, als das Sichtfeld 100 % (d.h.360 Grad) näherte.
Die Ergebnisse aus der stationären Kamera-Simulation zeigen Kongruenz mit diesen früheren Ergebnissen und legen nahe, dass der MaxN Wert Fisch Fülle besser charakterisieren kann. Zum Beispiel verringerte sich der geschätzte mittlere Koeffizient der Varianz unter Dichte Schätzungen aus den rotierenden Lander im Vergleich zu den Pseudo-stationäre Lander abgeleitet. Dies ist wahrscheinlich, dass Fische sind heterogen verteilt, und dass stationäre Kameras sind eher zu "verpassen" die Fische vorhanden, wenn der Lander in die falsche Richtung zeigt. Rotierende Landers maximieren Probenahme Aufwand durch die Erhebung der vollen 360 Grad um das Werkzeug und der Netto-Effekt ist Reduzierung der Probenahme Kosten und Varianz, und erhöhen die statistische Aussagekraft der Studie. Zukünftige Studien könnte besser dieses Problems durch die Prüfung direkt eine rotierende Lander mit einer separaten stationären Lander in einer gekoppelten Erhebungsdesign. Ebenso konnten wir direkt auf die Beziehung zwischen MaxN und wahren Reichtum in dieser Studie zu testen, und zukünftige Studien könnten dies mittels entweder Simulation direkt testen oder kontrollierten Umgebungen, wie Campbell (2015)16.
Eine mögliche Kritik an der modifizierten MaxN-Ansatz ist die Möglichkeit der doppelten zählen Einzelpersonen. Da der Lander eine volle Umdrehung pro Minute machte, und die benthischen Arten von Interesse im Ökosystem tendenziell relativ sesshaft und langsame Bewegung unter den meisten Bedingungen, glauben wir, dass das Risiko einer doppelten Erfassung gering war. Darüber hinaus wurden Fälle wo Fisch würde betreten oder verlassen des Messgebietes im Laufe von acht Drehungen beobachtet. Zusätzliche Vorkehrungen wurden doppelt zählen z. B. die Verwendung der Rotation mit der größten Anzahl von Individuen einer bestimmten Gattung nicht identifizierte Arten zu zählen zu vermeiden. Andere Metriken sind wie die Indizes der Fisch Fülle wie meine Count vorgeschlagen worden; Diese haben jedoch auch gezeigt, wahre Fülle konsequent zu unterschätzen, während Erhöhung der Variabilität unter Dichte16schätzt. MaxN empfiehlt sich daher als eine genauere Metrik der Fisch Fülle. Während unsere modifizierten MaxN-Metrik keine konservative Schätzung der absolute minimale Anzahl von Personen zu gewährleisten, sind wir insgesamt zuversichtlich, dass dieser modifizierten MaxN-Ansatz bessere Schätzungen der wahre Fisch Fülle bietet, und diese übermäßig zählen Fisch der ist relativ geringe Bedeutung.
Viele Seite-Anzeige Video-Transekt Umfragen Verwendung einer festen Transekt Breite, Dichte für alle Tierarten zu schätzen. Ebenso wäre ein Ansatz zur Verwendung von Stereo-Video Landers eine maximale Entfernung von Kamera verwenden, um beide untersuchten Fläche berechnen und Dichte zu fischen. Beide führen zu eine Unterschätzung der Arten, die nur für kleinere Strecken als die feste Breite Schätzungen23Transekt zuverlässig identifizierbar sind. Die Entfernung einer Spezies zuverlässig identifiziert wird verursacht durch das Zusammenspiel von Faktoren wie Größe, Form, Färbung Muster, Fisch Verhalten sowie Umweltfaktoren. Die 95 % Z Distance-Methode ist besonders vorteilhaft, da es das Zusammenspiel all dieser Faktoren gleichzeitig ausmacht. Zum Beispiel war O. Elongatus Arten, die wir in der Lage, zu den größten Abstand, wahrscheinlich durch seine ausgeprägte, großen, länglichen Körperform und Verhalten tendenziell lag auf dem Meeresboden zu identifizieren sind. Rosig Drachenköpfe (Sebastes Rosaceus) war eine der kürzesten Z Entfernungen, wahrscheinlich, weil Sie als Mitglied der Untergattung Sebastomus , hat es verschiedene Kongenere, die ähneln sich sehr und sind schwer zu erhöhten Abständen unterscheiden. Dadurch, dass für die Spezies-spezifische Gebiete von der Lander Befragten, möglicherweise wir Fisch Fülle genauer abschätzen. Der bootstrap Ansatz zur Probe Größe Überprüfung ist einfach und leicht umgesetzt in anderen Erhebungen, und wir glauben, dass die Methode von 95 % Z Abstand konnte weiter angepasst werden, um die Zeile unterbringen Transekt Erhebungsdesign. 95 % Z Abstand würde dann einen horizontalen Abstand von zuverlässige Erkennung für mit Tauchpumpe oder ferngesteuertes Fahrzeug (ROV) Tools beobachteten Arten darstellen. In Zukunft können Forscher untersuchen mit Abstand Sampling Theorie Modell Dichte als Funktion der Nachweisbarkeit mit Abstand23,24.
Da gibt es stärkere Nutzung von Fischereiverbot in der Fischerei-Management25,26,27, gibt es ein zunehmender Bedarf an nicht extraktiven Sampling-Techniken, vor allem im tiefen Wasser Lebensräume für Taucher nicht zugänglich Umfragen. Es ist jedoch auch notwendig, dass diese Techniken präzise, zuverlässige Daten über die Fische Länge, Fülle und Arten-Zusammensetzung liefern. Video Landers sind eine relativ neue monitoring-Tool, die eine kostengünstige, auf relativ kleine Schiffe Gelegenheit bedient werden, und sind logistisch einfacher zu bedienen als ROVs und Tauchboote erfordert weniger und weniger qualifiziertes Personal. Zwar nicht in diesen Methoden diskutiert, sind Stereo-Kamera Landers in der Lage, präzise Längenmessungen mit Fehler weniger als 2 %. Darüber hinaus können Landers schnell über große geographische Gebiete bereitgestellt werden, erhöhen statistische Inferenz. Wir erwarten, dass das Interesse an Video Überwachungs-Tools wie Forschung Agenturen Blick zu straffen Haushalte und effizienter verteilt Probenahme Aufwand erhöhen. Unsere Modifikation von MaxN und 95 % Z Abstand sollte in Zukunft ökologische Studien unter Verwendung von rotierenden video Landers betrachtet werden.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Die Autoren haben nichts preisgeben
Acknowledgments
Diese Arbeit wurde von The Nature Conservancy und privaten Spendern, Ressourcen Vermächtnis Stiftung Gordon und Betty Moore Foundation, Environmental Defense Fund, Kalifornien Meer Grant Program, NMFS National Cooperative Research Program und einem NOAA finanziert. Saltonstall Kennedy Grant #13-SWR-008. Marine Applied Research and Exploration (Dirk Rosen, Rick Botman, Andy Lauerman und David Jefferies) entwickelt, gebaut und gewartet werden die video-Lander-Tool. Wir bedanken uns bei Jim Seager und SeaGIS™-Software für den technischen Support. Kapitän und kommerzielle Fischer Tim Maricich und crew an Bord die F/V Donna Kathleen bereitgestellten Unterstützung bei der Bereitstellung des Lander von 2012-2015. Vielen Dank an alle, die Videodaten Erfassung oder Analyse (Anne Tagini, Donna Kline, Lt. Amber Payne, Bryon Downey, Marisa Ponte, Rebecca Miller, Matt Merrifield, Walter Heady, Steve Rienecke, EJ Dick und John Field) teilgenommen.
Materials
| Name | Company | Catalog Number | Comments |
| calibration cube | SeaGIS | http://www.seagis.com.au/hardware.html | 1000x1000x500 mm is the preferred dimensions. Other methods of calibration are available. |
| CAL calibration software | SeaGIS | http://www.seagis.com.au/bundle.html | |
| EventMeasure stereo measurement software | SeaGIS | http://www.seagis.com.au/event.html | |
| Statistical software | R Core Team 2017 (v. 3.4.0) | Bootstrapping code can be found: https://github.com/rfields2017/JoVE-Bootstrap-Function | |
| Spreadsheet Software | Microsoft Excel | ||
| 2 waterproof cameras | Deep Sea Power and Light | HD quality preferred | |
| 2 depth rated, waterproof lights | Deep Sea Power and Light : 3000 lumen LED with 5000k color temperature | ||
| DVR recorder | Stack LTD DVR | ||
| standard PC | Windows 10 preferred OS | ||
| rotating Lander platform | Marine Applied Research and Engineering (MARE) |
References
- Love, M. S., Yoklavich, M. M., Thorsteinson, L. K. The Rockfishes of the Northeast Pacific. , University of California Press. Berkley. (2002).
- Laidig, T. E., Watters, D. L., Yoklavich, M. M. Demersal fish and habitat associations from visual surveys on the central California shelf. Estuar. Coast. Shelf Sci. 83 (4), 629-637 (2009).
- Anderson, T. J., Yoklavich, M. M. Multiscale habitat associations of deepwater demersal fishes off central California. Fish. Bull. 105 (2), 168-179 (2007).
- Yoklavich, M. M., Cailliet, G. M., Sullivan, D. E., Lea, R. N., Love, M. S. Habitat associations deep-water rockfishes a submarine canyon an example of a natural refuge. Fish. Bull. 98 (3), 625-641 (2000).
- Status of the Pacific Coast Groundfish Fishery, Stock Assessment and Fishery Evaluation. , Pacific Fishery Management Council. Portland, OR. (2016).
- Cappo, M., Harvey, E., Malcolm, H., Speare, P. Potential of video techniques to monitor diversity, abundance and size of fish in studies of marine protected areas. Aquatic protected areas- What works best and how do we know. Beumer, J. P., Grant, A., Smith, D. C. , Proc. World Congr. on Aquat Protected Areas. Australian Soc. for Fish Bio. North Beach, Western Australia. 455-464 (2003).
- McLean, D. L., Green, M., Harvey, E. S., Williams, A., Daley, R., Graham, K. J. Comparison of baited longlines and baited underwater cameras for assessing the composition of continental slope deepwater fish assemblages off southeast Australia. Deep-Sea Research Part I: Oceanographic Research Papers. 98, 10-20 (2015).
- Parker, D., Winker, H., et al. Insights from baited video sampling of temperate reef fishes: How biased are angling surveys. Fish. Res. 179, 191-201 (2016).
- Boutros, N., Shortis, M. R., Harvey, E. S. A comparison of calibration methods and system configurations of underwater stereo-video systems for applications in marine ecology. Limnol. Oceanogr. Methodss. 13 (5), 224-236 (2015).
- Harvey, E. S., Cappo, M., Butler, J. J., Hall, N., Kendrick, G. A. Bait attraction affects the performance of remote underwater video stations in assessment of demersal fish community structure. Mar. Ecol. Prog. Ser. 350, 245-254 (2007).
- Watson, J. L., Huntington, B. E. Assessing the performance of a cost-effective video lander for estimating relative abundance and diversity of nearshore fish assemblages. J. Exp. Mar. Bio. Ecol. 483, 104-111 (2016).
- Easton, R. R., Heppell, S. S., Hannah, R. W. Quantification of Habitat and Community Relationships among Nearshore Temperate Fishes Through Analysis of Drop Camera Video. Mar. Coast. Fish. 7 (1), 87-102 (2015).
- Hannah, R. W., Blume, M. T. O. Tests of an experimental unbaited video lander as a marine fish survey tool for high-relief deepwater rocky reefs. J. Exp. Mar. Bio. Ecol. 430, 1-9 (2012).
- Starr, R. M., Gleason, M. G., et al. Targeting Abundant Fish Stocks while Avoiding Overfished Species: Video and Fishing Surveys to Inform Management after Long-Term Fishery Closures. Plos One. 11 (12), 0168645 (2016).
- Love, M. S. Certainly more than you want to know about the fishes of the Pacific Coast: a postmodern experience. , Really Big Press. Santa Barbara, CA. (2011).
- Campbell, M. D., Pollack, A. G., Gledhill, C. T., Switzer, T. S., DeVries, D. A. Comparison of relative abundance indices calculated from two methods of generating video count data. Fish. Res. 170, 125-133 (2015).
- Cappo, M., Speare, P., De'ath, G. Comparison of baited remote underwater video stations (BRUVS) and prawn (shrimp) trawls for assessments of fish biodiversity in inter-reefal areas of the Great Barrier Reef Marine Park. J. Exp. Mar. Bio. Ecol. 302 (2), 123-152 (2004).
- Schobernd, Z. H., Bacheler, N. M., Conn, P. B., Trenkel, V. Examining the utility of alternative video monitoring metrics for indexing reef fish abundance. Can. Jour. Fish. Aquat. Sci. 71 (3), 464-471 (2014).
- Hansen, M. J., Schorfhaar, R. G., Selgeby, J. H. Gill-Net Saturation by Lake Trout in Michigan Waters of Lake Superior. North Am. J. Fish. Manag. 18 (4), 847-853 (1998).
- Dauk, P. C., Schwarz, C. J. Catch estimation in the presence of declining catch rate due to gear saturation. Biometrics. 57 (1), 287-293 (2001).
- Hilborn, R., Walters, C. J. Quantitative Fisheries Stock Assessment Choice, Dynamics and uncertainty. , Springer. Dordrecht. (1992).
- Erisman, B. E., Allen, L. G., Claisse, J. T., Pondella, D. J., Miller, E. F., Murray, J. H. The illusion of plenty: hyperstability masks collapses in two recreational fisheries that target fish spawning aggregations. Can. Jour. Fish. Aquat. Sci. 68, 1705-1716 (2011).
- Buckland, S. T., Anderson, D. R., Burnham, K. P., Laake, J. L. Distance Sampling: Estimating abundance of biological populations. , Chapman and Hill. London. (1993).
- Ronconi, R. A., Burger, A. E. Estimating seabird densities from vessel transects: Distance sampling and implications for strip transects. Aquat. Bio. 4 (3), 297-309 (2008).
- Caselle, J. E., Rassweiler, A., Hamilton, S. L., Warner, R. R. Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected areas Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected. Nat. Publ. Gr. , 1-14 (2015).
- Starr, R. M., Wendt, D. E., et al. Variation in Responses of Fishes across Multiple Reserves within a Network of Marine Protected Areas in Temperate Waters. Plos One. 10 (3), 0118502 (2015).
- Lester, S., Halpern, B., et al. Biological effects within no-take marine reserves: a global synthesis. Mar. Ecol. Prog. Ser. 384, 33-46 (2009).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}