

Summary
Nós descrevemos um método novo para contagem de peixes e estimar a abundância relativa (MaxN) e a densidade de peixes usando sistemas de câmera de vídeo estéreo de giro. Também demonstramos como usar distância da câmera (distância Z) para estimar a detectabilidade espécie-específicas.
Abstract
A utilização de sistemas de câmera de vídeo em estudos ecológicos de peixe continua a ganhar força como um método de medição de comprimentos de peixe e abundância de peixes estimando viável, não-extrativistas. Nós desenvolveu e implementou uma ferramenta rotativa de stereo video câmera que cobre 360 graus de amostragem, que maximiza o esforço amostral em comparação com ferramentas de câmera fixa. Uma variedade de estudos detalharam a capacidade dos sistemas estáticos, câmera estéreo para obter medições de alta precisa e precisas de peixe; o foco aqui foi sobre o desenvolvimento de abordagens metodológicas para quantificar a densidade de peixes usando sistemas de câmera rotativas. A primeira abordagem foi desenvolver uma modificação da métrica MaxN, que normalmente é uma conservador contagem do número mínimo de peixes observado na pesquisa determinada câmera. Nós redefinimos MaxN para ser o número máximo de peixe observada em qualquer determinada rotação do sistema de câmera. Quando são tomadas precauções para evitar a dupla contagem, este método para MaxN pode refletir mais precisamente verdadeira abundância do que o obtido a partir de uma câmera fixa. Em segundo lugar, porque estéreo-vídeo permite que o peixe deve ser mapeada no espaço tridimensional, estimativas precisas da distância-de-câmara podem ser obtidas para cada peixe. Usando o percentil de 95% da distância observada da câmera para estabelecer áreas específicas pesquisadas, explicar as diferenças na capacidade de detecção entre espécies, evitando a diluição estimativas de densidade, usando a distância máxima que uma espécie foi observada. Contabilidade para esta gama de detectabilidade é fundamental para estimar com precisão as abundâncias de peixe. Esta metodologia facilitará a integração dos instrumentos stereo-video em ciência aplicada e contextos de gestão rotativos.
Introduction
Ao longo da costa do Pacífico dos Estados Unidos, muitas das espécies importantes para a pesca comercial e recreativa capturas (por exemplo, o complexo de bodião (Sebastes spp.) e Lingcod (Ophiodon elongatus)) estão fortemente associadas com habitats de alto-relevo, parte inferior dura1,2,3,4,5. Câmeras estéreo-video gota são uma ferramenta não-extrativistas atraente para usar em habitats rochosos devido à relativa facilidade e simplicidade de operação. Uma variedade de sistemas de câmaras de vídeo estéreo foram desenvolvidos e implantados no hemisfério sul, águas rasas ecossistemas6,7,8,9,10, e recentemente, gota-câmeras de vídeo ganharam tração como uma ferramenta de gerenciamento para ambientes de rochoso-corais de águas profundas ao longo da costa do Pacífico11,12,13. Nós procuramos modificar estes projetos existentes de câmera estéreo usando um sistema de câmera de vídeo estéreo (doravante referido como "Lander") para caracterizar mais eficientemente as populações de peixes em alto-relevo seafloors ao longo da costa do Pacífico central (ver tabela de de Materiais). O módulo usado foi diferente do que os sistemas de vídeo existentes porque câmeras foram montadas para uma barra central rotativa, que permitiram uma completa 360° de cobertura do fundo do mar a gota local14. O Lander completou uma rotação completa por minuto, o que nos permitiu rapidamente caracterizam a abundância e a composição da comunidade de uma área e alcançar o mesmo nível de poder estatístico com menos implantações de Lander. (Ver Starr (2016)14 para maiores detalhes sobre os detalhes da configuração do módulo de pouso). Testes preliminares no sistema de estudo sugeriram que oito rotações das câmeras em nossas pesquisas foram suficientes para caracterizar a riqueza e abundância de espécies. Essa determinação foi feita por uma observação de retornos decrescentes na abundância de espécies e densidade de peixe por mais gotas. Recomendamos que um estudo piloto, incluindo tempos de imersão mais ser realizado em qualquer novo sistema para determinar o tempo de imersão ideal para uma espécie de determinado ecossistema/estudo.
Usando câmeras estéreo emparelhadas, ambos pesquisa área total e densidade absoluta de peixe pode ser calculada para cada vídeo pesquisa; no entanto, o uso de câmeras de giro exigiu a modificação de peixe tradicional contagem de métricas. Sistemas de vídeo fixos mais frequentemente usarem "MaxN" como um conservador Conde de peixes em uma implantação de6,10. MaxN tradicional descreve o número máximo de peixe de uma dada espécie observada juntos em um único quadro de vídeo, para evitar a dupla contagem um peixe que deixou e voltou para o quadro. MaxN foi, portanto, uma estimativa do número mínimo de peixes conhecidos para estar presente e pode subestimar o verdadeiro peixe abundância6,10. A métrica MaxN foi redefinida para representar o maior número de peixes que vi em cada rotação completa das câmeras.
A segunda modificação para métodos anteriores de vídeo estéreo foi a conta para o fato de que espécies de vários tamanhos, cores, e formas têm diferentes distâncias máximos de identificação fiável. Por exemplo, grandes espécies como o. elongatus tem uma distinta forma alongada e confiável podem ser identificados a distâncias muito maiores em comparação com espécies pequenas e enigmáticas como a Squarespot Rockfish (Sebastes hopkinsi). Estes diferentes intervalos máximos de detectabilidade alterar a área eficaz pelo módulo para cada espécie. Porque as câmeras estéreo permitem-nos colocar todos os peixes no espaço tridimensional com um alto grau de precisão, um pode determinar a distância entre as câmeras que cada peixe foi medido (ou seja, a distância de"Z", nomeado para o "z", que é perpendicular à linha reta traçada entre as câmeras). Para cada espécie, a distância em que 95% de todos os indivíduos foram observados (doravante, "distância 95% Z") era considerada o raio da área de pesquisa e foi usada para calcular a área total de pesquisados. Além de características específicas, identificabilidade será afetada por condições ambientais, tais como a turbidez da água. Porque esses fatores podem variar no tempo e no espaço, é importante usar a estatística de 95% Z apenas no agregado. Enquanto será altamente preciso para amostras grandes, qualquer um inquérito individual pode variar em área pesquisada.
O protocolo detalhado abaixo fornece orientação sobre como criar e usar essas métricas. Embora o foco era caracterizar águas profundas habitat rochoso ao longo da costa do Pacífico, a metodologia descrita por modificados MaxN contagem é prontamente aplicável a qualquer sistema de gota-câmera rotativa. O número de rotações de câmera necessários para caracterizar as populações de peixes dependerá a dinâmica do ecossistema local, mas a conceituação do MaxN modificado permanecerá o mesmo. Da mesma forma, Considerando que costumávamos software fotogramétrico 3D para analisar vídeo estéreo, as técnicas descritas neste documento facilmente são aplicadas através de plataformas de software, como a localização precisa de peixe no espaço tridimensional é possível. Além disso, a abordagem da aplicação de um valor de distância 95% Z pode ser considerada no futuro estudos com estéreo-câmeras para contabilizar gamas específicas de detectabilidade e calcular com mais precisão a abundância de peixe.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
Nota: Imagens dos passos software estão incluídas como Arquivos suplementares. Por favor, note que os passos de software descritos abaixo são específicos para o software escolhido (consulte a Tabela de materiais). A abordagem global pode ser estendida para qualquer plataforma de software estéreo.
1. prepare estéreo-câmera filmagem para análise
Nota: Recomenda-se calibração usando um cubo de calibração. Um cubo de calibração é um frame de alumínio tridimensional com precisamente posicionados pontos reflexivos na superfície. Quando usado em conjunto com software de calibração, um cubo de calibração leva a maior precisão e exatidão que quadriculado abordagens9.
- Calibre as câmeras Lander com software de calibração de aparelhagem (Figura 1 e Figura 2; ver Tabela de materiais para uma recomendação de software).
Nota: A calibração pode ser verificada antes de usar no campo medindo alvos de tamanhos conhecidos em distâncias diferentes (ver vídeo complementar 1). Erro de medição média para uma meta de 50 cm a uma distância de 3 m (ou menos) deve ser dentro de 2% do comprimento do alvo conhecido. Observe também que uma determinada calibração só será válida se não mudar de posições da câmera em relação um ao outro. É fundamental para cuidar e evitar empurrões não intencionais das câmeras, até que toda a amostragem foi realizada. - Colete dados de campo usando o Lander calibrado (Figura 1, complementar vídeo 2).
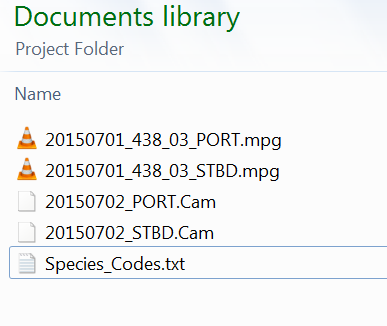
- Após o campo de estudo é completo, crie uma nova pasta de projeto que contém os arquivos de vídeo e calibração.
Nota: Em cada projeto pasta lá precisa mínimo de cinco arquivos: a esquerda e direita ". Arquivos de calibração de Cam", os esquerda e direita vídeo arquivos (. MP4 ou. Formato AVI apenas) e a lista de espécies (formato. txt). - O software de medição estéreo, iniciar um novo projeto de medição e carregue arquivos de vídeo e calibração apropriados.
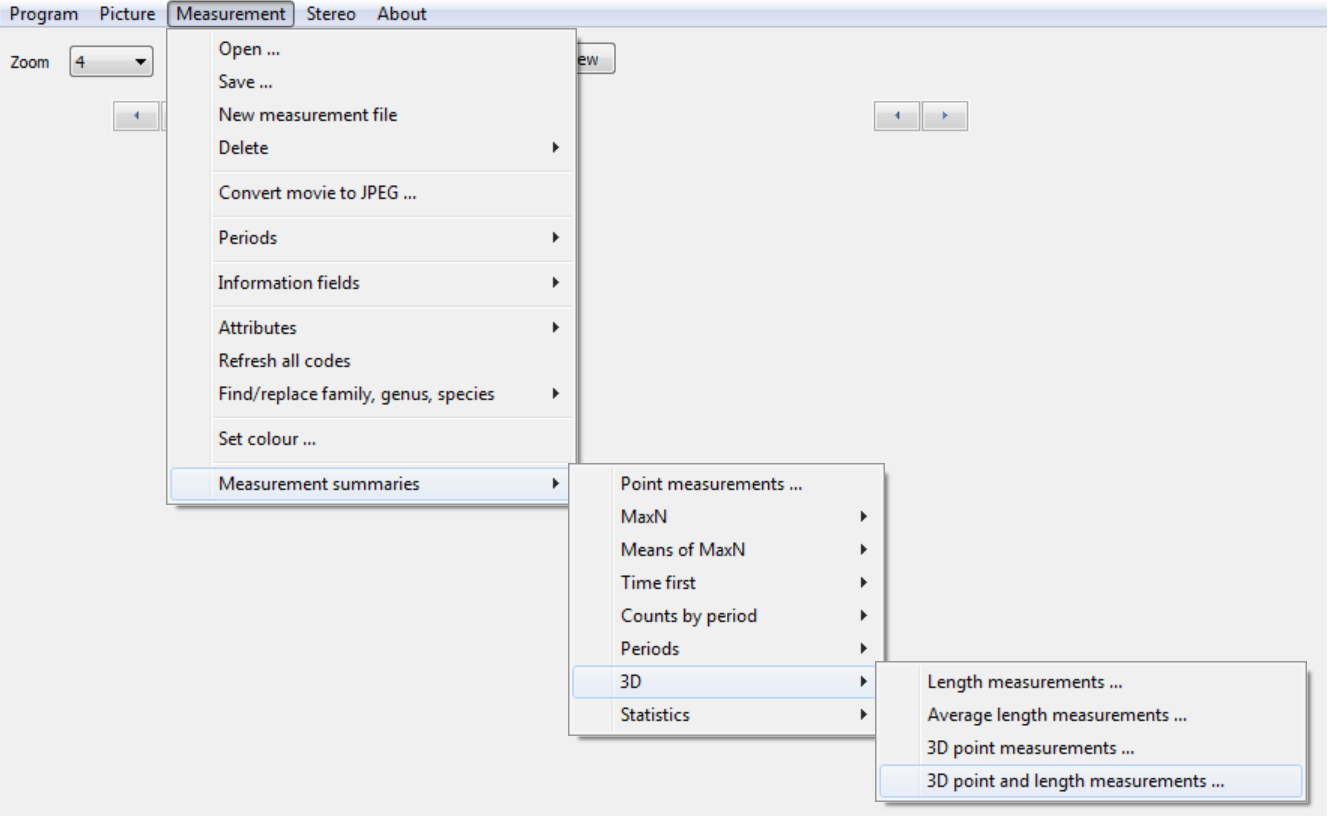
Nota: Screenshots de todos os passos de software estão disponíveis entre os Arquivos complementares.- Navegue até 'Medida' > 'Novo arquivo de medição'.
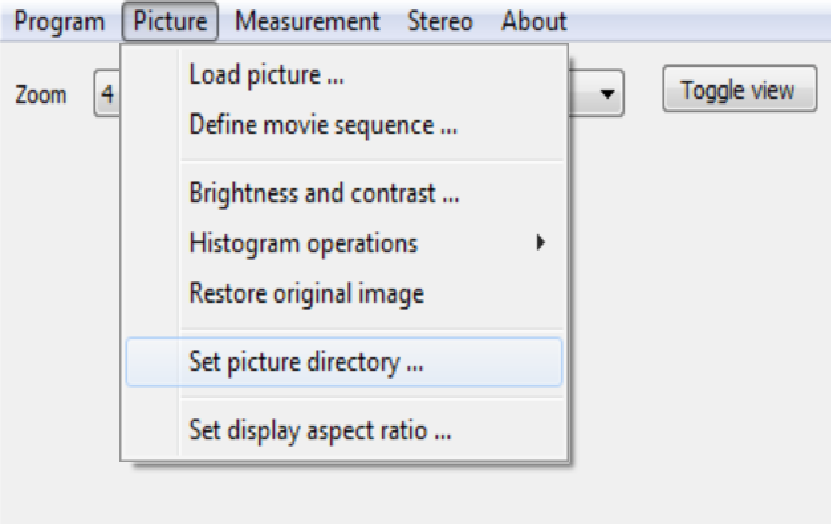
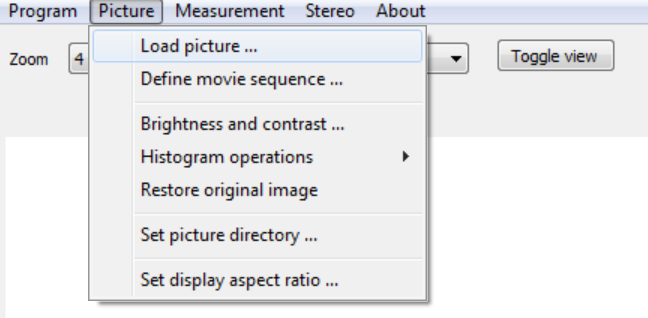
- Definir o diretório de imagens navegando para 'Imagem' > 'diretório de imagens Set' e escolha a pasta que contém todos os arquivos de projeto.
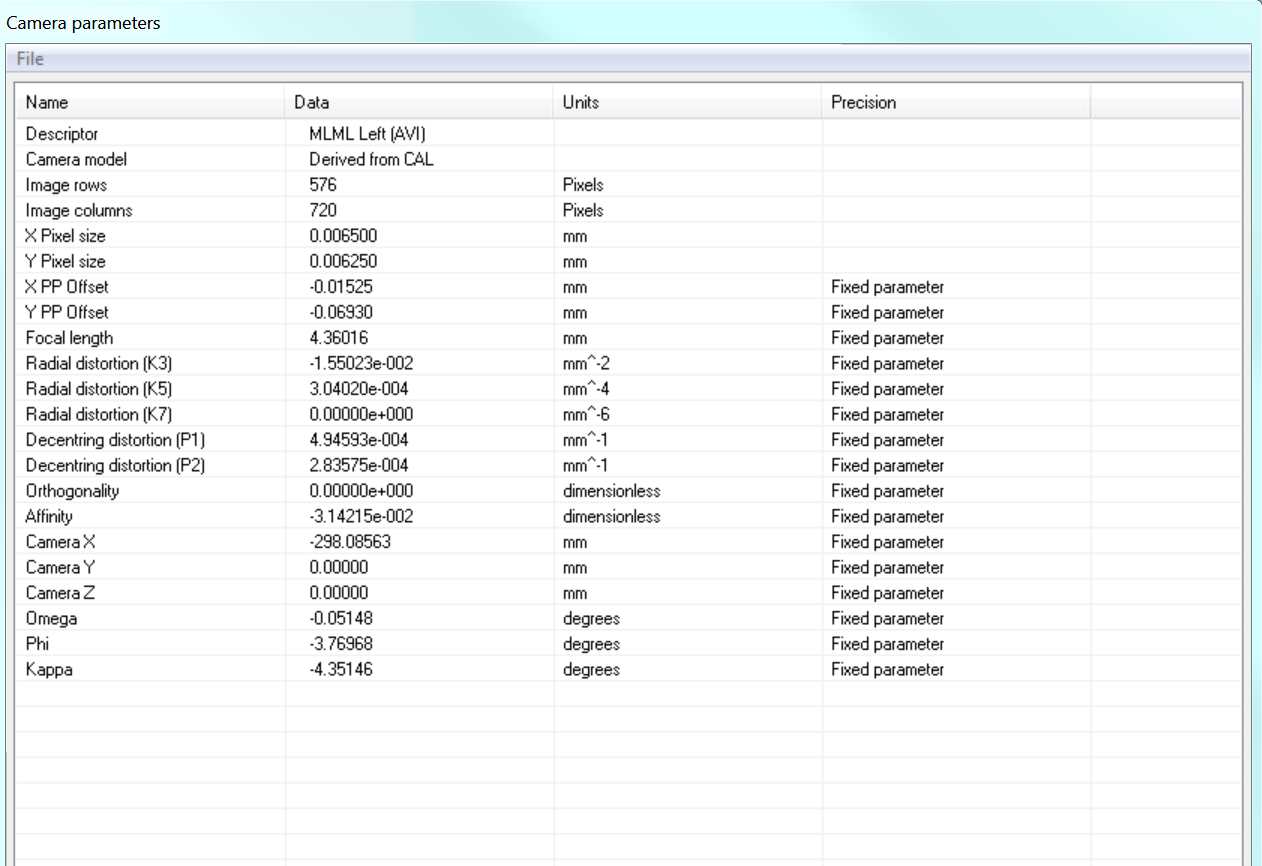
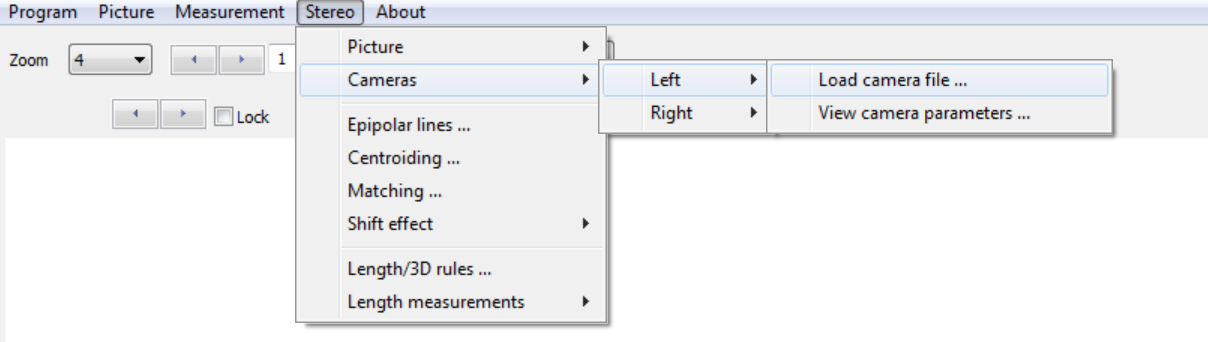
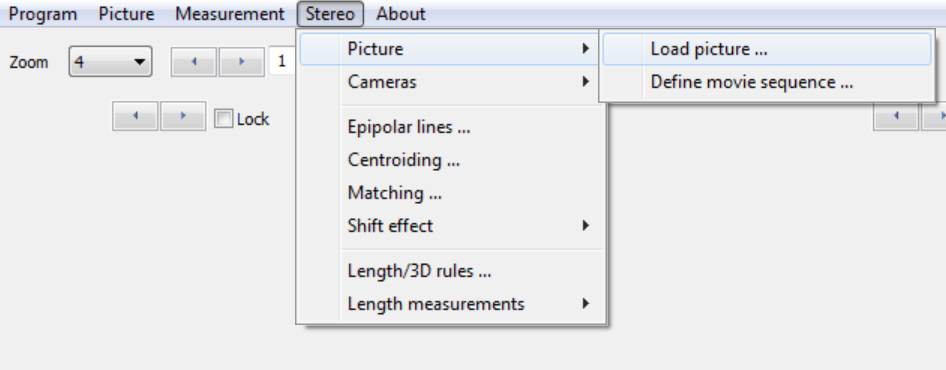
- Carregar a câmera esquerda ". Cam"arquivo navegando para 'Estéreo' > 'Câmeras' > 'Esquerda' > 'Arquivo de câmara de carga' e selecionar o arquivo apropriado.
- Repita a etapa 1.4.3 para carregar a câmera certa ". Arquivo de Cam"
Nota: Esses arquivos contêm as medições de calibração para cada câmera (por exemplo, tamanho do pixel, relação de aspecto, distorção radial, decentring distorção, etc.) e serão usados para medir o peixe e calcular a distância da câmera (ou seja, Z distância). - Definir a sequência de filme para o arquivo de vídeo à esquerda, navegando para a 'Imagens' > 'definir a sequência do filme' e selecionar o arquivo de vídeo de câmera de esquerda.
- Carregar o arquivo de vídeo à esquerda em software de medição, selecionando 'Quadro' > 'imagens de carga'.
Nota: Certifique-se de que a caixa 'Bloquear' está desmarcada antes de carregar arquivos de vídeo. Isso permite que ambos os vídeos sejam carregados simultaneamente. - Definir o filme sequência e carregar arquivo de vídeo para o vídeo certo usando os menus 'Estéreo' > 'imagens' > 'definir a sequência do filme' e 'Estéreo' > 'quadro' > 'imagens de carga'.
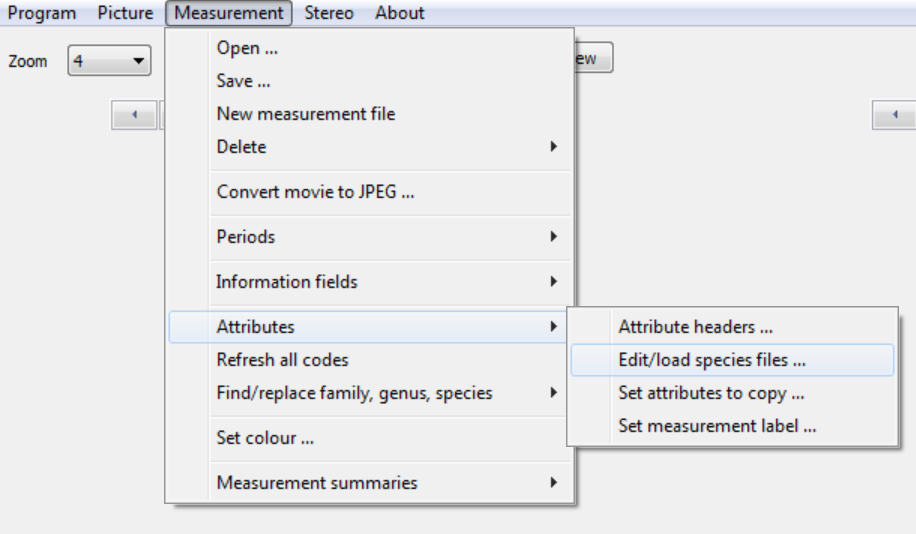
- Carregar a lista de espécies navegando para 'Medida' > 'Atributos' > ' Editar/carregar arquivo de espécie'.
- Insira as informações de ID de pesquisa sob 'Campos de informações' > 'Editar o valor do campo' e salve o arquivo para criar um. Projeto de EMObs.
- Sincronize os vídeos usando o flash de luz, aplauso, carimbo de tempo Universal Coordenado (UTC) ou qualquer evento específico de tempo que ocorre em ambos os vídeos.
- Se usando o carimbo de hora UTC, quadro-passo em frente no vídeo à esquerda até o carimbo de hora começa um novo segundo. Ocorre outra armação para a frente até que piscam ou aplauso.
- Quadro-passo o vídeo certo para a frente até o carimbo de hora exatamente corresponde o vídeo à esquerda. Quadro mais um passo à frente até o exato momento a luz do flash ou aplauso corresponde o vídeo à esquerda.
Nota: É importante que os vídeos ser sincronizada para o mesmo quadro. Sincronização de vídeo deve ser verificada periodicamente usando o carimbo de tempo de vídeo para evitar a deriva de quadro câmera durante a análise. Umas palmas de mão filmado também podem ser usada no início e no final do vídeo para testar esse direito e esquerdos vídeos foram sincronizados para o mesmo quadro.
- Clique no botão "Bloquear" para garantir vídeos jogam juntos e mantêm a sincronização.
2. gerar a contagem de pontos e calcular MaxN
Nota: Cada peixe inicialmente é marcado com um ponto 2D para o mais baixo possível resolução taxonômica. Peixe com identificação incerta deve ser marcado para revisão posterior.
- Espere para começar a contar o peixe até o final de uma rotação completa da câmera para garantir que o 360 graus é usado. Também esperar até sedimentos se dissipou (geralmente < 1-2 min após o contato com a parte inferior).
- Assim como a Lander começa sua primeira rotação, botão direito do mouse para definir um novo período de amostragem: 'Definições de período' > 'Adicionar novo início período'. Digite o nome do primeiro período como "01" e clique em "Okey".
- Enquanto a Lander gira, começa a marcar cada peixe que entra em quadro, com um ponto 2D usando a câmera esquerda somente.
- Para adicionar um ponto 2D, botão direito, selecione 'Adicionar ponto' e escolha o nome da espécie correta. Etiqueta para o nível mais baixo possível taxonômico, selecionando 'spp.' para espécies desconhecidas e clique em "Okey".
- Continue a marcar cada peixe novo segundo passo 2.2.1 até a conclusão da rotação.
- Repita o protocolo procedimentos 2.1-2.2 para cada rotação adicional de Lander - garantindo que um novo período é definido no início de cada rotação de câmera.
Nota: As curvas de acumulação de espécies foram usadas para determinar que oito rotações eram, em média, suficientes para caracterizar a abundância de peixes no presente estudo. Pesquisadores devem considerar a realização de testes preliminares com rotações de câmera adicional, por tempos mais longos de molho, para caracterizar o número ideal de rotações de câmera dentro de um determinado ecossistema. - Calcule acusações específicas de indivíduos observados por rotação de câmera.
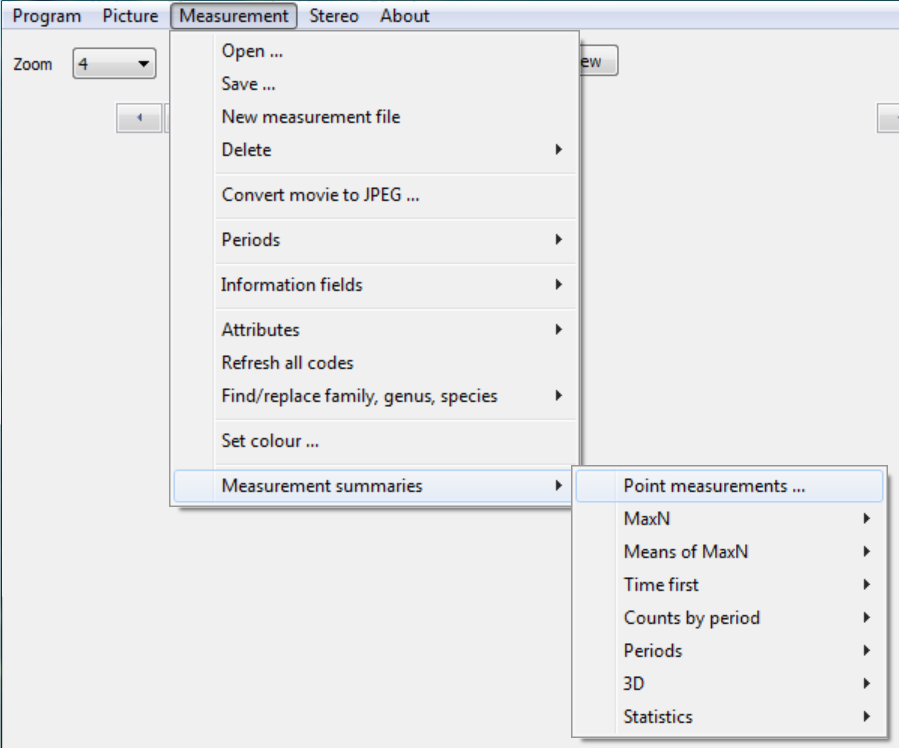
- Depois de tem sido enumeradas todas as rotações, exportar pontos 2D navegando para 'Medida' > 'Resumos de medição' > 'Apontar medidas' e salvar pontos 2D como arquivo a. txt.
- Abra o arquivo de ponto de 2D.txt salvo como uma planilha e crie uma tabela dinâmica de espécies vs número de rotação para resumir contagens (tabela 1) navegando para 'Inserir' > 'Tabela dinâmica'. Selecione "Gênero e espécie" para 'Rótulo de linha' e "Período" para 'Rótulo da coluna'.
- Escolha o MaxN para cada espécie, selecionando a rotação da câmera que tem o maior número de indivíduos dessa espécie (tabela 1).
- Para peixes, identificados apenas como gênero, selecione um nível de género MaxN baseado na rotação que teve o maior número de indivíduos identificados para a espécie no género específico.
Nota: Este passo ajuda a evitar a dupla contagem individual peixe que só eram identificáveis de grupos taxonômicos superiores (por exemplo, apenas ao género ou família). Por exemplo, na tabela 1, ' rotação 1' contidos não identificado 10 Sebastes spp e 33 membros do gênero Sebastes identificada a espécie, Considerando que ' rotação 3' continha apenas dois não identificados Sebastes spp e 43 membros da o género Sebastes identificada a espécie. Por conseguinte, ' rotação 3' seria usada para contagem de MaxN de desconhecido Sebastes spp.. Desta forma, a conservadora suposição é feita que 8 do Sebastes spp. não identificado em ' rotação 1' foram identificados em ' rotação 8'. - Se múltiplas rotações têm a mesma contagem de MaxN para uma dada espécie, escolha a primeira rotação com MaxN para medições ponto 3D.
- Para cada espécie, tirar medidas 3D de peixe na rotação que MaxN ocorreu.
- Use os pontos 2D salvos, coletados em passos 2.1-2.3 para navegar para o exato mesmo peixe para medição 3D.
- Zoom em pelo menos 4 X para identificar melhor a ponta do focinho de peixe e as bordas das barbatanas caudais (Figura 3).
Nota: Pode ser necessário para a etapa de quadro para a frente ou para trás para encontrar a melhor orientação dos peixes para a medição 3D. A 'melhor' orientação é um onde o focinho e extremidades das barbatanas caudais são visíveis em ambas as câmaras. - Manualmente, clique na ponta do focinho, então a ponta da cauda na câmara esquerda, em seguida, repita a seleção na mesma ordem no vídeo direito.
- Selecione a identificação correta da espécie de menus dropdown como foi feito na 2.2.1.
- Se uma medida de comprimento 3D não é possível, para instância se a cabeça e a cauda do peixe não são visíveis em ambas as câmaras, então marca um ponto 3D em vez disso deixou clicando a mesma posição do peixe em ambos os vídeos, esquerdas e direita. Preencha os campos de informações como antes e deixar o comentário "Excluir da medida do comprimento".
Nota: MaxN pode ocorrer em diferentes rotações das câmeras para diferentes espécies; no entanto, para qualquer determinada espécie, medições devem ocorrer em um turno só (tabela 1).
- Depois de concluir as medições 3D para todos os peixes, exporte arquivo de as.txt de dados para posterior análise.
- Navegue até 'Medida' > 'Resumos de medição' > 'medições de ponto e comprimento 3D' e save.txt arquivo de exportação.
3. procedimento de distância 95% Z para áreas específicas de pesquisa
Nota: A distância de 95%, Z é uma estimativa da distância média que uma espécie confiável pode ser identificada em um determinado estudo excluindo casos de condições excepcionais de água clareza ou iluminação. Este cálculo leva em conta as condições oceanográficas médias para um determinado estudo e terá de ser re-calculado para cada novo estudo.
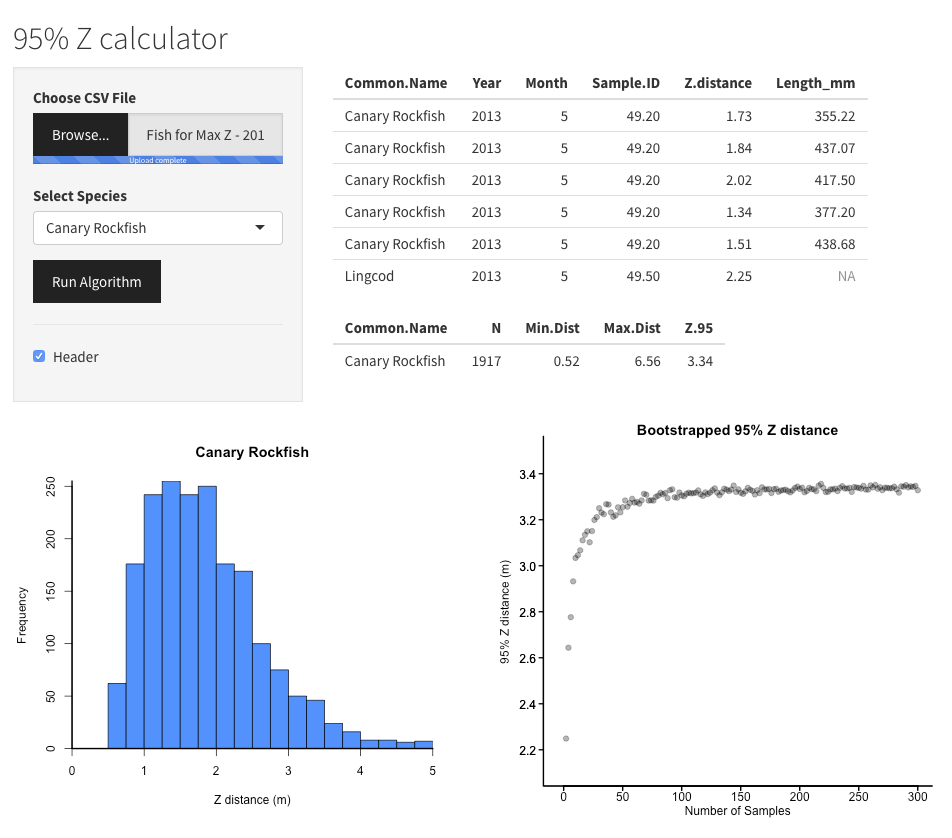
- Use uma inicialização simples para determinar se o tamanho da amostra é grande o suficiente para caracterizar a distância de detecção confiável para cada espécie.
- Para cada classe de tamanho de amostra (por exemplo, caixas de tamanho de amostra de 5 peixes), 1.000 aleatório retira a população de amostra do tamanho da amostra seleccionada com substituição calcular a média de 95% Quantil de distâncias desses 1.000 desenha e plotar o resultante curva assintótica. Consulte o código fornecido no Supplemental arquivos 1 & 2.
- Verificar que as amostras adequadas foram obtidas, comparando o tamanho de amostra real com a assíntota 95% Z distância com o aumento do tamanho da amostra.
- Calcule o valor da distância de 95% Z como o Quantil de 95% da distância da câmera medida para uma espécie através de todas as pesquisas.
- Calcule a área eficaz pesquisada para cada espécie usando o valor de 95%, Z.
Nota: No caso de uma sonda rotativa, o valor de 95% Z representa o raio exterior de uma faixa pesquisado, com o raio interno determinado pela instalação física da ferramenta e como fechar para a base das câmeras é capaz de observar. Como o módulo gira, uma área de pesquisa 'donut' em forma de é formada (Figura 4).- Calcule área pesquisada como:

Nota: por exemplo, uma espécie relativamente grande como Yelloweye Rockfish (Sebastes ruberrimus) tinha uma distância de 95% Z de 3,3 m e uma área de pesquisa eficaz de 30,9 m2 por implantação Lander: 34,3 m2 (círculo externo) - 3,4 m2 (interior círculo) = 30,9 m2 (área total de pesquisa).
- Calcule área pesquisada como:
- Usando a área calculada pesquisados contagens de espécies individuais (etapa 3.3.1), converter (MaxN) em estimativas de densidade para cada levantamento visual usando a equação:

Nota: Um procedimento similar pode ser usado para calcular uma densidade volumétrica, ao invés de uma densidade; no entanto, esse processo não é descrito aqui.



Tabela 1: tabela de Resumo de exemplo MaxN. A seleção de MaxN para cada espécie é demonstrada com texto em negrito e vermelho. Observe que um conservador MaxN para não identificada Sebastes spp foi determinada pela rotação com a maioria dos Sebastes identificada a espécie (rotação 3). Também, enquanto este estudo utilizou oito rotações de câmera, apenas quatro rotações são exibidas na tabela 1 para a simplicidade. O processo para selecionar MaxN é idêntico independentemente do número de rotações.

Figura 1: Lander vídeo estéreo. Chave hardware é numerada (1) umbilical, 300 m (2) dois gravadores de vídeo digital (DVR) com removível cartões de armazenamento de 32 GB para dentro do frasco impermeável, dois LED (3) luzes saídos 3.000 lúmens a uma temperatura de cor de 5.000 K e (4). duas câmeras com resolução 620 de TV da linha (TVL). Clique aqui para ver uma versão maior desta figura.

Figura 2: cubo de calibração (500 x 500 x 300 mm). Exemplo de uma calibração com um 'cubo de calibração' mostrado em duas orientações diferentes: (A) do lado direito do cubo é empurrado para fora para as câmeras, e (B) a face do cubo é paralela à face das câmeras. Pontos vermelhos indicam os pontos de referência utilizados neste método de calibração específica e devem ser sempre identificados na ordem numerada. Clique aqui para ver uma versão maior desta figura.

Figura 3: medição 3D colocados no Sebastes miniatus. A ponta do focinho e ponta da cauda foram identificados em cada quadro da câmara para permitir a medição estéreo. Clique aqui para ver uma versão maior desta figura.

Figura 4: área pesquisada pela ferramenta de Lander. Área eficaz pesquisada pela ferramenta Lander foi delimitada pelo mínimo distância Z e a distância de 95%, Z para cada espécie. Observe que esta área criado um volume de pesquisa 'donut' dado forma em torno da Lander. Clique aqui para ver uma versão maior desta figura.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Entre 2013 e 2014, realizamos 816 inquéritos com o módulo estéreo-video rotativo (Figura 1) ao longo da costa central da Califórnia e MaxN e 95% Z distância (Figura 4) dados coletados em mais de 20 espécies. Havia claros padrões na faixa detectável eficaz das espécies observadas, provavelmente devido a interação de espécies tamanho, forma e coloração (Figura 5). Por exemplo, o sinalizador Rockfish (Sebastes rubrivinctus) tem faixas distintas em seus lados, permitindo a identificação confiante em distâncias maiores do que outras espécies de tamanho comparável. Da mesma forma, Bodião canário (Sebastes pinniger) são relativamente grande de corpo, mas tem uma pigmentação que é semelhante a outras espécies, tornando assim mais difícil identificar a distância (Figura 5).
Nós usamos duas espécies para demonstrar os cálculos dos valores de distância 95% Z e MaxN: pigmeu Rockfish (Sebastes wilsoni) e Lingcod (o. elongatus). O primeiro é um peixe pequeno-corpóreos que pode ser difíceis de identificar à distância; Considerando que o. elongatus é relativamente grande, tem uma forma distinta e é mais facilmente identificável. Em 2013-2014, 1.191 medições para S. wilsoni e 1.222 medições para o. elongatus foram coletadas. Em seguida, o quantiles de 95% das distâncias em que estas espécies foram observadas: as distâncias de 95% Z foram 2,65 m para s. wilsoni e 3,96 m para o. elongatus (Figura 5) foram calculados. Estas distâncias 95% Z traduzem em áreas de pesquisa eficaz de 18,6 m2 e 46,0 m2 para S. wilsoni e o. elongatus, respectivamente. Uma simples análise de auto-inicialização confirmou essa amostra suficiente tamanhos foram obtidos para a caracterização dos valores de distância Z 95%. Para ambas as espécies, a estimativa da distância de 95% Z estabilizada quando maior que 50 inquéritos contendo estas espécies foram amostrados, fornecendo a evidência forte que os tamanhos de amostra escolhido eram mais do que adequado para caracterizar a área de amostra de Lander eficaz para estes espécie (Figura 6).
MaxN contagens por levantamento foram então convertidas em densidades (número de peixes/m2). Usamos as estimativas de densidade de 816 inquéritos para testar a hipótese de que Lingcod e pigmeu Rockfish seriam observadas principalmente sobre os habitats de alto relevo. Para ambas as espécies, foram significativamente maiores densidades sobre alívio de média e alto em comparação com baixo relevo habitats (Kruskal-Wallis, p <<. 001; A Figura 7). Esses resultados foram consistentes com associações de habitat relatado anteriormente para ambas as espécies,15. Não havia diferenças entre médio e alto relevo habitat de qualquer espécie.
Para entender como a Lander rotativa em comparação com sistemas de câmera fixa tradicional, estimamos as diferenças na densidade e variabilidade estima entre uma rotação e um simulado Lander estacionária. Nós assumimos que uma Lander de câmara única estacionária típico teria um campo de visão de 90 graus. O módulo de rotação tem um campo de visão de 60 graus e requer 5 segundos de rotação completar uma visão de 90 graus. Usando 261 inquéritos, selecionamos dados de observação de peixes dos médios 5 segundos de rotações Lander estabelecer MaxN. Estimativas de densidade para a pseudo fixa Lander foram padronizados usando as reduzidas áreas de cobertura (ou seja, aproximadamente ¼ da área do rotativo Lander). Diferenças de densidade média e coeficiente de variação entre sondas rotativas e estacionárias pseudo foram avaliadas com teste-t de Welch. Densidades obtidas pela câmera rotativa eram 18% maior do que as obtidas com câmaras fixas (t21.7 Welch, p = 0,081, Figura 8A). Além disso, o coeficiente de variação foi 1,8 vezes maior com a câmera fixa, em comparação com câmeras de giro (t15.1 Welch, p < 0,001, Figura 8).

Figura 5 : Z distâncias observaram para espécies selecionadas. Barras verticais vermelhas indicam a distância mínima de Z (0,81 m de câmeras) à esquerda e o valor de distância Z 95% à direita. Note que isto representa a área de pesquisa eficaz média em torno da Lander para cada espécie. Clique aqui para ver uma versão maior desta figura.

Figura 6 : Bootstrapped valores de distância Z. Inicialização para aumentar o tamanho da amostra para observações do . elongatus (A) S. wilsoni e (B). Tamanhos de amostra, variando de 3-300 foram bootstrapped 1.000 vezes cada para calcular a distância média de 95% Z e verificar que os tamanhos de amostra eram adequados. Observe que os valores do eixo y variam de 2.0-2,6 m para S. wilsoni e de 2,6-4,0 m para o. elongatus. Clique aqui para ver uma versão maior desta figura.

Figura 7 : Diferenças de habitat para espécies selecionadas duas. Densidade média (± SE) do (A) S. wilsoni e (B) o. elongatus medido no habitat de pedra de baixo, médio e alto relevo. Clique aqui para ver uma versão maior desta figura.

Figura 8 : Diferenças entre sondas rotativas e estacionárias pseudo. Ambas as estimativas de (A) significa densidade (± SE de peixes/m2 ) e (B) média coeficiente de variação (CV) ± SE para 261 inquéritos são apresentados. Clique aqui para ver uma versão maior desta figura.

Complementar Video 1: verificação da calibração. Calibração pode ser verificada antes de usar no campo, medindo alvos de tamanhos conhecidos em diferentes distâncias. Por favor clique aqui para ver este vídeo. (Botão direito do mouse para fazer o download.)

Vídeo complementar 2: filmagem subaquática Survey. Por favor clique aqui para ver este vídeo. (Botão direito do mouse para fazer o download.)
Subscription Required. Please recommend JoVE to your librarian.
Discussion
A métrica MaxN tradicional baseia-se na ideia de contar com um número mínimo garantido de indivíduos presentes durante o estudo. Se um determinado número de peixes é visível simultaneamente em um único quadro de vídeo, não pode haver qualquer menos presente, mas porque os peixes são móveis e forma heterogénea distribuído, a probabilidade de ver todos os indivíduos simultaneamente durante um único quadro do vídeo é baixa . Portanto, é provável que MaxN tradicional subestima a abundância de peixe verdadeiro16,17. Além disso, foi demonstrado que MaxN tradicional pode exibir relacionamentos não-linear polarizados negativamente, com crescente peixe abundâncias16,18. Isto pode estar relacionado com o fenômeno da saturação de engrenagem, segundo o qual os índices de abundância relativa não conseguem detectar o verdadeiro aumenta em abundância19,20. Por outro lado, a estabilidade aparente de um índice com verdadeiramente declinando a abundância de peixe tem sido denominada 'hyperstability' e, finalmente, pode levar à queda de populações de peixes21,22. Um estudo recente relatou que a instabilidade em MaxN poderia ser atenuada, aumentando o pesquisados campo de visão de16. Nesse estudo, a relação entre MaxN e verdadeira abundância tornou-se cada vez mais linear como o campo de visão se aproximou de 100% (ou seja, 360 graus).
Os resultados da simulação a câmera fixa indicam congruência com estes resultados anteriores e sugerem que o valor de MaxN melhor pode caracterizar a abundância de peixe. Por exemplo, o coeficiente médio estimado de variância foi reduzido entre as estimativas de densidade derivadas a Lander rotativa em comparação com o pseudo estacionário Lander. Isto é provavelmente devido ao fato de que peixes são distribuídas de forma heterogénea, e que câmeras fixas são mais propensos a 'perder' o peixe presente se o Lander enfrenta na direção errada. Sondas rotativas maximizar o esforço amostral por levantamento as 360 graus em torno da ferramenta, e o efeito líquido é reduções de custo de amostragem e a variância e um aumento global no poder estatístico do estudo. Futuros estudos melhor poderiam resolver esse problema testando diretamente uma Lander rotativo com uma Lander estacionária separado em um projeto de pesquisa emparelhados. Da mesma forma, fomos incapazes de teste diretamente para o relacionamento entre MaxN e verdadeira abundância neste estudo, e estudos futuros diretamente podem testar isso usando qualquer simulação ou controlada ambientes, como foi feito na Campbell (2015)16.
Uma crítica possível da abordagem MaxN modificada é a possibilidade de duplas contagem de indivíduos. Porque a Lander fez uma rotação completa por minuto, e as espécies bentónicas de interesse no ecossistema tendem a ser relativamente sedentários e lento, movendo-se na maioria das condições, acreditamos que o risco de dupla contagem era baixo. Além disso, observaram-se casos em que peixe entrar ou sair da área de pesquisa ao longo de oito rotações. Foram tomadas precauções adicionais para evitar a dupla contagem como usando a rotação com o maior número de indivíduos de um determinado género contar espécies não identificadas. Outras métricas têm sido propostas como índices de abundância de peixes, tais como contagem de dizer; no entanto, estas também se mostraram consistentemente subestimar a verdadeira abundância enquanto aumentando a variabilidade entre densidade estima16. MaxN, portanto, é recomendado como uma métrica mais precisa da abundância de peixes. Enquanto nossa métrica MaxN modificada não garante uma estimativa conservadora do número mínimo absoluto de indivíduos, em geral estamos confiantes de que esta abordagem MaxN modificada fornece melhores estimativas de abundância de peixe de verdade, e esse excesso contando peixe é de preocupação relativamente baixa.
Visualização de lado muitos vídeo-transecto inquéritos uso um fixo transecto largura para estimar a densidade para todas as espécies. Da mesma forma, uma abordagem usando sondas stereo-vídeo seria usar um máximo de distância da câmera para calcular ambas as áreas pesquisadas e densidade de peixe. Ambos podem levar a uma subestimativa de espécies que só são confiantemente identificáveis para distâncias menores do que o fixo transecto de estimativas de largura23. A distância a que uma espécie confiável é identificada é causada pela interação de fatores como tamanho, forma, padrão de coloração, comportamento dos peixes, bem como fatores ambientais. O método de distância de 95%, Z é particularmente vantajoso em que representa a interação de todos esses fatores simultaneamente. Por exemplo, o. elongatus foi a espécie que somos capazes de identificar com a maior distância, provavelmente como resultado de sua forma de corpo distintos, grandes, alongados e tendência comportamental para colocar no fundo do mar. Rockfish rosado (Sebastes rosaceus) tinha uma das mais curtas distâncias Z, provavelmente porque, como membro do subgénero Sebastomus , tem vários congêneres que parecem muito semelhantes e são difíceis de distinguir a uma distância maior. Permitindo-se para áreas específicas pesquisadas pelo Lander, sejamos capazes de estimar com mais precisão a abundância de peixe. A abordagem bootstrap para verificação de tamanho de amostra é simples e facilmente implementado em outras pesquisas, e acreditamos que o método de distância 95% Z poderia ser mais adaptado para acomodar a linha transecto de projeto de pesquisa. Distância de 95% Z então representaria uma distância horizontal de detecção confiável para espécies observadas com ferramentas de veículo submersível ou operado remotamente (ROV). No futuro, os pesquisadores podem investigar usando a teoria de amostragem de distância à densidade do modelo em função da capacidade de detecção com distância23,24.
Como há maior utilização das reservas não-levar na pesca de gestão25,26,27, há uma necessidade crescente de técnicas de amostragem não-extrativistas, especialmente em habitats de águas profundas não acessíveis ao mergulhador inquéritos. No entanto, também é necessário que essas técnicas fornecem dados precisos, confiáveis na composição de espécies, abundância e comprimento do peixe. Landers vídeo são uma ferramenta de monitoramento relativamente nova que tem um baixo custo, pode ser operado relativamente pequenos navios de oportunidade e são logisticamente mais simples de operar que ROVs e submersíveis, exigindo pessoal qualificado e menos e menos. Enquanto não discutidos em um desses métodos, Landers câmera estéreo são capazes de medições de comprimento preciso com erro inferior a 2%. Além disso, Landers podem ser rapidamente implantadas em grandes áreas geográficas, aumentando a inferência estatística. Esperamos que o interesse em ferramentas para aumentar como olhar de agências de investigação para apertar os orçamentos e espalhar mais eficientemente o esforço amostral de monitoramento de vídeo. Nossa modificação de MaxN e 95% Z distância deve ser considerada no futuro ecológicos estudos utilizando sondas rotativas de vídeo.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Os autores não têm nada a divulgar
Acknowledgments
Este trabalho foi financiado pela The Nature Conservancy e doadores privados, recursos legado fundo Foundation, Gordon e Betty Moore Foundation, fundo de defesa ambiental, programa de concessão do mar de Califórnia, programa nacional de pesquisa cooperativa de NMFS e um NOAA Saltonstall-Kennedy Grant #13-cabos de aço-008. Marinhas de exploração e pesquisa aplicada (Dirk Rosen, Rick Botman, Andy Lauerman e David Jefferies) desenvolvido, construído e mantido a ferramenta vídeo de Lander. Agradecemos a Jim Seager e SeaGIS™ software para obter suporte técnico. Capitão e pescador comercial Tim Maricich e tripulação a bordo, o F/V Donna Kathleen fornecida apoio na implantação do módulo de pouso de 2012-2015. Obrigado a todos que participaram da coleta de dados de vídeo ou análise (Anne Tagini, Donna Kline, o Tenente Amber Payne, Bryon Downey, Marisa Ponte, Rebecca Miller, Matt Merrifield, Walter Heady, Steve Rienecke, EJ Dick e John Field).
Materials
| Name | Company | Catalog Number | Comments |
| calibration cube | SeaGIS | http://www.seagis.com.au/hardware.html | 1000x1000x500 mm is the preferred dimensions. Other methods of calibration are available. |
| CAL calibration software | SeaGIS | http://www.seagis.com.au/bundle.html | |
| EventMeasure stereo measurement software | SeaGIS | http://www.seagis.com.au/event.html | |
| Statistical software | R Core Team 2017 (v. 3.4.0) | Bootstrapping code can be found: https://github.com/rfields2017/JoVE-Bootstrap-Function | |
| Spreadsheet Software | Microsoft Excel | ||
| 2 waterproof cameras | Deep Sea Power and Light | HD quality preferred | |
| 2 depth rated, waterproof lights | Deep Sea Power and Light : 3000 lumen LED with 5000k color temperature | ||
| DVR recorder | Stack LTD DVR | ||
| standard PC | Windows 10 preferred OS | ||
| rotating Lander platform | Marine Applied Research and Engineering (MARE) |
References
- Love, M. S., Yoklavich, M. M., Thorsteinson, L. K. The Rockfishes of the Northeast Pacific. , University of California Press. Berkley. (2002).
- Laidig, T. E., Watters, D. L., Yoklavich, M. M. Demersal fish and habitat associations from visual surveys on the central California shelf. Estuar. Coast. Shelf Sci. 83 (4), 629-637 (2009).
- Anderson, T. J., Yoklavich, M. M. Multiscale habitat associations of deepwater demersal fishes off central California. Fish. Bull. 105 (2), 168-179 (2007).
- Yoklavich, M. M., Cailliet, G. M., Sullivan, D. E., Lea, R. N., Love, M. S. Habitat associations deep-water rockfishes a submarine canyon an example of a natural refuge. Fish. Bull. 98 (3), 625-641 (2000).
- Status of the Pacific Coast Groundfish Fishery, Stock Assessment and Fishery Evaluation. , Pacific Fishery Management Council. Portland, OR. (2016).
- Cappo, M., Harvey, E., Malcolm, H., Speare, P. Potential of video techniques to monitor diversity, abundance and size of fish in studies of marine protected areas. Aquatic protected areas- What works best and how do we know. Beumer, J. P., Grant, A., Smith, D. C. , Proc. World Congr. on Aquat Protected Areas. Australian Soc. for Fish Bio. North Beach, Western Australia. 455-464 (2003).
- McLean, D. L., Green, M., Harvey, E. S., Williams, A., Daley, R., Graham, K. J. Comparison of baited longlines and baited underwater cameras for assessing the composition of continental slope deepwater fish assemblages off southeast Australia. Deep-Sea Research Part I: Oceanographic Research Papers. 98, 10-20 (2015).
- Parker, D., Winker, H., et al. Insights from baited video sampling of temperate reef fishes: How biased are angling surveys. Fish. Res. 179, 191-201 (2016).
- Boutros, N., Shortis, M. R., Harvey, E. S. A comparison of calibration methods and system configurations of underwater stereo-video systems for applications in marine ecology. Limnol. Oceanogr. Methodss. 13 (5), 224-236 (2015).
- Harvey, E. S., Cappo, M., Butler, J. J., Hall, N., Kendrick, G. A. Bait attraction affects the performance of remote underwater video stations in assessment of demersal fish community structure. Mar. Ecol. Prog. Ser. 350, 245-254 (2007).
- Watson, J. L., Huntington, B. E. Assessing the performance of a cost-effective video lander for estimating relative abundance and diversity of nearshore fish assemblages. J. Exp. Mar. Bio. Ecol. 483, 104-111 (2016).
- Easton, R. R., Heppell, S. S., Hannah, R. W. Quantification of Habitat and Community Relationships among Nearshore Temperate Fishes Through Analysis of Drop Camera Video. Mar. Coast. Fish. 7 (1), 87-102 (2015).
- Hannah, R. W., Blume, M. T. O. Tests of an experimental unbaited video lander as a marine fish survey tool for high-relief deepwater rocky reefs. J. Exp. Mar. Bio. Ecol. 430, 1-9 (2012).
- Starr, R. M., Gleason, M. G., et al. Targeting Abundant Fish Stocks while Avoiding Overfished Species: Video and Fishing Surveys to Inform Management after Long-Term Fishery Closures. Plos One. 11 (12), 0168645 (2016).
- Love, M. S. Certainly more than you want to know about the fishes of the Pacific Coast: a postmodern experience. , Really Big Press. Santa Barbara, CA. (2011).
- Campbell, M. D., Pollack, A. G., Gledhill, C. T., Switzer, T. S., DeVries, D. A. Comparison of relative abundance indices calculated from two methods of generating video count data. Fish. Res. 170, 125-133 (2015).
- Cappo, M., Speare, P., De'ath, G. Comparison of baited remote underwater video stations (BRUVS) and prawn (shrimp) trawls for assessments of fish biodiversity in inter-reefal areas of the Great Barrier Reef Marine Park. J. Exp. Mar. Bio. Ecol. 302 (2), 123-152 (2004).
- Schobernd, Z. H., Bacheler, N. M., Conn, P. B., Trenkel, V. Examining the utility of alternative video monitoring metrics for indexing reef fish abundance. Can. Jour. Fish. Aquat. Sci. 71 (3), 464-471 (2014).
- Hansen, M. J., Schorfhaar, R. G., Selgeby, J. H. Gill-Net Saturation by Lake Trout in Michigan Waters of Lake Superior. North Am. J. Fish. Manag. 18 (4), 847-853 (1998).
- Dauk, P. C., Schwarz, C. J. Catch estimation in the presence of declining catch rate due to gear saturation. Biometrics. 57 (1), 287-293 (2001).
- Hilborn, R., Walters, C. J. Quantitative Fisheries Stock Assessment Choice, Dynamics and uncertainty. , Springer. Dordrecht. (1992).
- Erisman, B. E., Allen, L. G., Claisse, J. T., Pondella, D. J., Miller, E. F., Murray, J. H. The illusion of plenty: hyperstability masks collapses in two recreational fisheries that target fish spawning aggregations. Can. Jour. Fish. Aquat. Sci. 68, 1705-1716 (2011).
- Buckland, S. T., Anderson, D. R., Burnham, K. P., Laake, J. L. Distance Sampling: Estimating abundance of biological populations. , Chapman and Hill. London. (1993).
- Ronconi, R. A., Burger, A. E. Estimating seabird densities from vessel transects: Distance sampling and implications for strip transects. Aquat. Bio. 4 (3), 297-309 (2008).
- Caselle, J. E., Rassweiler, A., Hamilton, S. L., Warner, R. R. Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected areas Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected. Nat. Publ. Gr. , 1-14 (2015).
- Starr, R. M., Wendt, D. E., et al. Variation in Responses of Fishes across Multiple Reserves within a Network of Marine Protected Areas in Temperate Waters. Plos One. 10 (3), 0118502 (2015).
- Lester, S., Halpern, B., et al. Biological effects within no-take marine reserves: a global synthesis. Mar. Ecol. Prog. Ser. 384, 33-46 (2009).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}