

Summary
Describimos un nuevo método para el conteo de peces y estimación de abundancia relativa (MaxN) y la densidad de peces utilizando sistemas de estéreo y vídeo cámara de rotación. También se demuestra cómo utilizar distancia desde la cámara (distancia Z) para estimar la capacidad de detección específicos.
Abstract
El uso de sistemas de cámaras de video en estudios ecológicos de peces continúa ganar la tracción como un método viable y no extractivo de medición longitudes de peces y estimar la abundancia de peces. Desarrolló e implementó una herramienta de cámara de vídeo estéreo giratoria que cubre 360 grados de toma de muestras, que maximiza el esfuerzo de muestreo en comparación con las herramientas de cámara estacionarios. Una variedad de estudios han detallado la capacidad de los sistemas estáticos, equipo de música de cámara para obtener mediciones altamente exactas y precisas de los peces; el objetivo aquí era en el desarrollo de enfoques metodológicos para cuantificar la densidad de peces utilizando sistemas de cámara giratoria. El primer enfoque fue desarrollar una modificación de la métrica MaxN, que normalmente es una cuenta conservadora del número mínimo de peces observada en una encuesta de la cámara. Redefinimos MaxN para ser el número máximo de peces observada en cualquier rotación dado el sistema de cámara. Cuando se toman las precauciones para evitar la doble contabilidad, este método para MaxN puede reflejar más exactamente verdadera abundancia obtenida desde una cámara fija. En segundo lugar, porque video estéreo permite pescado a asignarse en un espacio tridimensional, estimaciones precisas de la distancia de la cámara pueden obtenerse para cada pez. Utilizando el percentil 95% de la distancia observada desde la cámara para establecer áreas específicos estudiadas, nos cuenta las diferencias en la detectabilidad entre especies evitando la dilución de las estimaciones de densidad mediante el uso de la distancia máxima que era una especie observado. Contabilidad para esta gama de detección es fundamental para estimar con precisión la abundancia de peces. Esta metodología facilitará la integración de rotación estéreo video herramientas en contextos de gestión y ciencia aplicada.
Introduction
A lo largo de la costa del Pacífico de Estados Unidos, muchas de las especies importantes para la pesca comercial y recreativa peces de fondo (por ejemplo, el complejo de rockfish (Sebastes spp.) y bacalao (Ophiodon elongatus)) están fuertemente asociados con hábitats de alto relieve, duros1,2,3,4,5. Gota de estéreo y vídeo cámaras son una atractiva herramienta no extractivo en hábitats rocosos debido a la relativa facilidad y simplicidad de la operación. Una variedad de sistemas de cámara de vídeo estéreo se han desarrollado y desplegado en el hemisferio sur, aguas poco profundas de los ecosistemas6,7,8,9,10y gota-cámaras de videos han ganado recientemente, tracción como una herramienta de gestión para entornos de arrecife rocoso de aguas profundas a lo largo de la costa del Pacífico11,12,13. Se intentó modificar estos diseños existentes de la cámara estéreo mediante un sistema de cámara de vídeo estéreo (en lo sucesivo, "Lander") para caracterizar mejor las poblaciones de peces en alto relieve seafloors a lo largo de la costa del Pacífico central (ver tabla de de Materiales). El Lander utilizado era diferente de los sistemas de videos existentes porque las cámaras se montaron a un bar giratorio central, que permite un completo 360° de cobertura del fondo marino en la ubicación de gota14. El Lander completó una rotación por minuto, lo que nos permitió caracterizar la abundancia y composición de la comunidad de un área rápidamente y alcanzar el mismo nivel de poder estadístico con menos despliegue de Lander. (Véase Starr (2016)14 para mayor detalle sobre las características de la configuración del módulo de aterrizaje). Pruebas preliminares en el sistema del estudio sugirieron que ocho rotaciones de las cámaras en nuestros estudios eran suficientes para caracterizar la riqueza y abundancia de las especies. Esta determinación se hizo por una observación de los rendimientos decrecientes en la abundancia de las especies y densidad de peces sobre las gotas más. Recomendamos que se realizó un estudio piloto incluyendo tiempos más largos de remojo en cualquier nuevo sistema para determinar el tiempo de remojo óptimas para una especie de estudio de ecosistema dado.
Mediante el uso de cámaras estéreo pares, tanto área de estudio total y densidad de peces absoluta puede calcularse para cada encuesta video; sin embargo, el uso de cámaras de rotación hizo necesario la modificación del tradicional pescado cuenta métricas. Estacionarios Videosistemas utilizan más a menudo "MaxN" como una conservador cuenta de peces en un despliegue6,10. MaxN tradicional describe el número máximo de peces de una determinada especie observado juntos en un solo fotograma de vídeo, con el fin de evitar el doble conteo de un pez que se dejaron y regresaron a marco. MaxN ha sido por lo tanto una estimación del número mínimo de peces conocidos para estar presente y puede subestimar el verdadero pescado abundancia6,10. La métrica MaxN fue redefinida para representar el mayor número de peces en cada rotación completa de las cámaras.
La segunda modificación a los métodos anteriores de videos estéreos era para tener en cuenta el hecho de que las especies de diferentes tamaños, color, y formas tienen diferentes distancias máximas de una identificación fiable. Por ejemplo, especies grandes como elongatus o tienen una forma alargada y pueden identificarse confiablemente a distancias mucho mayores en comparación con especies pequeñas y enigmáticas como el Squarespot Rockfish (Sebastes hopkinsi). Estos diferentes rangos máximos de detectabilidad cambian el área efectiva muestreado por el Lander para cada especie. Porque las cámaras estéreas nos permiten colocar cada pescado en un espacio tridimensional con un alto grado de precisión, uno puede determinar la distancia de las cámaras que cada pescado fue medido (es decir, la distancia de la"Z" por el "eje z" que es perpendicular a la línea recta trazada entre las cámaras). Para cada especie, la distancia dentro de los cuales el 95% de todos los individuos fueron observado (en adelante "distancia de 95% Z") se considera el radio de la zona de estudio y se utilizó para calcular el área total encuestado. Además de características específicos, identificabilidad se verá afectada por condiciones ambientales tales como la turbidez del agua. Porque estos factores pueden variar en tiempo y espacio, es importante utilizar la estadística de 95% Z sólo en conjunto. Mientras que va a ser altamente preciso para muestras grandes, cualquier una encuesta individual puede variar en área encuestada.
El protocolo que se detalla a continuación proporciona una guía sobre cómo crear y usar estas métricas. Aunque el objetivo era caracterizar el hábitat rocoso aguas profundas a lo largo de la costa del Pacífico, la metodología descrita para la cuenta MaxN modificada es fácilmente aplicable a cualquier sistema de cámara de gota giratoria. El número de rotaciones de cámara necesarios para caracterizar las poblaciones de peces dependerá de la dinámica de los ecosistemas locales, pero la conceptualización de la MaxN modificado seguirá siendo el mismo. Del mismo modo, mientras que utilizamos software fotogramétrico 3D para analizar vídeo estéreo, las técnicas descritas en este documento se aplican fácilmente a través de plataformas de software, como la localización exacta de los peces en un espacio tridimensional es posible. Además, el enfoque de la aplicación de un valor de 95% Z distancia podría considerarse en el futuro estudios con cámaras estéreo para tener en cuenta rangos específicos de detectabilidad y calcular con mayor precisión la abundancia de peces.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
Nota: Imágenes de los pasos de software se incluyen como Archivos complementarios. Tenga en cuenta que los pasos de software se describen a continuación son específicos para el software elegido (véase la Tabla de materiales). El enfoque general puede ampliarse a cualquier plataforma de software stereo.
1. preparar material de archivo de cámara estéreo para el análisis
Nota: Se recomienda la calibración utilizando un cubo de calibración. Un cubo de calibración es un tridimensional-marco de aluminio con precisamente puntos reflectantes colocados en la superficie. Cuando se utiliza en conjunción con software de calibración, un cubo de calibración conduce a una mayor precisión y exactitud que damero enfoques9.
- Calibrar las cámaras Lander con software de calibración de equipo de música (figura 1 y figura 2; véase Tabla de materiales para una recomendación de software).
Nota: Calibración puede verificarse antes de su uso en el campo mediante la medición de objetivos de tamaños conocidos a diferentes distancias (ver 1 Video complementario). Error en la medición promedio para un objetivo de 50 cm a distancias de 3 m (o menos) debería ser un 2% de la longitud de destino conocido. También tenga en cuenta que una calibración determinada sólo será válida si posiciones de cámara no cambian con respecto a uno con el otro. Es fundamental para cuidar y evitar empujones involuntarios de las cámaras hasta que se ha realizado muestreo todos. - Recopilar datos de campo con la Lander calibrado (figura 1, 2 de Video suplementaria).
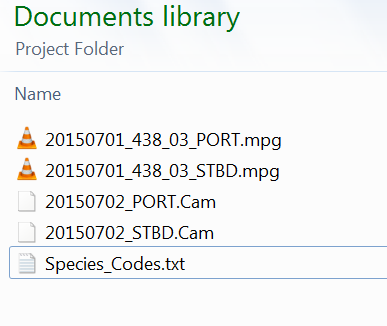
- Después de completar estudio de campo, crear una nueva carpeta de proyecto que contiene archivos de vídeo y calibración.
Nota: En cada proyecto de carpeta se necesita mínimo de cinco archivos: izquierda y derecha ". Archivos de calibración de cámara", los archivos de izquierda y derecha video (. MP4 o. Formato AVI solamente) y la lista de especies (formato .txt). - En el software de medición estéreo, iniciar un nuevo proyecto de medición y cargar archivos de vídeo y calibración apropiados.
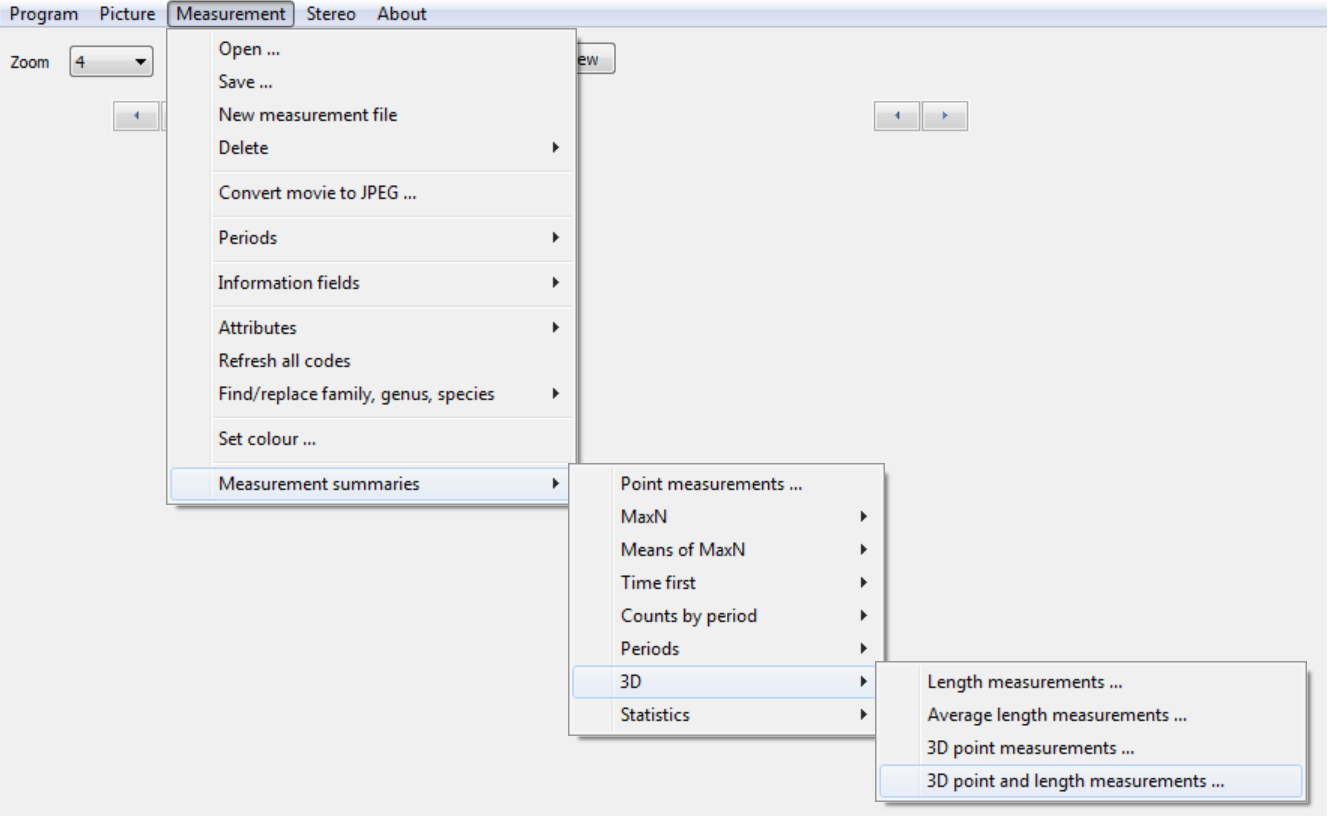
Nota: Imágenes de todos los pasos de software están disponibles entre los Archivos complementarios.- Desplácese a 'Medida' > 'Nuevo archivo de medida'.
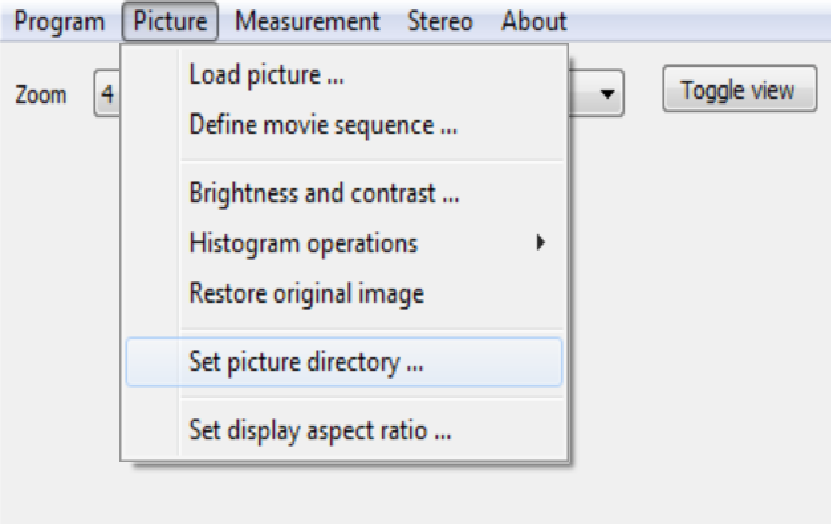
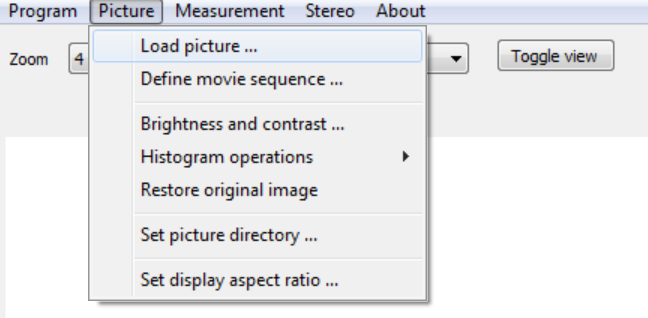
- Configurar el directorio de la imagen desplazándose a 'Imagen' > 'directorio de conjunto imagen' y elija la carpeta que contiene todos los archivos de proyecto.
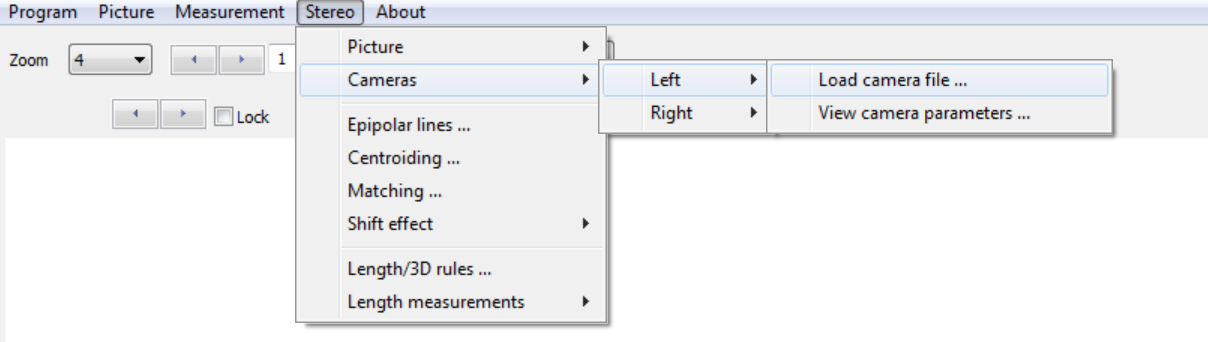
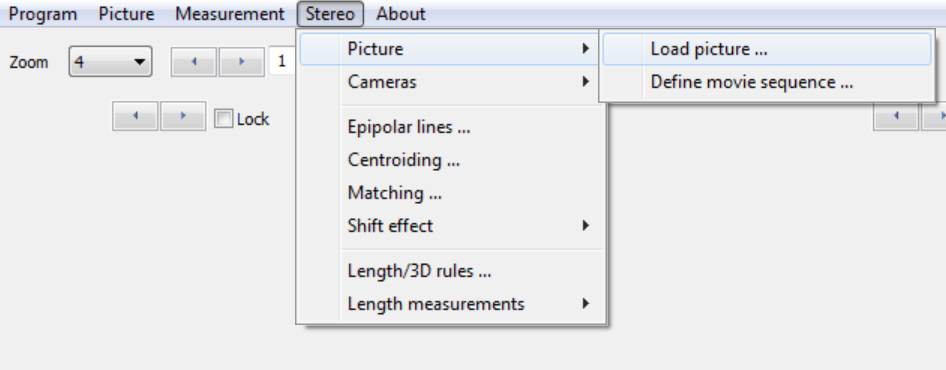
- La cámara izquierda de la carga ". Cam"archivo navegando en 'Estéreo' > 'Cámaras' > 'Izquierda' > 'Archivo de la cámara de carga' y seleccionar el archivo correspondiente.
- Repita el paso 1.4.3 para cargar la cámara ". Archivo de la CAM"
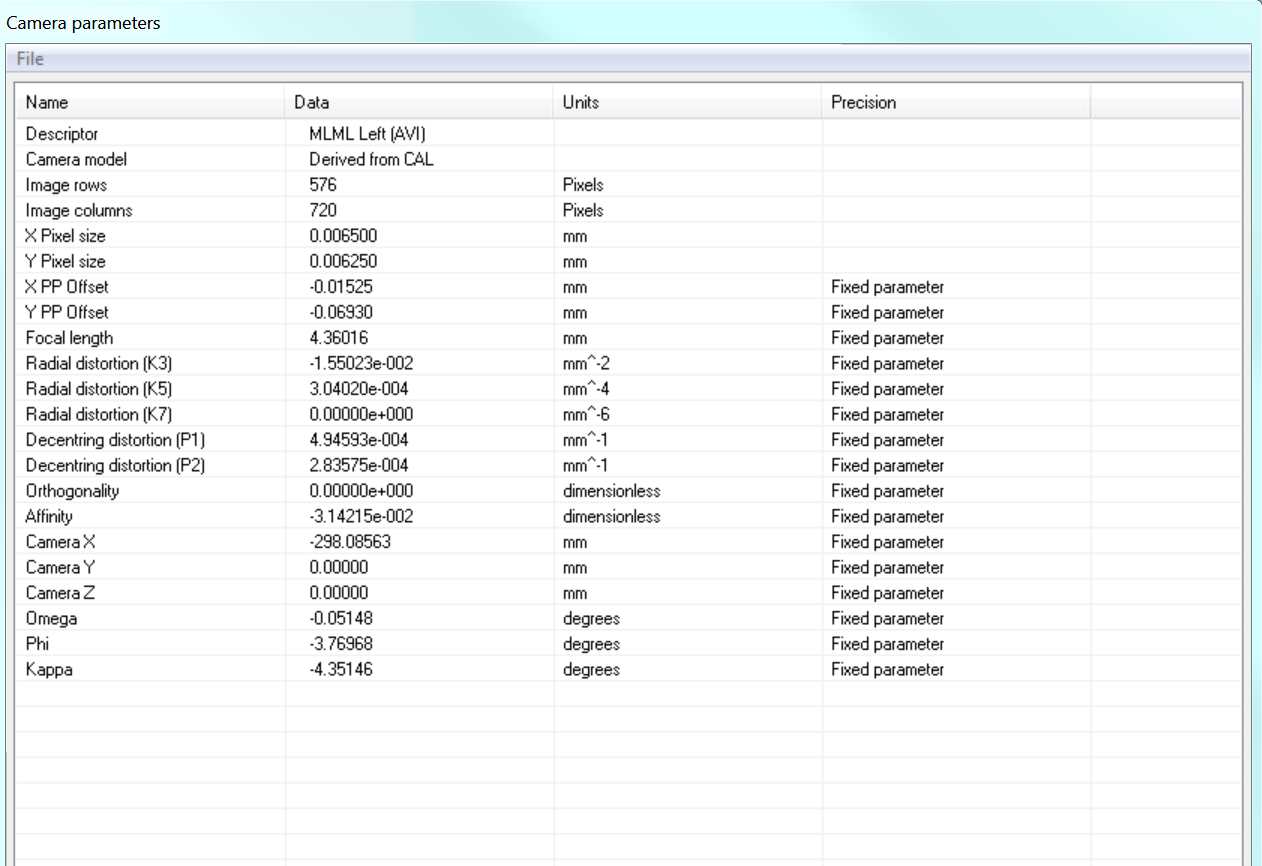
Nota: Estos archivos contienen las medidas de calibración para cada cámara (p. ej., tamaño de píxel, relación de aspecto, distorsión radial, decentring distorsión, etc.) y se utilizará para medir pescados y calcular la distancia de-la cámara (es decir, Z distancia). - Definir la secuencia de la película para el archivo de vídeo izquierda desplazándose a 'Imagen' > 'definir la secuencia de la película' y seleccionando el archivo video de la cámara izquierda.
- Cargar el archivo de vídeo izquierdo en software de medición seleccionando 'Imagen' > 'imagen de carga'.
Nota: Asegúrese de que la casilla de 'Lock' esté desactivada antes de cargar archivos de vídeo. Esto permite que ambos videos se carguen al mismo tiempo. - Definir archivo de vídeo secuencia y carga de película para el video derecho usando los menús 'Estéreo' > 'imagen' > 'definir la secuencia de la película' y 'Stereo' > 'imagen' > 'imagen de carga'.
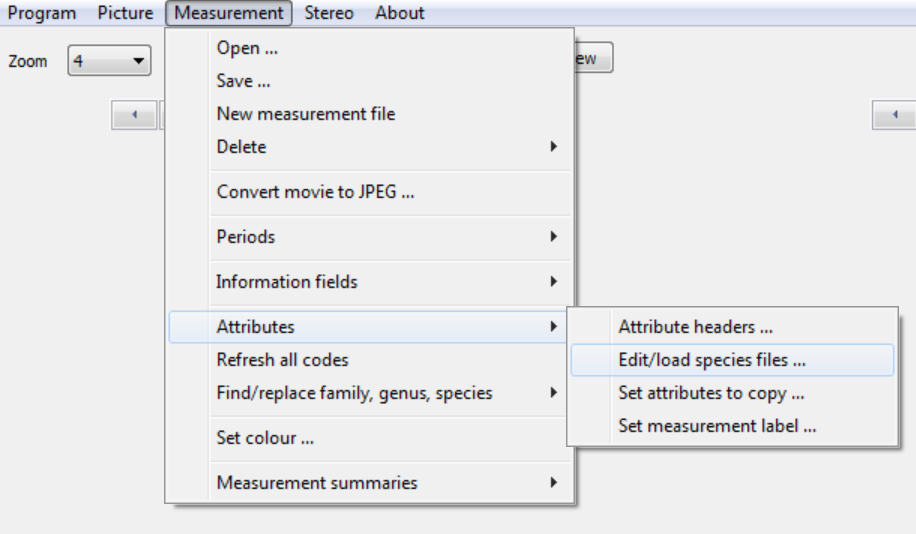
- La lista de especies de carga desplazándose a 'Medida' > 'Atributos' > ' editar/Cargar archivo de especies'.
- Introduzca información del identificador de encuesta en 'Campos de información' > 'Editar el valor del campo' y guardar archivo para crear una. Proyecto de EMObs.
- Sincronizar los vídeos con flash ligero, handclap, sello de hora Universal coordinada (UTC) o cualquier evento concreto de tiempo que se produce en ambos videos.
- Si se usa la hora UTC, marco-paso en el video izquierdo hasta que la hora comience una nueva segunda. Marco más adelante hasta la luz del flash o handclap ocurre.
- Marco-paso el video derecho hacia delante hasta que la hora corresponda exactamente con el video de la izquierda. Marco otro paso adelante hasta que el momento exacto la luz flash o handclap coincida con el vídeo de la izquierda.
Nota: Es importante que videos se sincroniza con el mismo marco. Sincronización de vídeo debe revisarse periódicamente con la marca de tiempo del video para evitar deriva de marco de cámara durante el análisis. Un clap mano filmada también podría utilizar al principio y al final del video para probar ese derecho e izquierdos videos fueron sincronizados con el mismo marco.
- Haga clic en el botón 'Lock' para garantizar videos jugar juntos y mantienen la sincronización.
2. generar puntos de conteo y cálculo MaxN
Nota: Cada pescado inicialmente se marca con un punto 2D a la menor resolución taxonómica. Pescado con identificación incierta debe ser marcado para revisión posterior.
- Espere para comenzar a contar peces hasta el final de una rotación completa de la cámara para asegurarse de que utiliza 360 grados. También espere hasta que el sedimento ha autorizado (generalmente < 1-2 min después del contacto con la parte inferior).
- Tan pronto como el Lander comienza su primera rotación, haga clic derecho para definir un nuevo período de la muestra: 'Definiciones de período' > 'Añadir nuevo inicio período'. Nombre período primer como "01" y haga clic en "Aceptar".
- Mientras que el Lander gira, comienzan cada pescado que entra en el marco con un punto 2D utilizando sólo la cámara izquierda de la marca.
- Para agregar un punto 2D, haga clic derecho, seleccionar "Añadir punto" y elegir el nombre de la especie correcta. Etiqueta para el nivel más bajo posible taxonómico, seleccionar «spp.» de especies desconocidas y haga clic en "Aceptar".
- Seguir marcar cada pez nuevo según paso 2.2.1 hasta la conclusión de la rotación.
- Repita el protocolo procedimientos 2.1-2.2 para cada rotación adicional de Lander - asegurar que un nuevo período es definido al inicio de cada rotación de la cámara.
Nota: Las curvas de acumulación de especies se utilizan para determinar que ocho rotaciones fueron, en promedio, suficientes para caracterizar la abundancia de peces en el presente estudio. Los investigadores deben considerar llevar a cabo pruebas preliminares con rotaciones de cámara adicional, sobre tiempos más largos de remojo, para caracterizar el número óptimo de rotaciones de cámara dentro de un ecosistema particular. - Calcular cargos específicos de individuos observados por rotación de la cámara.
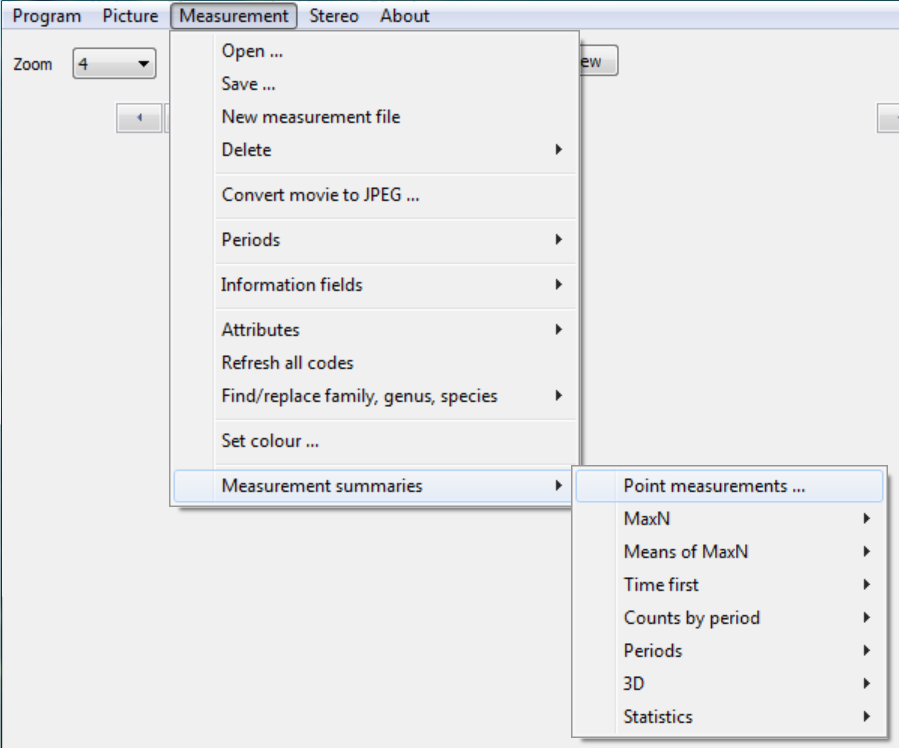
- Después de todas las rotaciones han sido enumeradas, exportación de puntos 2D desplazándose a 'Medida' > 'Resumen de medición' > 'Punto medidas' y guardar puntos 2D como archivo a.txt.
- Abra el archivo de punto de 2D.txt guardada como una hoja de cálculo y crear una tabla dinámica de especies vs número de rotación para resumir cuentas (tabla 1) desplazándose a 'Insertar' > 'Tabla dinámica'. Seleccione "Género y especie" para 'Etiqueta de la fila' y "Período" para 'Etiqueta de la columna'.
- Elegir el MaxN para cada especie mediante la selección de la rotación de la cámara que tiene el mayor número de individuos de esa especie (tabla 1).
- Para peces identificados sólo a género, seleccione un MaxN de nivel de género basado en la rotación que tuvo el mayor número de individuos identificados a especie de ese género particular.
Nota: Este paso ayuda a evitar la doble contabilización cada pez que sólo era identificables a grupos taxonómicos más altos (p. ej., sólo a género o familia). Por ejemplo, en la tabla 1, ' rotación 1' contiene 10 no identificado Sebastes spp y 33 miembros del género Sebastes identificados a especie, mientras que ' rotación 3' contiene sólo dos desconocidos Sebastes spp y 43 miembros de la el género que Sebastes identificados a especie. Por lo tanto ' rotación 3' se utilizará para MaxN cuenta de desconocidos Sebastes spp. De esta manera, se hace la suposición conservadora que 8 de los no identificados Sebastes spp. en ' rotación 1' fueron identificados en ' rotación 8'. - Si múltiples rotaciones tienen el mismo Conde MaxN para una especie dada, elegir la primera rotación con MaxN para mediciones de puntos 3D.
- Para cada especie, tomar mediciones 3D de peces en la rotación que MaxN ocurrió.
- Utilizar los puntos 2D guardados en pasos 2.1-2.3 para navegar a los pescados del mismo exactos para la medición 3D.
- Zoom en menos de 4 X para identificar mejor la punta del hocico del pez y los bordes de las aletas caudales (figura 3).
Nota: Puede ser necesario marco paso hacia adelante o hacia atrás para encontrar la mejor orientación de los peces para una medición 3D. La 'mejor' orientación es uno donde el hocico y los bordes de las aletas caudales son visibles en ambas cámaras. - Manualmente en la punta del hocico, luego el borde de la cola en la cámara izquierda, haga clic en repetir la selección en el mismo orden en el video de la derecha.
- Seleccione la especie correcta identificación de menús desplegables, como se hizo en 2.2.1.
- Si una medida de la longitud 3D no es posible, por ejemplo si la cabeza y la cola de los peces no son visibles en ambas cámaras, luego marque un punto 3D en cambio la izquierda haga clic en la misma posición de los peces en los videos de izquierda y derecha. Llene los campos de información como antes y dejar el comentario "Excluir de la medida de longitud".
Nota: MaxN puede ocurrir en diferentes rotaciones de las cámaras para las diferentes especies; sin embargo, para cualquier especie dada, las mediciones deben ocurrir en una rotación solamente (tabla 1).
- Después de completar las mediciones 3D para todos los peces, exportar archivo de as.txt de datos para su posterior análisis.
- Desplácese a 'Medida' > 'Resumen de medición' > 'mediciones de punto y la longitud 3D' y save.txt para exportación.
3. 95% Z distancia procedimiento para las áreas de estudio propios de cada especie
Nota: La distancia de 95% Z es una estimación de la distancia promedio de que una especie podría identificarse confiablemente en un determinado estudio y excluyendo casos de excepcionales condiciones de claridad del agua o la iluminación. Este cálculo tiene en cuenta las condiciones oceanográficas promedio para un determinado estudio y será necesario volver a calculado para cada nuevo estudio.
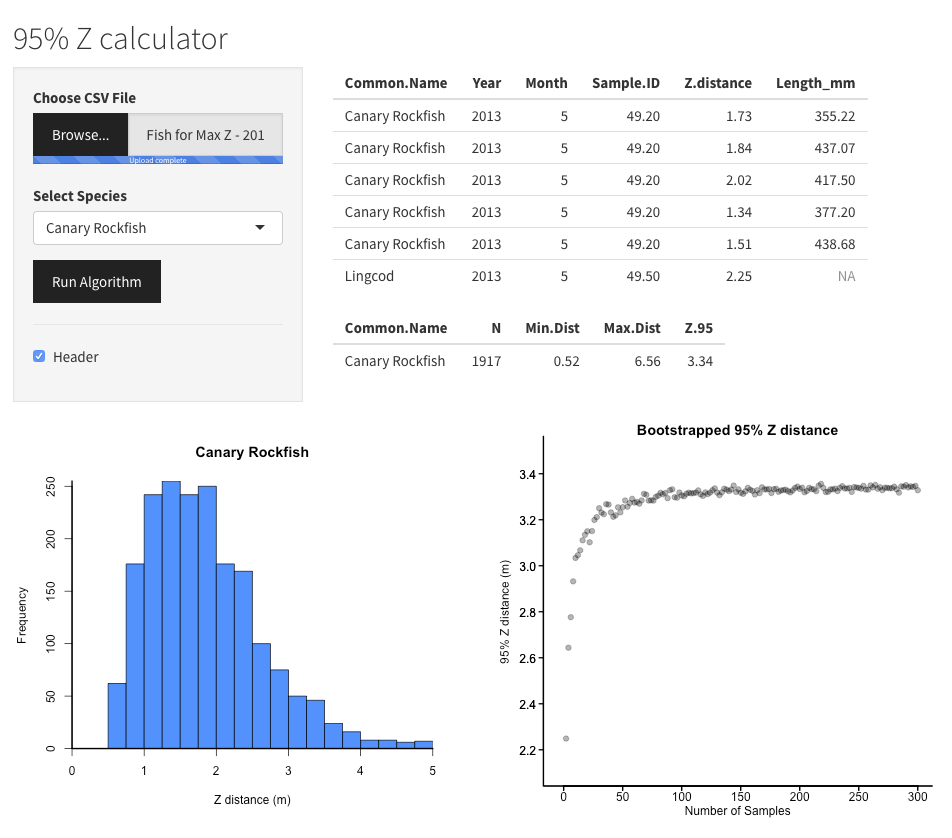
- Uso simple de arranque para determinar si el tamaño de muestra es suficientemente grande como para caracterizar la distancia de detección confiable para cada especie.
- Para cada clase de tamaño de muestra (p. ej., recipientes de tamaño de muestra de 5 pescados), 1.000 al azar dibuja del tamaño de muestra seleccionada con el reemplazo de la población de la muestra y calcular la media cuantil del 95% de las distancias de estos 1.000 dibuja y trazar la resultante curva asintótica. Ver el código suministrado en el suplementario los archivos 1 y 2.
- Verificar que se obtuvieron muestras adecuadas comparando el tamaño de la muestra real con la asíntota de 95% Z distancia con el aumento de tamaño de la muestra.
- Calcular el valor de 95% Z distancia como el cuantil del 95% de distancia de la cámara medido para una especie a través de todas las encuestas.
- Calcular el área efectiva para cada especie con el valor del 95% Z.
Nota: En el caso de un rotación Lander, la representa valor de 95% Z el radio externo de una franja encuesta, con el radio interior determinada por la configuración física de la herramienta y cómo cerca de la base de las cámaras es capaces de observar. Mientras gira el Lander, se forma una zona de 'buñuelo' en forma de encuesta (figura 4).- Calcular el área encuestada como:

Nota: por ejemplo, una especie relativamente grande como Yelloweye Rockfish (Sebastes ruberrimus) tenía una distancia de 95% Z de 3,3 m y un área de estudio efectivo de 30,9 m2 por despliegue de Lander: 34,3 m2 (círculo externo) - 3,4 m2 (interno círculo) = 30,9 m2 (área de estudio total).
- Calcular el área encuestada como:
- Usando el área calculado encuestados recuentos de especies individuales (paso 3.3.1), convert (MaxN) en estimaciones de densidad por cada encuesta visual utilizando la ecuación:

Nota: Un procedimiento similar podría ser usado para calcular una densidad volumétrica, en lugar de una densidad; sin embargo, ese proceso no se describe aquí.



Tabla 1: tabla resumen ejemplo MaxN. La selección de MaxN para cada especie se demuestra con texto rojo y en negrita. Tenga en cuenta que un MaxN conservador para no identificado Sebastes spp fue determinada por la rotación con la mayoría Sebastes identificado especies (rotación 3). También, mientras que este estudio utilizó ocho rotaciones de cámara, sólo cuatro rotaciones se muestran en la tabla 1 para la simplicidad. El proceso de selección MaxN es idéntico independientemente del número de rotaciones.

Figura 1: Lander vídeo estéreo. Hardware clave numerada (1) umbilical, 300 m (2) dos grabadoras de video digital (DVR) con tarjetas de memoria de 32 GB extraíble interior impermeable, (3) dos LEDs salir 3.000 lúmenes a una temperatura de color de 5.000 K y (4). dos cámaras con resolución de líneas (líneas de TV) TV 620. Haga clic aquí para ver una versión más grande de esta figura.

Figura 2: cubo de calibración (500 x 500 x 300 mm). Ejemplo de una calibración con un 'cubo de calibración' se muestra en dos orientaciones diferentes: (A) el lado derecho del cubo es expulsado hacia las cámaras, y (B) la cara del cubo es paralela a la cara de las cámaras. Puntos rojos indican los puntos de referencia utilizados en este método de calibración particular y siempre deben ser identificados en el orden numerado. Haga clic aquí para ver una versión más grande de esta figura.

Figura 3: medición 3D colocado en miniatus Sebastes. La punta del hocico y del extremo de la cola fueron identificados en cada fotograma de la cámara para permitir la medición estéreo. Haga clic aquí para ver una versión más grande de esta figura.

Figura 4: zona por la herramienta de Lander. Área efectiva por la herramienta de Lander fue limitado por el mínimo distancia de Z y la distancia de 95% Z para cada especie. Observe que esta área crea un volumen de 'buñuelo' en forma de encuesta alrededor de lo Lander. Haga clic aquí para ver una versión más grande de esta figura.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Entre 2013 y 2014, llevamos a cabo 816 encuestas con el Lander de vídeo estéreo giratorio (figura 1) a lo largo de la costa central de California y MaxN y 95% Z distancia (figura 4) datos recogidos en más de 20 especies. Había patrones claros en la gama perceptible efectiva de especies observadas, probablemente debido a la interacción de la especie tamaño, forma y coloración (figura 5). Por ejemplo, la bandera Rockfish (Sebastes rubrivinctus) tiene distintas bandas en sus lados para seguros de identificación a mayores distancias que otras especies de tamaño similar. Asimismo, Canarias Rockfish (Sebastes pinniger) son relativamente grandes de cuerpo, pero tienen una pigmentación que es similar a otras especies, lo que dificulta más identificar a distancia (figura 5).
Utilizamos dos especies para demostrar los cálculos de valores de 95% Z distancia y MaxN: pigmeo Rockfish (Sebastes algunas) y bacalao (o. elongatus). El primero es un pez pequeño de cuerpo que puede ser difícil de identificar a distancia; mientras que o. elongatus es relativamente grande, tiene una forma distinta y es más fácilmente identificable. 2013-2014, se obtuvieron 1.191 medidas para algunas S. y 1.222 para o. elongatus . Entonces, los cuantiles 95% de las distancias a que estas especies se observaron: las distancias del 95% Z fueron 2,65 m para calcularon S. algunas y 3,96 m de o. elongatus (figura 5). Estas distancias de 95% Z se traducen en áreas de estudio efectivo de 18,6 m2 y 46,0 m2 para algunas S. y o. elongatus, respectivamente. Un simple análisis bootstrap confirmó esa muestra suficiente de tamaños fueron obtenidos para la caracterización de los valores de distancia Z 95%. Ambas especies, la estimación de distancia 95% Z estabilizado cuando más de 50 encuestas que contienen estas especies se muestrearon, proporcionando pruebas sólidas de que los tamaños de muestra solicitadas eran más adecuados para caracterizar el área de muestra de Lander eficaz para estos especies (figura 6).
MaxN cuentas por encuesta fueron convertidas luego en densidad (número de peces/m2). Utilizamos las estimaciones de la densidad de las 816 encuestas para probar la hipótesis hay y Rockfish pigmeo se observaría principalmente en hábitats de alto relieve. Para ambas especies, hubo significativamente mayor densidad sobre alivio de media y alto en comparación con hábitats de bajo relieve (Kruskal-Wallis, p <<. 001; Figura 7). Estos resultados eran constantes con las asociaciones previamente divulgados del hábitat de ambas especies15. No hubo diferencias entre medio y alto relieve hábitat para cualquier especie.
Para entender cómo la rotación Lander comparado con sistemas de cámara fija tradicional, calculamos las diferencias en densidad y estimaciones de variabilidad entre una gira y un Lander estacionario simulado. Asumimos que un Lander de cámara fijo típico tendría un campo de visión de 90 grados. El Lander giratorio tiene un campo de visión de 60 grados y requiere 5 segundos de rotación completar una visión de 90 grados. Con 261 encuestas, se seleccionaron datos de observación de peces de los 5 segundos mediados de rotaciones de Lander establecer MaxN. Estimaciones de densidad para el pseudo estacionario Lander fueron estandarizadas mediante el uso de las áreas reducidas de la cobertura (es decir, aproximadamente ¼ el área de la Lander giratorio). Las diferencias en densidad media y coeficiente de variación entre Landers rotativos y pseudo-estacionarios fueron evaluadas con prueba de t de Welch. Significa que las densidades obtenidas por la cámara giratoria fueron 18% mayores que las obtenidas con cámaras fijas (t21,7 de Welch, p = 0.081, figura 8A). Además, el coeficiente de variación fue 1.8 veces mayor con la cámara inmóvil frente a cámaras de rotación (t15.1 de Welch, p < 0.001, figura 8).

Figura 5 : Z distancias observaron para seleccionadas especies. Barras verticales de color rojo indican la distancia Z (0,81 m de cámaras) a la izquierda y el valor de la distancia Z de 95% a la derecha. Tenga en cuenta que esto representa el área promedio encuesta efectiva alrededor de la Lander para cada especie. Haga clic aquí para ver una versión más grande de esta figura.

Figura 6 : Hizo valores de distancia de Z. De arranque para aumentar el tamaño de muestra para observaciones o. elongatus (A) S. algunas y (B). Tamaño de las muestras que van desde 3-300 se hizo 1000 veces cada uno para calcular la distancia promedio de 95% Z y comprobar que los tamaños de muestra fueron adecuados. Tenga en cuenta que los valores del eje y rango de 2.0-2.6 m de S. algunas y de 2.6-4.0 m para o. elongatus. Haga clic aquí para ver una versión más grande de esta figura.

Figura 7 : Las diferencias de hábitat de dos especies selectas. Densidades promedio (± SE) de (A) S. algunas y (B) o. elongatus miden en hábitat de roca de bajo, medio y alto relieve. Haga clic aquí para ver una versión más grande de esta figura.

Figura 8 : Diferencias entre landers rotativos y-estacionarios. Ambas estimaciones de (A) significan densidad (peces/m2 ± SE) y (B) Media Coeficiente de variación (CV) ± SE de 261 encuestas se presentan. Haga clic aquí para ver una versión más grande de esta figura.

Video complementario 1: verificación de la calibración. Calibración puede verificarse antes de su uso en el campo mediante la medición de objetivos de tamaños conocidos en varias distancias. Por favor haga clic aquí para ver este video. (Clic derecho para descargar)

Video complementario 2: secuencias de reconocimiento subacuático. Por favor haga clic aquí para ver este video. (Clic derecho para descargar)
Subscription Required. Please recommend JoVE to your librarian.
Discussion
La métrica MaxN tradicional se basa en la idea de contar un número mínimo garantizado de personas presentes durante una encuesta. Si un cierto número de peces es visible simultáneamente en un único fotograma de vídeo, no puede ser todo menos presente, sino porque los peces son heterogéneamente distribuidos y móviles, la posibilidad de ver a todos los individuos simultáneamente durante un solo fotograma de vídeo es baja . Por lo tanto es probable que MaxN tradicional subestima el verdadero pescado abundancia16,17. Además, se ha demostrado que MaxN tradicional puede mostrar relaciones no lineales negativamente sesgada con creciente abundancia de pescado16,18. Esto puede estar relacionado con el fenómeno de la saturación de engranaje por el que no detecte cierto aumenta en abundancia19,20índices de abundancia relativa. Por el contrario, la aparente estabilidad de un índice con verdadera disminución de la abundancia de peces se ha denominado 'hyperstability' y en última instancia puede conducir a la caída de las poblaciones de peces21,22. Un estudio reciente informó que la inestabilidad en MaxN podría aliviarse incrementando el campo visual encuestados16. En ese estudio, la relación entre MaxN y abundancia verdadera se convirtió cada vez más lineal como el campo de visión se acercó a 100% (es decir, 360 grados).
Los resultados de la simulación de cámara estacionaria indican congruencia con los resultados anteriores y sugieren que el valor de MaxN puede caracterizar mejor la abundancia de peces. Por ejemplo, el coeficiente promedio estimado de la varianza se redujo entre las estimaciones de densidad derivadas de la rotación Lander en comparación con el Lander pseudo estacionario. Esto es probable debido a que el pescado se distribuye heterogéneamente y cámaras fijas son más propensos a la 'miss' los peces presentes si el Lander enfrenta a la dirección equivocada. Landers giratorios maximizan el esfuerzo de muestreo inspeccionando los 360 grados alrededor de la herramienta, y el efecto neto es reducir costo de muestreo y la varianza, y un aumento general en el poder estadístico del estudio. Estudios futuros podrían abordar mejor este tema directamente probando un Lander giratorio con un Lander fijo separado en un diseño de encuesta emparejados. Asimismo, hemos podido comprobar directamente la relación entre MaxN y abundancia verdadera en este estudio y estudios futuros podrían directamente comprobarlo utilizando cualquier simulación o ambientes, controlados, como se hizo en Campbell (2015)16.
Una posible crítica del enfoque MaxN modificado es la posibilidad de los individuos cuentas doble. Porque el Lander hizo una rotación por minuto, y las especies bentónicas de interés en el ecosistema tienden a ser relativamente sedentarios y lento movimiento bajo condiciones más, creemos que el riesgo de contar doble era bajo. Además, se observaron casos donde peces entrar o salir de la zona de estudio a lo largo de las ocho rotaciones. Se tomaron precauciones adicionales para evitar la doble contabilización como el uso de la rotación con el mayor número de individuos de un género determinado contar especies no identificadas. Se han propuesto otros indicadores como índices de abundancia de peces tales como recuento de decir; sin embargo, éstos también han demostrado consistentemente subestimar abundancia verdadera mientras que aumenta la variabilidad entre densidad estima16. MaxN por lo tanto se recomienda como una medida más precisa de la abundancia de peces. Mientras que nuestra métrica MaxN modificada garantiza una estimación conservadora del número mínimo absoluto de las personas, en general estamos seguros de que este acercamiento MaxN modificado proporciona mejor estimaciones de abundancia de peces de verdad, y eso cuenta demasiado el pescado es de interés relativamente bajas.
Visión lateral muchas video-transecto encuestas uso fijo ancho para estimar densidad para todas las especies del transecto. Del mismo modo, un acercamiento al uso de video estéreo Landers sería utilizar una distancia de cámara máxima para calcular ambos área encuestada y densidad de peces. Ambos pueden conducir a una subestimación de las especies que sólo son identificables confiablemente a distancias más pequeñas que el fijo de transectos de estimaciones de ancho23. La distancia a la que una especie se identifica confiablemente es causada por la interacción de factores tales como tamaño, forma, patrón de coloración, comportamiento de pescado, así como factores ambientales. El método de distancia 95% Z es particularmente ventajoso en que representa la interacción de todos estos factores simultáneamente. Por ejemplo, elongatus o. fue la especie que somos capaces de identificar a la mayor distancia, probablemente como resultado de su forma del cuerpo diferente, grande, alargado y tendencia de comportamiento para poner en el fondo marino. Rosy Rockfish (Sebastes rosaceus) tenía una de las distancias de Z menor, probablemente porque, como miembro del subgénero Sebastomus , tiene varios congéneres que se parecen mucho y son difíciles de distinguir a mayores distancias. Permitiéndole realizar sobre zonas encuestadas por la Lander, seamos capaces de estimar con mayor precisión la abundancia de peces. El enfoque bootstrap a la verificación del tamaño de muestra es simple y fácilmente implementados en otras encuestas, y creemos que el método de distancia 95% Z podría adaptarse más a línea de diseño de la encuesta de transectos. 95% Z distancia representaría entonces una distancia horizontal de detección confiable de especies observadas con herramientas de vehículo sumergible o remotamente funcionado (ROV). En el futuro, los investigadores pueden investigar utilizando teoría de muestreo de distancia a la densidad del modelo en función de la detectabilidad con distancia23,24.
Como hay un mayor uso de no-tomar reservas de pesca gestión25,26,27, hay una creciente necesidad de técnicas de muestreo no extractivo, especialmente en hábitats de aguas profundas no accesibles a diver encuestas. Sin embargo, también es necesario que estas técnicas proporcionan datos exactos y confiables sobre composición de especies, abundancia y longitud de pescado. Videos Landers son una herramienta de monitoreo relativamente nuevo que tiene un bajo costo, puede usarse en barcos de relativamente pequeñas de oportunidad y son logísticamente más simples funcionar que ROVs y sumergibles mientras que requieren a menos y menos personal cualificado. Si bien no se discute en estos métodos, estéreo cámara Landers son capaces de precisas medidas con error de menos del 2%. Además, Landers pueden rápidamente implementar sobre grandes áreas geográficas, aumento de inferencia estadística. Esperamos que el interés en video herramientas para aumentar como mirada de agencias de investigación para ajustar presupuestos y difundir más eficientemente el esfuerzo de muestreo de monitoreo. Nuestra modificación de MaxN y 95% Z distancia debe considerarse estudios ecológicos en el futuro utilizando la rotación videos Landers.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Los autores no tienen nada que revelar
Acknowledgments
Este trabajo fue financiado por The Nature Conservancy y donantes privados, recursos Legacy Fund Foundation, Gordon y Betty Moore Foundation, Environmental Defense Fund, programa Sea Grant de California, el programa nacional de investigación cooperativa de NMFS y una NOAA Beca de Saltonstall Kennedy #13-SWR-008. Investigación aplicada y la exploración marina (Dirk Rosen, Rick Botman, Andy Lauerman y David Jefferies) desarrollado, construido y mantenido la video herramienta de Lander. Agradecemos a Jim Seager y SeaGIS™ software para soporte técnico. Capitán y pescadores comerciales Tim Maricich y tripulación a bordo el F/V Donna Kathleen proporcionados apoyo en la implementación de la Lander de 2012-2015. Gracias a todos los que participaron en la recolección de datos de vídeo o análisis (Anne Tagini, Donna Kline, teniente Amber Payne, Bryon Downey, Marisa Ponte, Rebecca Miller, Matt Merrifield, Walter Heady, Steve Rienecke, EJ Dick y John Field).
Materials
| Name | Company | Catalog Number | Comments |
| calibration cube | SeaGIS | http://www.seagis.com.au/hardware.html | 1000x1000x500 mm is the preferred dimensions. Other methods of calibration are available. |
| CAL calibration software | SeaGIS | http://www.seagis.com.au/bundle.html | |
| EventMeasure stereo measurement software | SeaGIS | http://www.seagis.com.au/event.html | |
| Statistical software | R Core Team 2017 (v. 3.4.0) | Bootstrapping code can be found: https://github.com/rfields2017/JoVE-Bootstrap-Function | |
| Spreadsheet Software | Microsoft Excel | ||
| 2 waterproof cameras | Deep Sea Power and Light | HD quality preferred | |
| 2 depth rated, waterproof lights | Deep Sea Power and Light : 3000 lumen LED with 5000k color temperature | ||
| DVR recorder | Stack LTD DVR | ||
| standard PC | Windows 10 preferred OS | ||
| rotating Lander platform | Marine Applied Research and Engineering (MARE) |
References
- Love, M. S., Yoklavich, M. M., Thorsteinson, L. K. The Rockfishes of the Northeast Pacific. , University of California Press. Berkley. (2002).
- Laidig, T. E., Watters, D. L., Yoklavich, M. M. Demersal fish and habitat associations from visual surveys on the central California shelf. Estuar. Coast. Shelf Sci. 83 (4), 629-637 (2009).
- Anderson, T. J., Yoklavich, M. M. Multiscale habitat associations of deepwater demersal fishes off central California. Fish. Bull. 105 (2), 168-179 (2007).
- Yoklavich, M. M., Cailliet, G. M., Sullivan, D. E., Lea, R. N., Love, M. S. Habitat associations deep-water rockfishes a submarine canyon an example of a natural refuge. Fish. Bull. 98 (3), 625-641 (2000).
- Status of the Pacific Coast Groundfish Fishery, Stock Assessment and Fishery Evaluation. , Pacific Fishery Management Council. Portland, OR. (2016).
- Cappo, M., Harvey, E., Malcolm, H., Speare, P. Potential of video techniques to monitor diversity, abundance and size of fish in studies of marine protected areas. Aquatic protected areas- What works best and how do we know. Beumer, J. P., Grant, A., Smith, D. C. , Proc. World Congr. on Aquat Protected Areas. Australian Soc. for Fish Bio. North Beach, Western Australia. 455-464 (2003).
- McLean, D. L., Green, M., Harvey, E. S., Williams, A., Daley, R., Graham, K. J. Comparison of baited longlines and baited underwater cameras for assessing the composition of continental slope deepwater fish assemblages off southeast Australia. Deep-Sea Research Part I: Oceanographic Research Papers. 98, 10-20 (2015).
- Parker, D., Winker, H., et al. Insights from baited video sampling of temperate reef fishes: How biased are angling surveys. Fish. Res. 179, 191-201 (2016).
- Boutros, N., Shortis, M. R., Harvey, E. S. A comparison of calibration methods and system configurations of underwater stereo-video systems for applications in marine ecology. Limnol. Oceanogr. Methodss. 13 (5), 224-236 (2015).
- Harvey, E. S., Cappo, M., Butler, J. J., Hall, N., Kendrick, G. A. Bait attraction affects the performance of remote underwater video stations in assessment of demersal fish community structure. Mar. Ecol. Prog. Ser. 350, 245-254 (2007).
- Watson, J. L., Huntington, B. E. Assessing the performance of a cost-effective video lander for estimating relative abundance and diversity of nearshore fish assemblages. J. Exp. Mar. Bio. Ecol. 483, 104-111 (2016).
- Easton, R. R., Heppell, S. S., Hannah, R. W. Quantification of Habitat and Community Relationships among Nearshore Temperate Fishes Through Analysis of Drop Camera Video. Mar. Coast. Fish. 7 (1), 87-102 (2015).
- Hannah, R. W., Blume, M. T. O. Tests of an experimental unbaited video lander as a marine fish survey tool for high-relief deepwater rocky reefs. J. Exp. Mar. Bio. Ecol. 430, 1-9 (2012).
- Starr, R. M., Gleason, M. G., et al. Targeting Abundant Fish Stocks while Avoiding Overfished Species: Video and Fishing Surveys to Inform Management after Long-Term Fishery Closures. Plos One. 11 (12), 0168645 (2016).
- Love, M. S. Certainly more than you want to know about the fishes of the Pacific Coast: a postmodern experience. , Really Big Press. Santa Barbara, CA. (2011).
- Campbell, M. D., Pollack, A. G., Gledhill, C. T., Switzer, T. S., DeVries, D. A. Comparison of relative abundance indices calculated from two methods of generating video count data. Fish. Res. 170, 125-133 (2015).
- Cappo, M., Speare, P., De'ath, G. Comparison of baited remote underwater video stations (BRUVS) and prawn (shrimp) trawls for assessments of fish biodiversity in inter-reefal areas of the Great Barrier Reef Marine Park. J. Exp. Mar. Bio. Ecol. 302 (2), 123-152 (2004).
- Schobernd, Z. H., Bacheler, N. M., Conn, P. B., Trenkel, V. Examining the utility of alternative video monitoring metrics for indexing reef fish abundance. Can. Jour. Fish. Aquat. Sci. 71 (3), 464-471 (2014).
- Hansen, M. J., Schorfhaar, R. G., Selgeby, J. H. Gill-Net Saturation by Lake Trout in Michigan Waters of Lake Superior. North Am. J. Fish. Manag. 18 (4), 847-853 (1998).
- Dauk, P. C., Schwarz, C. J. Catch estimation in the presence of declining catch rate due to gear saturation. Biometrics. 57 (1), 287-293 (2001).
- Hilborn, R., Walters, C. J. Quantitative Fisheries Stock Assessment Choice, Dynamics and uncertainty. , Springer. Dordrecht. (1992).
- Erisman, B. E., Allen, L. G., Claisse, J. T., Pondella, D. J., Miller, E. F., Murray, J. H. The illusion of plenty: hyperstability masks collapses in two recreational fisheries that target fish spawning aggregations. Can. Jour. Fish. Aquat. Sci. 68, 1705-1716 (2011).
- Buckland, S. T., Anderson, D. R., Burnham, K. P., Laake, J. L. Distance Sampling: Estimating abundance of biological populations. , Chapman and Hill. London. (1993).
- Ronconi, R. A., Burger, A. E. Estimating seabird densities from vessel transects: Distance sampling and implications for strip transects. Aquat. Bio. 4 (3), 297-309 (2008).
- Caselle, J. E., Rassweiler, A., Hamilton, S. L., Warner, R. R. Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected areas Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected. Nat. Publ. Gr. , 1-14 (2015).
- Starr, R. M., Wendt, D. E., et al. Variation in Responses of Fishes across Multiple Reserves within a Network of Marine Protected Areas in Temperate Waters. Plos One. 10 (3), 0118502 (2015).
- Lester, S., Halpern, B., et al. Biological effects within no-take marine reserves: a global synthesis. Mar. Ecol. Prog. Ser. 384, 33-46 (2009).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}