

Summary
Vi beskriver en ny metod för räknar fiskar och uppskatta relativa överflöd (MaxN) och fisk densitet med roterande stereo-video kamerasystem. Vi visar också hur du använder avstånd från kameran (Z avstånd) för att uppskatta artspecifika upptäcktsrisken.
Abstract
Användningen av video kamera systemen i ekologiska studier i fisk fortsätter att vinna dragning som en livskraftig, icke-utvinnings metod att mäta fisken längder och uppskatta fisk överflöd. Vi utvecklat och implementerat ett roterande stereo-video kameraverktyg som täcker en full 360 grader för provtagning, vilket maximerar provtagning ansträngning jämfört med stillastående kamera verktyg. En mängd studier har detaljerade statiska, stereo-kamera system förmåga att få mycket exakt och exakta mätningar av fisk; fokus var på utvecklingen av metoder att kvantifiera fisk densitet med roterande kamerasystem. Den första metoden var att utveckla en ändring av mått MaxN, vilket normalt är en konservativ beräkning av minsta antalet fiskar observerats på en viss kamera undersökning. Vi omdefiniera MaxN att det maximala antalet fiskar som observerats i någon viss rotation av kamerasystem. När försiktighetsåtgärder vidtas för att undvika dubbelräkning, kan denna metod för MaxN mer exakt speglar sant överflöd än som erhållits från en fast kamera. För det andra, eftersom stereo-video gör fisk ska mappas i tredimensionella rymden, exakta beräkningar av avstånd-från-kameran kan erhållas för varje fisk. Genom att använda den 95% percentilen av observerade avståndet från kameran för att upprätta artspecifika områden tillfrågade, redogöra vi för skillnader i upptäcktsrisken bland arter samtidigt undvika att späda densitet uppskattningar med hjälp av det maximala avståndet en art var observerats. Redovisningen av detta utbud av upptäcktsrisken är kritiska att korrekt uppskatta fisk sammansättning. Denna metod kommer att underlätta integrationen av roterande stereo-video verktyg i både tillämpad vetenskap och management sammanhang.
Introduction
Längs den amerikanska Stillahavskusten är många av arterna som är viktigt att kommersiellt och bottenlevande fiske (t.ex., de rockfish komplexa (Sebastes spp.) och Lingcod (Ophiodon elongatus)) starkt förknippad med hög relief, hård-botten livsmiljöer1,2,3,4,5. Stereo-video drop kameror är en attraktiv icke-utvinnings verktyg att använda i bergsmiljöer på grund av den relativa lätthet och enkelhet i drift. En mängd stereo-video kamerasystem har utvecklats och distribuerats i södra halvklotet, grunt vatten ekosystem6,7,8,9,10, och nyligen, drop-videokameror vunnit dragkraft som ett förvaltningsverktyg för djupt vatten rocky-reef miljöer längs Stillahavskusten11,12,13. Vi försökte ändra dessa befintliga stereo-kamera konstruktioner genom att använda ett stereo-video kamerasystem (hädanefter benämnd ”Lander”) att mer effektivt karakterisera fiskpopulationer i hög relief havsbotten längs den centrala Stillahavskusten (se tabellen Material). De Lander som används var annorlunda än befintliga videosystem eftersom kamerorna monterades till en central roterande bar, som möjliggjorde en full 360° täckning av havsbotten på droppe plats14. Lander avslutade ett fullständiga varv per minut, vilket tillät oss att snabbt karakterisera överflöd och gemenskapens sammansättningen av ett område och uppnå samma nivå av statistisk effekt med färre Lander distributioner. (Se Starr (2016)14 för närmare på detaljerna i Lander konfigurationen). Preliminära tester i studien systemet föreslog att åtta rotationer av kamerorna i våra enkäter var tillräckliga för att karaktärisera arter överflöd och rikedom. Denna beslutsamhet gjorde en observation av avtagande avkastning i arter överflöd och fisk densitet över längre droppar. Vi rekommenderar att en pilotstudie inklusive längre blöt gånger genomföras i alla nya system att bestämma den optimala blöt tid för en given ekosystem/studie art.
Med hjälp av ihopparade stereo kameror, både total undersökning område och absolut fisk densitet kan beräknas för varje video undersökning; användning av roterande kameror krävde dock ändring av traditionella fisk antal mätvärden. Stationära videosystem använder oftast ”MaxN” som en konservativ antal fiskar på en distribution6,10. Traditionella MaxN beskriver det maximala antalet av en viss arter observerats tillsammans i en enskild bildruta, för att undvika dubbelräkning en fisk som har lämnat och återvänt till ram. MaxN har därför varit en uppskattning av det minsta antalet fisk känd att vara närvarande och kan underskatta sant fisk överflöd6,10. MaxN måttet omdefinierades för att representera det största antalet fisk ses i varje full rotation av kameror.
Den andra ändringen tidigare stereo video metoder var att ta hänsyn till faktumen att arter i olika storlekar, färg, och former har olika högsta avstånd på tillförlitlig identifiering. Exempelvis stora arter såsom O. elongatus har en distinkt avlång form och kan på ett tillförlitligt sätt identifieras på mycket större avstånd jämfört med små och kryptiska arter såsom den Squarespot havskatt (Sebastes hopkinsi). Dessa olika maximala intervall av upptäcktsrisken ändra området effektiva urvalet av Lander för varje art. Eftersom kamerorna stereo tillåter oss att placera varje fisk i tredimensionella rymden med en hög grad av noggrannhet, kan man bestämma avståndet från de kameror som varje fisk var mätt (dvs”Z avstånd”, uppkallad efter ”z-axeln” som är vinkelrät mot den raka linjen mellan kamerorna). För varje art, avståndet inom vilken 95% av alla individer observerades (härefter ”95% Z-distans”) ansågs vara radien på området, och användes för att beräkna den totala areal som tillfrågade. Förutom artspecifika egenskaper påverkas identifierbarhet av miljöförhållanden som vattnets grumlighet. Eftersom dessa faktorer kan variera i tid och rum, är det viktigt att använda den 95% Z-statistiken endast i aggregat. Medan det kommer vara mycket noggranna för stora prover, kan någon en individuell undersökning variera i området tillfrågade.
Protokollet beskrivs nedan ger vägledning om hur du skapar och använder dessa mätvärden. Fast fokus var att karakterisera deep-water rocky livsmiljö längs Stillahavskusten, är den metod som beskrivs för modifierade MaxN räkna lättillämpliga till roterande drop-kamera-system. Antalet kamera rotationer krävs att karakterisera fiskpopulationer beror på lokala ekosystem dynamics, men konceptualisering av den modifierade MaxN förblir desamma. Likaså tillämpas vi använde 3D fotogrammetriska programvara för att analysera stereo video, de tekniker som beskrivs häri enkelt på programvaruplattformar, så länge den exakta platsen för fisk i tredimensionella rymden är möjligt. Dessutom kunde metoden att tillämpa ett 95% Z avstånd värde anses i framtida studier med stereo-kameror att ta hänsyn till artspecifika spänner av upptäcktsrisken och att mer exakt beräkna fisk överflöd.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
Obs: Skärmdumpar programvara steg ingår som Kompletterande filer. Observera att programvaran stegen som beskrivs nedan är specifika för det valda programmet (se Tabell för material). Den övergripande strategin kan förlängas till någon stereo mjukvaruplattform.
1. Förbered Stereo-kamera film för analys
Obs: Rekommenderas kalibrering med hjälp av en kalibrering kub. En kalibrering kub är en tredimensionell aluminium-ram med exakt positionerade reflekterande prickar på ytan. När används tillsammans med kalibrering programvara, leder en kalibrering kub till större precision och noggrannhet än schackrutiga metoder9.
- Kalibrera kamerorna Lander med stereo-kalibrering programvara (figur 1 och figur 2; se Tabell för material till programvara rekommendation).
Obs: Kalibrering kan verifieras före användning i fältet genom att mäta mål av kända storlekar på olika avstånd (se kompletterande Video 1). Genomsnittliga mätfel för ett 50 cm mål på avstånd av 3 m (eller mindre) bör vara inom 2% av kända mål längd. Observera också att en viss kalibrerings endast blir giltiga om kamerapositioner inte ändrar i förhållande till varandra. Det är viktigt att ta hand och undvika oavsiktliga trängdes av kameror tills alla provtagning har utförts. - Samla in data i fält med hjälp av kalibrerade Lander (figur 1, kompletterande Video 2).
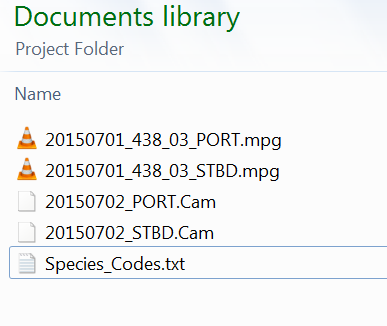
- Efter fältstudie är komplett, skapa en ny projektmapp som innehåller både video och kalibrering-filer.
Obs: I varje projekt broschyren där behöver minst fem filer: vänster och höger ”. Cam ”kalibrering filer, filerna vänster och höger video (. MP4 eller. AVI-format), och listan arter (TXT-format). - Starta ett nytt projekt för mätning i stereo mätning-programvaran och ladda lämpliga video och kalibrering filer.
Obs: Skärmdumpar av alla programvara steg finns bland de Kompletterande filer.- Navigera till 'Mätning' > 'Nya mätning fil'.
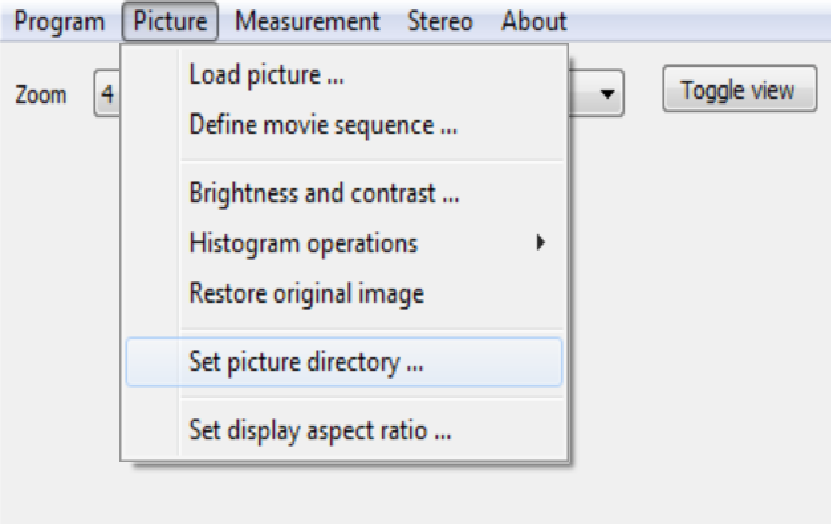
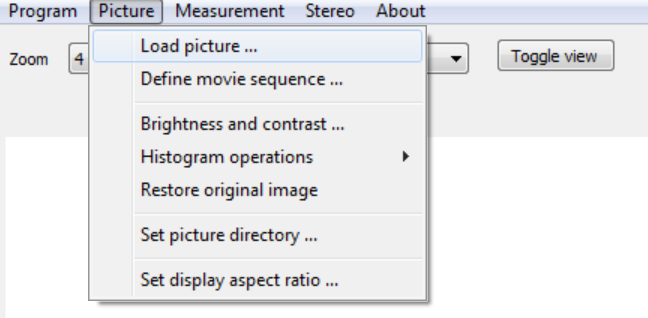
- Ange katalogen bild genom att navigera till 'Bild' > 'ange bild katalog', och välj den mapp som innehåller alla projektfiler.
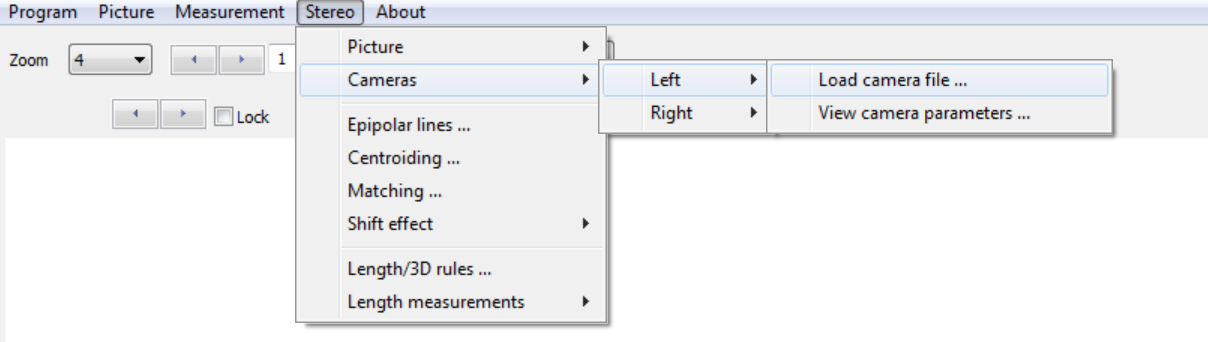
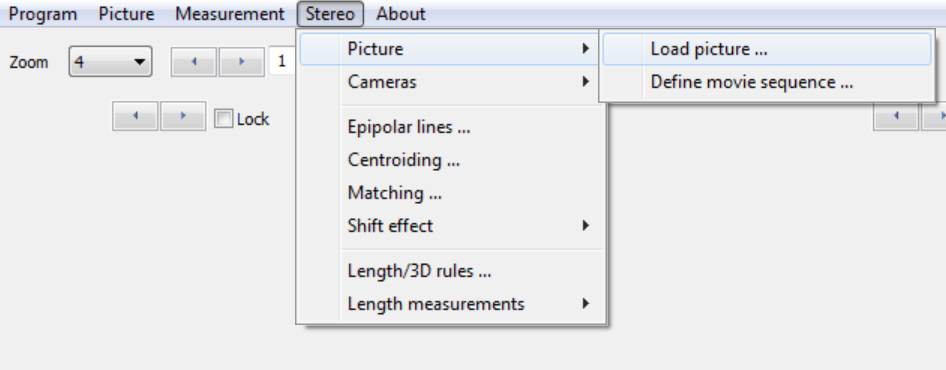
- Ladda kamerans vänster ”. Cam ”fil genom att navigera till 'Stereo' > 'Kameror' > 'Lämnade' > 'Ladda kameran fil' och välja lämplig fil.
- Upprepa steg 1.4.3 Ladda rätt kameran ”. Cam ”fil
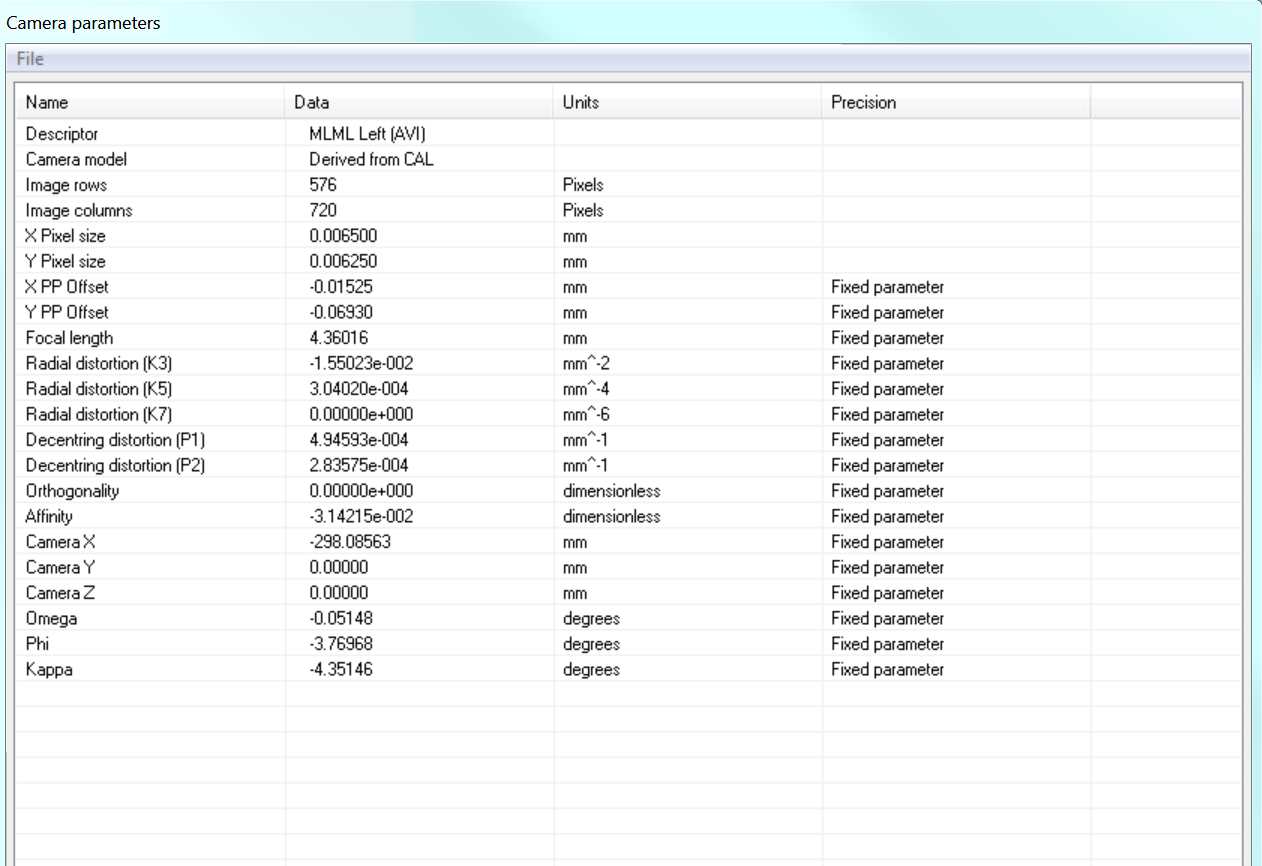
Obs: Dessa filer innehåller kalibrering mätningar för varje kamera (t.ex., pixelstorlek, bildförhållande, radiella distorsion, decentring distorsion, etc.) och används för att mäta fisk och beräkna avståndet-från-kamera (dvs, Z avstånd). - Definiera film sekvensen för den vänstra videofilen genom att navigera till 'Bild' > 'definiera film sekvens' och välja vänster kamera videofilen.
- Fyll vänster videofilen i mätning programvara genom att välja 'Bild' > 'Ladda bild'.
Obs: Var noga med att ”Lås” rutan är avmarkerad innan du laddar videofiler. Detta tillåter både videor laddas samtidigt. - Definiera film sekvens och belastning videofil för rätt video med hjälp av menyerna 'Stereo' > 'bild' > 'definiera film sekvens' och 'Stereo' > 'bild' > 'Ladda bild'.
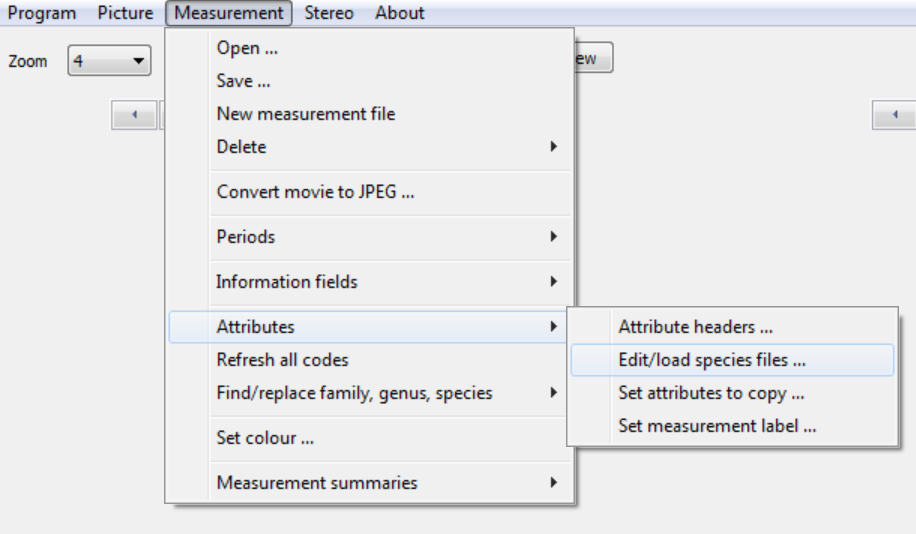
- Ladda listan arter genom att navigera till 'Mätning' > 'Attributen' > ' Redigera/Ladda arter fil'.
- Ange ID enkätdata under 'Fält' > 'Redigera värdet i fältet' och spara fil för att skapa en. EMObs projektet.
- Synkronisera videor med ljus blixt, handclap, Coordinated Universal Time (UTC) stämpel eller någon tid särskilda händelse som inträffar i både video.
- Om du använder UTC tidsstämpel, ram-steg framåt i den vänstra videon tills tidsstämpeln börjar en ny andra. Annan bildruta framåt tills ljus blixt eller handclap uppstår.
- Ram-steg rätt videon framåt tills tidsstämpeln matchar vänster videon exakt. Annan ram steg framåt tills det exakta ögonblicket ljus blixt eller handclap matchar den vänstra videon.
Obs: Det är viktigt att videor vara synkroniserade med samma ram. Video synkronisering bör kontrolleras med jämna mellanrum med video tidsstämpeln för att undvika kamera ram drift under analysen. En filmade hand clap skulle också kunna användas i början och slutet av videon för att testa denna rätt och vänster videor var synkroniseras med samma ram.
- Klicka på knappen ”Lås” för att säkerställa videor spela tillsammans och underhåll synkronisering.
2. generera punkten räknas och beräkna MaxN
Obs: Varje fisk markeras ursprungligen med en 2D peka till den lägsta möjliga taxonomisk upplösningen. Fisk med osäkra ID bör markeras för senare granskning.
- Vänta med att börja räkna fisk till slutet av en komplett kamera rotation för att säkerställa att en full 360 grader används. Även vänta tills sediment har rensat (allmänt < 1-2 min efter kontakt med botten).
- Så snart Lander startar dess första rotation, högerklicka om du vill definiera en ny provtagningsperiod: 'Perioddefinitionerna' > 'Lägg till ny Startperiod'. Ange första perioden namn som ”01” och klicka ”OK”.
- Som Lander roterar, börja märkning varje fisk som kommer in i ram med en 2D vänster kameran bara.
- Lägga till en utgångspunkt för 2D, högerklicka och välj 'Lägg till punkt' välja rätt namn. Etikett till den lägsta möjliga nivå för artsammansättningar, välja 'spp.' för okänd art och klicka på ”OK”.
- Fortsätta att markera varje ny fisk enligt steg 2.2.1 fram till dess rotation.
- Upprepa protokoll förfaranden 2.1-2.2 för varje ytterligare Lander rotation - att säkerställa att en ny period definieras i början av varje kamera rotation.
Obs: Arter ackumulering kurvor användes för att fastställa att åtta rotationer räckte, i genomsnitt att karakterisera fisk överflöd i den aktuella studien. Forskare bör överväga preliminära tester med ytterligare kamera rotationer, över längre blöt gånger, att karakterisera det optimala antalet kamera rotationer inom ett särskilt ekosystem. - Beräkna artspecifika räkningarna av individer observerats per kamera rotation.
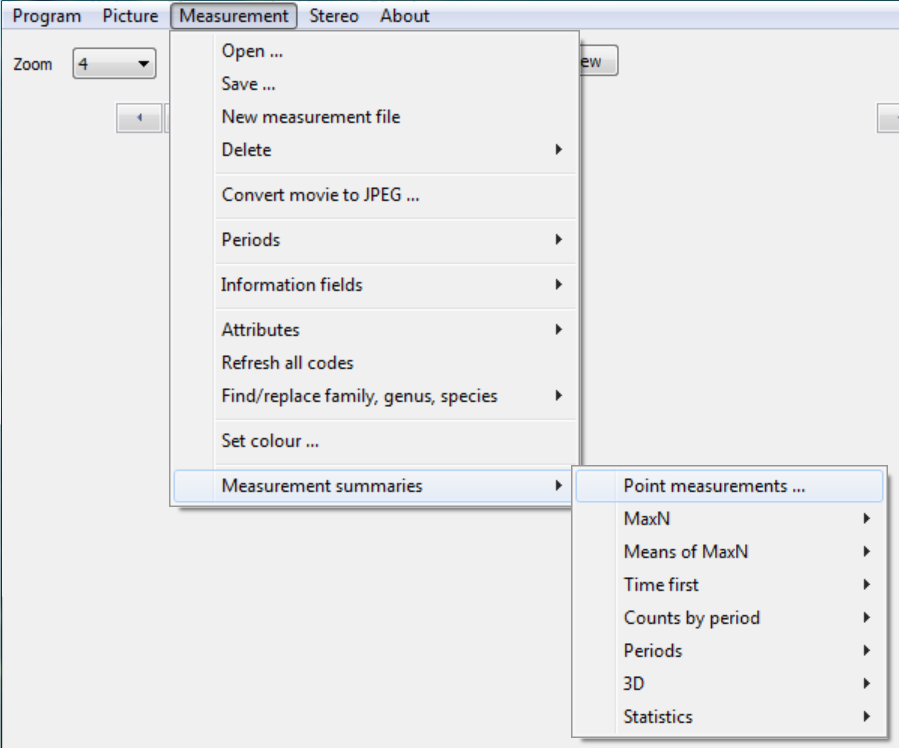
- Efter alla rotationer har räknats, Exportera 2D punkter genom att navigera till 'Mätning' > 'Mätning sammanfattningar' > 'Peka mätningar' och spara 2D punkter som a.txt fil.
- Öppna den Spara 2D.txt punkt filen som ett kalkylblad och skapa en pivottabell av arter vs. rotation nummer att sammanfatta räknas (tabell 1) genom att navigera till 'Insert' > 'Pivottabell'. Välj ”släkte och art” för 'Radetikett' och ”Period” för 'Kolumnetiketten'.
- Välj MaxN för varje art kamera rotation som har det största antalet individer av denna art (tabell 1).
- För fiskar identifieras endast till släkte, väljer du ett släkte-nivå MaxN baserat på den rotation som hade det största antalet individer identifierade arter i det särskilt släktet.
Obs: Detta steg bidrar till att undvika dubbelräkning individuella fiskar som var endast identifierbara till högre taxonomiska grupper (t.ex., endast till släkte eller familj). Till exempel i tabell 1, ' rotation 1 innehöll 10 oidentifierade Sebastes spp. och 33 medlemmar av släktet Sebastes identifierade arter, medan ' rotation 3' innehöll endast två oidentifierade Sebastes spp. och 43 medlemmar av släktet Sebastes identifierade arter. Därför ' rotation 3' skulle användas för MaxN räkningen av okänd Sebastes spp. På detta sätt det konservativa antagandet görs att 8 av de oidentifierade Sebastes spp. i ' rotation 1' identifierades i ' rotation 8'. - Om flera rotationer har samma MaxN räkningen för en viss art, Välj första rotation med MaxN för 3D punkt mätningar.
- För varje art, ta 3D mätningar av fisk i den rotation som MaxN inträffade.
- Använd de sparade 2D poäng som samlats in i steg 2.1-2.3 navigera till exakt samma fisk för 3D-mätning.
- Zooma in minst 4 X bättre identifiera spetsen av fisk nos och kanter av stjärtfenan fenor (figur 3).
Obs: Det kan vara nödvändigt att ram steg framåt eller bakåt för att hitta den bästa inriktningen av fisken för en 3D-mätning. 'Bästa' orientering är en där både nos och kanter av stjärtfenan fenorna syns i båda kamerorna. - Manuellt spetsen på nosen, sedan i utkanten av svansen i vänster kameran, klicka på Upprepa urvalet i samma ordning i rätt video.
- Välj rätt artbestämning från dropdown menyer som man gjort i 2.2.1.
- Om en 3D längdmätning inte är möjligt, för instans om huvud och svans av fisk inte är synliga i båda kamerorna, sedan markera en 3D punkt istället genom att vänsterklicka fisken samma ställning i både vänster och höger videor. Fyll i fält som innan och lämnar kommentaren ”undanta från längdmätning”.
Obs: MaxN kan uppstå på olika rotationer av kameror för olika arter. men för någon viss art, bör mätningar förekomma i en rotation endast (tabell 1).
- Efter avslutad 3D-mätningar för alla fiskar, exportera data as.txt fil för vidare analys.
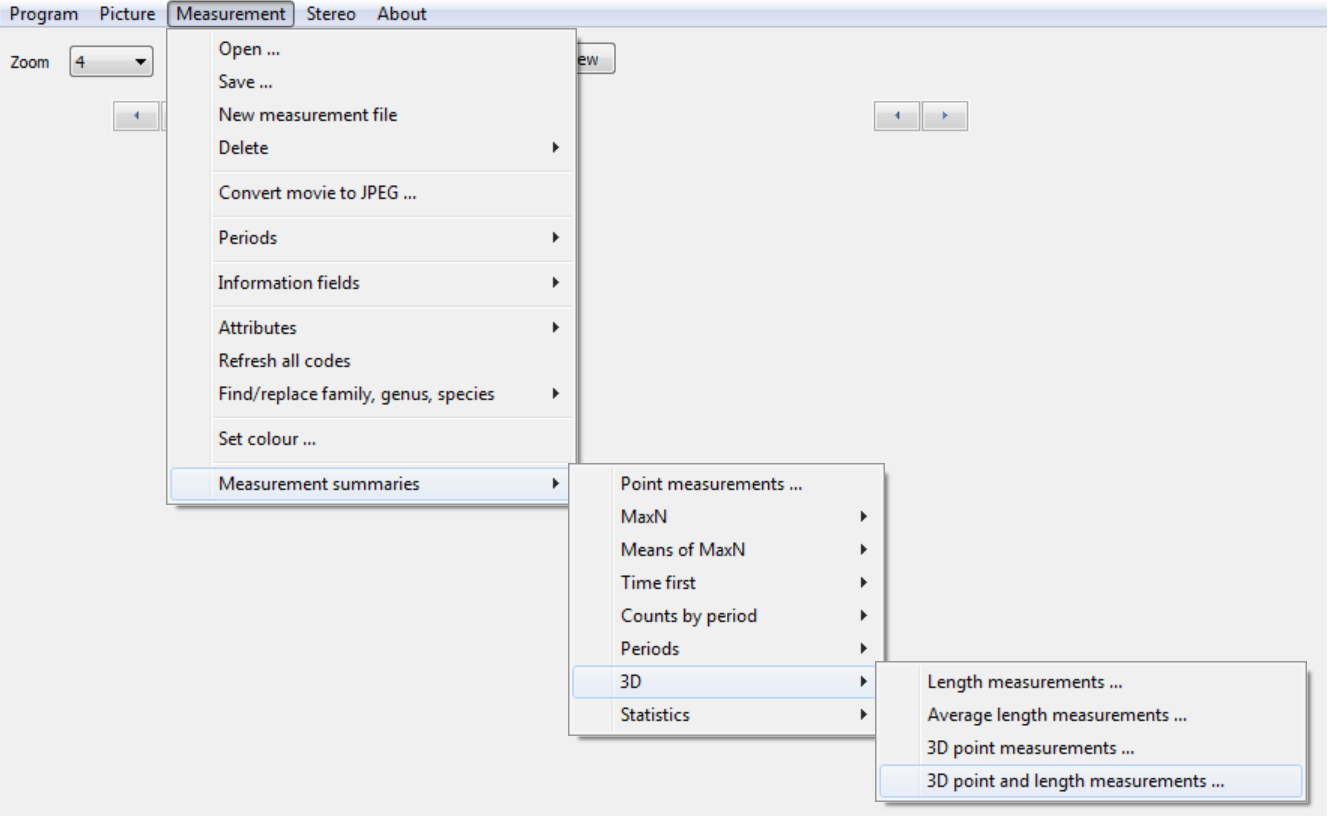
- Navigera till 'Mätning' > 'Mätning sammanfattningar' > '3D punkt och längd mätningar' och save.txt fil att exportera.
3. 95% Z avstånd förfarande för artspecifika undersökning områden
Obs: 95% Z avståndet är en uppskattning av den genomsnittliga avståndet en art på ett tillförlitligt sätt kunde identifieras i en viss studie medan exklusive fall av exceptionella förhållanden av vattnets klarhet eller belysning. Beräkningen tar hänsyn till de genomsnittliga oceanografiska förhållandena för en given studie och kommer att behöva beräknas om för varje ny studie.
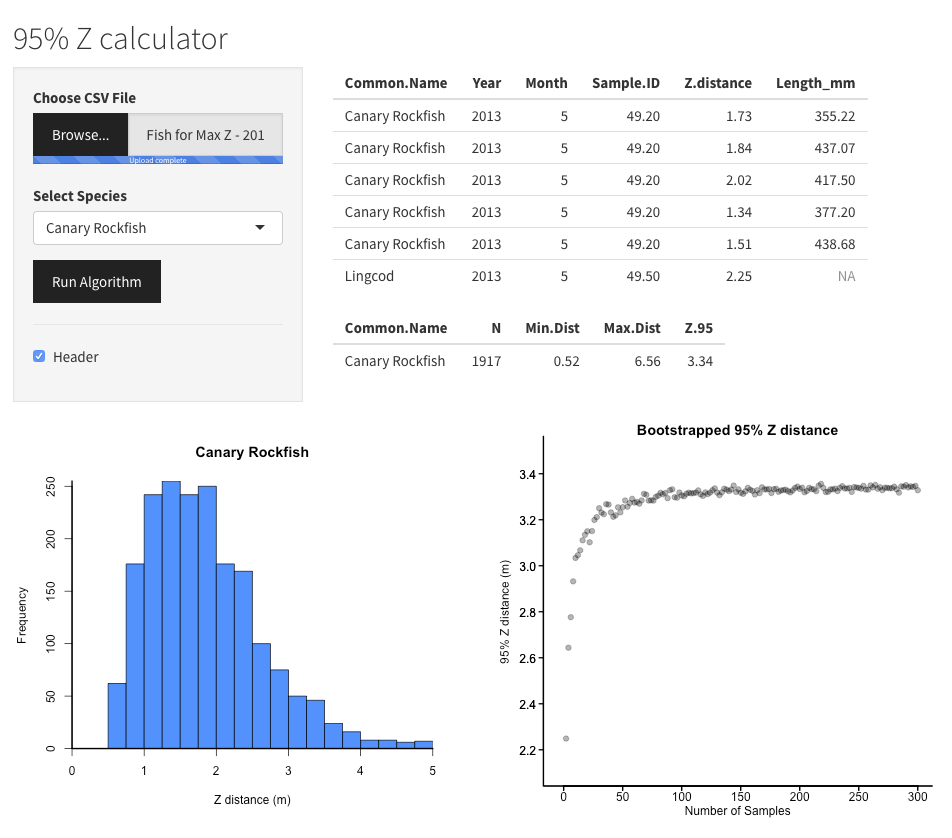
- Använda enkla bootstrapping för att avgöra om Urvalsstorleken är tillräckligt stor för att karakterisera distansera av tillförlitlig detektering för varje art.
- För varje prov storleksklass (t.ex., prov storlek lagerplatser av 5 fiskar), ta 1000 slumpvis drar av valda provstorleken med ersättning från ett urval av populationen beräkna medelvärdet 95% quantile av distanserar av dessa 1000 dragningar och rita den resulterande asymptotiska kurva. Se medföljande kod i kompletterande filer 1 & 2.
- Kontrollera att tillräckliga prover erhölls genom att jämföra faktiska urvalets storlek med den 95% Z avstånd asymptot med ökande stickprovsstorlek.
- Beräkna 95% Z avstånd som det 95% quantile av avstånd-från-kamera mätt för en art över alla undersökningar.
- Beräkna den effektiva arean tillfrågade för varje art som med hjälp av 95% Z-värdet.
Obs: När det gäller en roterande Lander, den 95% Z värdet representerar en undersökta sträng, yttre radie med innerradie bestäms av den fysiska installationen av verktyget och hur nära till basen kamerorna kan iaktta. Som Lander roterar, en 'donut' formade undersökning område bildas (figur 4).- Beräkna område tillfrågade som:

Obs: till exempel en relativt stora arter som Yelloweye Rockfish (Sebastes ruberrimus) hade 95% Z avstånd 3,3 m och en effektiv undersökning området 30,9 m2 per Lander distribution: 34,3 m2 (yttre cirkel) - 3,4 m2 (inner cirkel) = 30,9 m2 (total undersökning område).
- Beräkna område tillfrågade som:
- Använder det beräknade området tillfrågade (steg 3.3.1), konvertera enskilda arter räknas (MaxN) i densitet uppskattningar för varje visuell undersökning med hjälp av ekvation:

Obs: Ett liknande förfarande kan användas för att beräkna en volymetrisk densitet i stället för en ytdensitet; dock beskrivs att processen inte här.



Tabell 1: exempel MaxN sammanfattande tabell. Urvalet av MaxN för varje art demonstreras med röda och fet text. Observera att en konservativ MaxN för oidentifierade Sebastes spp. bestämdes av rotationen med den de flesta Sebastes identifierade arter (3 rotation). Även denna studie används åtta kamera rotationer, visas endast fyra rotationer i tabell 1 för enkelhet. Processen för att välja MaxN är identiska oavsett antalet rotationer.

Figur 1: Stereo video Lander. Viktigaste hårdvara är numrerade (1) 300 m navel, (2) två digitala videoinspelare (DVR) med flyttbara 32 GB lagring korten vattentät flaskan, (3) två LED lampor mata 3.000 lumen på en färgtemperatur på 5000 K och (4). två kameror med 620 TV linje (TVL) upplösning. Klicka här för att se en större version av denna siffra.

Figur 2: kalibrering kub (500 x 500 x 300 mm). Exempel på en kalibrering med en 'kalibrering cube' visas i två olika inriktningar: (A) höger sida av kuben trycks mot kameror och (B) i ansiktet på kuben är parallella i ansiktet av kameror. Röda prickar beteckna de referenspunkter som används i denna särskilt kalibreringsmetod och måste alltid identifieras i nummerordning. Klicka här för att se en större version av denna siffra.

Figur 3: 3D-mätning placeras på Sebastes miniatus. Spets i nos och slutet av svansen identifierades i varje kamera ram för stereo mätning. Klicka här för att se en större version av denna siffra.

Figur 4: område som övervakas av verktyget Lander. Tillfrågade av verktyget Lander-effektiva området var avgränsas av minst Z avstånd och 95% Z avståndet för varje art. Observera att detta område skapas en 'donut' formade undersökning volym runt om i Lander. Klicka här för att se en större version av denna siffra.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Mellan 2013 och 2014 genomförde vi 816 undersökningar med den roterande stereo-video Lander (figur 1) längs den centrala Kaliforniens kust och insamlade MaxN och 95% Z avstånd (figur 4) data på mer än 20 arter. Det fanns tydliga mönster i effektiv detekterbara spänna av arter observerats, sannolikt på grund av samspelet mellan arterna storlek, form och färg (figur 5). Exempelvis har den flaggan Rockfish (Sebastes rubrivinctus) tydliga ränder på sidorna möjliggör säker identifiering på större avstånd än andra arter av jämförbar storlek. Likaså Canary Rockfish (Sebastes pinniger) är relativt stora arbetsföra, men har en pigmentering som liknar andra arter, vilket gör det svårare att identifiera på avstånd (figur 5).
Vi använder två arter för att Visa beräkningarna av både MaxN och 95% Z avstånd värden: Pygmy Rockfish (Sebastes wilsoni) och Lingcod (O. elongatus). Den förstnämnda är en liten arbetsföra fisk som kan vara svårt att identifiera på avstånd; O. elongatus är relativt stor, har en distinkt form, och är lättare att identifiera. Från 2013-2014 samlades 1 191 mätningar för S. wilsoni och 1 222 mätningar för O. elongatus . Sedan den 95% quantiles av avstånd där dessa arter observerades: 95% Z avstånden var 2,65 m för S. wilsoni och 3,96 m för O. elongatus (figur 5) beräknades. Dessa 95% Z avstånd översätta till effektiv undersökning områdena 18,6 m2 och 46,0 m2 för S. wilsoni och O. elongatus, respektive. En enkel bootstrap analys bekräftat att tillräckligt prov storlekar erhölls för karaktärisering av 95% Z avstånd värden. För båda arterna, uppskattningen av 95% Z avstånd stabiliserad när större än 50 enkäter som innehåller dessa arter var urvalet, som ger starka bevis för att de valda stickprovsstorlekar var mer än tillräcklig att karakterisera det effektiva Lander prov området för dessa arter (figur 6).
MaxN räknas per undersökning omvandlades sedan till tätheter (antal fisk/m2). Vi använde densitet uppskattningar från de 816 undersökningarna för att testa hypotesen att Lingcod och Pygmy Rockfish skulle iakttas främst på hög relief livsmiljöer. För båda arterna, fanns det betydligt större densitet över höga och medelhöga lättnad jämfört med låg relief livsmiljöer (Kruskal-Wallis, p <<. 001; (Se figur 7). Dessa resultat överensstämde med tidigare rapporterade livsmiljö föreningar för båda arter15. Det fanns inga skillnader mellan medium och hög relief livsmiljö för någondera arten.
För att förstå hur den roterande Lander jämfört med traditionell stationär kamerasystem, uppskattade vi skillnader i densitet och variabilitet uppskattningar mellan en roterande och en simulerad stationära Lander. Vi utgått från en typisk stationär singel-kamera Lander skulle ha en 90-graders synfält. Den roterande Lander har en 60 graders synfält och kräver 5 sekunder av rotation för att slutföra en 90-graders vy. Använda 261 undersökningar, valt vi fisk observationsdata från de mellersta 5 sekunderna Lander rotationer för att upprätta MaxN. Densitet uppskattningar för den pseudo stationära Lander standardiserades med hjälp av reducerade verksamhetsområden täckning (dvs.cirka ¼ området av den roterande Lander). Skillnader i genomsnittlig densitet och variationskoefficient mellan roterande och pseudo stationära Landers utvärderades med Welch's t-test. Genomsnittliga tätheter erhålls genom roterande kameran var 18% större än den som uppnås med stationära kameror (Welch's t21,7, p = 0.081, figur 8A). Dessutom variationskoefficienten var 1,8 gånger större med stillastående kamera jämfört med roterande kameror (Welch's t15,1, p < 0,001, figur 8).

Figur 5 : Z avstånd observerats för utvalda arter. Röda vertikala staplar betecknar Z minimiavstånd (0.81 m från kameror) till vänster och 95% Z avstånd värdet till höger. Observera att detta utgör genomsnittliga effektiva området runt Lander för varje art. Klicka här för att se en större version av denna siffra.

Figur 6 : Starta Z avstånd värden. Startprogram för att öka stickprovsstorleken för (A) S. wilsoni och (B) O. elongatus observationer. Prov storlekar från 3-300 var starta 1000 gånger vardera för att beräkna genomsnittlig 95% Z avstånd och verifiera urvalsstorlekarna var tillräckliga. Observera att y-värdena varierar från 2,0-2,6 m för S. wilsoni och 2.6-4.0 m för O. elongatus. Klicka här för att se en större version av denna siffra.

Figur 7 : Habitat skillnader för två utvalda arter. Genomsnittliga tätheter (± SE) av (A) S. wilsoni och (B) O. elongatus mätt på låg, medium och hög relief rock livsmiljö. Klicka här för att se en större version av denna siffra.

Figur 8 : Skillnader mellan roterande och pseudo stationära landers. Båda uppskattningar av (A) menar densitet (fiskar/m2 ± SE) och (B) betyder coefficient of variation (CV) ± SE för 261 undersökningar presenteras. Klicka här för att se en större version av denna siffra.

Kompletterande Video 1: kalibrering verifiering. Kalibrering kan verifieras före användning i fältet genom att mäta mål av kända storlekar på olika avstånd. Vänligen klicka här för att se denna video. (Högerklicka för att ladda ner.)

Kompletterande Video 2: undervattens undersökning Footage. Vänligen klicka här för att se denna video. (Högerklicka för att ladda ner.)
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Traditionella MaxN måttet bygger på idén att räkna en garanterad minsta antal individer närvarande under en undersökning. Om ett visst antal fisk syns samtidigt i en enskild bildruta, det kan inte finnas något färre idag, men eftersom fisken är mobila och ojämnt fördelad, sannolikheten för att se alla individer samtidigt under en enskild bildruta är låg . Det är därför troligt att traditionella MaxN underskattar sant fisk överflöd16,17. Det har dessutom visat att traditionella MaxN kan visa icke-linjära negativt-partisk relationer med ökande fisk sammansättning16,18. Detta kan relateras till fenomenet med redskap mättnad whereby relativa överflöd index misslyckas att upptäcka sann ökar i överflöd19,20. Omvänt ett index med verkligt sjunkande fisk överflöd skenbar stabilitet har kallats 'hyperstability', och kan i slutändan leda till kraschen fisk populationer21,22. En färsk studie rapporterade att instabiliteten i MaxN kunde lindras genom att öka de undersökta synfält16. I denna studie blev förhållandet mellan MaxN och sant överflöd alltmer linjär när synfältet närmade sig 100% (dvs360 grader).
Resultaten från stationära kamera simuleringen visar kongruens med dessa tidigare resultat, och föreslår att MaxN värdet bättre kan karaktärisera fisk överflöd. Exempelvis reducerades den uppskatta genomsnittliga koefficienten för varians bland densitet uppskattningarna härrör från den roterande Lander jämfört med den pseudo stationära Lander. Detta är sannolikt på grund av att fisk är heterogent fördelat och att stationära kameror är mer sannolikt att 'Missa' fisken närvarande om Lander ansikten fel riktning. Roterande Landers maximera provtagning ansträngning genom lantmäteri full 360 grader runt verktyget och nettoeffekten är minskningar till både provtagning kostnader varians och en total ökning på statistiska kraften i studien. Framtida studier kunde bättre lösa problemet genom att direkt testa en roterande Lander med en separat stationära Lander i en parkopplad undersökning design. Likaså, det gick inte att direkt testa för förhållandet mellan MaxN och sant överflöd i denna studie, och framtida studier kan direkt testa detta med hjälp av antingen simulering eller kontrollerade miljöer, såsom skedde i Campbell (2015)16.
En möjlig kritik av den modifierade MaxN metoden är möjligheten att dubbla räkna personer. Eftersom Lander gjort ett helt varv per minut, och de bentiska arterna av intresse i ekosystem tenderar att vara relativt stillasittande och långsam flyttas under de flesta förhållanden, tror vi att risken för dubbelräkning var låg. Dessutom observerades fall där fisk skulle anlöpa eller lämna området under loppet av de åtta rotationer. Ytterligare försiktighetsåtgärder för att undvika dubbel räknar till exempel med rotation med det största antalet individer av ett visst släkte för att räkna oidentifierad art togs. Andra mått har föreslagits som index för fisk överflöd såsom menar Count; dock har dessa alltför visat att konsekvent underskatta sant överflöd medan öka variationsrikedomen bland densitet uppskattar16. MaxN rekommenderas därför som ett mer exakt mått på fisk överflöd. Medan vår modifierade MaxN metriska inte garanterar en konservativ uppskattning av absolut minsta antal individer, är vi överlag övertygade om att detta modifierade MaxN tillvägagångssätt ger bättre uppskattningar av sanna fisk överflöd, och att alltför räknande fisk är av relativt låg oro.
Många sida-visning video-transekt undersökningar används en fast transekt bredd att uppskatta densiteten för alla arter. På samma sätt, en metod för att använda stereo-video Landers skulle vara att använda en maximal distans-från-kamera att beräkna både område tillfrågade och fisk densitet. Båda kan leda till en underskattning av arter som endast är tillförlitligt identifierbara för mindre avstånd än de fasta transekt bredd uppskattningar23. Avståndet som en art identifieras tillförlitligt orsakas av samspelet mellan faktorer som storlek, form, färg mönster, fisk beteende, samt miljöfaktorer. 95% Z avstånd metoden är särskilt fördelaktiga i att det står för samverkan mellan alla dessa faktorer samtidigt. O. elongatus var exempelvis de arter som vi kan identifiera att största avståndet, sannolikt till följd av dess distinkta, stora, elongate kroppsform och beteendemässiga tendens att lägga på havsbotten. Rosiga Rockfish (Sebastes rosaceus) hade en av de kortaste Z avstånd, sannolikt eftersom, som en medlem av Sebastomus undersläktet, det har flera kongener som ser väldigt lika och är svårt att skilja på ökad avstånd. Genom att tillåta artspecifika områden övervakas av Lander, kanske vi mer exakt uppskatta fisk överflöd. Metoden bootstrap prov storlek kontroll är enkel och lätt genomförs i andra undersökningar, och vi anser att metoden för 95% Z avstånd kan anpassas ytterligare för att rymma linje transekt undersökningens utformning. 95% Z avstånd skulle då utgöra ett horisontellt avstånd av tillförlitlig detektering för arter som observerats med dränkbar eller fjärrstyrda fordon (ROV) verktyg. I framtiden kan forskare undersöka med hjälp av avstånd provtagning teori till modell densiteten som funktion av upptäcktsrisken med avstånd23,24.
Eftersom det finns ökad användning av no-ta reserver i fiskeri management25,26,27, finns det ett ökande behov av icke-utvinnings urvalsmetoder, särskilt i djuphavsmiljöer som inte är tillgängliga för dykare undersökningar. Det är dock också nödvändigt att dessa tekniker ger korrekt, tillförlitlig data på fisk längd, överflöd, och artsammansättning. Video Landers är ett relativt nytt övervakningsverktyg som har en låg kostnad, kan manövreras på relativt små fartyg möjligheter och är logistiskt enklare att använda än ROVs och undervattensfarkoster samtidigt kräver färre och mindre kompetent personal. Medan inte diskuteras i dessa metoder, klarar stereo-kamera Landers av korrekt längd mätningar med fel mindre än 2%. Dessutom kan Landers snabbt distribueras över stora geografiska områden, ökad Statistisk inferens. Vi förväntar oss intresset för video övervakning verktyg för att öka som forskning byråer look att strama budgetar och mer effektivt sprida provtagning ansträngning. Vår ändring av MaxN och 95% Z avstånd bör övervägas i framtiden ekologiska studier utnyttjar roterande video Landers.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Författarna har ingenting att avslöja
Acknowledgments
Detta arbete finansierades av The Nature Conservancy och privata donatorer, resurser Legacy fonden Foundation, Gordon och Betty Moore Foundation, Environmental Defense Fund, Kalifornien Sea Grant Program, NMFS National Cooperative Research Program och en NOAA Saltonstall-Kennedy bidrag nr 13-SWR-008. Marina tillämpad forskning och utforskning (Dirk Rosen, Rick Botman, Andy Lauerman och David Jefferies) utvecklas, konstruerad och underhålls verktyget video Lander. Vi tackar Jim Seager och SeaGIS™ programvara för teknisk support. Kapten och kommersiella fiskare Tim Maricich och besättningen ombord F/V Donna Kathleen tillhandahålls stöd i Distribuera Lander från 2012-2015. Tack till alla som deltog i video datainsamling eller analys (Anne Tagini, Donna Kline, Lt. Amber Payne, Bryon Downey, Marisa Ponte, Rebecca Miller, Matt Merrifield, Walter Heady, Steve Rienecke, EJ Dick och John Field).
Materials
| Name | Company | Catalog Number | Comments |
| calibration cube | SeaGIS | http://www.seagis.com.au/hardware.html | 1000x1000x500 mm is the preferred dimensions. Other methods of calibration are available. |
| CAL calibration software | SeaGIS | http://www.seagis.com.au/bundle.html | |
| EventMeasure stereo measurement software | SeaGIS | http://www.seagis.com.au/event.html | |
| Statistical software | R Core Team 2017 (v. 3.4.0) | Bootstrapping code can be found: https://github.com/rfields2017/JoVE-Bootstrap-Function | |
| Spreadsheet Software | Microsoft Excel | ||
| 2 waterproof cameras | Deep Sea Power and Light | HD quality preferred | |
| 2 depth rated, waterproof lights | Deep Sea Power and Light : 3000 lumen LED with 5000k color temperature | ||
| DVR recorder | Stack LTD DVR | ||
| standard PC | Windows 10 preferred OS | ||
| rotating Lander platform | Marine Applied Research and Engineering (MARE) |
References
- Love, M. S., Yoklavich, M. M., Thorsteinson, L. K. The Rockfishes of the Northeast Pacific. , University of California Press. Berkley. (2002).
- Laidig, T. E., Watters, D. L., Yoklavich, M. M. Demersal fish and habitat associations from visual surveys on the central California shelf. Estuar. Coast. Shelf Sci. 83 (4), 629-637 (2009).
- Anderson, T. J., Yoklavich, M. M. Multiscale habitat associations of deepwater demersal fishes off central California. Fish. Bull. 105 (2), 168-179 (2007).
- Yoklavich, M. M., Cailliet, G. M., Sullivan, D. E., Lea, R. N., Love, M. S. Habitat associations deep-water rockfishes a submarine canyon an example of a natural refuge. Fish. Bull. 98 (3), 625-641 (2000).
- Status of the Pacific Coast Groundfish Fishery, Stock Assessment and Fishery Evaluation. , Pacific Fishery Management Council. Portland, OR. (2016).
- Cappo, M., Harvey, E., Malcolm, H., Speare, P. Potential of video techniques to monitor diversity, abundance and size of fish in studies of marine protected areas. Aquatic protected areas- What works best and how do we know. Beumer, J. P., Grant, A., Smith, D. C. , Proc. World Congr. on Aquat Protected Areas. Australian Soc. for Fish Bio. North Beach, Western Australia. 455-464 (2003).
- McLean, D. L., Green, M., Harvey, E. S., Williams, A., Daley, R., Graham, K. J. Comparison of baited longlines and baited underwater cameras for assessing the composition of continental slope deepwater fish assemblages off southeast Australia. Deep-Sea Research Part I: Oceanographic Research Papers. 98, 10-20 (2015).
- Parker, D., Winker, H., et al. Insights from baited video sampling of temperate reef fishes: How biased are angling surveys. Fish. Res. 179, 191-201 (2016).
- Boutros, N., Shortis, M. R., Harvey, E. S. A comparison of calibration methods and system configurations of underwater stereo-video systems for applications in marine ecology. Limnol. Oceanogr. Methodss. 13 (5), 224-236 (2015).
- Harvey, E. S., Cappo, M., Butler, J. J., Hall, N., Kendrick, G. A. Bait attraction affects the performance of remote underwater video stations in assessment of demersal fish community structure. Mar. Ecol. Prog. Ser. 350, 245-254 (2007).
- Watson, J. L., Huntington, B. E. Assessing the performance of a cost-effective video lander for estimating relative abundance and diversity of nearshore fish assemblages. J. Exp. Mar. Bio. Ecol. 483, 104-111 (2016).
- Easton, R. R., Heppell, S. S., Hannah, R. W. Quantification of Habitat and Community Relationships among Nearshore Temperate Fishes Through Analysis of Drop Camera Video. Mar. Coast. Fish. 7 (1), 87-102 (2015).
- Hannah, R. W., Blume, M. T. O. Tests of an experimental unbaited video lander as a marine fish survey tool for high-relief deepwater rocky reefs. J. Exp. Mar. Bio. Ecol. 430, 1-9 (2012).
- Starr, R. M., Gleason, M. G., et al. Targeting Abundant Fish Stocks while Avoiding Overfished Species: Video and Fishing Surveys to Inform Management after Long-Term Fishery Closures. Plos One. 11 (12), 0168645 (2016).
- Love, M. S. Certainly more than you want to know about the fishes of the Pacific Coast: a postmodern experience. , Really Big Press. Santa Barbara, CA. (2011).
- Campbell, M. D., Pollack, A. G., Gledhill, C. T., Switzer, T. S., DeVries, D. A. Comparison of relative abundance indices calculated from two methods of generating video count data. Fish. Res. 170, 125-133 (2015).
- Cappo, M., Speare, P., De'ath, G. Comparison of baited remote underwater video stations (BRUVS) and prawn (shrimp) trawls for assessments of fish biodiversity in inter-reefal areas of the Great Barrier Reef Marine Park. J. Exp. Mar. Bio. Ecol. 302 (2), 123-152 (2004).
- Schobernd, Z. H., Bacheler, N. M., Conn, P. B., Trenkel, V. Examining the utility of alternative video monitoring metrics for indexing reef fish abundance. Can. Jour. Fish. Aquat. Sci. 71 (3), 464-471 (2014).
- Hansen, M. J., Schorfhaar, R. G., Selgeby, J. H. Gill-Net Saturation by Lake Trout in Michigan Waters of Lake Superior. North Am. J. Fish. Manag. 18 (4), 847-853 (1998).
- Dauk, P. C., Schwarz, C. J. Catch estimation in the presence of declining catch rate due to gear saturation. Biometrics. 57 (1), 287-293 (2001).
- Hilborn, R., Walters, C. J. Quantitative Fisheries Stock Assessment Choice, Dynamics and uncertainty. , Springer. Dordrecht. (1992).
- Erisman, B. E., Allen, L. G., Claisse, J. T., Pondella, D. J., Miller, E. F., Murray, J. H. The illusion of plenty: hyperstability masks collapses in two recreational fisheries that target fish spawning aggregations. Can. Jour. Fish. Aquat. Sci. 68, 1705-1716 (2011).
- Buckland, S. T., Anderson, D. R., Burnham, K. P., Laake, J. L. Distance Sampling: Estimating abundance of biological populations. , Chapman and Hill. London. (1993).
- Ronconi, R. A., Burger, A. E. Estimating seabird densities from vessel transects: Distance sampling and implications for strip transects. Aquat. Bio. 4 (3), 297-309 (2008).
- Caselle, J. E., Rassweiler, A., Hamilton, S. L., Warner, R. R. Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected areas Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected. Nat. Publ. Gr. , 1-14 (2015).
- Starr, R. M., Wendt, D. E., et al. Variation in Responses of Fishes across Multiple Reserves within a Network of Marine Protected Areas in Temperate Waters. Plos One. 10 (3), 0118502 (2015).
- Lester, S., Halpern, B., et al. Biological effects within no-take marine reserves: a global synthesis. Mar. Ecol. Prog. Ser. 384, 33-46 (2009).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}