

Summary
Beschrijven we een nieuwe methode voor het tellen van de vissen, en het schatten van de relatieve overvloed (MaxN) en de dichtheid van de vissen met behulp van roterende stereo-video camerasystemen. We laten ook zien hoe met camera (Z afstand) afstand schatten soortspecifieke detecteerbaarheid.
Abstract
Het gebruik van systemen van de videocamera in ecologische studies van vis blijft tractie te krijgen als een levensvatbare, niet-extractieve methode van meten vis lengtes en schatten vis overvloed. Wij ontwikkeld en geïmplementeerd een roterende stereo-videocamera instrument dat betrekking heeft op een volledige 360 graden van steekproeven, die bemonstering inspanning ten opzichte van stationaire cameragereedschappen maximaliseert. Een aantal studies hebben gedetailleerde het vermogen van statische, stereo-camera systemen voor hoogst nauwkeurige en precieze metingen van vis; de nadruk ligt hier was op de ontwikkeling van de methodologische benaderingen te kwantificeren van de dichtheid van de vissen met behulp van roterende camerasystemen. De eerste benadering was het ontwikkelen van een wijziging van de metrische MaxN, die meestal een conservatieve telling van het minimum aantal vissen is waargenomen op een bepaalde camera enquête. We definiëren de MaxN om het maximale aantal vissen waargenomen in een gegeven rotatie van het camerasysteem. Als voorzorgsmaatregelen worden genomen ter voorkoming dubbeltellingen, kan deze methode voor MaxN ware overvloed nauwkeuriger weerspiegelen dan die verkregen met een vaste camera. Ten tweede, omdat stereo-video vissen worden toegewezen in de driedimensionale ruimte kunt, nauwkeurige schattingen van de afstand van de camera kunnen worden verkregen voor elke vis. Door hand het 95%-percentiel van de waargenomen afstand van camera tot stand soortspecifieke gebieden ondervraagde, account we voor verschillen in detecteerbaarheid tussen soorten terwijl het vermijden van de ramingen van de dichtheid met behulp van de maximale afstand een soort was verdunning waargenomen. Boekhouding voor dit bereik van detecteerbaarheid is cruciaal voor het vis abundanties nauwkeurig te schatten. Deze methodologie zal vergemakkelijken de integratie van draaiende werktuigen van de stereo-video in zowel toegepaste wetenschap en beheer contexten.
Introduction
Langs de US Pacific Coast zijn veel van de belangrijke commerciële en recreatieve groundfish visserij (bijvoorbeeldde complexe roodbaars (Sebastes spp.) en de Ophiodon elongatus (Ophiodon elongatus)) soorten sterk geassocieerd met hoog-reliëf, harde-onderkant habitats1,2,3,4,5. De daling van de stereo-video camera's zijn een aantrekkelijke niet-extractieve tool om te gebruiken in rotsachtige habitats als gevolg van de relatieve gemak en eenvoud van de operatie. Een verscheidenheid van stereo-video camerasystemen zijn ontwikkeld en geïmplementeerd in het zuidelijk halfrond, ondiep water ecosystemen6,7,8,9,10, en video drop-camera's hebben onlangs, tractie opgedaan als beheersinstrument voor diep water rotsachtig rif omgeving langs de Pacific Coast11,12,13. Wij willen deze bestaande stereo-camera ontwerpen met behulp van een stereo-video-camerasysteem (hierna te noemen de "Lander") te karakteriseren efficiënter vispopulaties in hoog-reliëf seafloors langs de centrale kust van de Stille Oceaan (Zie tabel van wijzigen Materialen). De Lander gebruikt was anders dan de bestaande videosystemen omdat camera's waren gemonteerd op een centraal roterende bar, waardoor voor een volledige 360° van de dekking van de zeebodem bij de daling van de locatie14. De Lander voltooid één volledige omwenteling per minuut, die konden we snel karakteriseren de omvang en de samenstelling van de Gemeenschap van een gebied en het bereiken van hetzelfde niveau van statistisch onderscheidingsvermogen met minder Lander-implementaties. (Zie Starr (2016),14 voor meer details op de specifieke kenmerken van de Lander-configuratie). Voorafgaande proeven in de studie-systeem voorgesteld dat acht rotaties van de camera's in onze enquêtes volstonden om te karakteriseren soorten overvloed en rijkdom. Deze bepaling werd gemaakt door een observatie van afnemende meeropbrengsten in soorten overvloed en dichtheid van de vissen over langere druppels. Het is raadzaam dat een pilot-studie met inbegrip van langere weken tijden worden uitgevoerd in een nieuw systeem om de optimale weken tijd voor een soort van bepaalde ecosystemen/studie te bepalen.
Met behulp van gepaarde stereo camera's, zowel totaal enquête gebied en absolute vis dichtheid kan worden berekend voor elke video enquête; echter noodzakelijk het gebruik van camera's draaien de wijziging van traditionele vis graaf metrics. Stationaire monitor systemen gebruiken meestal "MaxN" als een conservatieve graaf van vissen op een implementatie6,10. Traditionele MaxN wordt het maximum aantal vis van een bepaalde samen in één video frame, teneinde dubbeltelling van een vis die heeft verliet en keerde terug naar frame waargenomen soorten beschreven. MaxN is daarom een schatting van het minimum aantal vissen bekend om aanwezig te zijn geweest en waar vis overvloed6,10mag onderschatten. De metric van de MaxN werd opnieuw gedefinieerd om te vertegenwoordigen het grootste aantal vissen gezien in elke volledige omwenteling van de camera's.
De tweede wijziging van eerdere stereo video methoden was ter verantwoording voor het feit dat soorten van verschillende grootte, kleur, en shapes hebben verschillende maximale afstanden van betrouwbare identificatie. Bijvoorbeeld grote soorten zoals O. elongatus hebben een verschillende langwerpige vorm en op betrouwbare wijze kan worden geïdentificeerd op veel grotere afstanden in vergelijking met kleine en cryptische soorten zoals de Squarespot roodbaars (Sebastes hopkinsi). Deze verschillende maximale bereiken van detecteerbaarheid wijzigen het daadwerkelijke gebied bemonsterd door de Lander voor elke soort Omdat de stereo camera's laten toe om elke vis in de driedimensionale ruimte met een hoge graad van nauwkeurigheid, kan men bepalen de afstand van de camera's die elke vis was (dat wil zeggen, de "Z afstand", genoemd naar de "z" dat is gemeten loodrecht op de rechte lijn getrokken tussen de camera's). Voor elke soort de afstand waarbinnen 95% van alle individuen (hierna "95% Z afstand") werden waargenomen werd beschouwd als de straal van de enquête gebied, en werd gebruikt voor het berekenen van de totale oppervlakte ondervraagde. Naast soortspecifieke kenmerken, zal identificeerbaarheid worden beïnvloed door omgevingsfactoren zoals troebelheid van het water. Omdat deze factoren in tijd en ruimte variëren kunnen, is het belangrijk dat u de statistiek 95% Z alleen in totaal. Terwijl het zal zeer nauwkeurige voor grote monsters, kan ieder een individueel onderzoek verschillen in onderzochte gebied.
Het protocol hieronder geeft advies over hoe u kunt maken en gebruiken van deze statistieken. Hoewel de focus was te karakteriseren diepzee rotsachtige habitat langs de kust van de Stille Oceaan, geldt de methodologie beschreven voor gemodificeerde MaxN telling gemakkelijk voor een roterende drop-camera systeem. Het aantal rotaties van de camera die nodig zijn voor het karakteriseren van vispopulaties zal afhangen van lokale ecosysteem dynamiek, maar de conceptualisering van de gemodificeerde MaxN zal hetzelfde blijven. Evenzo overwegende dat we 3D fotogrammetrische software gebruikt voor het analyseren van stereo video, worden de hier beschreven technieken gemakkelijk toegepast op softwareplatformen, zolang de precieze locatie van vis in de driedimensionale ruimte mogelijk is. Bovendien, kan de aanpak van de toepassing van een afstand van 95% Z-waarde worden overwogen in de toekomst studies met stereo-camera's ter verantwoording voor soortspecifieke bereiken van detecteerbaarheid en vis overvloed meer precies kunnen worden berekend.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
Opmerking: De Screenshots van software stappen zijn opgenomen als Aanvullende bestanden. Houd er rekening mee dat de stappen van de software hieronder beschreven specifiek voor de gekozen software zijn (Zie de Tabel van de materialen). De algemene aanpak kan worden uitgebreid tot elke stereo softwareplatform.
1. Prepareer Stereo-cameralengte analyse
Opmerking: Kalibratie met behulp van een kalibratie-kubus wordt aanbevolen. Een kubus kalibratie is een driedimensionaal aluminium-frame met juist gepositioneerd reflecterende stippen op het oppervlak. Wanneer gebruikt in combinatie met kalibratiesoftware, leidt een kalibratie-kubus tot grotere precisie en nauwkeurigheid dan dambord benaderingen9.
- Kalibreren van de Lander-camera's met stereo-kalibratiesoftware (Figuur 1 en Figuur 2; Zie Tabel van materialen voor een aanbeveling van de software).
Opmerking: Kalibratie kan worden geverifieerd voor gebruik in het veld door het meten van de doelstellingen van bekende grootte op variërende afstanden (Zie aanvullende Video 1). Gemiddelde meetfout voor een doelstelling van 50 cm op een afstand van 3 m (of minder) moeten binnen 2% van de lengte van bekende doel. Merk ook op dat een bepaald kalibratie alleen geldig is als camera posities niet ten opzichte van elkaar veranderen. Het is van cruciaal belang om te verzorgen en te voorkomen dat onbedoelde gedrang van de camera's totdat alle bemonstering is verricht. - Veldgegevens met behulp van de gekalibreerde Lander (Figuur 1, aanvullende Video 2) verzamelen.
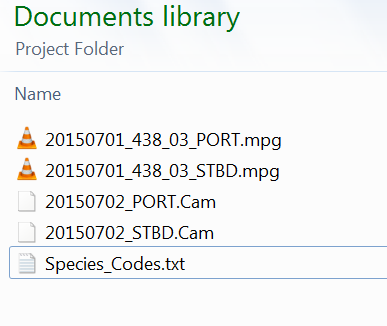
- Nadat veld-onderzoek afgerond is, maakt u een nieuwe projectmap met zowel video als kalibratie bestanden.
Opmerking: In elk project map er moet minimaal vijf bestanden: links en rechts ". Cam"kalibratie-bestanden, de links en rechts video bestanden (. MP4 of. AVI-formaat alleen), en de lijst van de soorten (.txt formaat). - In de stereo meting software, start een nieuw project van de meting en passende video- en kalibratie-bestanden laadt.
Opmerking: Screenshots van alle stappen van de software zijn beschikbaar onder de Aanvullende bestanden.- Navigeer naar 'Meting' > 'Nieuwe meting-bestand'.
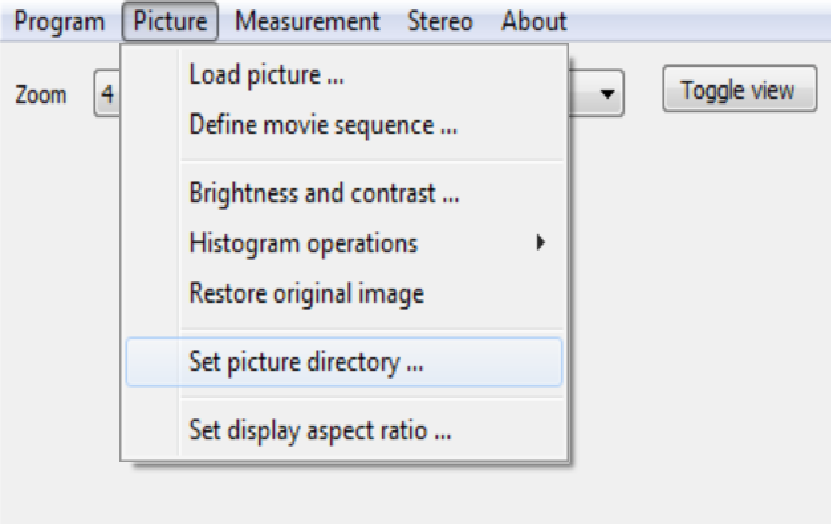
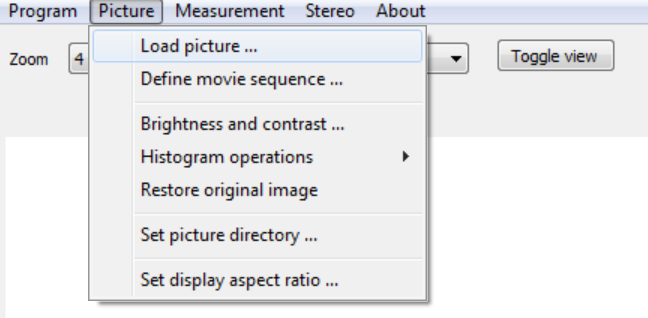
- De foto-map ingesteld door te navigeren naar 'Beeld' > 'Set foto directory', en kies de map waarin alle projectbestanden.
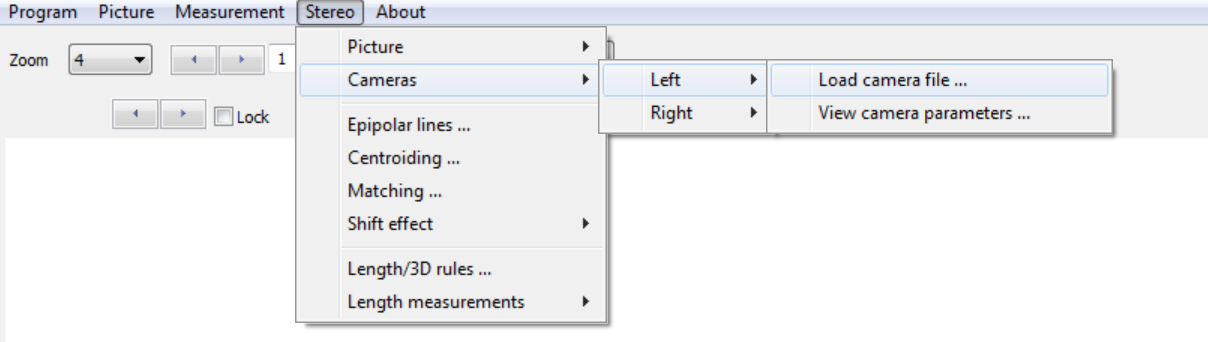
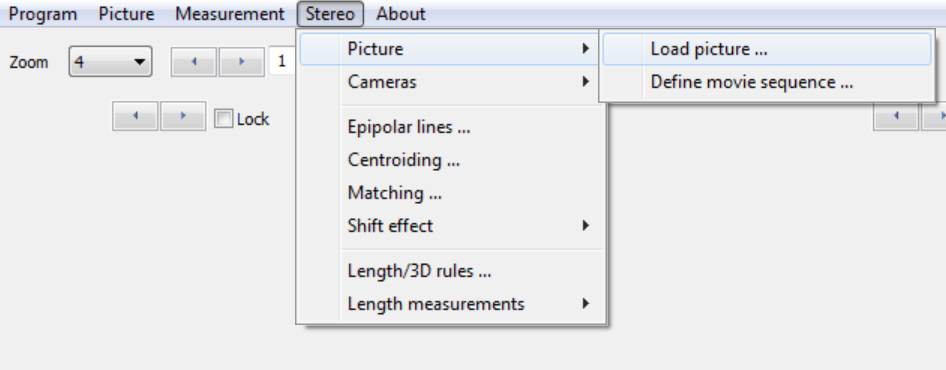
- Laden van de linker camera ". Cam"bestand door te navigeren naar 'Stereo' > 'Camera's ' > 'Left' > 'Load camera file' en selecteer het juiste bestand.
- Herhaal stap 1.4.3 te laden van de juiste camera ". Cam"bestand
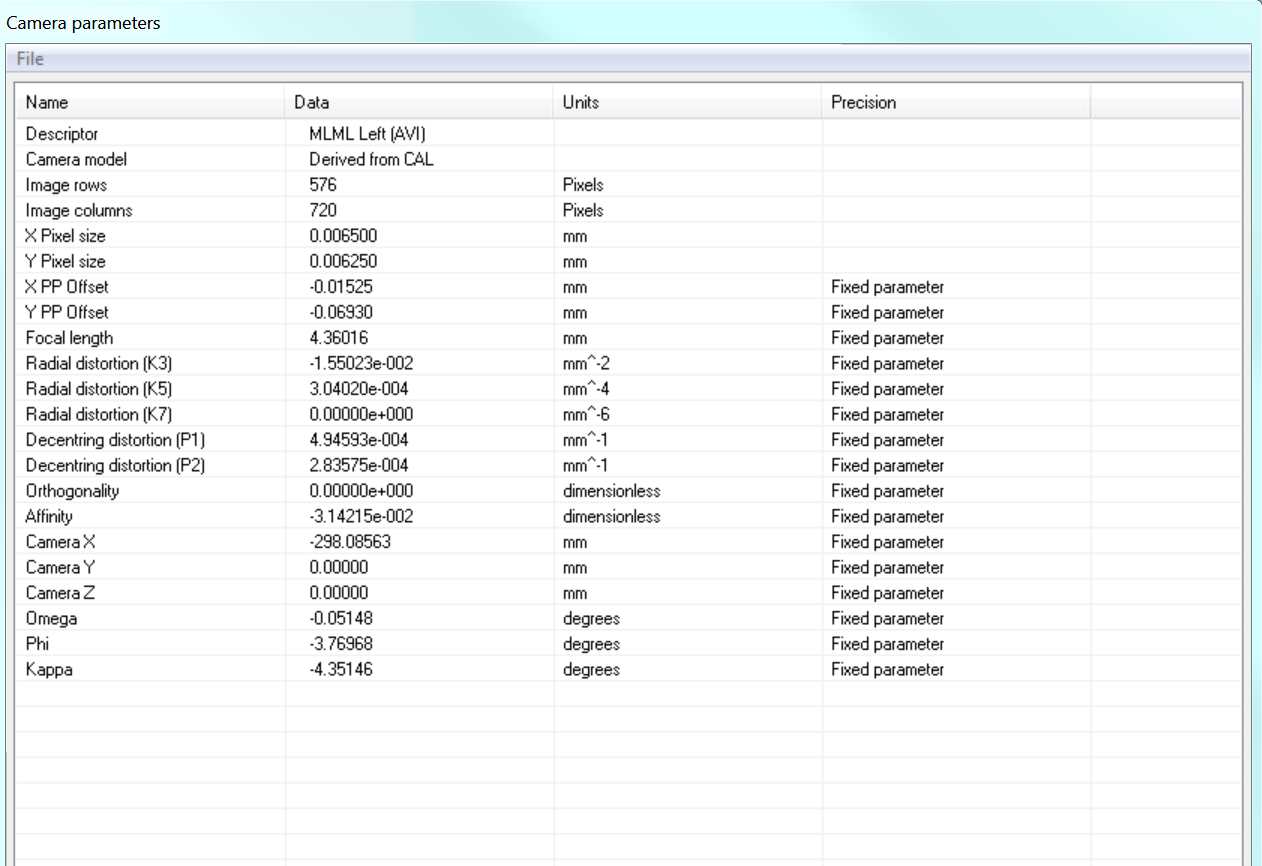
Opmerking: Deze bestanden bevatten kalibratie metingen voor elke camera (bijvoorbeeld, pixelgrootte, hoogte-breedteverhouding, radiale vervorming, decentring vervorming, etc.) en worden gebruikt voor het meten van vis en berekenen van afstand-uit-camera (dat wil zeggen, Z afstand). - De film reeks definiëren voor het linker video bestand door te navigeren naar 'Beeld' > 'film reeks definiëren' en de linker camera video bestand te selecteren.
- Het linker videobestand in meting software laadt door het selecteren van 'Picture' > 'afbeelding laden'.
Opmerking: Zorg ervoor dat het vak 'Vergrendelen' aangevinkt is voor videobestanden laden. Hierdoor kunnen zowel video's worden geladen tegelijkertijd. - Bepalen van de volgorde en laden video filmbestand voor de juiste video met behulp van de menu's 'Stereo' > 'foto' > 'film reeks definiëren' en 'Stereo' > 'foto' > 'afbeelding laden'.
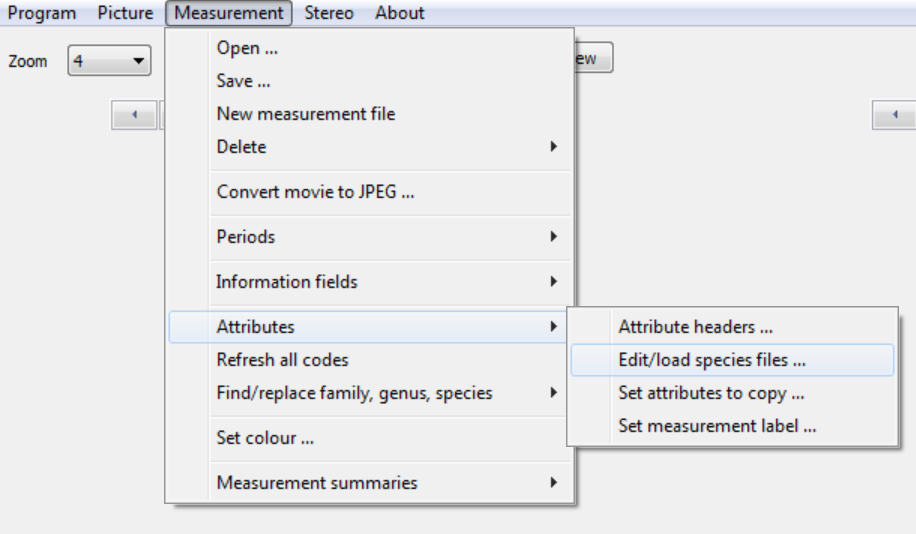
- Laden van de lijst van de soorten door te navigeren naar 'Meting' > 'Kenmerken' > ' bewerken/load soorten file'.
- Enquête-ID invoeren onder 'Informatievelden' > 'Veldwaarde bewerken' en sla bestand op maken een. EMObs project.
- De video's met behulp van lichte flash, handclap, Coordinated Universal Time (UTC) stempel of enige tijd specifieke gebeurtenis die zich in beide video's voordoet te synchroniseren.
- Als UTC-tijd-stempel, frame-stap voorwaarts in de linker video tot het tijdstempel begint een nieuwe tweede. Anders frame vooruit tot lichte flash of handclap optreedt.
- Frame-stap de juiste video naar voren tot het tijdstempel precies overeenkomen met de linker video. Anders frame stap voorwaarts totdat het precieze tijdstip de lichte flash of handclap overeenkomt met de linker video.
Opmerking: Het is belangrijk dat video's worden gesynchroniseerd naar hetzelfde frame. Video synchronisatie moet worden gecontroleerd periodiek met behulp van de tijdstempel van de video om te voorkomen dat de camera frame drift tijdens de analyse. Een gefilmde hand-klap kan ook worden gebruikt aan het begin en einde van de video om te testen dat rechts en links video's werden gesynchroniseerd met hetzelfde frame.
- Klik op de "Lock" knop zodat de video's spelen samen en handhaven van de synchronisatie.
2. het genereren van de graven van de punt en MaxN berekenen
Opmerking: Elke vis wordt in eerste instantie gekenmerkt met een 2D point to de laagste mogelijke taxonomische resolutie. Vis met onzekere ID moet worden gemarkeerd voor later kunt bekijken.
- Wachten om te beginnen met het tellen van vis tot het einde van een compleet camera rotatie om ervoor te zorgen dat een volledige 360 graden wordt gebruikt. Ook wachten tot sediment heeft gewist (over het algemeen < 1-2 min na contact met de bodem).
- Zodra de Lander de eerste rotatie begint, klik met de rechtermuisknop als u wilt definiëren een nieuwe bemonsteringsperiode: 'Periode definities' > 'Toevoegen nieuwe start periode'. Voer de naam van de eerste periode als "01" en klik "OK".
- Als de Lander draait, beginnen elke vis die wordt geleverd in frame met een 2D punt met behulp van de linker camera alleen markering.
- Om toe te voegen een 2D punt, klik met de rechtermuisknop, selecteer 'Toevoegen Wijs' en kies de juiste soortnaam. Label tot het laagst mogelijke taxonomische niveau, 'spp.' voor onbekende soorten en klik op "OK" selecteren.
- Door met het markeren van elke nieuwe vis volgens stap 2.2.1 tot en met de sluiting van de rotatie.
- Herhaal protocol procedures 2.1-2.2 voor elke extra Lander rotatie - ervoor te zorgen dat een nieuwe periode aan het begin van elke camera rotatie is gedefinieerd.
Opmerking: Soorten accumulatie krommen werden gebruikt om te bepalen dat acht rotaties, gemiddeld, volstonden te karakteriseren vis overvloed in de huidige studie. Onderzoekers moeten overwegen uitvoeren van voorafgaande proeven met extra camera rotaties, over langere weken tijden, te karakteriseren het optimale aantal rotaties van de camera binnen een bepaalde ecosysteem. - Bereken soortspecifieke graven van individuen waargenomen per camera rotatie.
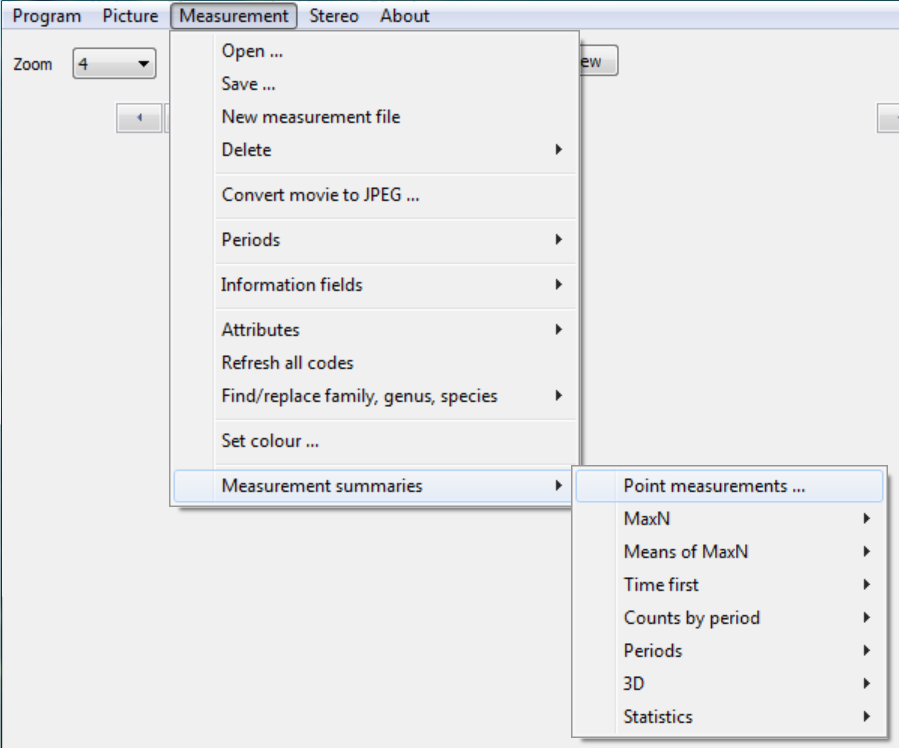
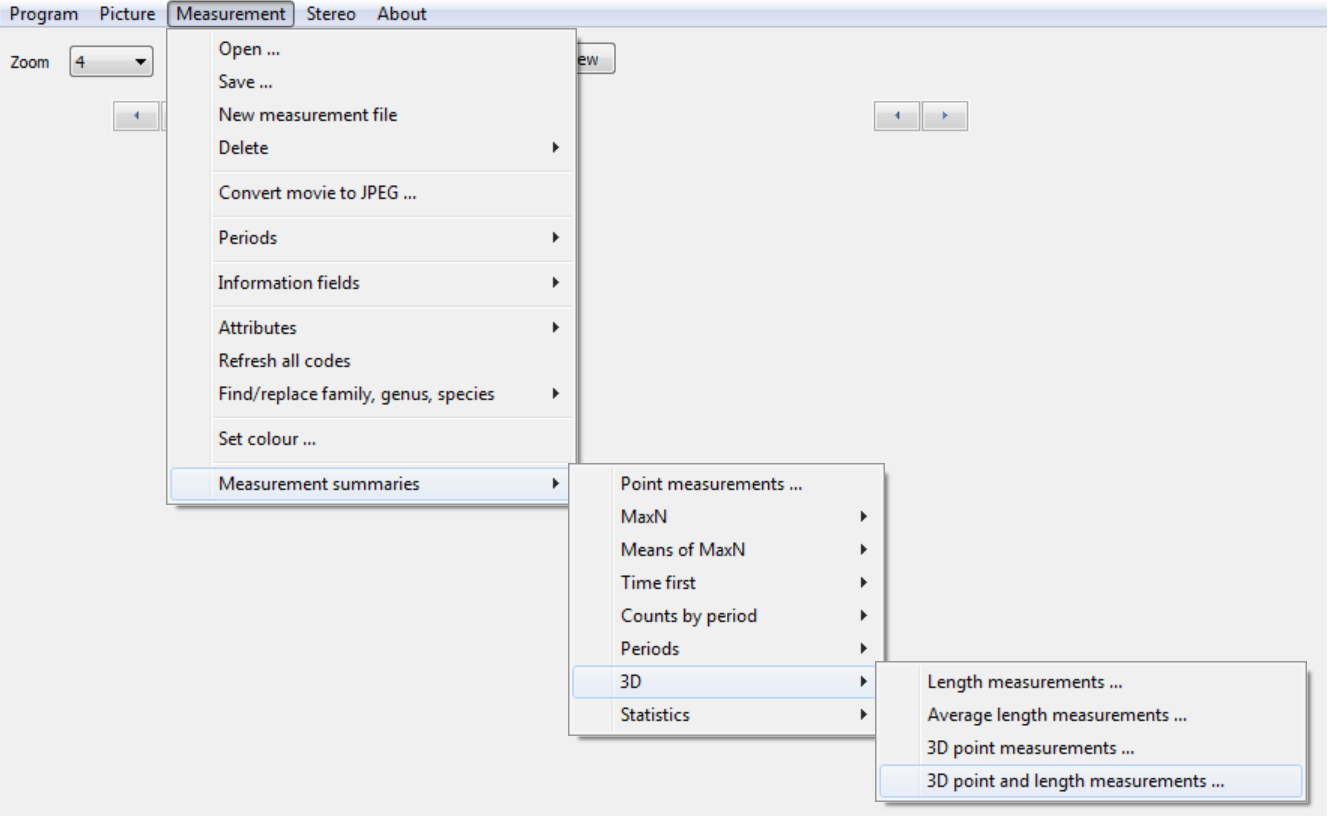
- Nadat alle rotaties zijn geïnventariseerd, exporteren 2D punten door te navigeren naar 'Meting' > 'Meting samenvattingen' > 'Wijs metingen' en 2D punten sparen als a.txt bestand.
- De opgeslagen 2D.txt punt bestand openen als een werkblad en maak een draaitabel soorten vs. rotatiegetal om samen te vatten van tellingen (tabel 1) door te navigeren naar 'Invoegen' > 'Draaitabel'. Selecteer 'Geslacht en soorten' voor "Rijlabel", en "Periode" voor 'De Label van de kolom'.
- Kies de MaxN voor elke soort door het selecteren van de rotatie van de camera met het grootste aantal individuen dat soorten (tabel 1).
- Selecteer een geslacht-niveau MaxN op basis van de rotatie dat het had het grootste aantal personen geïdentificeerd aan soort van dat bepaald geslacht voor vissen die alleen geslacht.
Opmerking: Deze stap helpt om te voorkomen dat dubbele telling afzonderlijke vissen die alleen identificeerbare aan hogere taxonomische groepen (bijvoorbeeldalleen aan geslacht of familie waren). In tabel 1, bijvoorbeeld ' rotatie 1' bevatte 10 ongeïdentificeerde Sebastes spp. en 33 leden van het geslacht Sebastes geïdentificeerd aan soort, overwegende dat ' rotatie 3' bevatte alleen twee onbekende Sebastes spp. en 43 leden van het geslacht Sebastes herkennen aan soorten. Daarom ' rotatie 3' zou worden gebruikt voor MaxN graaf van onbekende Sebastes spp. Op deze manier bestaat de conservatieve veronderstelling dat 8 van de niet-geïdentificeerde Sebastes spp. in ' rotatie 1' werden geïdentificeerd ' rotatie 8'. - Als meerdere rotaties de dezelfde MaxN tellen voor een bepaalde soort, kiest u de eerste rotatie met MaxN voor metingen 3D punt.
- Neem voor elke soort 3D-metingen van vis in de rotatie die MaxN hebben plaatsgevonden.
- De gespaarde 2D punten verzameld in stappen 2.1-2.3 gebruiken om te navigeren naar de exacte dezelfde vis voor 3D-meting.
- Zoom in op zijn minst 4 X beter identificeren het topje van de snuit van de vis en de randen van caudal fins (Figuur 3).
Opmerking: Het kan noodzakelijk zijn naar frame stap vooruit of achteruit te vinden van de beste oriëntatie van de vis voor een 3D-meting zijn. De afdrukstand van de 'beste' is een waar zowel de snuit en de randen van de caudal vinnen zijn zichtbaar in beide camera's. - Handmatig klikt u op het punt van de snuit, vervolgens de rand van de staart in de linker camera, en herhaal vervolgens de selectie in dezelfde volgorde in de juiste video.
- Selecteer identificatie van de juiste soorten in dropdown menu's zoals ook is gebeurd in 2.2.1.
- Als een 3D lengte meting niet mogelijk is voor exemplaar als de kop en de staart van de vis zijn niet zichtbaar in beide camera's, vervolgens markeert een 3D-punt in plaats daarvan door links te klikken op dezelfde positie van de vis in zowel de linker- en video's. Vul de informatievelden als vóór en de reactie achterlaten "Uitsluiten van lengte meting".
Opmerking: MaxN kan optreden op verschillende rotaties van de camera's voor verschillende soorten; echter voor een bepaalde soort, moeten metingen plaatsvinden in één rotatie alleen (tabel 1).
- Na het voltooien van 3D-metingen voor alle vissen, gegevens as.txt bestand voor verdere analyse te exporteren.
- Navigeer naar 'Meting' > 'Meting samenvattingen' > '3D-punt en lengte metingen', en save.txt bestand te exporteren.
3. 95% Z afstand procedure voor soortspecifieke enquête gebieden
Opmerking: De afstand van 95% Z is een schatting van de gemiddelde afstand die een soort kon op betrouwbare wijze worden geïdentificeerd in een bepaalde studie terwijl met uitzondering van gevallen van uitzonderlijke omstandigheden van water duidelijkheid of verlichting. Deze berekening wordt rekening gehouden met de gemiddelde oceanografische voorwaarden voor een bepaalde studie en moet worden opnieuw berekend voor elk nieuw onderzoek.
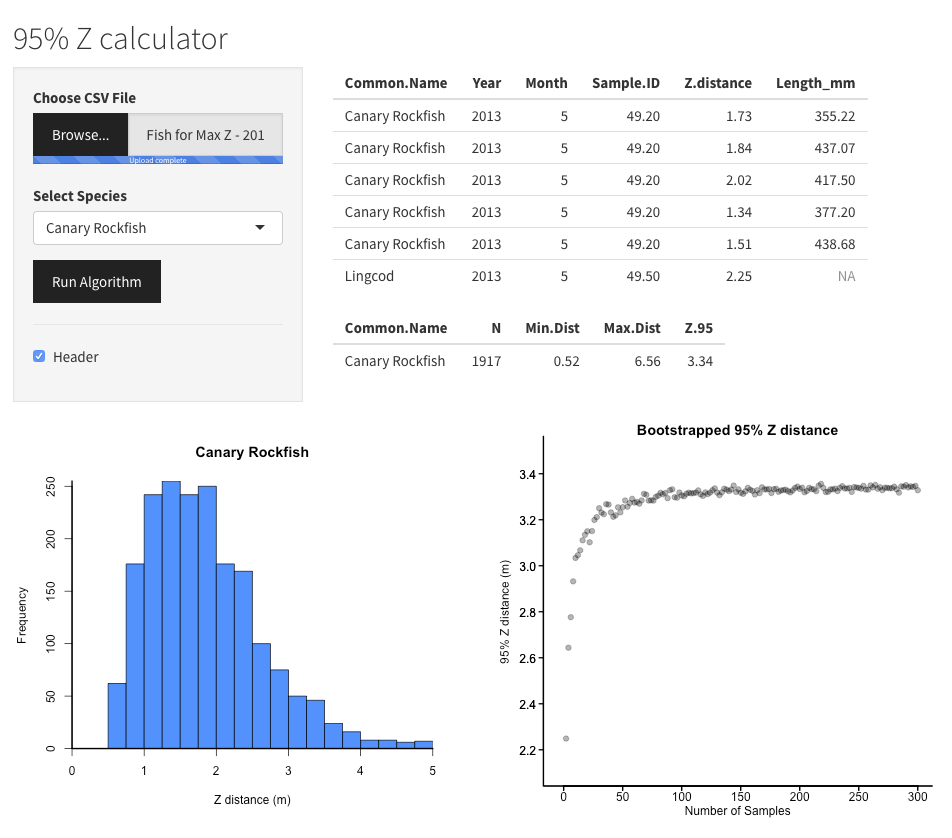
- Gebruik eenvoudige uitvoeren van de bootstrap om te bepalen als de grootte van de steekproef groot genoeg is om te karakteriseren de afstand van betrouwbare detectie voor elke soort is.
- Voor elk monster grootteklasse (bijvoorbeeldmonster grootte opslaglocaties van 5 vis), 1.000 willekeurige trekt van de grootte van de geselecteerde steekproef met vervanging van de steekproef bevolking berekent het gemiddelde van 95% kwantiel van afstanden van deze 1000 trekt en uitzetten van de daaruit voortvloeiende asymptotische curve. Zie bijgeleverde code in aanvullende bestanden 1 & 2.
- Controleer of dat voldoende monsters werden verkregen door vergelijking van de grootte van de werkelijke steekproef met de 95% Z afstand asymptote met toenemende steekproefgrootte.
- De afstand van 95% Z-waarde berekend als de 95% kwantiel van afstand-uit-camera voor een soort te meten over alle enquêtes.
- Bereken de effectieve oppervlakte ondervraagde voor elke soort met de 95% Z-waarde.
Opmerking: In het geval van een roterende Lander, de 95% Z waarde vertegenwoordigt de buitenste straal van een onderzochte swath, met de binnenstraal bepaald door de fysieke installatie van het hulpprogramma en hoe dicht aan de basis van de camera's kunnen observeren. Als de Lander draait, een 'donut' vormige enquête gebied wordt gevormd (Figuur 4).- Berekenen van oppervlakte ondervraagde als:

Opmerking: bijvoorbeeld een relatief grote soorten zoals Yelloweye roodbaars (Sebastes ruberrimus) had een 95% Z afstand van 3,3 m en een oppervlakte van de effectieve enquête 30.9 m2 per Lander distributie: 34,3 m2 (buitenste cirkel) - 3.4 m2 (inwendig cirkel) = 30.9 m2 (totale enquête gebied).
- Berekenen van oppervlakte ondervraagde als:
- Met behulp van het berekende gebied ondervraagde (stap 3.3.1), converteren afzonderlijke soorten graven (MaxN) in dichtheid ramingen voor elk visueel onderzoek met behulp van de vergelijking:

Opmerking: Een soortgelijke procedure kan worden gebruikt voor het berekenen van een volumetrische dichtheid in plaats van een oppervlaktedichtheid; maar wordt dat proces hier niet beschreven.



Tabel 1: Overzichtstabel van de voorbeeld MaxN. De selectie van MaxN voor elke soort is aangetoond met rode en vette tekst. Merk op dat een conservatieve MaxN voor niet-geïdentificeerde Sebastes spp. werd bepaald door de rotatie met de meeste Sebastes soorten (rotatie 3) geïdentificeerd. Ook, terwijl deze studie acht camera rotaties gebruikt, slechts vier rotaties zijn weergegeven in tabel 1 voor eenvoud. De selectieprocedure voor MaxN is identiek ongeacht het aantal rotaties.

Figuur 1: Stereo video Lander. Belangrijke hardware is genummerd (1) 300 m navelstreng, (2) twee digitale videorecorders (DVR) met Verwisselbare opslag van 32 GB kaarten in waterdichte fles, (3) twee LED-verlichting uitvoeren 3.000 lumen bij een kleurtemperatuur van 5.000 K, en (4). twee camera's met 620 TV lijn (TVL) resolutie. Klik hier voor een grotere versie van dit cijfer.

Figuur 2: kalibratie kubus (500 x 500 x 300 mm). Voorbeeld van een kalibratie met een 'kalibratie cube' weergegeven in twee verschillende oriëntaties: (A) de rechterkant van de kubus is geduwd naar camera's, en (B) het gezicht van de kubus is parallel aan het gezicht van de camera's. Rode stippen duiden de referentiepunten in deze bijzondere kalibreringsmethode gebruikt en moeten altijd worden geïdentificeerd in de aangegeven volgorde. Klik hier voor een grotere versie van dit cijfer.

Figuur 3: 3D-meting op Sebastes miniatusgeplaatst. Het topje van de snuit en het einde van de staart werden geïdentificeerd in elk frame van de camera te voorzien van stereo meting. Klik hier voor een grotere versie van dit cijfer.

Figuur 4: gebied bewaakt wordt door het hulpprogramma Lander. Effectieve gebied bewaakt wordt door het hulpprogramma Lander werd begrensd door de minimale Z afstand, en de afstand van de 95% Z voor elke soort. Merk op dat dit gebied een volume van de enquête 'donut' gevormd rond de Lander gemaakt. Klik hier voor een grotere versie van dit cijfer.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Tussen 2013 en 2014 uitgevoerd we 816 enquêtes met de roterende stereo-video Lander (Figuur 1) langs de centrale kust van Californië en de verzamelde MaxN en 95% Z afstand (Figuur 4) gegevens op meer dan 20 soorten. Er waren duidelijke patronen in het aantoonbaar effectieve bereik van de waargenomen, waarschijnlijk als gevolg van de interactie van soorten grootte, vorm en kleur (Figuur 5) soorten. Bijvoorbeeld, heeft de vlag roodbaars (Sebastes rubrivinctus) verschillende strepen op de zijkanten waardoor vertrouwen identificatie op grotere afstanden dan andere soorten van vergelijkbare grootte. Evenzo Canarische roodbaars (Sebastes pinniger) zijn relatief groot bodied, maar hebben een pigment die vergelijkbaar is met andere soorten, waardoor het moeilijker te identificeren op afstand (Figuur 5).
We gebruiken twee soorten om aan te tonen van de berekeningen van zowel de MaxN als de waarden van de 95% Z afstand: Pygmy roodbaars (Sebastes wilsoni) en Ophiodon elongatus (O. elongatus). Eerstgenoemde is een kleine-bodied vis die kan moeilijk vast te stellen op afstand; Overwegende dat O. elongatus relatief groot is, heeft een verschillende vorm en is gemakkelijker te herkennen. Vanaf 2013-2014, werden 1,191 metingen voor S. wilsoni en 1,222 metingen voor O. elongatus verzameld. Vervolgens de 95% quantiles van afstanden waarbij deze soorten werden waargenomen: de 95% Z afstanden werden 2,65 m voor S. wilsoni en 3.96 m voor O. elongatus (Figuur 5) werden berekend. Deze afstanden 95% Z vertalen in effectieve enquête gebied van 18,6 m2 en 46.0 m2 voor S. wilsoni en O. elongatus, respectievelijk. Een eenvoudige bootstrap analyse bevestigd dat voldoende monster maten voor karakterisering van 95% Z afstand waarden werden verkregen. Voor beide soorten, de schatting van 95% Z afstand gestabiliseerd wanneer groter is dan 50 enquêtes met deze soorten werden bemonsterd, sterke bewijze dat de omvang van de gekozen steekproeven meer dan voldoende werden te karakteriseren de effectieve Lander samplegebied voor deze soorten (Figuur 6).
MaxN tellingen per enquête werden vervolgens omgezet in dichtheden (aantal vis/m2). We gebruikt dichtheid ramingen van de 816 enquêtes voor het testen van de hypothese dat Ophiodon elongatus en Pygmy Rockfish voornamelijk op hoog reliëf habitats zou worden waargenomen. Voor beide soorten, er waren significant groter dichtheden over hoge en middelgrote opluchting vergeleken met laag reliëf habitats (Kruskal-Wallis, p <<. 001; Figuur 7). Deze resultaten waren consistent met de eerder gemelde habitat verenigingen voor beide soorten15. Er waren geen verschillen tussen medium en hoog reliëf habitat voor beide soorten.
Om te begrijpen hoe de roterende Lander in vergelijking met traditionele stilstaande camerasystemen, geschat we verschillen in dichtheid en variabiliteit schat tussen een roterende en een gesimuleerde stationaire Lander. Wij ervan uitgegaan een typische stationaire single-camera Lander zou een 90-graden gezichtsveld. De roterende Lander heeft een 60 graden gezichtsveld, en vereist van 5 seconden van de rotatie een 90-graden uitzicht. Met behulp van 261 enquêtes, we vis observatie gegevens geselecteerd uit de middelste 5 seconden van Lander rotaties vast te stellen MaxN. Dichtheid ramingen voor de pseudo-stationaire Lander waren gestandaardiseerd door gebruik te maken van de beperkte gebieden van de dekking (dat wil zeggen, ongeveer ¼ het gebied van de roterende Lander). Verschillen in de gemiddelde dichtheid en variatiecoëfficiënt tussen draaiende en pseudo-stationaire Landers werden geëvalueerd met Welch's t-test. Bedoel dichtheid verkregen door de draaiende camera waren 18% hoger dan die verkregen met stilstaande camera's (Welch's t21,7, p = 0.081, Figuur 8A). Bovendien, de variatiecoëfficiënt 1,8 maal groter was met de stilstaande camera in vergelijking met het draaien van de camera's (Welch's t15.1, p < 0,001, Figuur 8).

Figuur 5 : Z afstanden waargenomen voor select soort(en). Rode verticale balken duiden de Z minimumafstand (0,81 m van camera's) aan de linker- en de waarde van de Z afstand van 95% aan de rechterkant. Merk op dat het hierbij gaat om het gemiddelde effectieve enquête gebied rond de Lander voor elke soort. Klik hier voor een grotere versie van dit cijfer.

Figuur 6 : Z-waarden voor afstand bootstrap. Uitvoeren van de bootstrap om te verhogen van de grootte van de steekproef voor (A) S. wilsoni en (B) O. elongatus waarnemingen. Omvang van de steekproeven variërend van 3-300 waren 1.000 keer elk bootstrap om te berekenen van de gemiddelde afstand van 95% Z en controleer of dat de omvang van de steekproeven toereikend zijn. Merk op dat de y-as-waarden variëren van 2.0-2.6 m voor S. wilsoni en van 2.6-4.0 m voor O. elongatus. Klik hier voor een grotere versie van dit cijfer.

Figuur 7 : Habitat verschillen voor twee select soorten. Gemiddelde dichtheid (± SE) van (A) S. wilsoni en (B) O. elongatus gemeten op laag, gemiddeld en hoog reliëf rock habitat. Klik hier voor een grotere versie van dit cijfer.

Figuur 8 : Verschillen tussen draaiende en pseudo-stationaire landers. Beide schattingen van (A) bedoel dichtheid (vissen/m2 ± SE) en (B) gemiddelde coëfficiënt van de variatie (CV) ± SE voor 261 enquêtes worden gepresenteerd. Klik hier voor een grotere versie van dit cijfer.

Aanvullende Video 1: kalibratie verificatie. Kalibratie kan worden geverifieerd voor gebruik in het veld door het meten van de doelstellingen van bekende maten op verschillende afstanden. Gelieve Klik hier om deze video te bekijken. (Klik met de rechtermuisknop om te downloaden.)

Aanvullende Video 2: onderwater Survey Footage. Gelieve Klik hier om deze video te bekijken. (Klik met de rechtermuisknop om te downloaden.)
Subscription Required. Please recommend JoVE to your librarian.
Discussion
De traditionele MaxN-metriek is gebaseerd op het idee van het tellen van een gegarandeerd minimumaantal personen aanwezig tijdens een onderzoek. Als een bepaald aantal vis tegelijk zichtbaar zijn in een enkel videoframe, er kan niet worden ieder minder aanwezig, maar omdat vis mobiele en ongelijkmatig verdeeld zijn, de waarschijnlijkheid van het zien van alle individuen gelijktijdig tijdens een enkel videoframe is laag . Het is daarom waarschijnlijk dat de traditionele MaxN waar vis overvloed16,17onderschat. Bovendien is gebleken dat de niet-lineaire negatief-vooringenomen relaties met toenemende vis abundanties16,18kan worden weergegeven door de traditionele MaxN. Dit kan worden gerelateerd aan het fenomeen van de verzadiging van de versnelling waarbij relatieve Dichtheidsindices mislukken om op te sporen waar verhoogt in overvloed19,20. Daarentegen is de schijnbare stabiliteit van een index met echt afnemende vis overvloed 'hyperstability' wordt genoemd, en kan uiteindelijk leiden tot de crash van vis populaties21,22. Een recente studie gerapporteerd dat instabiliteit in MaxN kan worden verlicht door het verhogen van de ondervraagde gezichtsveld16. In deze studie werd de relatie tussen MaxN en ware overvloed steeds lineaire zoals het gezichtsveld 100% (d.w.z., 360 graden benaderde).
De resultaten van de simulatie van de stilstaande camera congruentie met deze eerdere resultaten geven en suggereren dat de MaxN-waarde beter vis overvloed kan karakteriseren. Bijvoorbeeld, werd de geschatte gemiddelde coëfficiënt van variantie verminderd onder dichtheid schattingen afgeleid van de roterende Lander in vergelijking met de pseudo-stationaire Lander. Dit is waarschijnlijk wijten aan het feit dat vis zijn ongelijkmatig verdeeld zijn, en dat stilstaande camera's hebben meer kans om te 'missen' de vis aanwezig als de Lander geconfronteerd met de verkeerde richting. Roterende Landers maximaliseren bemonstering inspanning door landmeetkunde de volledige 360 graden rond de tool, en het netto-effect is verlagingen van zowel kosten voor bemonstering en variantie, en een algemene toename van de statistische power van de studie. Toekomstige studies kon beter deze kwestie behandelen door direct het testen van een roterende Lander met een aparte stationaire Lander in een gepaarde enquête ontwerp. Ook konden we direct testen voor de relatie tussen MaxN en ware overvloed in deze studie, en toekomstige studies misschien direct test dit met behulp van beide simulatie of gecontroleerde omgevingen, zoals ook is gebeurd in Campbell (2015)16.
Een eventuele kritiek op de gewijzigde MaxN aanpak is de mogelijkheid van dubbel tellen individuen. Omdat de Lander één volledige omwenteling per minuut gemaakt, en de neiging van de benthische soorten van belang in het ecosysteem relatief sedentaire en langzaam bewegen onder de meeste omstandigheden, wij geloven dat het risico van dubbele telling laag was. Bovendien, werden gevallen waar de vis zou binnenkomen of verlaten van de enquête gebied in de loop van de acht rotaties waargenomen. Extra voorzorgsmaatregelen om te voorkomen dat dubbel tellen zoals het gebruik van de rotatie met het grootste aantal personen van een bepaald geslacht te tellen van onbekende soorten werden genomen. Andere statistieken zijn voorgesteld als indexcijfers van de overvloed van de vis zoals bedoel telling; echter hebben dit te aangetoond dat consequent onderschatten ware overvloed terwijl toenemende variabiliteit tussen dichtheid16 schat. MaxN wordt daarom aanbevolen als een nauwkeuriger metriek van vis overvloed. Terwijl onze gewijzigde MaxN-metriek is geen garantie voor een conservatieve schatting van absolute minimum aantal personen, zijn we over het algemeen ervan overtuigd dat deze gewijzigde MaxN aanpak betere schattingen van overvloed waar vis biedt, en dat overdreven tellen vis van is relatief lage bezorgdheid.
Veel kant-viewing video-transect enquêtes gebruik een vaste breedte te schatten dichtheid voor alle soorten transect. Evenzo is een aanpak voor het gebruik van stereo-video Landers zou moeten gebruiken een maximale afstand-uit-camera vissen dichtheid te berekenen beide onderzochte gebied. Beide kunnen leiden tot een onderschatting van soorten die alleen op betrouwbare wijze herkenbaar zijn aan kleinere afstanden dan de vaste breedte schattingen23 transect. De afstand waarop een soorten op betrouwbare wijze is geïdentificeerd wordt veroorzaakt door de interactie van factoren zoals grootte, vorm, kleur, patroon, vis gedrag, evenals omgevingsfactoren. De 95% Z afstand methode is bijzonder voordelige in dat het goed is voor de interactie van al deze factoren tegelijkertijd. O. elongatus was bijvoorbeeld de soorten die we identificeren met de grootste afstand, waarschijnlijk als gevolg van de verschillende, groot, langgerekt lichaamsvorm en gedragsmatige tendens kunnen te leggen op de zeebodem. Rozengeur en maneschijn roodbaars (Sebastes rosaceus) had een van de kortste afstanden Z, waarschijnlijk omdat, als een lid van het ondergeslacht Sebastomus , zijn er verschillende congeneren die erg lijken en zijn moeilijk te onderscheiden op grotere afstanden. Doordat voor soortspecifieke gebieden bewaakt wordt door de Lander, mei wij zitten kundig voor nauwkeuriger schatting vis overvloed. De bootstrap aanpak steekproef-grootte-keuring is eenvoudig en gemakkelijk uitgevoerd in andere onderzoeken, en wij geloven dat de methode van 95% Z afstand verder zou kunnen worden aangepast zodat de lijn transect enquête ontwerp. 95% Z afstand zou dan een horizontale afstand van betrouwbare detectie voor soorten waargenomen met Onderdompelbare of op afstand bediende vehicle (ROV) tools. In de toekomst kunnen onderzoekers onderzoeken met behulp van afstand bemonstering theorie tot model dichtheid als een functie van detecteerbaarheid met afstand23,24.
Aangezien er meer gebruik van de neen-Neem reserves in visserij beheer25,26,27, is er een toenemende behoefte aan niet-extractieve bemonsteringstechnieken, vooral in diep water habitats niet toegankelijk zijn voor duiker enquêtes. Het is echter ook noodzakelijk dat deze technieken nauwkeurige, betrouwbare gegevens over lengte, overvloed en soorten samenstelling van de vis bieden. Video Landers zijn een relatief nieuwe controlehulpmiddel, die hebben een low-cost, kan worden bediend op relatief kleine schepen van kansen, en logistiek eenvoudiger te bedienen dan ROV's en duikboten terwijl het vereisen van minder en minder geschoold personeel. Terwijl niet besproken in deze methoden, zijn stereo-camera Landers geschikt voor nauwkeurige lengte metingen met fout, minder dan 2%. Bovendien, Landers snel inzetbaar over grote geografische gebieden, toenemende statistische inferentie. Wij verwachten dat de belangstelling voor video controlehulpmiddelen te verhogen als onderzoek agentschappen look te scherpen begrotingen en efficiënter verspreiden bemonstering inspanning. Onze wijziging van MaxN en 95% Z afstand moet worden overwogen in de toekomst ecologische studies met behulp van roterende video Landers.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
De auteurs hebben niets te onthullen
Acknowledgments
Dit werk werd gefinancierd door The Nature Conservancy en particuliere donors, middelen Legacy Fonds, Gordon en Betty Moore Foundation, Environmental Defense Fund, Californië Sea Grant Program, de NMFS National Cooperative Research Program en een NOAA Saltonstall-Kennedy Grant #13-SK-008. Mariene toegepast onderzoek en exploratie (Dirk Rosen, Rick Botman, Andy Lauerman en David Jefferies) ontwikkeld, gebouwd en onderhouden van de video Lander-tool. Wij danken Jim Seager en SeaGIS™ software voor technische ondersteuning. Kapitein en commerciële visser Tim Maricich en bemanningsleden aan boord de F/V Donna Kathleen geboden ondersteuning bij het implementeren van de Lander vanaf 2012-2015. Dank aan allen die hebben deelgenomen aan de video gegevensverzameling of analyse (Anne Tagini, Donna Kline Lt. Amber Payne, Bryon Downey, Marisa Ponte, Rebecca Miller, Matt Merrifield, Walter Heady, Steve Rienecke, EJ Dick en John Field).
Materials
| Name | Company | Catalog Number | Comments |
| calibration cube | SeaGIS | http://www.seagis.com.au/hardware.html | 1000x1000x500 mm is the preferred dimensions. Other methods of calibration are available. |
| CAL calibration software | SeaGIS | http://www.seagis.com.au/bundle.html | |
| EventMeasure stereo measurement software | SeaGIS | http://www.seagis.com.au/event.html | |
| Statistical software | R Core Team 2017 (v. 3.4.0) | Bootstrapping code can be found: https://github.com/rfields2017/JoVE-Bootstrap-Function | |
| Spreadsheet Software | Microsoft Excel | ||
| 2 waterproof cameras | Deep Sea Power and Light | HD quality preferred | |
| 2 depth rated, waterproof lights | Deep Sea Power and Light : 3000 lumen LED with 5000k color temperature | ||
| DVR recorder | Stack LTD DVR | ||
| standard PC | Windows 10 preferred OS | ||
| rotating Lander platform | Marine Applied Research and Engineering (MARE) |
References
- Love, M. S., Yoklavich, M. M., Thorsteinson, L. K. The Rockfishes of the Northeast Pacific. , University of California Press. Berkley. (2002).
- Laidig, T. E., Watters, D. L., Yoklavich, M. M. Demersal fish and habitat associations from visual surveys on the central California shelf. Estuar. Coast. Shelf Sci. 83 (4), 629-637 (2009).
- Anderson, T. J., Yoklavich, M. M. Multiscale habitat associations of deepwater demersal fishes off central California. Fish. Bull. 105 (2), 168-179 (2007).
- Yoklavich, M. M., Cailliet, G. M., Sullivan, D. E., Lea, R. N., Love, M. S. Habitat associations deep-water rockfishes a submarine canyon an example of a natural refuge. Fish. Bull. 98 (3), 625-641 (2000).
- Status of the Pacific Coast Groundfish Fishery, Stock Assessment and Fishery Evaluation. , Pacific Fishery Management Council. Portland, OR. (2016).
- Cappo, M., Harvey, E., Malcolm, H., Speare, P. Potential of video techniques to monitor diversity, abundance and size of fish in studies of marine protected areas. Aquatic protected areas- What works best and how do we know. Beumer, J. P., Grant, A., Smith, D. C. , Proc. World Congr. on Aquat Protected Areas. Australian Soc. for Fish Bio. North Beach, Western Australia. 455-464 (2003).
- McLean, D. L., Green, M., Harvey, E. S., Williams, A., Daley, R., Graham, K. J. Comparison of baited longlines and baited underwater cameras for assessing the composition of continental slope deepwater fish assemblages off southeast Australia. Deep-Sea Research Part I: Oceanographic Research Papers. 98, 10-20 (2015).
- Parker, D., Winker, H., et al. Insights from baited video sampling of temperate reef fishes: How biased are angling surveys. Fish. Res. 179, 191-201 (2016).
- Boutros, N., Shortis, M. R., Harvey, E. S. A comparison of calibration methods and system configurations of underwater stereo-video systems for applications in marine ecology. Limnol. Oceanogr. Methodss. 13 (5), 224-236 (2015).
- Harvey, E. S., Cappo, M., Butler, J. J., Hall, N., Kendrick, G. A. Bait attraction affects the performance of remote underwater video stations in assessment of demersal fish community structure. Mar. Ecol. Prog. Ser. 350, 245-254 (2007).
- Watson, J. L., Huntington, B. E. Assessing the performance of a cost-effective video lander for estimating relative abundance and diversity of nearshore fish assemblages. J. Exp. Mar. Bio. Ecol. 483, 104-111 (2016).
- Easton, R. R., Heppell, S. S., Hannah, R. W. Quantification of Habitat and Community Relationships among Nearshore Temperate Fishes Through Analysis of Drop Camera Video. Mar. Coast. Fish. 7 (1), 87-102 (2015).
- Hannah, R. W., Blume, M. T. O. Tests of an experimental unbaited video lander as a marine fish survey tool for high-relief deepwater rocky reefs. J. Exp. Mar. Bio. Ecol. 430, 1-9 (2012).
- Starr, R. M., Gleason, M. G., et al. Targeting Abundant Fish Stocks while Avoiding Overfished Species: Video and Fishing Surveys to Inform Management after Long-Term Fishery Closures. Plos One. 11 (12), 0168645 (2016).
- Love, M. S. Certainly more than you want to know about the fishes of the Pacific Coast: a postmodern experience. , Really Big Press. Santa Barbara, CA. (2011).
- Campbell, M. D., Pollack, A. G., Gledhill, C. T., Switzer, T. S., DeVries, D. A. Comparison of relative abundance indices calculated from two methods of generating video count data. Fish. Res. 170, 125-133 (2015).
- Cappo, M., Speare, P., De'ath, G. Comparison of baited remote underwater video stations (BRUVS) and prawn (shrimp) trawls for assessments of fish biodiversity in inter-reefal areas of the Great Barrier Reef Marine Park. J. Exp. Mar. Bio. Ecol. 302 (2), 123-152 (2004).
- Schobernd, Z. H., Bacheler, N. M., Conn, P. B., Trenkel, V. Examining the utility of alternative video monitoring metrics for indexing reef fish abundance. Can. Jour. Fish. Aquat. Sci. 71 (3), 464-471 (2014).
- Hansen, M. J., Schorfhaar, R. G., Selgeby, J. H. Gill-Net Saturation by Lake Trout in Michigan Waters of Lake Superior. North Am. J. Fish. Manag. 18 (4), 847-853 (1998).
- Dauk, P. C., Schwarz, C. J. Catch estimation in the presence of declining catch rate due to gear saturation. Biometrics. 57 (1), 287-293 (2001).
- Hilborn, R., Walters, C. J. Quantitative Fisheries Stock Assessment Choice, Dynamics and uncertainty. , Springer. Dordrecht. (1992).
- Erisman, B. E., Allen, L. G., Claisse, J. T., Pondella, D. J., Miller, E. F., Murray, J. H. The illusion of plenty: hyperstability masks collapses in two recreational fisheries that target fish spawning aggregations. Can. Jour. Fish. Aquat. Sci. 68, 1705-1716 (2011).
- Buckland, S. T., Anderson, D. R., Burnham, K. P., Laake, J. L. Distance Sampling: Estimating abundance of biological populations. , Chapman and Hill. London. (1993).
- Ronconi, R. A., Burger, A. E. Estimating seabird densities from vessel transects: Distance sampling and implications for strip transects. Aquat. Bio. 4 (3), 297-309 (2008).
- Caselle, J. E., Rassweiler, A., Hamilton, S. L., Warner, R. R. Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected areas Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected. Nat. Publ. Gr. , 1-14 (2015).
- Starr, R. M., Wendt, D. E., et al. Variation in Responses of Fishes across Multiple Reserves within a Network of Marine Protected Areas in Temperate Waters. Plos One. 10 (3), 0118502 (2015).
- Lester, S., Halpern, B., et al. Biological effects within no-take marine reserves: a global synthesis. Mar. Ecol. Prog. Ser. 384, 33-46 (2009).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}