

Summary
Descriviamo un nuovo metodo per contare i pesci e la stima relativa abbondanza (MaxN) e densità di pesce utilizzando sistemi stereo-videocamera di rotazione. Inoltre dimostriamo come utilizzare distanza dalla fotocamera (Z distanza) per stimare la rilevabilità specie-specifici.
Abstract
L'uso di sistemi di videocamera in studi ecologici di pesce continua a guadagnare trazione come un metodo praticabile, non estrattivi di lunghezze di pesce misura e stima abbondanza di pesce. Abbiamo sviluppato e implementato uno strumento rotante di stereo-videocamera che copre a 360 gradi del campionamento, che massimizza lo sforzo di campionamento rispetto agli strumenti di telecamera fissa. Vari studi hanno dettagliato la capacità dei sistemi statici, stereo-fotocamera per ottenere misurazioni altamente accurati e precisi di pesce; il fuoco qui è stato sullo sviluppo di approcci metodologici per quantificare la densità di pesce utilizzando sistemi rotanti di macchina fotografica. Il primo approccio era quello di sviluppare una modificazione della metrica MaxN, che in genere è un conservatore conteggio del numero minimo di pesci osservati su un'indagine della camera. Ridefiniamo MaxN per essere il numero massimo di pesci osservata in qualsiasi rotazione specificata del sistema di telecamere. Quando vengono prese precauzioni per evitare il doppio conteggio, questo metodo per MaxN può riflettere più accuratamente la vera abbondanza di quella ottenuta da una telecamera fissa. In secondo luogo, perché stereo-video permette di pesce deve essere mappato nello spazio tridimensionale, una stima precisa della distanza dalla fotocamera può essere ottenuta per ogni pesce. Utilizzando il percentile 95% della distanza osservata dalla fotocamera per istituire aree specifici della specie censite, si tiene conto di differenze di rilevabilità tra specie, evitando di diluire le stime di densità utilizzando la distanza massima che era di una specie osservato. Contabilità per questa gamma di rilevabilità è fondamentale per stimare con precisione le abbondanze di pesce. Questa metodologia faciliterà l'integrazione di strumenti stereo-video nella scienza applicata e contesti di gestione a rotazione.
Introduction
Lungo la costa del Pacifico degli Stati Uniti, molte delle specie importanti alla pesca commerciale e ricreativa demersali (ad es., la scorpena complesse (Sebastes spp.) e Lingcod (Ophiodon elongatus)) sono fortemente associati con habitat di alto rilievo, fondo duro1,2,3,4,5. Goccia di stereo-video telecamere è uno strumento attraente non estrattivo da utilizzare in habitat rocciosi a causa della relativa facilità e semplicità di funzionamento. Una varietà di sistemi stereo-videocamera sia stato sviluppato e distribuito nell'emisfero australe, acque poco profonde ecosistemi6,7,8,9,10, e Recentemente, goccia-telecamere video hanno guadagnato trazione come strumento di gestione per gli ambienti di reef roccioso di acque profonde lungo la costa del Pacifico11,12,13. Abbiamo cercato di modificare questi disegni di stereo-fotocamera esistenti utilizzando un sistema stereo-videocamera (in appresso denominato "Lander") per caratterizzare in modo più efficiente le popolazioni di pesci in altorilievo fondali lungo la costa centrale del Pacifico (Vedi tabella di Materiali). Il Lander usato era diverso rispetto ai sistemi video esistenti perché telecamere sono stati montati in un bar centrale rotante, che ha permesso per un 360° pieno di copertura del fondo marino alla goccia posizione14. Il Lander completato un giro completo al minuto, che ci ha permesso di caratterizzare l'abbondanza e la composizione della comunità di un'area rapidamente e raggiungere lo stesso livello di potenza statistica con meno distribuzioni di Lander. (Vedi Starr (2016)14 per maggiori dettagli sulle specifiche della configurazione del Lander). Prove preliminari del sistema di studio ha suggerito che otto rotazioni delle telecamere ai nostri sondaggi erano sufficienti per caratterizzare la ricchezza e l'abbondanza di specie. Questa determinazione è stata effettuata tramite un'osservazione dei rendimenti decrescenti in abbondanza di specie e densità di pesce sopra gocce più a lungo. Si consiglia di che uno studio pilota, tra cui tempi di ammollo condotte in qualsiasi nuovo sistema per determinare il tempo di immersione ottimale per una specie di dato ecosistema/Studio.
Utilizzando telecamere stereo accoppiati, entrambi totale area di indagine e densità assoluta pesce può essere calcolato per ogni sondaggio dei video; Tuttavia, l'uso di telecamere a rotazione ha reso necessaria la modifica di pesce tradizionale conteggio metriche. Sistemi stazionari di video utilizzano più spesso "MaxN" come una conservatore Conte di pesci su una distribuzione6,10. MaxN tradizionale viene descritto il numero massimo di pesci di una data specie osservata insieme in un singolo fotogramma video, al fine di evitare il doppio conteggio un pesce che ha lasciato e siamo tornati al telaio. MaxN è stata quindi una stima del numero minimo di pesce conosciuto per essere presente e può sottostimare il pesce vero abbondanza6,10. La metrica MaxN è stata ridefinita per rappresentare il maggior numero di pesci visti in ogni rotazione completa delle telecamere.
La seconda modifica ai precedenti metodi video stereo doveva rappresentare il fatto che le specie di varie dimensioni, colore, e forme hanno differenti distanze massime di identificazione affidabile. Ad esempio, specie di grandi dimensioni ad esempio o. elongatus hanno una forma allungata distinta e possono essere identificati attendibilmente a distanze molto maggiori rispetto alle specie piccole e criptico come il Squarespot Rockfish (Sebastes hopkinsi). Queste diverse gamme massime di rilevabilità cambiano zona efficace campionata mediante il Lander per ciascuna specie. Perché le telecamere stereo permettono di posizionare ogni pesce in uno spazio tridimensionale con un alto grado di precisione, si può determinare la distanza dalle telecamere che ogni pesce è stato misurato (vale a dire, la "distanza Z", denominato per l'asse "z" che è perpendicolare alla linea retta tracciata tra le telecamere). Per ciascuna specie, la distanza entro il quale il 95% di tutti gli individui sono stati osservati (in appresso "distanza 95% Z") è stata considerata come il raggio dell'area di indagine ed è stata usata per calcolare l'area totale intervistato. Oltre alle caratteristiche specie-specifiche, identificabilità saranno influenzate dalle condizioni ambientali come torbidità dell'acqua. Poiché questi fattori possono variare nel tempo e nello spazio, è importante usare la statistica del 95% Z solo in forma aggregata. Mentre sarà altamente accurata per grandi campioni, qualsiasi un'indagine individuale può variare nell'area esaminata.
Il protocollo descritto di seguito vengono fornite indicazioni su come creare e utilizzare queste metriche. Anche se il fuoco era di caratterizzare acque profonde habitat rupestre lungo la costa del Pacifico, la metodologia descritta per modificate MaxN conteggio è facilmente applicabile a qualsiasi sistema di goccia-fotocamera rotante. Il numero di rotazioni fotocamera necessarie per caratterizzare popolazioni ittiche dipenderà molto dinamica degli ecosistemi locali, ma la concettualizzazione della modificate MaxN rimarrà la stessa. Allo stesso modo, considerando che abbiamo usato software di fotogrammetria 3D per analizzare video stereo, le tecniche descritte nel presente documento sono facilmente applicate di piattaforme software, purché la posizione precisa del pesce nello spazio tridimensionale è possibile. Inoltre, l'approccio di applicare un valore di 95% Z distanza potrebbe essere considerato in futuro studi con stereo-telecamere per conto per specie-specifici intervalli di rilevabilità e calcolare con maggiore precisione abbondanza di pesce.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
Nota: Gli screenshot di software procedura sono inclusi come File supplementari. Siete pregati di notare che i punti del software descritti di seguito sono specifici per il software prescelto (Vedi la Tabella materiali). L'approccio globale può essere esteso a qualsiasi piattaforma software stereo.
1. preparare filmati Stereo-fotocamera per l'analisi
Nota: È consigliabile calibrazione utilizzando un cubo di calibrazione. Un cubo di calibrazione è un telaio in alluminio tridimensionale con proprio puntini riflettente posizionati sulla superficie. Quando utilizzato in combinazione con software di calibrazione, un cubo di calibrazione conduce ad una maggiore precisione e accuratezza rispetto a scacchiera approcci9.
- Calibrare le fotocamere Lander con stereo-calibrazione software (Figura 1 e Figura 2; Vedi Tabella materiali per una raccomandazione di software).
Nota: Calibrazione può essere verificata prima dell'uso nel campo misurando bersagli di dimensioni note a varie distanze (Vedi supplementare Video 1). Errore di misura media per un target di 50 cm a distanze di 3 m (o meno) dovrebbe essere entro il 2% della lunghezza destinazione nota. Si noti inoltre che una determinata taratura solo sarà valida se posizioni della telecamera non cambiano uno rispetto a altro. È fondamentale prendersi cura e evitare spintoni non intenzionale delle telecamere fino a quando è stato eseguito il campionamento di tutti. - Raccogliere i dati di campo utilizzando il Lander calibrato (Figura 1, complementare Video 2).
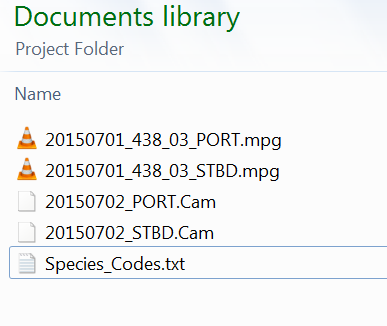
- Dopo aver completato studio sul campo, creare una nuova cartella di progetto contenente i file video e la calibrazione.
Nota: In ogni progetto cartella ci ha bisogno di minimo di cinque file: sinistra e destra ". File di calibrazione CAM", i file video di destra e sinistro (. MP4 o. Solo in formato AVI) e l'elenco delle specie (formato. txt). - Nel software di misurazione stereo, avviare un nuovo progetto di misura e caricare file video e calibrazione appropriati.
Nota: Gli screenshot di tutti i passaggi di software sono disponibili tra i File supplementari.- Passare a 'Misurazione' > 'Nuovo measurement file'.
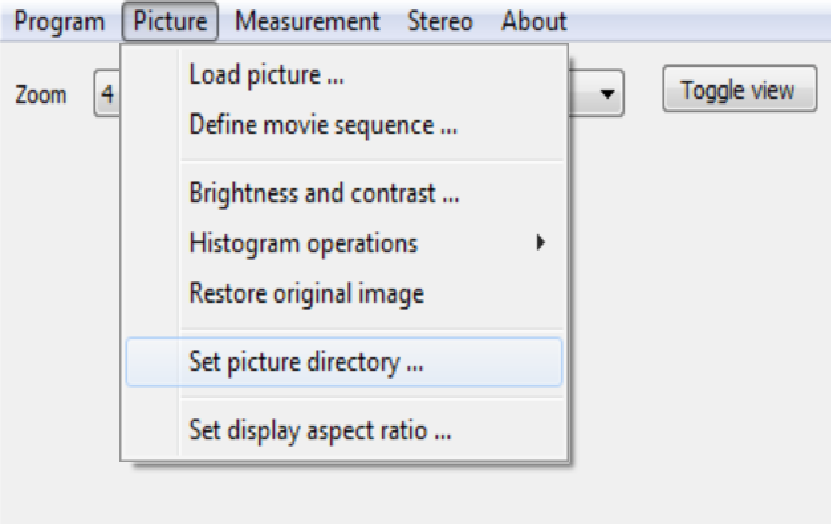
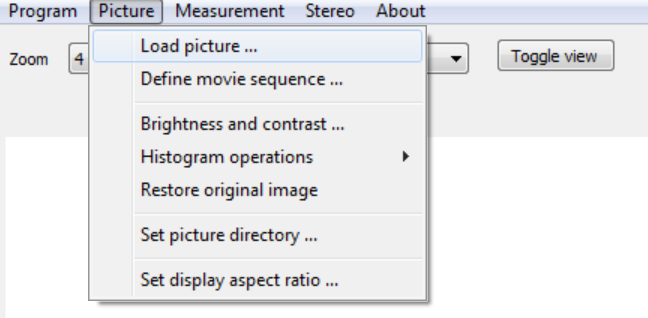
- Impostare la directory di foto accedendo a 'Immagine' > 'cartella Foto Set' e scegliere la cartella contenente tutti i file di progetto.
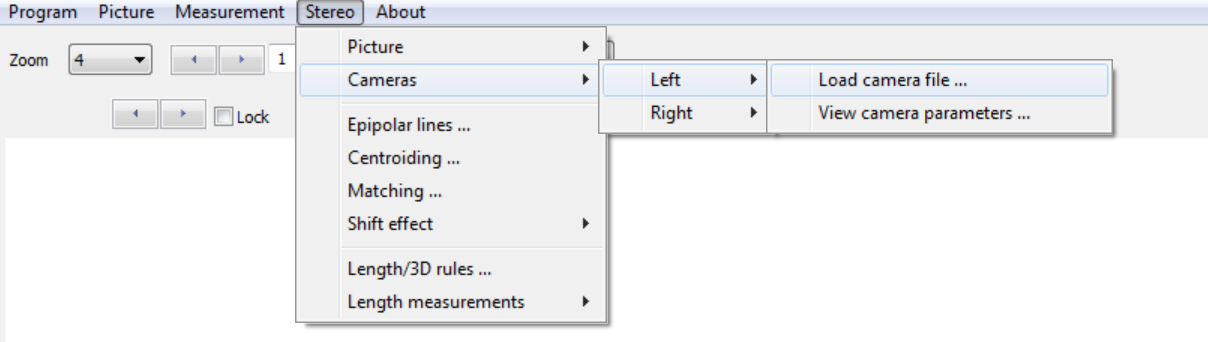
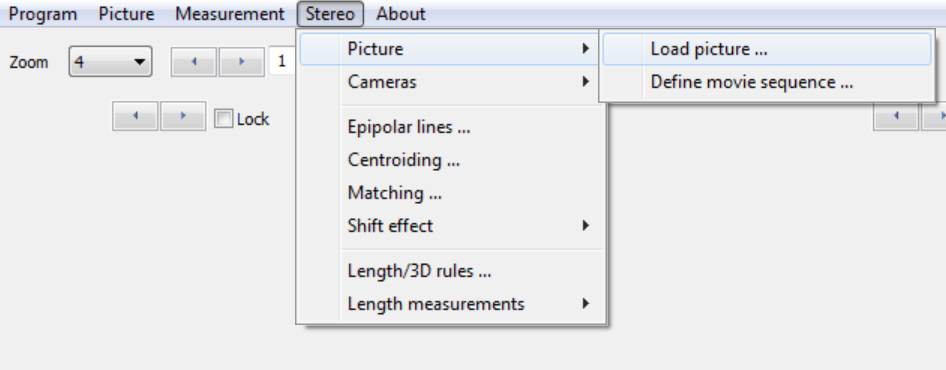
- Caricare la telecamera a sinistra ". Cam"il file selezionando 'Stereo' > 'Telecamere' > 'Left' > 'Carica file fotocamera' e selezionando il file appropriato.
- Ripetere il punto 1.4.3 per caricare la fotocamera giusta ". File CAM"
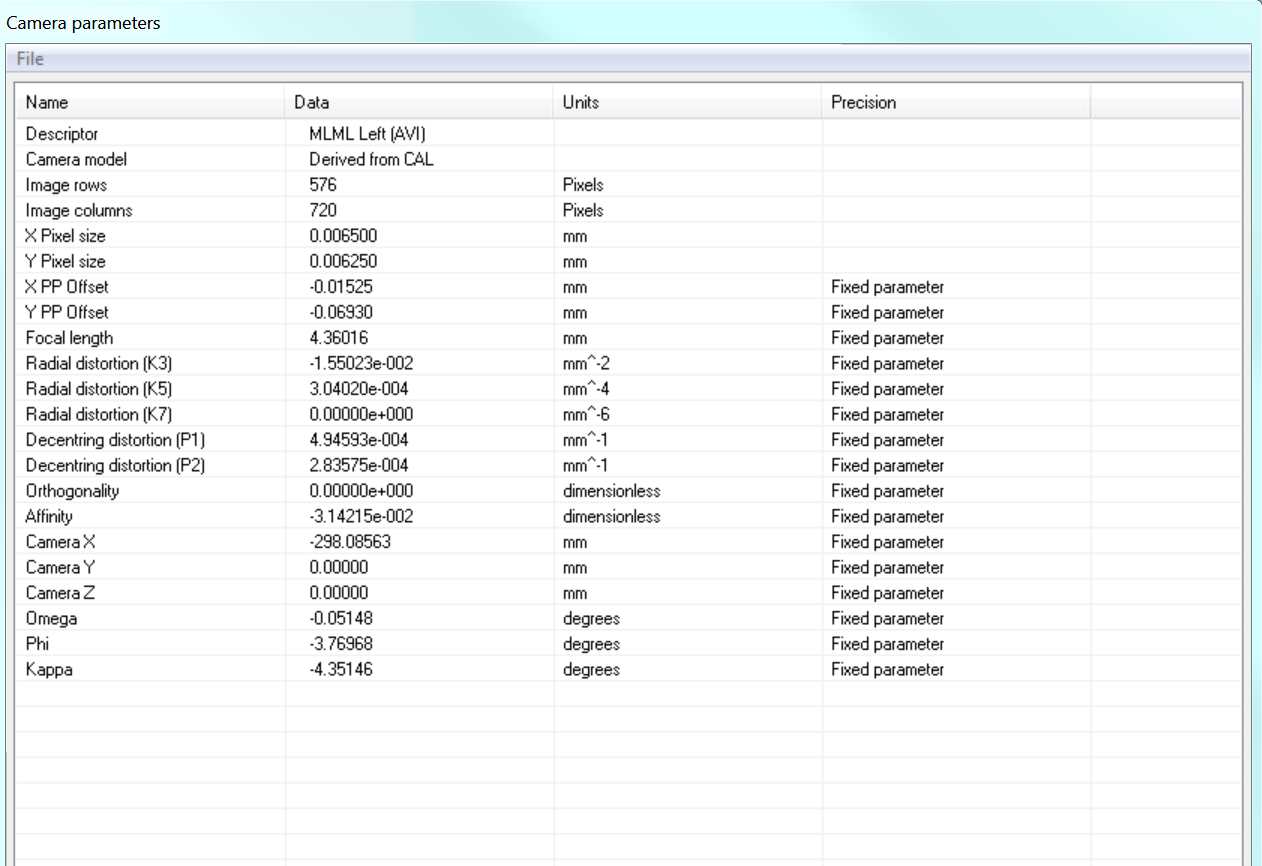
Nota: Questi file contengono le misurazioni di calibrazione per ogni telecamera (ad es., dimensione dei pixel, proporzioni, la distorsione radiale, decentring distorsione, ecc.) e verranno utilizzati per misurare pesce e calcolare la distanza dalla fotocamera (cioè, Z distanza). - Definire la sequenza di film per il file video sinistra accedendo a 'Immagine' > 'definire la sequenza di film' e selezionando il file video telecamera a sinistra.
- Caricare il file video sinistro nel software di misura selezionando 'Picture' > 'carica immagine'.
Nota: Assicurarsi che la casella di 'Bloccare' sia selezionata prima di caricare i file video. In questo modo entrambi i video da caricare contemporaneamente. - Definire film sequenza e caricare file video per il video a destra utilizzando i menu 'Stereo' > 'immagine' > 'definire la sequenza di film' e 'Stereo' > 'immagine' > 'carica immagine'.
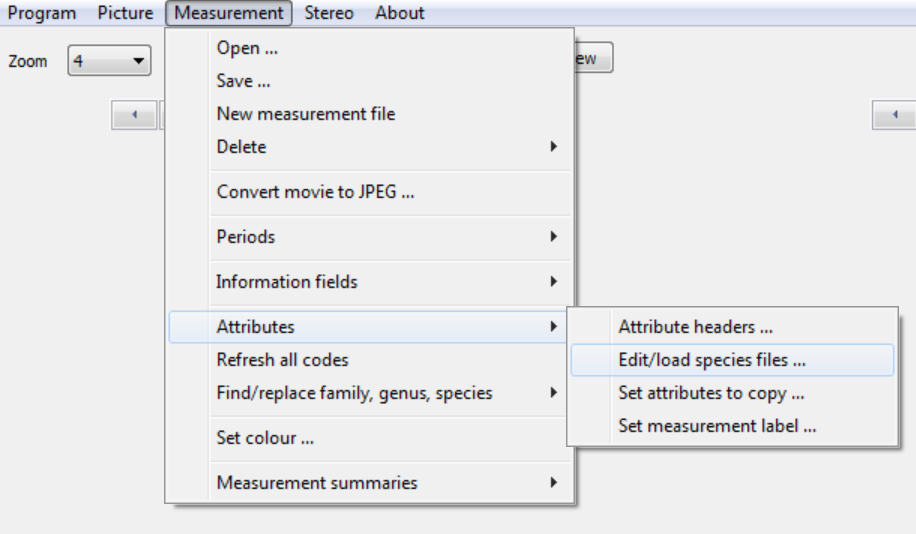
- Caricare l'elenco di specie accedendo a 'Misurazione' > 'Attributi' > ' modifica/carica file di specie'.
- Immettere informazioni sull'ID di indagine sotto 'Informazioni campi' > 'Modifica il valore del campo' e salvare file per creare un. Progetto EMObs.
- Sincronizzare i video utilizzando flash light, handclap, bollo di tempo universale coordinato (UTC) o qualsiasi evento specifico di tempo che si verifica in entrambi i video.
- Se si utilizza il timestamp di UTC, telaio-passo avanti nel video sinistra fino a quando l'indicatore ora inizia un nuovo secondo. Altro fotogramma avanti fino al lampo di luce o handclap si verifica.
- Telaio-passo il video a destra in avanti fino a quando il timestamp corrisponde esattamente il video di sinistro. Altro telaio passo avanti fino a quando il momento esatto del lampo di luce o handclap corrisponde il video di sinistro.
Nota: È importante che il video essere sincronizzati sullo stesso fotogramma. Sincronizzazione video dovrebbe essere controllata periodicamente utilizzando il timestamp video per evitare fotocamera telaio deriva durante l'analisi. Un clap mano girato potrebbe essere utilizzato anche all'inizio e alla fine del video per verificare tale diritto e sinistra video sono stati sincronizzati sullo stesso fotogramma.
- Fare clic sul pulsante "Lock" per garantire video gioca insieme e manutenzione la sincronizzazione.
2. generare punto conta e calcolare MaxN
Nota: Ogni pesce inizialmente è contrassegnata con un punto 2D per il più basso possibile risoluzione tassonomica. Pesce con ID incerti devono essere contrassegnati per la revisione successiva.
- L'ora di iniziare il conteggio di pesce fino alla fine di una rotazione completa della fotocamera per garantire un utilizzo a 360 gradi. Anche aspettare fino a quando ha eliminato il sedimento (generalmente < 1-2 min dopo il contatto con il fondo).
- Appena il Lander inizia la prima rotazione, fare clic destro per definire un nuovo periodo di campione: «Periodo definizioni» > 'Aggiungi nuovo inizio periodo'. Immettere il nome del primo periodo come "01" e fare clic su "OK".
- Come il Lander ruota, iniziare marcatura ogni pesce che viene fornito nel telaio con un punto 2D utilizzando solo la telecamera a sinistra.
- Per aggiungere un punto 2D, fare clic destro, selezionare 'Aggiungi punto' e scegliere il nome corretto della specie. Etichetta al più basso livello possibile di tassonomico, selezionando «spp.» per specie sconosciute e cliccare su "OK".
- Continuano a segnare ogni nuovo pesce secondo punto 2.2.1 fino alla conclusione della rotazione.
- Ripetere il protocollo procedure 2.1-2.2 per ogni rotazione addizionale di Lander - assicurando che un nuovo periodo è definito all'inizio di ogni rotazione della telecamera.
Nota: Le curve di accumulo di specie sono state usate per determinare che otto rotazioni erano, in media, sufficiente per caratterizzare l'abbondanza di pesce nello studio presente. I ricercatori dovrebbero considerare lo svolgimento di test preliminari con rotazioni telecamera aggiuntiva, sopra più lunghi tempi di ammollo, per caratterizzare il numero ottimale di rotazioni fotocamera all'interno di un particolare ecosistema. - Calcolare specie-conteggi degli individui osservati per rotazione della fotocamera.
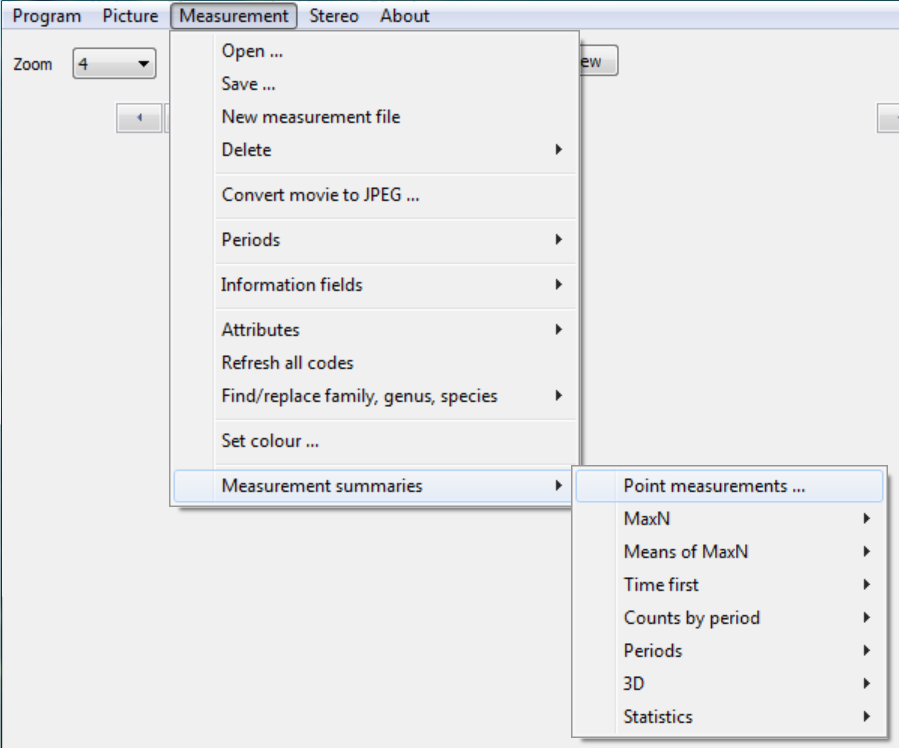
- Dopo tutte le rotazioni sono state enumerate, esportare punti 2D accedendo a 'Misurazione' > 'Riassunti misura' > 'Misure puntuali' e salvare punti 2D come a. txt file.
- Aprire il file di punto di 2D.txt salvato come un foglio di calcolo e creare una tabella pivot di specie e il numero di rotazione per riepilogare i conteggi (tabella 1) accedendo a 'Insert' > 'Tabella pivot'. Selezionare "Genere e specie" per "Etichetta di riga" e "Periodo" per 'Etichetta di colonna'.
- Scegliere il MaxN per ciascuna specie selezionando la rotazione della fotocamera che ha il maggior numero di individui di questa specie (tabella 1).
- Per pesci identificati solo al genere, selezionare un livello di genere MaxN basato sulla rotazione che aveva il maggior numero di individui identificati per specie in quel particolare genere.
Nota: Questo passaggio consente di evitare duplicazioni singoli pesci che erano solo identificabili a gruppi tassonomici superiori (ad es., solo per genere o famiglia). Ad esempio, in tabella 1, ' giri 1' contenevano 10 non identificato Sebastes spp e 33 membri del genere Sebastes identificato alla specie, mentre ' rotazione 3' conteneva solo due non identificati Sebastes spp e 43 membri di il genere Sebastes identificato alla specie. Pertanto ' rotazione 3' sarebbe stati utilizzati per conteggio MaxN sconosciuto Sebastes spp. In questo modo, il conservatore presupposto che 8 del non identificato Sebastes spp ' giri 1' sono stati identificati in ' rotazione 8'. - Se più rotazioni hanno lo stesso numero di MaxN per una data specie, scegliere la prima rotazione con MaxN per misurazioni del punto 3D.
- Per ciascuna specie, prendere misure 3D di pesce nella rotazione che MaxN si è verificato.
- Utilizzare i punti 2D salvati raccolti nei passaggi 2.1-2.3 per spostarsi il pesce stesso esatto per misurazione 3D.
- Zoom in almeno 4 volte per meglio identificare la punta del muso di pesce e i bordi delle pinne caudali (Figura 3).
Nota: Potrebbe essere necessario al passaggio di fotogramma in avanti o indietro per trovare il migliore orientamento dei pesci per una misurazione 3D. L'orientamento 'migliore' è uno dove sia il muso e i bordi delle pinne caudali sono visibili in entrambe le fotocamere. - Manualmente, fare clic sulla punta del muso, quindi il bordo della coda nella telecamera a sinistra, quindi ripetere la selezione nello stesso ordine nel video giusto.
- Selezionare identificazione di specie corretta dal menu a discesa, come è stato fatto in 2.2.1.
- Se una misura di lunghezza 3D non è possibile, per istanza se la testa e la coda del pesce non sono visibili in entrambe le fotocamere, quindi contrassegnare un punto 3D invece da sinistra cliccando la stessa posizione del pesce in entrambi i video di sinistra e destra. Compila i campi di informazioni come prima e lasciare il commento "Escludere dalla lunghezza di misurazione".
Nota: MaxN può verificarsi in diverse rotazioni delle telecamere per le diverse specie; Tuttavia, per qualsiasi data specie, misure dovrebbero verificarsi in una rotazione solo (tabella 1).
- Dopo aver completato misurazioni 3D per tutti i pesci, esportare file di as.txt di dati per ulteriori analisi.
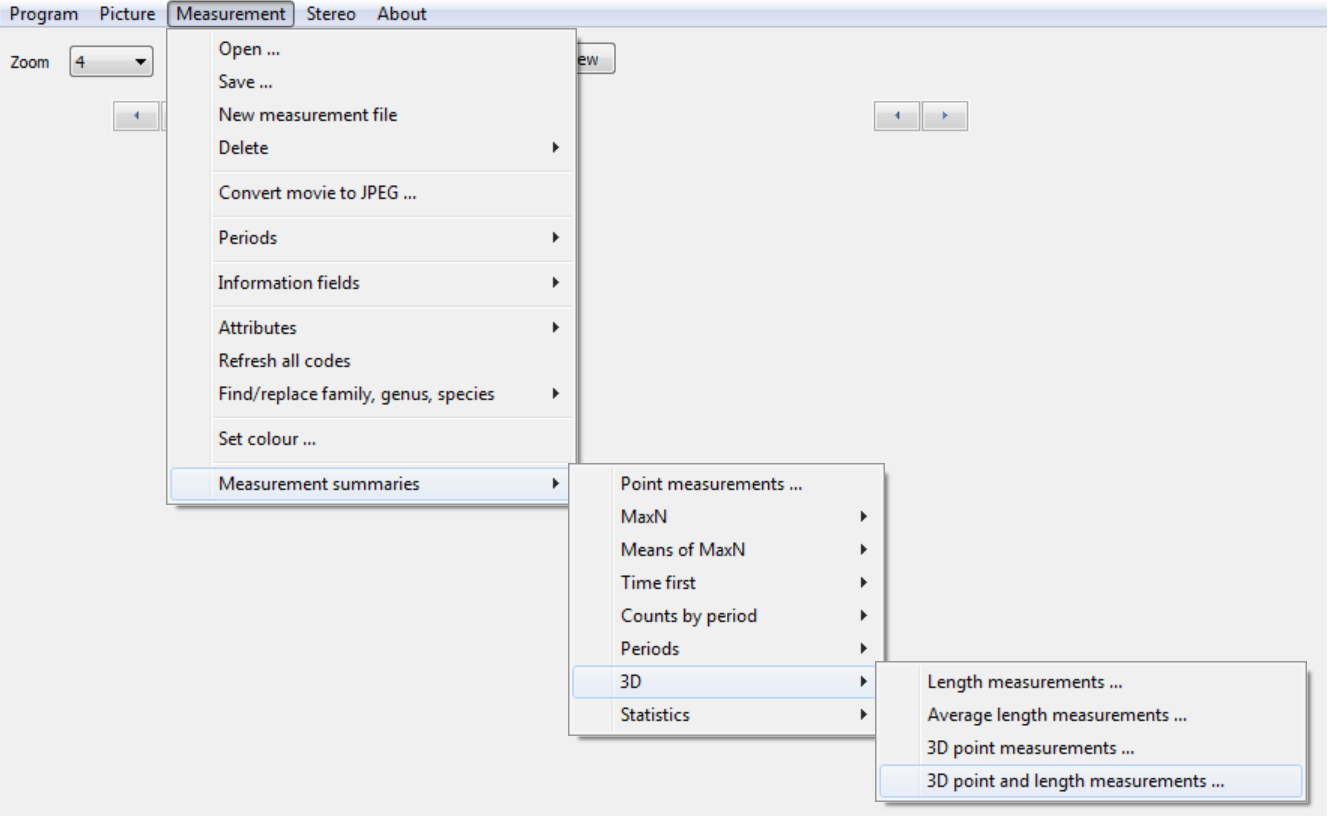
- Passare a 'Misurazione' > 'Riassunti misura' > 'misure di lunghezza e punto 3D' e Save file da esportare.
3. 95% Z distanza procedura per aree di indagine specie-specifici
Nota: La distanza di 95% Z è una stima della distanza media che una specie potrebbe essere identificata attendibilmente in un dato studio pur escludendo i casi di eccezionali condizioni di limpidezza dell'acqua o illuminazione. Questo calcolo tiene conto della media condizioni oceanografiche per un dato studio e dovrà essere ri-calcolato per ogni nuovo studio.
- Utilizzare l'avvio semplice per determinare se la dimensione del campione è abbastanza grande per caratterizzare la distanza di rilevamento affidabile per ciascuna specie.
- Per ogni classe di dimensione del campione (ad es., bidoni di dimensione del campione di 5 pesci), prendono 1.000 casuale disegna delle dimensioni campione selezionato con sostituzione dalla popolazione campione e calcolare la media quantile 95% delle distanze di questi 1.000 disegna e trama risultante curva asintotica. Vedere il codice fornito in supplementare file 1 & 2.
- Verificare che un campionamento adeguato sono stato ottenuto confrontando la dimensione effettiva del campione con l'asintoto 95% Z distanza con l'aumento della dimensione del campione.
- Calcolare il valore di 95% Z distanza come il quantile 95% di distanza dalla fotocamera misurata per una specie attraverso tutte le indagini.
- Calcolare l'area efficace intervistato per ciascuna specie utilizzando il valore di 95% Z.
Nota: Nel caso di un Lander rotante, i valore di 95% Z rappresenta il raggio esterno di un'andana intervistata, con il raggio interno determinata dalla configurazione fisica dello strumento e come chiudere alla base le telecamere sono in grado di osservare. Come il Lander ruota, è formata un'area di indagine a forma di ' ciambella' (Figura 4).- Calcolare area censita come:

Nota: ad esempio, una specie relativamente grande come Yelloweye Rockfish (Sebastes ruberrimus) aveva una distanza di 95% Z di 3,3 m e un'area di indagine efficace di 30,9 m2 per distribuzione Lander: 34,3 m2 (cerchio esterno) - 3,4 m2 (interno cerchio) = 30,9 m2 (area di indagine totale).
- Calcolare area censita come:
- Utilizzando l'area calcolata intervistate (punto 3.3.1), Converti singole specie i conteggi (MaxN) in stime di densità per ogni rilevamento visivo utilizzando l'equazione:

Nota: Una procedura simile potrebbe essere utilizzata per calcolare una densità volumetrica, piuttosto che una densità areale; Tuttavia, tale processo non è descritto qui.



Tabella 1: tabella riassuntiva esempio MaxN. La selezione di MaxN per ogni specie è dimostrata con testo rosso e grassetto. Si noti che un conservatore MaxN non identificato Sebastes spp è stata determinata dalla rotazione con la maggior parte Sebastes identificato alla specie (rotazione 3). Inoltre, mentre questo studio ha usato otto rotazioni fotocamera, solo quattro rotazioni vengono visualizzati nella tabella 1 per semplicità. Il processo di selezione MaxN è identico indipendentemente dal numero di rotazioni.

Figura 1: Lander video Stereo. Chiave hardware è numerato (1) 300m ombelicale, (2) due videoregistratori digitali (DVR) con schede di memoria rimovibili 32 GB all'interno della bottiglia impermeabile, l'output 3.000 lumen di luci (3) due LED ad una temperatura di colore di 5.000 K e (4). due telecamere con risoluzione di linea (TVL) 620 TV. Clicca qui per visualizzare una versione più grande di questa figura.

Figura 2: cubo di calibrazione (500 x 500 x 300 mm). Esempio di una taratura con un 'cubo di calibrazione' mostrato in due diversi orientamenti: (A) lato destro del cubo è spinto verso telecamere, e (B) la faccia del cubo è parallelo alla faccia delle telecamere. I punti rossi indicano i punti di riferimento utilizzati in questo metodo di calibrazione particolare e devono sempre essere identificati nell'ordine numerato. Clicca qui per visualizzare una versione più grande di questa figura.

Figura 3: misura 3D immessi sul Sebastes miniatus. La punta del muso e punta della coda sono stati identificati in ogni fotogramma della fotocamera per consentire misurazione stereo. Clicca qui per visualizzare una versione più grande di questa figura.

Figura 4: Area intervistato dallo strumento del Lander. Area effettiva rilevata dallo strumento Lander confinava con la minima distanza Z e la distanza di 95% Z per ciascuna specie. Si noti che questa zona creato un volume di indagine a forma di ' ciambella' intorno il Lander. Clicca qui per visualizzare una versione più grande di questa figura.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
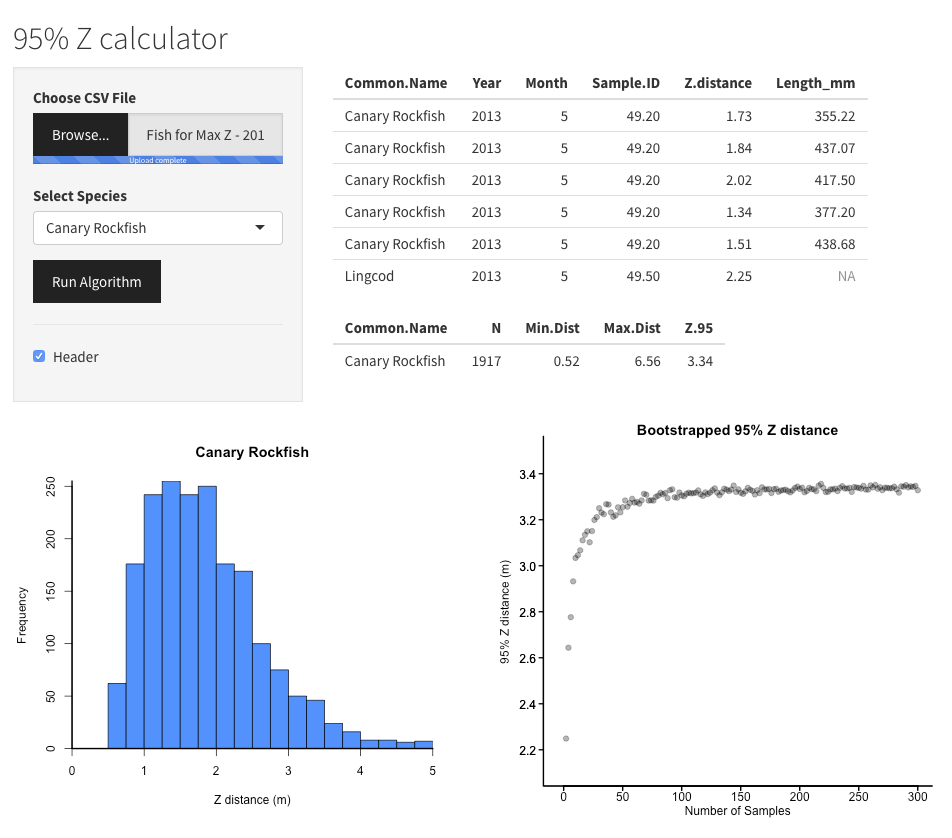
Tra il 2013 e 2014, abbiamo condotto 816 sondaggi con il Lander stereo-video rotante (Figura 1) lungo la costa centrale della California e dati raccolti MaxN e 95% Z distanza (Figura 4) su più di 20 specie. C'erano schemi chiari nella gamma efficace rilevabile delle specie osservate, probabilmente a causa dell'interazione delle dimensioni della specie, forma e colorazione (Figura 5). Per esempio, la bandiera Rockfish (Sebastes rubrivinctus) ha bande distinte sui lati per una identificazione fiducioso a distanze maggiori rispetto ad altre specie di dimensioni comparabili. Allo stesso modo, Canary Rockfish (Sebastes pinniger) sono relativamente grandi di corpo, ma hanno una pigmentazione che è simile ad altre specie, rendendo così più difficile l'identificazione a distanza (Figura 5).
Usiamo due specie per dimostrare i calcoli di MaxN sia valori di 95% Z distanza: pigmeo Rockfish (Sebastes wilsoni) e Lingcod (o. elongatus). Il primo è un pesce dal corpo piccolo che può essere difficile da identificare a distanza; considerando che o. elongatus è relativamente grande, ha una forma distinta ed è più facilmente identificabile. Dal 2013-2014, 1.191 misure per S. wilsoni e 1.222 misure per o. elongatus sono stati raccolti. Quindi, il quantile 95% delle distanze a cui queste specie sono state osservate: le distanze di 95% Z erano 2,65 m di s. wilsoni e 3,96 m per o. elongatus (Figura 5) sono stati calcolati. Queste distanze 95% Z si traducono in aree di indagine efficace di 18,6 m2 e 46,0 m2 per S. wilsoni e o. elongatus, rispettivamente. Una semplice analisi di bootstrap ha confermato quel campione sufficiente dimensioni sono stati ottenuti per la caratterizzazione del 95% i valori di distanza Z. Per entrambe le specie, la stima della distanza di 95% Z stabilizzato quando è maggiore di 50 sondaggi contenente queste specie sono state campionate, fornendo la prova ben fondata che le dimensioni del campione selezionate erano più che adeguate caratterizzare l'area campione di Lander efficace per questi specie (Figura 6).
MaxN conteggi per l'indagine sono stati poi convertiti in densità (numero di pesci/m2). Abbiamo usato le stime di densità da 816 indagini per verificare l'ipotesi che Lingcod e pigmeo Rockfish verrebbero osservati principalmente sugli habitat di alto rilievo. Per entrambe le specie, c'erano significativamente maggior densità oltre ad alta e media sollievo rispetto a basso rilievo habitat (Kruskal-Wallis, p <<. 001; Figura 7). Questi risultati erano costanti con le associazioni precedentemente segnalati habitat per entrambe specie15. Non c'erano differenze tra medio e alto rilievo habitat per entrambe le specie.
Per comprendere come il Lander rotante rispetto ai sistemi di telecamera fissa tradizionale, abbiamo stimato le differenze nella densità e stime di variabilità tra una rotazione e un Lander stazionario simulato. Abbiamo assunto che un tipico stazionario singola videocamera Lander avrebbe un campo visivo di 90 gradi. Il Lander rotante ha un campo visivo di 60 gradi e richiede 5 secondi di rotazione completare una vista di 90 gradi. Utilizzando 261 sondaggi, abbiamo selezionato dati di osservazione di pesce dai 5 secondi centrali di rotazioni di Lander per stabilire MaxN. Stime di densità per la pseudo-stazionario Lander sono stati standardizzati utilizzando le aree di copertura ridotte (cioè, circa ¼ della zona del Lander rotante). Differenze di densità media e coefficiente di variazione tra Landers rotanti e pseudo-stazionari sono state valutate con test t di Welch. Media densità ottenuti dalla telecamera rotante erano 18% superiore a quelli ottenuti con telecamere fisse (t21,7 di Welch, p = 0.081, Figura 8A). Inoltre, il coefficiente di variazione era 1,8 volte maggiore con la telecamera fissa rispetto alle telecamere di rotazione (t15,1 di Welch, p < 0,001, Figura 8).

Figura 5 : Selezionare specie osservato Distanze Z. Barre verticali rosse indicano la distanza minima di Z (0,81 m da telecamere) a sinistra e il valore di Z distanza 95% sulla destra. Si noti che questo rappresenta l'area di indagine efficace medio intorno il Lander per ciascuna specie. Clicca qui per visualizzare una versione più grande di questa figura.

Figura 6 : Bootstrap valori di distanza Z. L'avvio automatico per aumentare la dimensione del campione per le osservazioni di o. elongatus (A) S. wilsoni e (B). Dimensioni del campione da 3-300 sono stati 1.000 volte ogni bootstrap per calcolare la distanza media di 95% Z e verificare che le dimensioni del campione erano adeguate. Nota che i valori dell'asse y spaziano da 2,0-2,6 m per S. wilsoni e da 2.6-4.0 m per o. elongatus. Clicca qui per visualizzare una versione più grande di questa figura.

Figura 7 : Differenze di habitat per le specie selezionate due. A densità media (± SE) (A) S. wilsoni e (B) o. elongatus misurata sull'habitat di roccia bassa, medio e alto rilievo. Clicca qui per visualizzare una versione più grande di questa figura.

Figura 8 : Differenze tra rotante e pseudo-stazionario landers. Entrambe le stime di (A) dire densità (pesci/m2 ± SE) e (B) coefficiente di variazione (CV) ± SE per 261 sondaggi sono presentati. Clicca qui per visualizzare una versione più grande di questa figura.

Supplementare Video 1: verifica della calibrazione. Calibrazione può essere verificata prima dell'uso nel campo misurando bersagli di dimensioni note a varie distanze. Per favore clicca qui per vedere questo video. (Tasto destro per scaricare.)

Complementare dei Video 2: rilevamento subacqueo metraggio. Per favore clicca qui per vedere questo video. (Tasto destro per scaricare.)
Subscription Required. Please recommend JoVE to your librarian.
Discussion
La metrica MaxN tradizionale si basa sull'idea di contare un numero minimo garantito di individui presenti durante l'indagine. Se un certo numero di pesci visibili simultaneamente in un singolo fotogramma, non può esserci alcun meno presente, ma poiché i pesci sono mobili e distribuite in modo eterogeneo, la probabilità di vedere contemporaneamente tutti gli individui durante un singolo fotogramma del video è bassa . È quindi probabile che tradizionale MaxN sottovaluta pesce vero abbondanza16,17. Inoltre, è stato dimostrato che la tradizionale MaxN può visualizzare relazioni non lineari negativamente polarizzato con crescente pesce abbondanze16,18. Ciò può essere collegata al fenomeno della saturazione dell'ingranaggio per cui gli indici di abbondanza relativa non riescono a rilevare true aumenta in abbondanza19,20. Al contrario, la stabilità apparente di un indice con veramente in declino abbondanza di pesce è stata chiamata 'hyperstability' e in ultima analisi può portare al crash del pesce popolazioni21,22. Un recente studio ha riportato che l'instabilità in MaxN potrebbe essere alleviata aumentando l' indagine di campo16. In quello studio, il rapporto tra MaxN e vera abbondanza è diventato sempre più lineare come il campo visivo si avvicinò 100% (cioè, 360 gradi).
I risultati della simulazione di telecamera fissa indicano congruenza con questi risultati precedenti e suggeriscono che il valore di MaxN può caratterizzare meglio abbondanza di pesce. Ad esempio, il coefficiente medio stimato di varianza è stato ridotto fra densità stime derivate dal Lander rotante rispetto con il Lander pseudo-stazionario. Questo è probabilmente dovuto al fatto che pesce sono distribuite in modo eterogeneo, e che telecamere fisse sono più suscettibili di 'perdere' il pesce presente se il Lander si affaccia nella direzione sbagliata. Rotante Landers massimizzare lo sforzo di campionamento esaminando i 360 gradi attorno all'utensile, e l'effetto netto è riduzioni di costo di campionamento e varianza sia un aumento globale la potenza statistica dello studio. Gli studi futuri potrebbero affrontare meglio questo problema testando direttamente un Lander rotante con un separato Lander stazionario in un disegno di indagine accoppiati. Allo stesso modo, non siamo riusciti a verificare direttamente la relazione tra MaxN e vera abbondanza in questo studio, e gli studi futuri potrebbero verificarlo direttamente utilizzando sia simulazione o ambienti, controllati, come è stato fatto in Campbell (2015)16.
Una possibile critica dell'approccio MaxN modificata è la possibilità di doppi conteggio individui. Perché il Lander fatto una rotazione completa ogni minuto, e le specie bentoniche di interesse nell'ecosistema tendono ad essere relativamente sedentario e lento movimento sotto le condizioni più, crediamo che il rischio di doppio conteggio era basso. Inoltre, sono stati osservati casi in cui il pesce sarebbe entrare o lasciare l'area di indagine nel corso delle otto rotazioni. Ulteriori precauzioni per evitare il doppio conteggio ad esempio utilizzando la rotazione con il maggior numero di individui di un determinato genere di specie non identificata di contare. Altre metriche sono stati proposti come indici di abbondanza di pesce come dire totali; Tuttavia, questi troppo sono stati indicati a sottovalutare costantemente vera abbondanza mentre aumentando la variabilità fra densità stime16. MaxN raccomanda pertanto come una metrica più precisa dell'abbondanza di pesce. Mentre la nostra metrica MaxN modificata non garantisce una stima conservativa del numero minimo di individui, nel complesso siamo fiduciosi che questo approccio MaxN modificato fornisce stime migliori dell'abbondanza di pesce vero, e che il pesce sopra-conteggio è di preoccupazione relativamente basso.
Visione laterale molti video-transetto sondaggi uso un fisso transetto larghezza per stimare la densità per tutte le specie. Allo stesso modo, un approccio all'utilizzo di stereo-video Landers sarebbe utilizzare una massima distanza dalla telecamera per calcolare sia zona intervistati e densità di pesce. Entrambi possono portare a una sottostima delle specie che sono solo in modo affidabile identificabili a distanze inferiori rispetto il fisso transetto larghezza stime23. La distanza a cui una specie viene identificata in modo affidabile è causata dall'interazione di fattori quali dimensione, forma, modello di colorazione, comportamento dei pesci, nonché a fattori ambientali. Il metodo della distanza 95% Z è particolarmente vantaggioso in quanto rappresenta l'interazione di tutti questi fattori contemporaneamente. Ad esempio, o. elongatus era la specie che siamo in grado di identificare la distanza più grande, probabilmente grazie alla sua forma del corpo distinto, grande, allungato e tendenza comportamentale a posare sul fondo marino. Rosy Rockfish (Sebastes rosaceus) aveva una delle più brevi distanze Z, probabilmente perché, come membro del sottogenere Sebastomus , ha diversi congeneri che sembrano molto simili e sono difficili da distinguere a distanze maggiori. Consentendo specie-specifiche aree censite dal Lander del, ci potremmo essere in grado di stimare con maggiore precisione abbondanza di pesce. L'approccio bootstrap alla verifica delle dimensioni del campione è semplice e facilmente implementare in altre indagini, e crediamo che il metodo di 95% Z distanza potrebbe essere ulteriormente adattato per ospitare linea transetto disegno di indagine. 95% Z distanza rappresenterebbe quindi una distanza orizzontale di rilevamento affidabile per specie osservata con gli strumenti di veicolo sommergibile o gestito da remoto (ROV). In futuro, i ricercatori possono indagare utilizzando la teoria di campionamento di distanza alla densità del modello in funzione della rilevabilità con distanza23,24.
Come esiste un uso maggiore delle riserve di no-prendere in pesca gestione25,26,27, c'è un crescente bisogno di tecniche di campionamento non estrattivi, soprattutto in habitat di acque profonde non accessibile al subacqueo sondaggi. Tuttavia, è anche necessario che tali tecniche di forniscono dati accurati e affidabili sulla composizione di lunghezza, l'abbondanza e specie di pesci. Video Landers sono uno strumento relativamente nuovo che hanno un costo basso, può essere azionato su relativamente piccoli vasi di opportunità e sono logisticamente più semplice da usare di rov e sommergibili pur richiedendo meno e meno qualificato. Mentre non discusso in questi metodi, stereo-fotocamera Landers sono capaci di misurazioni di lunghezza precisa con un errore inferiore al 2%. Inoltre, Landers può essere rapidamente distribuito su vaste aree geografiche, aumentando di inferenza statistica. Ci aspettiamo che l'interesse per aumentare come ricerca agenzie look per stringere i bilanci e diffondere in modo più efficiente lo sforzo di campionamento di strumenti di monitoraggio video. Nostre modifiche MaxN e 95% Z distanza dovrebbe essere considerata in futuro ecologici studi che utilizzano rotante video Landers.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Gli autori non hanno nulla a rivelare
Acknowledgments
Questo lavoro è stato finanziato dal The Nature Conservancy e donatori privati, risorse Legacy Fund Foundation, Gordon e Betty Moore Foundation, Environmental Defense Fund, California Sea Grant Program, il programma nazionale della ricerca cooperativa NMFS e un NOAA Saltonstall-Kennedy Grant #13-SWR-008. Marino ricerca applicata e esplorazione (Dirk Rosen, Rick Botman, Andy Lauerman e David Jefferies) sviluppato, costruito e mantenuto il video strumento di Lander. Desideriamo ringraziare Jim Seager e SeaGIS™ software per il supporto tecnico. Capitano e pescatore commerciale Tim Maricich e membri dell'equipaggio a bordo il supporto di F/V Donna Kathleen fornito in distribuzione il Lander da 2012-2015. Grazie a tutti coloro che hanno partecipato nella raccolta di dati video o analisi (Anne Tagini, Donna Kline, lt. Amber Payne, Bryon Downey, Marisa Ponte, Rebecca Miller, Matt Merrifield, Walter Heady, Steve Rienecke, EJ Dick e John Field).
Materials
| Name | Company | Catalog Number | Comments |
| calibration cube | SeaGIS | http://www.seagis.com.au/hardware.html | 1000x1000x500 mm is the preferred dimensions. Other methods of calibration are available. |
| CAL calibration software | SeaGIS | http://www.seagis.com.au/bundle.html | |
| EventMeasure stereo measurement software | SeaGIS | http://www.seagis.com.au/event.html | |
| Statistical software | R Core Team 2017 (v. 3.4.0) | Bootstrapping code can be found: https://github.com/rfields2017/JoVE-Bootstrap-Function | |
| Spreadsheet Software | Microsoft Excel | ||
| 2 waterproof cameras | Deep Sea Power and Light | HD quality preferred | |
| 2 depth rated, waterproof lights | Deep Sea Power and Light : 3000 lumen LED with 5000k color temperature | ||
| DVR recorder | Stack LTD DVR | ||
| standard PC | Windows 10 preferred OS | ||
| rotating Lander platform | Marine Applied Research and Engineering (MARE) |
References
- Love, M. S., Yoklavich, M. M., Thorsteinson, L. K. The Rockfishes of the Northeast Pacific. , University of California Press. Berkley. (2002).
- Laidig, T. E., Watters, D. L., Yoklavich, M. M. Demersal fish and habitat associations from visual surveys on the central California shelf. Estuar. Coast. Shelf Sci. 83 (4), 629-637 (2009).
- Anderson, T. J., Yoklavich, M. M. Multiscale habitat associations of deepwater demersal fishes off central California. Fish. Bull. 105 (2), 168-179 (2007).
- Yoklavich, M. M., Cailliet, G. M., Sullivan, D. E., Lea, R. N., Love, M. S. Habitat associations deep-water rockfishes a submarine canyon an example of a natural refuge. Fish. Bull. 98 (3), 625-641 (2000).
- Status of the Pacific Coast Groundfish Fishery, Stock Assessment and Fishery Evaluation. , Pacific Fishery Management Council. Portland, OR. (2016).
- Cappo, M., Harvey, E., Malcolm, H., Speare, P. Potential of video techniques to monitor diversity, abundance and size of fish in studies of marine protected areas. Aquatic protected areas- What works best and how do we know. Beumer, J. P., Grant, A., Smith, D. C. , Proc. World Congr. on Aquat Protected Areas. Australian Soc. for Fish Bio. North Beach, Western Australia. 455-464 (2003).
- McLean, D. L., Green, M., Harvey, E. S., Williams, A., Daley, R., Graham, K. J. Comparison of baited longlines and baited underwater cameras for assessing the composition of continental slope deepwater fish assemblages off southeast Australia. Deep-Sea Research Part I: Oceanographic Research Papers. 98, 10-20 (2015).
- Parker, D., Winker, H., et al. Insights from baited video sampling of temperate reef fishes: How biased are angling surveys. Fish. Res. 179, 191-201 (2016).
- Boutros, N., Shortis, M. R., Harvey, E. S. A comparison of calibration methods and system configurations of underwater stereo-video systems for applications in marine ecology. Limnol. Oceanogr. Methodss. 13 (5), 224-236 (2015).
- Harvey, E. S., Cappo, M., Butler, J. J., Hall, N., Kendrick, G. A. Bait attraction affects the performance of remote underwater video stations in assessment of demersal fish community structure. Mar. Ecol. Prog. Ser. 350, 245-254 (2007).
- Watson, J. L., Huntington, B. E. Assessing the performance of a cost-effective video lander for estimating relative abundance and diversity of nearshore fish assemblages. J. Exp. Mar. Bio. Ecol. 483, 104-111 (2016).
- Easton, R. R., Heppell, S. S., Hannah, R. W. Quantification of Habitat and Community Relationships among Nearshore Temperate Fishes Through Analysis of Drop Camera Video. Mar. Coast. Fish. 7 (1), 87-102 (2015).
- Hannah, R. W., Blume, M. T. O. Tests of an experimental unbaited video lander as a marine fish survey tool for high-relief deepwater rocky reefs. J. Exp. Mar. Bio. Ecol. 430, 1-9 (2012).
- Starr, R. M., Gleason, M. G., et al. Targeting Abundant Fish Stocks while Avoiding Overfished Species: Video and Fishing Surveys to Inform Management after Long-Term Fishery Closures. Plos One. 11 (12), 0168645 (2016).
- Love, M. S. Certainly more than you want to know about the fishes of the Pacific Coast: a postmodern experience. , Really Big Press. Santa Barbara, CA. (2011).
- Campbell, M. D., Pollack, A. G., Gledhill, C. T., Switzer, T. S., DeVries, D. A. Comparison of relative abundance indices calculated from two methods of generating video count data. Fish. Res. 170, 125-133 (2015).
- Cappo, M., Speare, P., De'ath, G. Comparison of baited remote underwater video stations (BRUVS) and prawn (shrimp) trawls for assessments of fish biodiversity in inter-reefal areas of the Great Barrier Reef Marine Park. J. Exp. Mar. Bio. Ecol. 302 (2), 123-152 (2004).
- Schobernd, Z. H., Bacheler, N. M., Conn, P. B., Trenkel, V. Examining the utility of alternative video monitoring metrics for indexing reef fish abundance. Can. Jour. Fish. Aquat. Sci. 71 (3), 464-471 (2014).
- Hansen, M. J., Schorfhaar, R. G., Selgeby, J. H. Gill-Net Saturation by Lake Trout in Michigan Waters of Lake Superior. North Am. J. Fish. Manag. 18 (4), 847-853 (1998).
- Dauk, P. C., Schwarz, C. J. Catch estimation in the presence of declining catch rate due to gear saturation. Biometrics. 57 (1), 287-293 (2001).
- Hilborn, R., Walters, C. J. Quantitative Fisheries Stock Assessment Choice, Dynamics and uncertainty. , Springer. Dordrecht. (1992).
- Erisman, B. E., Allen, L. G., Claisse, J. T., Pondella, D. J., Miller, E. F., Murray, J. H. The illusion of plenty: hyperstability masks collapses in two recreational fisheries that target fish spawning aggregations. Can. Jour. Fish. Aquat. Sci. 68, 1705-1716 (2011).
- Buckland, S. T., Anderson, D. R., Burnham, K. P., Laake, J. L. Distance Sampling: Estimating abundance of biological populations. , Chapman and Hill. London. (1993).
- Ronconi, R. A., Burger, A. E. Estimating seabird densities from vessel transects: Distance sampling and implications for strip transects. Aquat. Bio. 4 (3), 297-309 (2008).
- Caselle, J. E., Rassweiler, A., Hamilton, S. L., Warner, R. R. Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected areas Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected. Nat. Publ. Gr. , 1-14 (2015).
- Starr, R. M., Wendt, D. E., et al. Variation in Responses of Fishes across Multiple Reserves within a Network of Marine Protected Areas in Temperate Waters. Plos One. 10 (3), 0118502 (2015).
- Lester, S., Halpern, B., et al. Biological effects within no-take marine reserves: a global synthesis. Mar. Ecol. Prog. Ser. 384, 33-46 (2009).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}