

Summary
Vi beskriver en ny metode for telling fisker og beregne relative overflod (MaxN) og fisk tetthet med roterende systemer, stereo-videokamera. Vi viser også hvordan du bruker avstand fra kameraet (Z avstand) for å anslå artsspesifikke detectability.
Abstract
Bruk av video kamera systemer i økologiske studier av fisk fortsetter å få veigrepet som levedyktig, ikke-extractive måling fisk lengder og estimering fisk overflod. Vi utviklet og implementert en roterende stereo-videokamera verktøy som dekker opptil 360 grader av sampling, noe som maksimerer prøvetaking innsats i forhold til stasjonære kameraet verktøy. En rekke studier har detaljert evne til statisk, stereo-kamera systemer vil ha svært nøyaktig og presis målinger av fisk; Her var utviklingen av metodologiske tilnærmingsmåter å kvantifisere fisk tetthet med roterende kamera systemer. Første tilnærmingen var å utvikle en modifikasjon av beregningen MaxN, som vanligvis er konservative antallet minimum antall fisk observert på en enkelt kamera undersøkelse. Vi omdefinere MaxN å være maksimalt antall fisk i gitt rotasjon av kameraet. Når forholdsregler er tatt for å unngå dobbelttelling, kan denne metoden for MaxN mer nøyaktig gjenspeiler ekte overflod enn som Hentet fra en fast kamera. Dernest fordi stereo-video gir fisk skal tilordnes i tre-dimensjonale rommet, finnes presise anslag på avstand fra kameraet for hver fisk. Ved 95% persentil observert avstanden fra kameraet for å etablere artsspesifikke områder kartlagt hensyn vi til forskjeller i detectability blant arter og unngå fortynne tetthet beregninger ved hjelp av Maksimumsavstanden Art var observert. Regnskap for denne rekke detectability er avgjørende for å nøyaktig beregne fisk dyp. Denne metoden vil lette integrering av roterende stereo-video verktøy i anvendt vitenskap og ledelse sammenhenger.
Introduction
Langs i US Pacific Coast er mange av artene viktig for kommersielle og fritidsaktiviteter groundfish Fiskeri (f.eksrockfish komplekse (vanlig spp.) og Lingcod (Ophiodon elongatus)) sterkt assosiert med høyt relieff, hard bunn habitater1,2,3,4,5. Stereo-video slipp kameraer er en attraktiv ikke-utvinnings-verktøy for steinete habitater relativ letthet og enkelheten i drift. En rekke stereo-kamera systemer er utviklet og distribuert i sørlige halvkule, grunt vann økosystemer6,7,8,9,10, og video slipp-kameraer har nylig fått trekkraft som et styringsverktøy for dypt vann steinete-reef miljøer langs Stillehavskysten11,12,13. Vi søkte å endre disse eksisterende stereo-kamera design ved hjelp av en stereo-video Kamerasystemet (heretter kalt "Lander") å karakterisere mer effektivt fiskebestander i høyt relieff seafloors langs den sentrale Stillehavet kysten (se tabell av Materialer). Lander brukt var annerledes enn eksisterende videosystemer fordi kameraene var montert en sentral roterende bar, som tillot en full 360° dekning av havbunnen slipp sted14. Lander fullført en full rotasjon per minutt, som tillot oss å raskt karakterisere overflod og samfunnet sammensetningen av et område og oppnå samme grad av statistisk styrke med færre Lander distribusjoner. (Se Starr (2016)14 for nærmere på informasjon om Lander konfigurasjonen). Foreløpige tester i studien systemet foreslo at åtte rotasjoner av kameraer i våre undersøkelser var tilstrekkelig til å karakterisere arter overflod og rikdom. Dette forsøket ble gjort av en observasjon av avtagende avkastning i arter overflod og fisk tetthet over lengre drops. Det anbefales at en pilotstudie inkludert lengre suge ganger gjennomføres i alle nye systemet for å fastslå den optimale suge tiden for en gitt økosystemet/studie art.
Ved hjelp av sammenkoblede stereo kameraer, både totalt undersøkelsesområdet og absolutt fisk tetthet kan beregnes for hver video undersøkelse; men nødvendiggjort bruk av roterende kamera endring av tradisjonelle fisk antall beregninger. Stasjonære videosystemer bruke oftest "MaxN" som konservative antall fisker på en distribusjon6,10. Tradisjonelle MaxN beskriver maksimalt antall fisk av artene observert sammen i en enkelt video rammen, for å unngå dobbelttelling en fisk som har forlatt og returnerte til rammen. MaxN er derfor et overslag over antallet fisk kjent finnes og kan undervurdere sant fisk overflod6,10. MaxN beregningen ble redefinert representerer det største antallet fisk i hver full rotasjon av kameraer.
Den andre endringen stereo video metodene var å ta hensyn til faktum at arter av ulik størrelse, farge, figurer har ulik maksimal avstand for pålitelig identifikasjon. For eksempel store arter som O. elongatus forskjellige avlang form og pålitelig kan identifiseres på større avstander sammenlignet med små og kryptiske arter som Squarespot Rockfish (vanlig hopkinsi). Disse ulike maksimal celleområder detectability endre effektiv området som er angitt av Lander til hver art. Ettersom stereo kameraene tillater oss å sette hver fisk i et tredimensjonalt rom med en høy grad av nøyaktighet, kan en bestemmer avstanden fra kameraer som hver fisk ble målt (dvs.den "Z avstanden", oppkalt etter den "z" som er vinkelrett på den rette linjen mellom kameraene). For hver art, avstanden som ble 95% av alle individer observert (heretter "95% Z avstand") ble ansett å være radius av undersøkelsesområdet, og ble brukt til å beregne det totale området kartlagt. I tillegg til artsspesifikke egenskaper, vil identifiability bli påvirket av miljøforhold som vann turbiditet. Siden disse faktorene kan variere i tid og rom, er det viktig å bruke 95% Z statistikk bare i samlet. Mens det vil være svært nøyaktig for store prøver, kan noen personlige Integritetsvurdering variere i området kartlagt.
Protokollen nedenfor gir veiledning om hvordan du oppretter og bruker disse beregningene. Selv om fokus var å karakterisere dypt vann steinete habitat langs Stillehavskysten, gjelder metodikk beskrevet for endret MaxN teller lett roterende slipp-kamera systemer. Antall kameraet rotasjoner nødvendig å karakterisere fiskebestander vil avhenge av lokale økosystemet dynamics, men konseptualisering av den endrede MaxN vil forbli den samme. Tilsvarende mens vi brukte 3D Fotogrammetrisk programvare for å analysere stereo videoinnhold, brukes teknikkene her lett på programvareplattformer, så lenge det akkurat plasseringen av fisk i et tredimensjonalt rom er mulig. I tillegg kan tilnærming for å bruke en 95% Z avstandsverdien betraktes i fremtiden studier med stereo-kameraer til kontoen artsspesifikke celleområder detectability og mer nøyaktig beregne fisk overflod.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
Merk: Skjermbilder programvare skritt tas som Supplerende filer. Merk at programvare trinnene beskrevet nedenfor gjelder for valgt programvare (se Tabell for materiale). Den generelle tilnærmingen kan utvides til enhver stereo programvareplattform.
1. klargjør Stereo-kameraet opptakene for analyse
Merk: Anbefales kalibrering bruker en kalibrering kube. En kalibrering kube er en tredimensjonal aluminiumsramme med nøyaktig plassert reflekterende prikker på overflaten. Når den brukes sammen med kalibreringsprogramvare, fører en kalibrering kube til større presisjon og nøyaktighet enn sjakkbrett tilnærminger9.
- Kalibrere Lander kameraer med stereo-kalibreringsprogramvare (figur 1 og figur 2; se Tabellen for materiale for en programvare anbefaling).
Merk: Kalibrering kan verifiseres før bruk i feltet ved å måle mål av kjente størrelser på ulike avstander (se utfyllende Video 1). Gjennomsnittlig målingen feil for en 50 cm-mål på avstander på 3 m (eller mindre) bør være innenfor 2% av kjente mål lengden. Også oppmerksom på at en gitt kalibrering bare skal gjelde hvis posisjoner ikke endres i forhold til hverandre. Det er viktig å ta vare og unngå utilsiktet jostling av kameraer til alle prøvetaking er utført. - Samle feltdata bruker kalibrert Lander (figur 1, utfyllende Video 2).
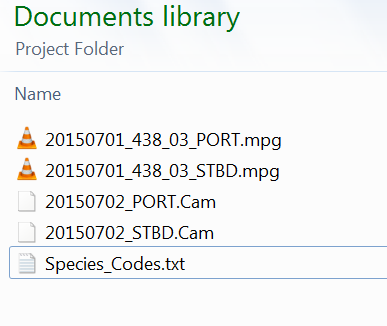
- Når feltet studien er fullført, kan du opprette en ny prosjektmappe som inneholder både video og kalibrering.
Merk: I hvert prosjekt mappen det må minst fem filer: venstre og høyre ". Cam"kalibrering filer, venstre og høyre video-filer (. MP4 eller. AVI format bare), og listen arter (txt-format). - I stereo måling programvaren, starte et nytt prosjekt for måling og laste riktig video og kalibrering filer.
Merk: Skjermbilder av alle programvare trinnene er tilgjengelig mellom Supplerende filer.- Naviger til 'Mål' > 'Ny måling fil'.
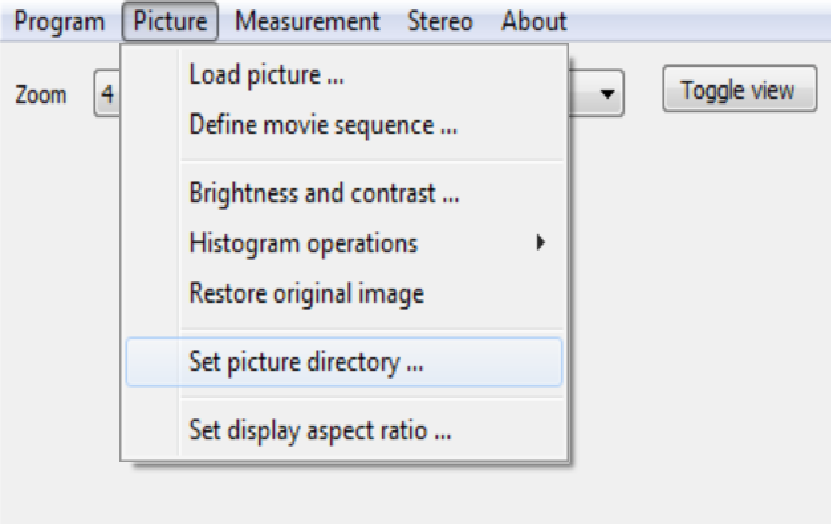
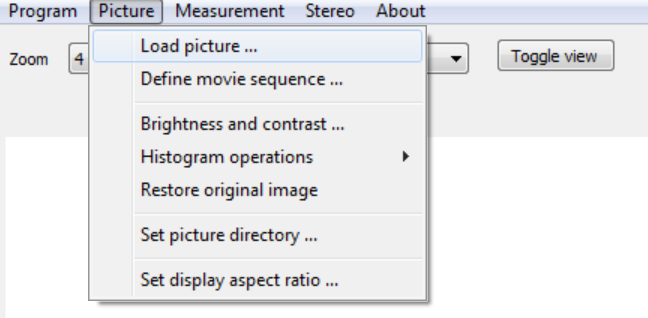
- Angi mappen bilde ved å navigere til 'Bilde' > 'sett bilde mappe', og velg mappen som inneholder alle prosjektfiler.
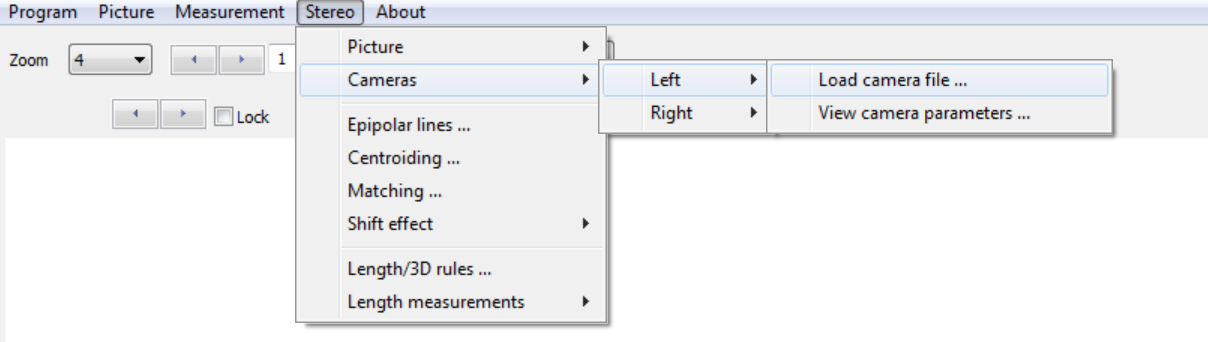
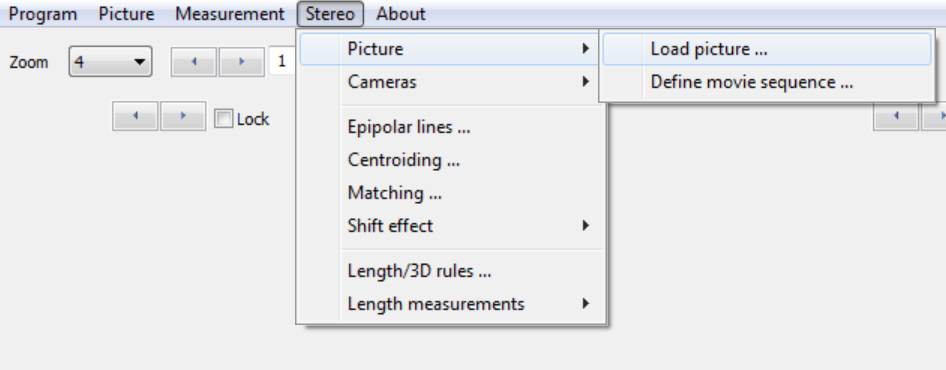
- Laste venstre kameraet ". Cam"fil ved å navigere til 'Stereo' > 'Kamera' > 'Venstre' > 'Load kameraet fil' og velge den aktuelle filen.
- Gjenta trinn 1.4.3 laste riktig kameraet ". Cam"fil
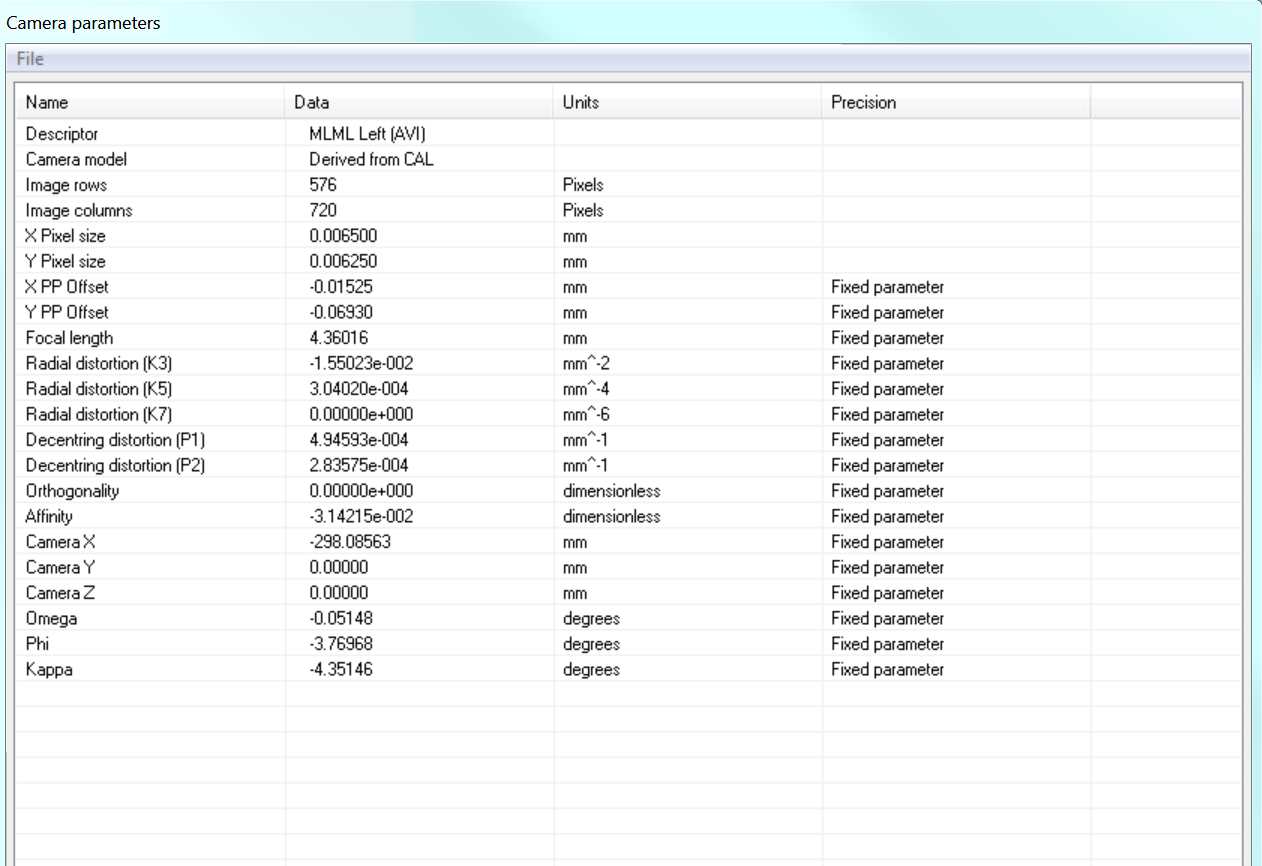
Merk: Disse filene inneholder kalibrering mål for hvert kamera (f.ekspikselstørrelsen størrelsesforhold, radial forvrengning, decentring forvrengning, etc.) og brukes til å måle fisk og beregne avstand-fra-kamera (dvs., Z avstand). - Definere filmen serien for venstre videofilen ved å navigere til 'Bilde' > "Definer film sekvens" og velge venstre kameraet videofilen.
- Laste ned venstre videofilen inn måling programvare ved å velge 'Bilde' > "load picture".
Merk: Pass på at "Lås" boksen ikke er avmerket før du legger videofiler. Dette gjør at både video lastes samtidig. - Definere film sekvens og laste videofil for riktig video bruke menyene 'Stereo' > 'bilde' > "Definer film sekvens" og "Stereo" > 'bilde' > "load picture".
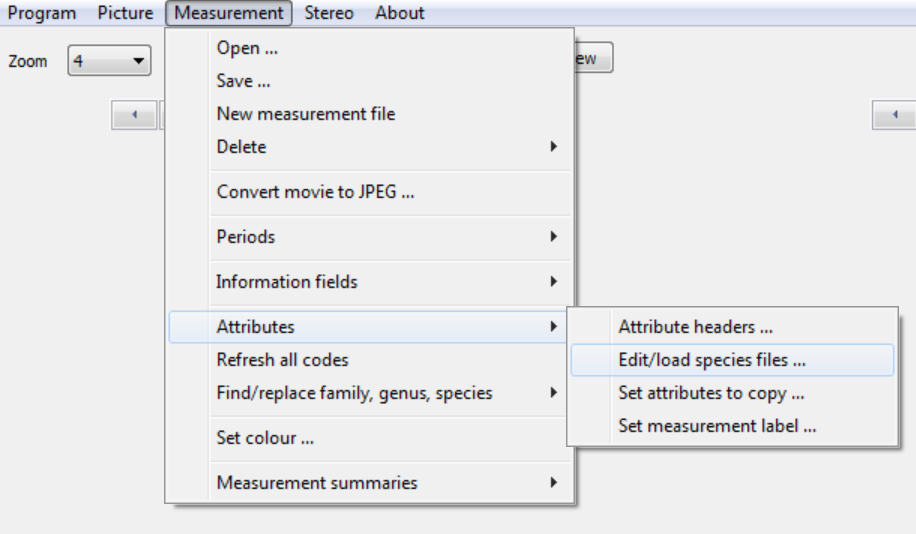
- Belaste det arter listen ved å navigere til 'Mål' > 'Attributter' > ' Rediger/belaste arter fil'.
- Angi undersøkelsen ID-informasjonen under "Informasjonsfelt" > "Endre verdien i feltet" og lagre filen til å opprette en. EMObs prosjekt.
- Synkronisere videoer med lyset blinker, handclap, Coordinated Universal Time (UTC) stempel eller noen gang bestemt hendelse som oppstår i både videoer.
- Hvis bruker UTC tidsangivelse, ramme-skritt fremover i venstre videoen til tidsangivelsen starter en ny andre. Annet bilderammen frem til lyset blinker eller handclap oppstår.
- Ramme-trinn rett video frem til tidsangivelsen samsvarer nøyaktig med venstre videoen. Annet ramme skritt fremover til det eksakte øyeblikket lyset blinker eller handclap samsvarer med venstre videoen.
Merk: Det er viktig at videoer synkroniseres til samme ramme. Video synkronisering bør kontrolleres jevnlig bruker video tidsangivelsen for å unngå kameraet rammen drift under analyse. Filmet hånd klapp kan også brukes ved begynnelsen og slutten av videoen for å teste at høyre og venstre videoer ble synkronisert til samme ramme.
- Velg knappen "Låse" videoer spille sammen og vedlikeholde synkronisering.
2. generere punkt teller og beregne MaxN
Merk: Hver fisk er først merket med en 2D til lavest mulig taksonomisk oppløsning. Fisk med usikker ID skal merkes for senere gjennomgang.
- Vente å telle fisk til slutten av en komplett Kamerarotasjon til å sikre at en 360 graders brukes. Også vente sediment avklart (vanligvis < 1-2 min etter kontakt med bunnen).
- Lander starter sin første rotasjon, høyreklikk for å definere en ny prøve periode: 'Periodedefinisjonene' > 'Legg til ny start periode'. Angi perioden fornavn som "01" og klikk "OK".
- Når Lander roterer, kan du begynne å merke hver fisk som kommer inn i rammen med en 2D bruker venstre kameraet bare.
- Hvis du vil legge til et 2D, høyreklikk, velg 'Legg til punkt' og velg riktig Artsnavnet. Etiketten til lavest mulig taksonomisk nivå, velge 'spp.' ukjent og klikk "OK".
- Fortsett å merke hver nye fisk etter trinn 2.2.1 av rotasjon.
- Gjenta protokollen prosedyrer 2.1-2.2 for hver ekstra Lander rotasjon - sikre at en ny periode er definert ved starten av hver kamerarotering.
Merk: Arter akkumulering kurver ble brukt til å bestemme at åtte rotasjoner var gjennomsnittlig tilstrekkelig å karakterisere fisk overflod studien. Forskere bør vurdere å gjennomføre foreløpige tester med ytterligere kameraet rotasjoner, over lengre tid suge, å karakterisere optimalt antall kameraet rotasjoner innenfor en bestemt økosystemet. - Beregne artsspesifikke antall individer observert kamerarotering.
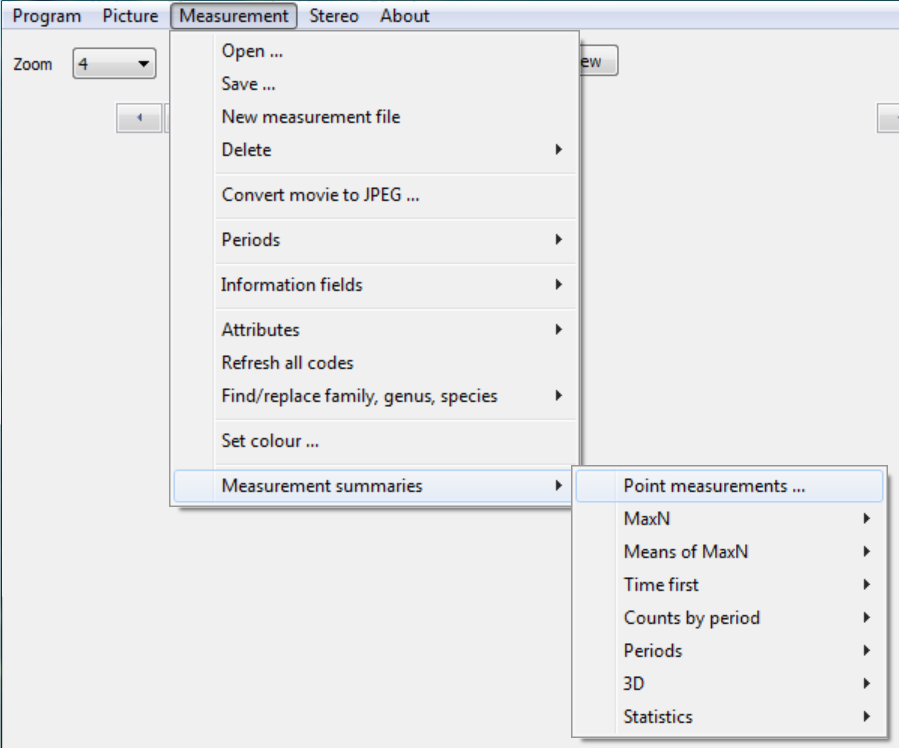
- Etter at alle rotasjoner har vært opplistede, eksportere 2D poeng ved å navigere til 'Mål' > 'Måling Sammendrag' > 'Punkt mål' og lagre 2D poeng som a.txt fil.
- Åpne filen lagret 2D.txt punkt som regneark og opprette en pivottabellrapport arter vs rotasjon for å oppsummere teller (tabell 1) ved å navigere til "Sett inn" > 'Pivottabell'. Velg "Slekten og artene" for "Radetikett" og "Periode" for "Etiketten".
- Velg MaxN for hver art ved å velge kamerarotering som har det største antallet individer av denne art (tabell 1).
- Velg en slekt nivå MaxN basert på rotasjon som hadde det største antallet personer identifisert arter i at bestemt slekten fisk identifiseres bare til slekten.
Merk: Dette trinnet bidrar til å unngå telle fisk som var bare identifiserbare til høyere taksonomisk grupper (f.eksbare til slekten eller familie). For eksempel i tabell 1, ' rotasjon 1 finnes 10 uidentifisert Sebastes spp. og 33 medlemmer av slekten Sebastes identifisert arter, mens "rotasjon 3 inneholdt bare to uidentifisert Sebastes spp. og 43 medlemmer av slekten Sebastes identifiserte arter. Derfor ' rotasjon 3 brukes for MaxN antall ukjente Sebastes spp. På denne måten den konservative forutsetningen er laget som 8 av de uidentifiserte Sebastes spp. i ' rotasjon 1 ble identifisert i ' rotasjon 8'. - Hvis flere rotasjoner har samme MaxN teller artene, velg første hopp med MaxN for 3D punkt målinger.
- For hver art, ta 3D-målinger av fisk i rotasjon som MaxN oppstod.
- Bruk lagrede 2D poeng samlet i trinn 2.1-2.3 for å navigere til nøyaktig samme fisken for 3D måling.
- Zoome inn minst 4 X bedre identifisere spissen av fisk snute og kantene av caudal finnene (Figur 3).
Merk: Det kan være nødvendig å ramme skritt fremover eller bakover for å finne den beste papirretningen fisken for en 3D måling. "Beste" retningen er en der både snute og kantene av caudal finnene er synlige i begge kameraene. - Manuelt klikke på spissen av snuten, deretter kanten av halen i venstre kameraet, så gjentagelse valget i samme rekkefølge i høyre videoen.
- Velg riktig arter identifikasjon rullegardinmenyer som i 2.2.1.
- Hvis en 3D lengdemåling ikke er mulig, for eksempel hvis hodet og halen av fisken ikke er synlige i begge kameraene, merker en 3D punkt i stedet ved venstre klikke samme posisjon av fisk i både venstre og høyre videoer. Fyll ut informasjonsfeltene som før og forlater kommentar "Utelukk fra lengdemåling".
Merk: MaxN kan oppstå på ulike rotasjoner av kameraer for ulike arter; men for noen bestemt arter, skal målinger oppstå i en rotasjon bare (tabell 1).
- Etter endt 3D mål for alle fisker, eksportere as.txt datafilen for videre analyse.
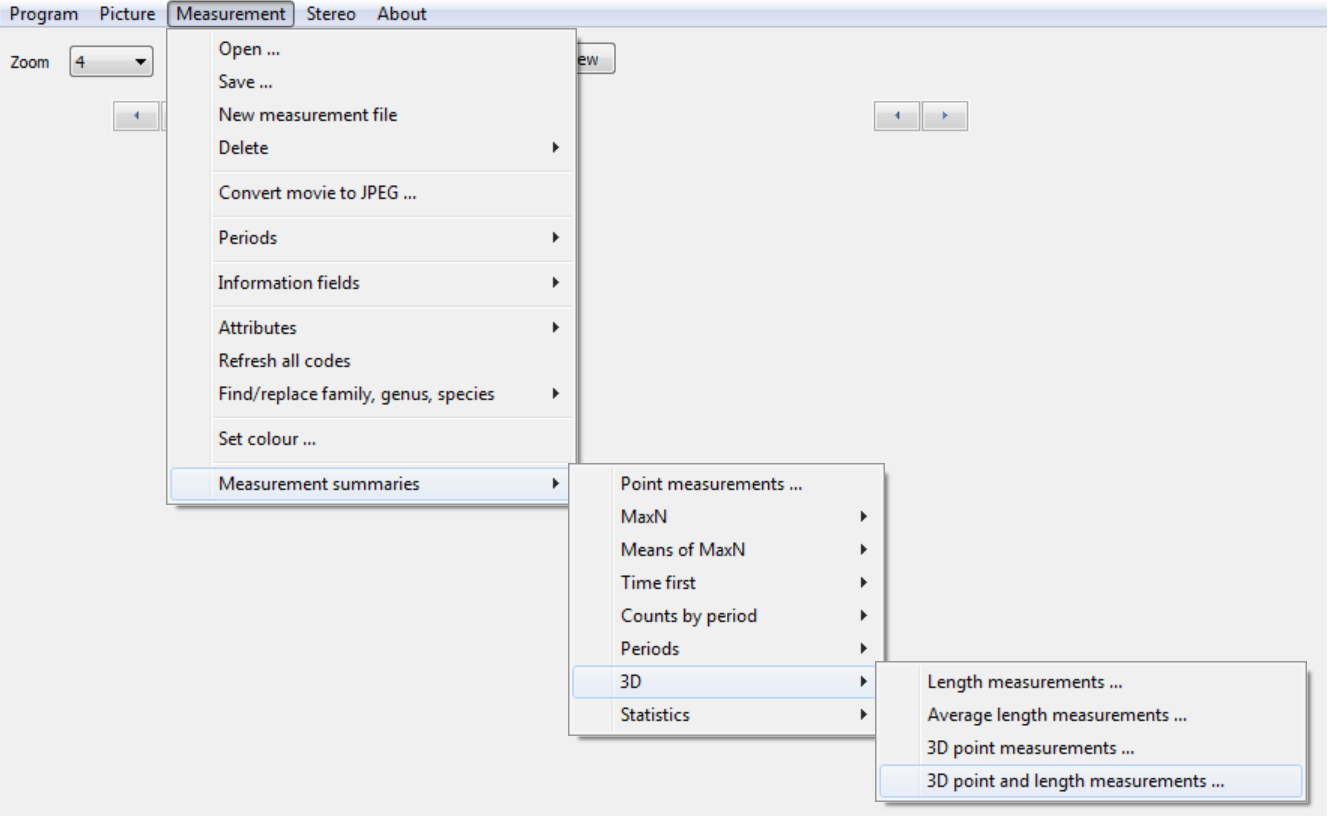
- Naviger til 'Mål' > 'Måling Sammendrag' > '3D punkt og lengde målinger' og save.txt fil som skal eksporteres.
3. 95% Z avstand prosedyre for artsspesifikke undersøkelsen områder
Merk: 95% Z avstand er et mål for den gjennomsnittlige avstanden en art kan pålitelig identifiseres i en gitt studie mens utenom tilfeller av eksepsjonell betingelser for vannkvalitet eller belysning. Beregningen tar hensyn til gjennomsnittlig oseanografiske betingelsene for en gitt studie, og må være re beregnet for hver nye studie.
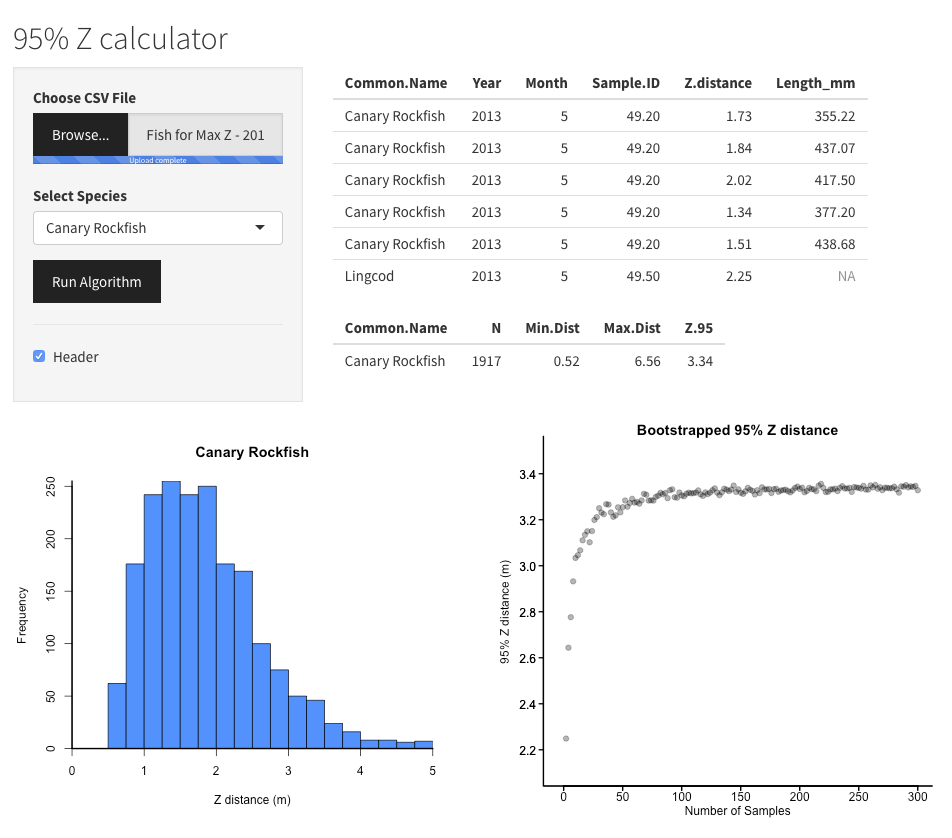
- Bruk enkle bootstrapping for å avgjøre om utvalgsstørrelsen er stor nok å karakterisere avstanden pålitelig gjenkjenning for hver art.
- For hver prøve størrelsesklasse (f.ekseksempel størrelse hyller av 5 fisk), ta 1000 tilfeldig trekker av valgte utvalgsstørrelsen erstatning fra populasjonsutvalg og beregne gjennomsnittet 95% quantile med avstander på disse 1000 trekker og tegne den resulterende asymptotisk kurve. Se medfølgende koden i ekstra filer 1 & 2.
- Kontroller at tilstrekkelig prøver ble oppnådd ved å sammenligne faktiske utvalgsstørrelsen med 95% Z avstand asymptoten med økende utvalgsstørrelsen.
- Beregne 95% Z avstandsverdien som 95% quantile målt for Art over alle undersøkelser av avstand fra kameraet.
- Beregne effektiv området undersøkt for hver art bruker 95% Z-verdien.
Merk: I en roterende Lander, 95% Z verdien representerer ytre radius av en undersøkte skjærer, med indre radius bestemmes av det fysiske oppsettet av verktøyet og hvor tett til basen kameraene er stand til å observere. Når Lander roterer, en 'smultring"formet undersøkelsesområdet er dannet (Figur 4).- Beregne areal kartlagt som:

Merk: For eksempel en relativt stor arter som Yelloweye Rockfish (vanlig ruberrimus) hadde en 95% Z avstand på 3,3 m og et effektiv undersøkelse 30.9 m2 per Lander distribusjon: 34.3 m2 (ytre sirkelen) - 3.4 m2 (indre sirkel) = 30.9 m2 (totalt undersøkelsesområdet).
- Beregne areal kartlagt som:
- Bruke beregnede området kartlagt (trinn 3.3.1), konvertere individuelle arter teller (MaxN) i tetthet estimater for hver visuell undersøkelse ved hjelp av formelen:

Merk: En liknende framgangsmåte kan brukes til å beregne en volumetriske tetthet i stedet for en områdetetthet; men er denne prosessen ikke beskrevet her.



Tabell 1: eksempel MaxN tabell. Utvalget av MaxN for hver art er vist med rød og fet tekst. Merk at en konservativ MaxN for uidentifisert Sebastes spp. ble bestemt av rotasjon med den mest vanlig identifisert arter (rotasjon 3). Også, mens denne studien brukt åtte kameraet rotasjoner, bare fire rotasjoner vises i tabell 1 for enkelhet. Prosessen for å velge MaxN er identisk uavhengig av antall rotasjoner.

Figur 1: Stereo video Lander. Nøkkel maskinvare nummereres (1) 300 m navle, (2) to digitale video-opptakere (DVR) med flyttbare 32 GB lagringskort inne vanntett flasken, (3) to LED lyser gi ut 3000 lumen på en fargetemperatur på 5000 K, og (4) to kameraer med 620 TV linje (TVL) oppløsning. Klikk her for å se en større versjon av dette tallet.

Figur 2: kalibrering kuben (500 mm x 500 x 300 mm). Eksempel på en kalibrering med en kalibrering kuben vises i to forskjellige retninger: (A) høyre side av kuben er skjøvet mot kameraer, og (B) på forsiden av kuben er parallell i ansiktet av kameraer. Røde prikkene betegne referansepunktene brukes i denne spesielle kalibrering metoden og må alltid være identifisert i nummererte rekkefølge. Klikk her for å se en større versjon av dette tallet.

Figur 3: 3D måling plassert på vanlig miniatus. Spissen av snuten og slutten av halen ble identifisert i hver kameraet rammen å tillate stereo måling. Klikk her for å se en større versjon av dette tallet.

Figur 4: området undersøkt av verktøyet Lander. Effektiv området undersøkt av verktøyet Lander grenset minimum Z avstand og 95% Z avstanden til hver art. Merk at dette området opprettet et 'bolle' formet undersøkelsen volum rundt Lander. Klikk her for å se en større versjon av dette tallet.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Mellom 2013 og 2014 regner gjennomførte vi 816 undersøkelser med roterende stereo-video Lander (figur 1) langs sentrale California kysten og innsamlede MaxN og 95% Z avstand (Figur 4) data på mer enn 20 arter. Det var klart mønstre i effektiv synlig rekke arter observert, sannsynligvis på grunn av samspillet av arter størrelse, form og farge (figur 5). For eksempel har flagget Rockfish (vanlig rubrivinctus) forskjellige striper på sidene slik at trygg identifikasjon på større avstander enn andre arter av tilsvarende størrelse. Tilsvarende Canary Rockfish (vanlig pinniger) er relativt store fylde, men har en pigmentering som ligner andre arter, dermed gjør det vanskeligere å identifisere avstand (figur 5).
Vi bruker to arter for å demonstrere beregningene av både MaxN og 95% Z avstand verdier: Pygmy Rockfish (vanlig wilsoni) og Lingcod (O. elongatus). Førstnevnte er en små-bodied fisk som kan være vanskelig å identifisere avstand; mens O. elongatus er relativt store, har en tydelig form, og er mer lett identifiserbare. Fra 2013-2014, ble 1,191 mål for S. wilsoni og 1,222 mål for O. elongatus samlet. Deretter på 95% quantiles av avstander som disse artene ble observert: 95% Z distansene ble 2.65 m for S. wilsoni og 3.96 m for O. elongatus (figur 5) ble beregnet. Disse 95% Z avstander oversette til effektiv undersøkelse områder av 18.6 m2 og 46.0 m2 for S. wilsoni og O. elongatus, henholdsvis. En enkel bootstrap analyse bekreftet at tilstrekkelig utvalg størrelser ble innhentet for kategorisering av 95% Z avstand-verdier. For begge to Art, estimatet 95% Z avstand stabilisert når større enn 50 undersøkelser som inneholder disse artene ble valgt, gir sterke bevis for at de valgte utvalgene var mer enn tilstrekkelig til å karakterisere det effektive Lander området for disse arter (figur 6).
MaxN antall per undersøkelse ble da omgjort til tettheter (antall fisk/m2). Vi brukte tetthet anslag fra 816 undersøkelsene for å teste hypotesen Lingcod det og Pygmy Rockfish ville være observert på høyt relieff habitater. For begge to Art, var det betydelig større tettheter over høy og middels lettelse sammenlignet med lavt relieff habitater (Kruskal-Wallis, p <<. 001; Figur 7). Disse resultatene var i samsvar med tidligere rapportert habitat foreninger for begge arter15. Det var ingen forskjeller mellom medium og høyt relieff habitat for enten arter.
For å forstå hvordan den roterende Lander sammenlignet med tradisjonelle stasjonære kamera systemer, beregnet vi forskjeller i tetthet og variasjon anslår mellom en roterende og en simulert stasjonære Lander. Antok vi en typisk stasjonær enkelt kameraet Lander ville ha en 90-graders synsfelt. Den roterende Lander har en 60 graders synsfelt, og krever 5 sekunder av rotasjon for å fullføre en 90-graders visning. Bruke 261 undersøkelser, valgte vi fisk observasjon data fra midten 5 sekunder Lander rotasjoner å etablere MaxN. Tetthet estimater for pseudo stasjonære Lander ble standardisert ved hjelp av redusert områdene dekning (dvs.ca ¼ området av den roterende Lander). Forskjeller i gjennomsnittlig tetthet og variasjonskoeffisienten mellom roterende og pseudo stasjonære Landers ble evaluert med Welch's t-test. Mener tettheter ved roterende kameraet var 18% større enn de med stasjonære kameraer (Welch's t21,7, p = 0.081, Figur 8A). I tillegg variasjonskoeffisienten var 1,8 ganger større med stasjonære kameraet i forhold til roterende kamera (Welch's t15.1, p < 0,001, Figur 8).

Figur 5 : Z avstander observert i Velg arter. Rød vertikalstreker betegne Z minsteavstand (0.81 m fra kameraer) til venstre og 95% Z avstand verdien til høyre. Merk at dette representerer gjennomsnittlig effektiv undersøkelsesområdet rundt Lander til hver art. Klikk her for å se en større versjon av dette tallet.

Figur 6 : Bootstrapped Z avstand verdier. Ved oppstart for å øke utvalgsstørrelsen for (A) S. wilsoni og (B) O. elongatus observasjoner. Utvalgene oppstiller fra 3-300 var bootstrapped 1000 ganger hver for å beregne gjennomsnittlig 95% Z avstanden og kontrollere utvalgene var tilstrekkelig. Merk at y-verdier spenner fra 2.0-2,6 m for S. wilsoni og 2.6-4.0 m for O. elongatus. Klikk her for å se en større versjon av dette tallet.

Figur 7 : Habitat forskjellene for to Velg arter. Gjennomsnittlig tettheter (± SE) (A) S. wilsoni og (B) O. elongatus målt på lav, middels og høyt relieff rock habitat. Klikk her for å se en større versjon av dette tallet.

Figur 8 : Forskjeller mellom roterende og pseudo stasjonære landers. Begge estimater for (A) at tetthet (fisk/m2 ± SE) og (B) mener koeffisient av variant (CV) ± SE 261 undersøkelser presenteres. Klikk her for å se en større versjon av dette tallet.

Supplerende Video 1: kalibrering bekreftelse. Kalibreringen kan verifiseres før bruk i feltet ved å måle mål av kjente størrelser på ulike avstander. Vennligst klikk her å se denne videoen. (Høyreklikk for å laste ned.)

Supplerende Video 2: undervanns undersøkelsen opptakene. Vennligst klikk her å se denne videoen. (Høyreklikk for å laste ned.)
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Tradisjonelle MaxN beregning forutsetter på ideen om å telle en garantert minimum antall personer under en undersøkelse. Hvis et visst antall fisk vises samtidig i en enkelt video rammen, det kan ikke være noen færre dag, men fordi fisk er mobile og heterogeneously distribuert, sannsynligheten for å se alle personer samtidig under en enkelt video rammen er lav . Det er derfor sannsynlig at tradisjonelle MaxN undervurderer sant fisk overflod16,17. I tillegg har det vist seg at tradisjonelle MaxN kan vise ikke-lineære negativt-partisk relasjoner med økende fisk krillens16,18. Dette kan være relatert til fenomenet gear metning der relative overflod indekser mislykkes i å oppdage sanne øker i overflod19,20. Omvendt, tydelig stabiliteten i en indeks med synkende virkelig fisk overflod har blitt kalt 'hyperstability', og kan til slutt føre til krasj av fisken befolkningen21,22. En fersk studie rapportert at ustabilitet i MaxN kan lindres ved å øke de undersøkte synsfelt16. I denne studien ble forholdet mellom MaxN og ekte overflod stadig lineær som synsfelt nærmet seg 100% (dvs., 360 grader).
Resultatene fra stasjonære kameraet simuleringen angir kongruens med disse tidligere resultater, og foreslår at MaxN verdien kan bedre beskrive fisk overflod. For eksempel ble beregnet mean koeffisient av varians redusert blant tetthet anslag fra den roterende Lander sammenlignet med pseudo stasjonære Lander. Dette er sannsynlig skyldes at fisk distribueres heterogeneously, og at stasjonære kameraer er mer sannsynlig å 'savner"fisken tilstede hvis Lander ansikter feil retning. Roterende Landers maksimere prøvetaking arbeidet ved oppmåling full 360 grader rundt verktøyet, og resultatet er reduksjoner til både prøvetaking kostnader og avvik, og en generell økning i statistiske kraft av studien. Fremtidige studier kan bedre løser dette problemet ved å teste direkte en roterende Lander med en egen stasjonære Lander i et par undersøkelse design. Tilsvarende kan ikke direkte teste forholdet mellom MaxN og ekte overflod i denne studien, og fremtidige studier direkte kan teste dette ved hjelp av enten simulering eller kontrollert miljøer, som ble gjort i Campbell (2015)16.
En mulig kritikk av modifisert MaxN tilnærming er muligheten til å doble telle individer. Fordi Lander gjort en full rotasjon per minutt, og de bentiske artene av interesse i økosystemet pleier å være relativt stillesittende og langsom bevegelse under de fleste forhold, tror vi risikoen for dobbelttelling var lav. I tillegg ble tilfeller der fisk ville gå inn eller forlate undersøkelsesområdet i løpet av åtte rotasjoner observert. Forholdsregler å unngå doble telle som bruker rotasjon med det største antallet individer av en gitt slekt telle uidentifisert arter ble tatt. Andre beregninger foreslått som indekser fisk overflod som betyr teller; men har dette også vist å konsekvent undervurdere sant overflod mens øke variasjonen mellom tetthet anslår16. MaxN anbefales derfor som en mer nøyaktig beregning av fisk overflod. Mens vår endret MaxN beregning ikke garanterer et forsiktig anslag av absolutte minimum antall personer, er vi samlet sikre at denne endrede MaxN tilnærmingen gir bedre estimater for ekte fisk overflod, og at over telling fisk er relativt lav bekymring.
Mange side-visning-mudderbunn undersøkelser bruk en fast mudderbunn for å beregne tettheten for alle arter. Tilsvarende ville en tilnærming til å bruke stereo-video Landers være å bruke en maksimal avstand fra-kameraet til å beregne både området kartlagt og fisk tetthet. Begge kan føre til lavt arter som kun pålitelig identifiserbare til mindre avstander enn den faste mudderbunn bredde estimater23. Avstanden som identifiseres pålitelig Art forårsakes av samspillet av faktorer som størrelse, form, farge mønster, fisk atferd, samt miljøfaktorer. Metoden 95% Z avstand er spesielt fordelaktig ved at det står for samspillet av alle disse faktorene samtidig. For eksempel, var O. elongatus artene som vi er i stand til å identifisere den største avstanden, sannsynligvis som følge av sin distinkte, store, forlenge kroppsform og atferdsmessige tendens til å legge på havbunnen. Rosenrød Rockfish (vanlig rosaceus) hadde en av de korteste Z avstandene, sannsynligvis fordi, som medlem av Sebastomus subgenus, den har flere kongenere som ligner og er vanskelig å skille på økt avstander. Tillater for artsspesifikke områdene undersøkt av Lander, kanskje vi kunne mer nøyaktig beregne fisk overflod. Bootstrap tilnærming til prøven størrelsen bekreftelse er enkel og lett implementert i andre undersøkelser, og vi tror metoden 95% Z avstand kan tilpasses ytterligere til linje mudderbunn undersøkelse design. 95% Z avstand deretter representere en vannrett avstand for pålitelig påvisning arter observert med nedsenkbare eller fjernstyrt kjøretøy (ROV) verktøy. I fremtiden, kan forskere undersøke ved hjelp avstand prøvetaking teorien modell tetthet som en funksjon av detectability med avstand23,24.
Som det er økt bruk av no-ta reserver i fiskeri ledelsen25,26,27, er det en økende behov for ikke-extractive prøvetaking teknikker, spesielt i dypt vann habitat ikke tilgjengelig for dykker undersøkelser. Imidlertid er det også nødvendig at disse teknikkene gi nøyaktige og pålitelige data om fisk lengde, overflod og arter komposisjon. Video Landers er en relativt ny overvåkingsverktøy som har en lav kostnad, kan brukes på relativt små fartøy av opportunity og er logistisk enklere å betjene enn ROV og nedsenkbare krever færre og mindre dyktige personell. Mens ikke diskutert i disse metodene, er stereo-kamera Landers i stand til nøyaktig lengdemål med feil mindre enn 2%. I tillegg kan Landers distribueres raskt over store geografiske områder øker statistisk inferens. Vi forventer interessen video avlytting verktøy å øke som forskning organisasjoner utseende stramme budsjetter og mer effektivt spre prøvetaking innsats. Våre modifikasjon av MaxN og 95% Z avstand bør vurderes i fremtiden økologiske studier utnytte roterende video Landers.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Forfatterne ikke avsløre
Acknowledgments
Dette arbeidet ble finansiert av The Nature Conservancy og private givere, ressurser Legacy fondet Foundation, Gordon og Betty Moore Foundation, Environmental Defense Fund, California havet Grant Program, NMFS National Cooperative Research Program og en NOAA Saltonstall-Kennedy tildeling #13-SWR-008. Anvendt forskning og leting (Dirk Rosen, Rick Botman, Andy Lauerman og David Jefferies) utviklet, bygget og vedlikeholdt verktøyet video Lander. Vi takke Jim Seager og SeaGIS™ programvare for kundestøtte. Kaptein og kommersielle fisker Tim Maricich og mannskapet ombord F/V Donna Kathleen gitt støtte i distribusjon Lander fra 2012-2015. Takk til alle som deltok i video innsamling eller analyse (Anne Tagini, Donna Kline, lt Amber Payne, Bryon Downey, Marisa Ponte, Rebecca Miller, Matt Merrifield, Walter Heady, Steve Rienecke, EJ Dick og John Field).
Materials
| Name | Company | Catalog Number | Comments |
| calibration cube | SeaGIS | http://www.seagis.com.au/hardware.html | 1000x1000x500 mm is the preferred dimensions. Other methods of calibration are available. |
| CAL calibration software | SeaGIS | http://www.seagis.com.au/bundle.html | |
| EventMeasure stereo measurement software | SeaGIS | http://www.seagis.com.au/event.html | |
| Statistical software | R Core Team 2017 (v. 3.4.0) | Bootstrapping code can be found: https://github.com/rfields2017/JoVE-Bootstrap-Function | |
| Spreadsheet Software | Microsoft Excel | ||
| 2 waterproof cameras | Deep Sea Power and Light | HD quality preferred | |
| 2 depth rated, waterproof lights | Deep Sea Power and Light : 3000 lumen LED with 5000k color temperature | ||
| DVR recorder | Stack LTD DVR | ||
| standard PC | Windows 10 preferred OS | ||
| rotating Lander platform | Marine Applied Research and Engineering (MARE) |
References
- Love, M. S., Yoklavich, M. M., Thorsteinson, L. K. The Rockfishes of the Northeast Pacific. , University of California Press. Berkley. (2002).
- Laidig, T. E., Watters, D. L., Yoklavich, M. M. Demersal fish and habitat associations from visual surveys on the central California shelf. Estuar. Coast. Shelf Sci. 83 (4), 629-637 (2009).
- Anderson, T. J., Yoklavich, M. M. Multiscale habitat associations of deepwater demersal fishes off central California. Fish. Bull. 105 (2), 168-179 (2007).
- Yoklavich, M. M., Cailliet, G. M., Sullivan, D. E., Lea, R. N., Love, M. S. Habitat associations deep-water rockfishes a submarine canyon an example of a natural refuge. Fish. Bull. 98 (3), 625-641 (2000).
- Status of the Pacific Coast Groundfish Fishery, Stock Assessment and Fishery Evaluation. , Pacific Fishery Management Council. Portland, OR. (2016).
- Cappo, M., Harvey, E., Malcolm, H., Speare, P. Potential of video techniques to monitor diversity, abundance and size of fish in studies of marine protected areas. Aquatic protected areas- What works best and how do we know. Beumer, J. P., Grant, A., Smith, D. C. , Proc. World Congr. on Aquat Protected Areas. Australian Soc. for Fish Bio. North Beach, Western Australia. 455-464 (2003).
- McLean, D. L., Green, M., Harvey, E. S., Williams, A., Daley, R., Graham, K. J. Comparison of baited longlines and baited underwater cameras for assessing the composition of continental slope deepwater fish assemblages off southeast Australia. Deep-Sea Research Part I: Oceanographic Research Papers. 98, 10-20 (2015).
- Parker, D., Winker, H., et al. Insights from baited video sampling of temperate reef fishes: How biased are angling surveys. Fish. Res. 179, 191-201 (2016).
- Boutros, N., Shortis, M. R., Harvey, E. S. A comparison of calibration methods and system configurations of underwater stereo-video systems for applications in marine ecology. Limnol. Oceanogr. Methodss. 13 (5), 224-236 (2015).
- Harvey, E. S., Cappo, M., Butler, J. J., Hall, N., Kendrick, G. A. Bait attraction affects the performance of remote underwater video stations in assessment of demersal fish community structure. Mar. Ecol. Prog. Ser. 350, 245-254 (2007).
- Watson, J. L., Huntington, B. E. Assessing the performance of a cost-effective video lander for estimating relative abundance and diversity of nearshore fish assemblages. J. Exp. Mar. Bio. Ecol. 483, 104-111 (2016).
- Easton, R. R., Heppell, S. S., Hannah, R. W. Quantification of Habitat and Community Relationships among Nearshore Temperate Fishes Through Analysis of Drop Camera Video. Mar. Coast. Fish. 7 (1), 87-102 (2015).
- Hannah, R. W., Blume, M. T. O. Tests of an experimental unbaited video lander as a marine fish survey tool for high-relief deepwater rocky reefs. J. Exp. Mar. Bio. Ecol. 430, 1-9 (2012).
- Starr, R. M., Gleason, M. G., et al. Targeting Abundant Fish Stocks while Avoiding Overfished Species: Video and Fishing Surveys to Inform Management after Long-Term Fishery Closures. Plos One. 11 (12), 0168645 (2016).
- Love, M. S. Certainly more than you want to know about the fishes of the Pacific Coast: a postmodern experience. , Really Big Press. Santa Barbara, CA. (2011).
- Campbell, M. D., Pollack, A. G., Gledhill, C. T., Switzer, T. S., DeVries, D. A. Comparison of relative abundance indices calculated from two methods of generating video count data. Fish. Res. 170, 125-133 (2015).
- Cappo, M., Speare, P., De'ath, G. Comparison of baited remote underwater video stations (BRUVS) and prawn (shrimp) trawls for assessments of fish biodiversity in inter-reefal areas of the Great Barrier Reef Marine Park. J. Exp. Mar. Bio. Ecol. 302 (2), 123-152 (2004).
- Schobernd, Z. H., Bacheler, N. M., Conn, P. B., Trenkel, V. Examining the utility of alternative video monitoring metrics for indexing reef fish abundance. Can. Jour. Fish. Aquat. Sci. 71 (3), 464-471 (2014).
- Hansen, M. J., Schorfhaar, R. G., Selgeby, J. H. Gill-Net Saturation by Lake Trout in Michigan Waters of Lake Superior. North Am. J. Fish. Manag. 18 (4), 847-853 (1998).
- Dauk, P. C., Schwarz, C. J. Catch estimation in the presence of declining catch rate due to gear saturation. Biometrics. 57 (1), 287-293 (2001).
- Hilborn, R., Walters, C. J. Quantitative Fisheries Stock Assessment Choice, Dynamics and uncertainty. , Springer. Dordrecht. (1992).
- Erisman, B. E., Allen, L. G., Claisse, J. T., Pondella, D. J., Miller, E. F., Murray, J. H. The illusion of plenty: hyperstability masks collapses in two recreational fisheries that target fish spawning aggregations. Can. Jour. Fish. Aquat. Sci. 68, 1705-1716 (2011).
- Buckland, S. T., Anderson, D. R., Burnham, K. P., Laake, J. L. Distance Sampling: Estimating abundance of biological populations. , Chapman and Hill. London. (1993).
- Ronconi, R. A., Burger, A. E. Estimating seabird densities from vessel transects: Distance sampling and implications for strip transects. Aquat. Bio. 4 (3), 297-309 (2008).
- Caselle, J. E., Rassweiler, A., Hamilton, S. L., Warner, R. R. Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected areas Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected. Nat. Publ. Gr. , 1-14 (2015).
- Starr, R. M., Wendt, D. E., et al. Variation in Responses of Fishes across Multiple Reserves within a Network of Marine Protected Areas in Temperate Waters. Plos One. 10 (3), 0118502 (2015).
- Lester, S., Halpern, B., et al. Biological effects within no-take marine reserves: a global synthesis. Mar. Ecol. Prog. Ser. 384, 33-46 (2009).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}