

Summary
Мы опишем новый метод для подсчета рыб и оценки относительного изобилия (MaxN) и плотность рыбы с использованием вращающихся систем стерео видео камеры. Мы также демонстрируют, как использовать расстояние от камеры (расстояние Z) для оценки вегетационных обнаруживаемости.
Abstract
Использование систем видео камеры в экологических исследованиях рыб по-прежнему набрать обороты как жизнеспособной, недобывающих метод измерения длины рыбы и оценки изобилие рыбы. Мы разработали и внедрили вращающегося инструмента стерео видео камеры, который охватывает полный 360 градусов выборки, который максимизирует усилия выборки, по сравнению с инструментов стационарные камеры. Целый ряд исследований подробно статические, стерео камеры систем возможность получения очень точной и точные измерения рыбы; Здесь акцент был сделан на разработке методологических подходов к количественной оценки плотности рыбы с использованием вращающихся систем видеонаблюдения. Первый подход было разработать модификацию метрики, MaxN, который обычно является консервативной количество минимальное количество рыб наблюдается на обследование камеры. Мы пересмотреть MaxN быть максимальное количество рыбы в любой заданной вращение камеры системы. Когда меры предосторожности во избежание двойного учета, этот метод MaxN может более точно отражать истинного изобилия чем полученные от фиксированной камеры. Во-вторых потому что стерео видео позволяет рыбы должны быть сопоставлены в трехмерном пространстве, точные оценки расстояния от камеры можно получить для каждой рыбы. С помощью персентили 95% наблюдаемых расстояния от камеры для установления вегетационных обследованных районах, мы объяснить различия в обнаруживаемость среди видов избегая разбавления оценки плотности, используя максимальное расстояние, на которое был вид отмечено. Бухгалтерский учет для этого диапазона обнаруживаемость имеет решающее значение для точно оценить обилия рыбы. Эта методология будет способствовать интеграции вращающихся инструментов стерео видео в прикладной науки и управления контекстах.
Introduction
Вдоль тихоокеанского побережья США многие из видов важно донной коммерческого и рекреационного рыболовства (например, морского окуня комплекс (Sebastes spp.) и Lingcod (Ophiodon удлинённый)) прочно ассоциируется с горельеф, твердое дно обитания1,2,3,4,5. Стерео видео падение камеры являются привлекательным недобывающих инструментом для использования в скалистых местах обитания из-за относительной легкости и простота в эксплуатации. Разнообразные системы стерео видео камеры разработаны и развернуты в Южном полушарии, мелководные экосистемы6,,78,9,10, и Недавно видео падения камеры получили тяги как инструмент управления для глубоководных сред скалистых рифов вдоль тихоокеанского побережья11,12,13. Мы стремились изменить эти существующие конструкции стерео камеры с помощью стерео видео камеры системы (далее именуемые как «Ландер») более эффективно охарактеризовать популяций рыб в seafloors горельеф вдоль побережья центральной части Тихого океана (см. таблицы Материалы). Спускаемый аппарат используется был отличается от существующих систем видео, потому что камеры были установлены в центральной вращающейся бар, что позволило полный 360° охвата морского дна на месте падения14. Спускаемый аппарат завершен один полный оборот в минуту, что позволило нам быстро характеризуют изобилия и состав сообществ области и достичь того же уровня статистической мощности с меньшим количеством Lander развертывания. (См.14 Старр (2016) для более подробно об особенностях Lander конфигурации). Предварительные испытания в системе изучения предложил, что восемь вращений камеры в наших обследований были достаточно, чтобы характеризовать видовое разнообразие и богатство. Это определение было сделано наблюдение убывающей доходности видовое разнообразие и плотность рыбы над больше капель. Мы рекомендуем провести экспериментальное исследование, включая больше раз вымочить в любой новой системе для определения оптимального замочить времени для данной экосистемы/исследование видов.
С помощью парных стерео камер, оба обследования площадь и плотность абсолютной рыбы может рассчитываться для каждого видео обследования; Однако использование вращающихся камеры требует модификации традиционных рыбы фото метрик. Стационарные системы видео наиболее часто используют «MaxN» как консервативной количество рыб на развертывание6,10. Традиционные MaxN описывает максимальное количество рыбы данного вида, наблюдается вместе в один кадр видео, во избежание двойного учета рыбу, которая ушел и вернулся в кадр. MaxN таким образом оценку минимальное количество рыб, известных присутствовать и могут недооценивать правда рыба изобилии6,10. MaxN метрики была пересмотрена представлять наибольшее количество рыбы, видели в каждом полное вращение камеры.
Вторая модификация предыдущей стерео видео методов было учитывать тот факт, что видов различных размеров, цвета, и фигуры имеют разные максимальные расстояния надежной идентификации. Например крупные виды, такие как O. удлинённый имеют собственный продолговатую форму и могут быть достоверно определены на гораздо больших расстояниях, по сравнению с малыми и загадочные видов, таких как морской окунь Squarespot (Sebastes hopkinsi). Эти различные максимальный диапазоны обнаруживаемости изменить эффективная площадь пробы, спускаемый аппарат для каждого вида. Потому что стерео камеры позволяют нам разместить каждую рыбу в трехмерном пространстве с высокой степенью точности, можно определить расстояние от камеры, которые каждая рыба была измерена (т.е., «расстояние Z», названный для «z», которая является перпендикулярно к прямой линии, между камерами). Для каждого вида расстояние, в пределах которого 95% всех людей наблюдались (далее «расстояние 95% Z») считался радиус обследования области и была использована для расчета общей площади обследованных. В дополнение к поставляемому характеристики будет затронуто идентифицируемости экологических условий, таких как мутность воды. Поскольку эти факторы могут меняться во времени и пространстве, важно использовать 95% Z статистика только в совокупности. Хотя он будет весьма точным для крупных выборок, любой один индивидуальный опрос может варьироваться в районе опрошенных.
Протокол, ниже приведены рекомендации по для создания и использования этих показателей. Хотя основное внимание было охарактеризовать глубоководных Роки Хабитат вдоль побережья Тихого океана, по методике, описанной для модифицированных MaxN количество легко применимы к любой вращающейся системе падение камеры. Число вращений камеры, необходимых для характеристики популяций рыб будет зависеть от динамики местных экосистем, но концептуализации модифицированных MaxN останется прежним. Аналогичным образом в то время как мы использовали 3D фотограмметрическое программное обеспечение для анализа стерео видео, методы, описанные здесь легко применяются платформ программного обеспечения, до тех пор, как точное местоположение рыбы в трехмерном пространстве возможно. Кроме того подход применения значение 95% Z расстояния может рассматриваться в будущих исследований с стерео камерами для учета для вегетационных диапазонов обнаруживаемости и более точно рассчитать изобилие рыбы.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
Примечание: Скриншоты программного обеспечения шаги включены как Дополнительные файлы. Пожалуйста, обратите внимание, что описанные ниже шаги программного обеспечения являются специфическими для выбранной программы (см. Таблицу материалов). Общий подход может распространяться на любой платформе стерео программного обеспечения.
1. Подготовьте стерео камерой кадры для анализа
Примечание: Рекомендуется калибровка с помощью калибровки куб. Калибровка куб — трехмерные алюминиевая рама с точно позиционируется отражающей точки на поверхности. При использовании в сочетании с программное обеспечение для калибровки, калибровка куб приводит к большей точности и точности чем клетчатый подходы9.
- Калибровка камеры шлюпку с стерео калибровки программное обеспечение (рис. 1 и рис. 2; см. Таблицу материалов для программного обеспечения рекомендации).
Примечание: Калибровка могут быть проверены перед использованием в области измерения показателей известных размеров на различных расстояниях (см. дополнительный видео 1). Средняя погрешность измерения для цели 50-см на расстоянии 3 м (или меньше) должна быть в пределах 2% от длины известной цели. Также, обратите внимание, что данная калибровочная только будет действительным, если позиции камеры не изменяются относительно друг друга. Важно, чтобы заботиться и избежать непреднамеренного толкаясь камер до тех пор, пока все выборки была выполнена. - Сбор данных поля с помощью калиброванного Ландер (рис. 1, дополнительное видео 2).
- После завершения исследования, создайте новую папку проекта, содержащий файлы видео и калибровки.
Примечание: Папка есть в каждом проекте необходимо минимум пять файлов: слева и справа». Кулачок» калибровка, левой и правой видео файлы (. MP4 или. Формат AVI только) и в список видов (формат .txt). - В программном обеспечении стереоскопических измерений начать новый проект измерения и загрузить соответствующие файлы видео и калибровки.
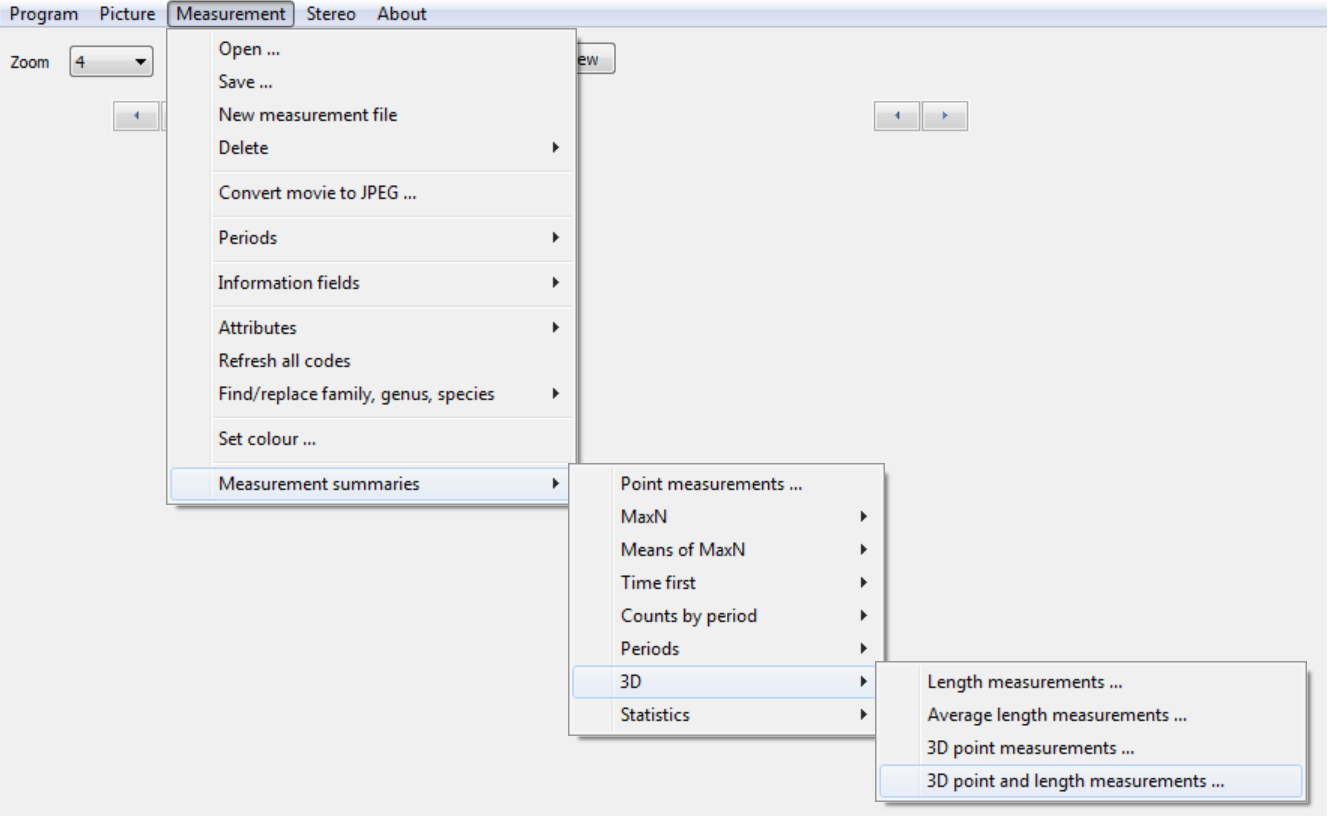
Примечание: Скриншоты всех шагов программного обеспечения доступны среди Дополнительных файлов.- Перейдите к «Измерения» > «Новое измерение файл».
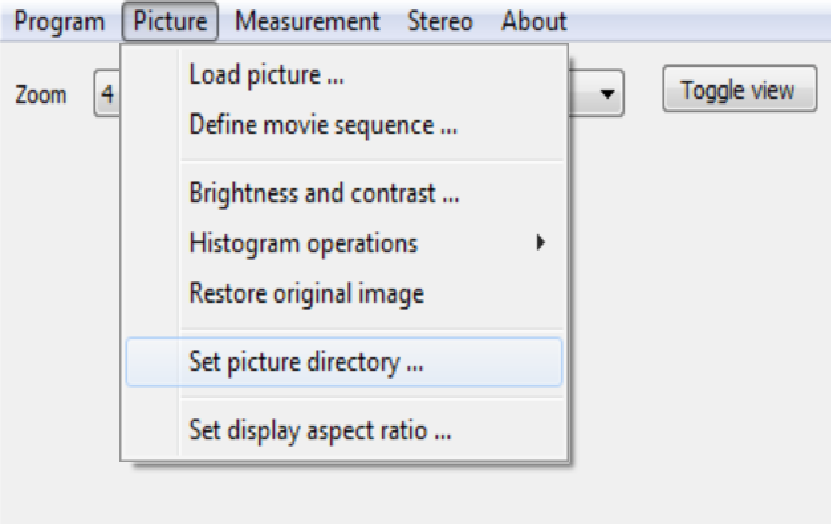
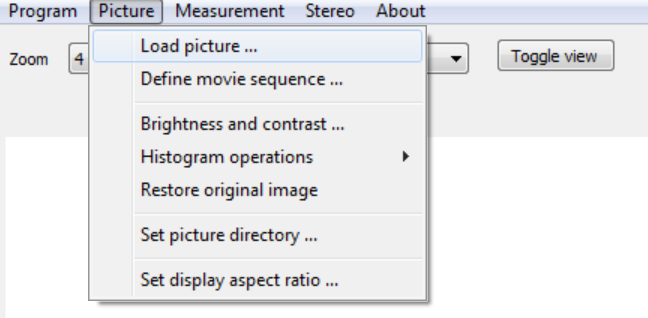
- Задать каталог изображения путем перехода к «Картинка» > «Set картина каталог» и выберите папку, содержащую все файлы проекта.
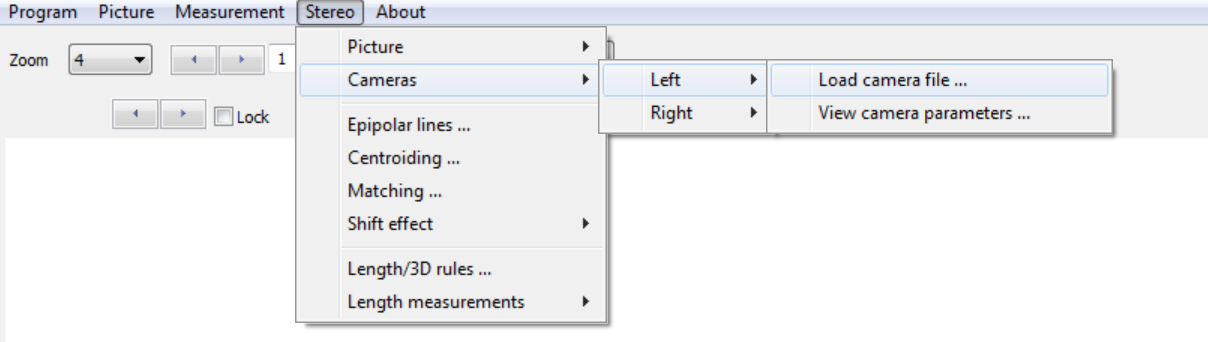
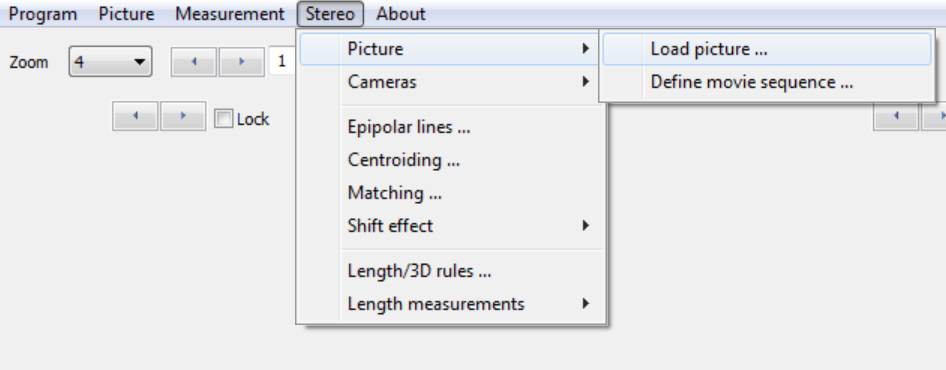
- Загрузить левой камеры». Кулачок» файла путем перехода к «Стерео» > «Камеры» > «Слева» > «Загрузить камеры файл» и выберите соответствующий файл.
- Повторите шаг 1.4.3 для загрузки правую камеру». Кулачок» файл
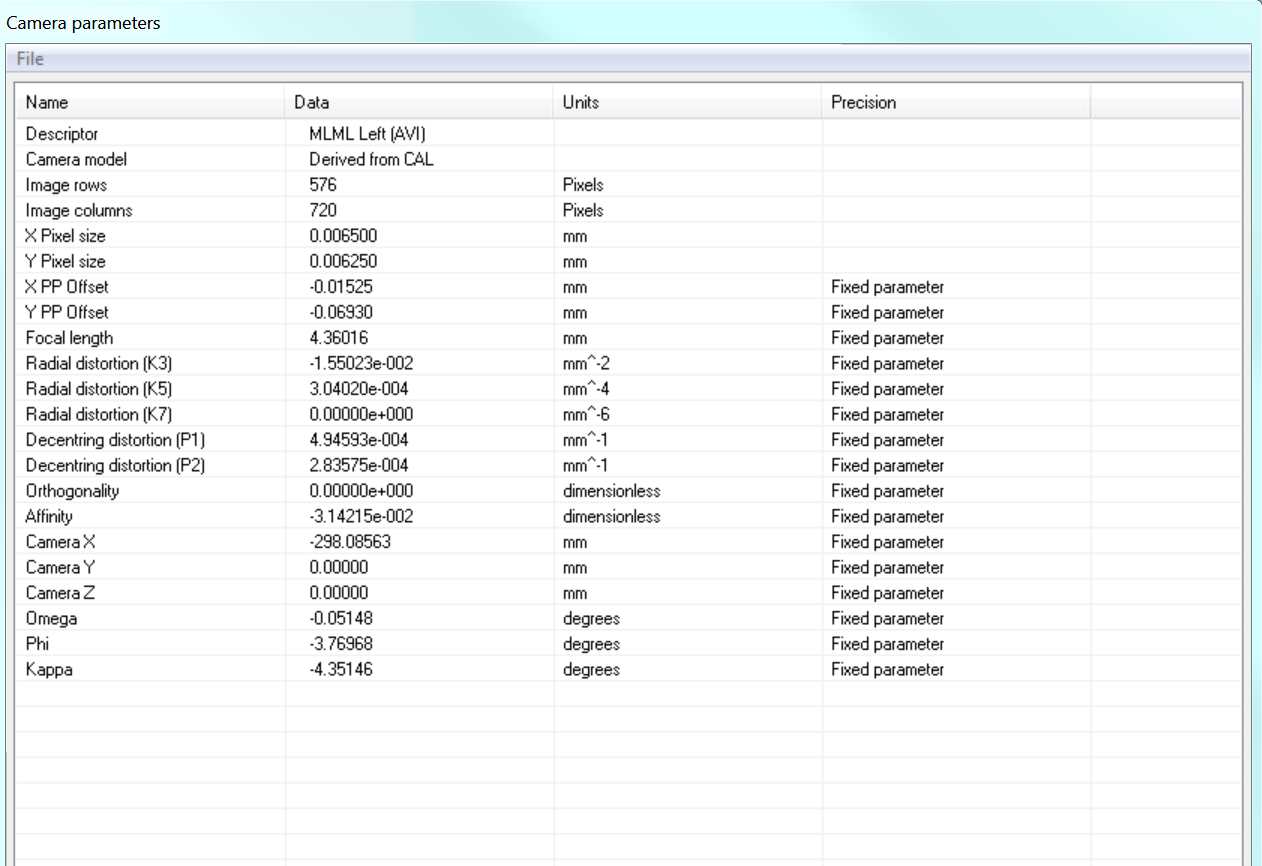
Примечание: Эти файлы содержат калибровки измерений для каждой камеры (например, размер пикселя, пропорции, радиальные искажения, decentring искажение и т.д.) и будет использоваться для измерения рыбы и вычислить расстояние от камеры (например, Z Расстояние). - Определить последовательность фильма для левой видео файла путем перехода к «Картинка» > «определить последовательность фильма» и выбрать видео файл в левой камеры.
- Загрузить левой видео файл в программное обеспечение, выбрав «Картинка» > «нагрузки картинка».
Примечание: Убедитесь, что флажок «Блокировка» снят перед загрузкой видео файлов. Это позволяет как видео, чтобы быть загружены одновременно. - Определить последовательность и нагрузки видео файл фильма для правой видео, используя меню «Стерео» > «картинка» > «определить последовательность фильма» и «Стерео» > «картинка» > «нагрузки картинка».
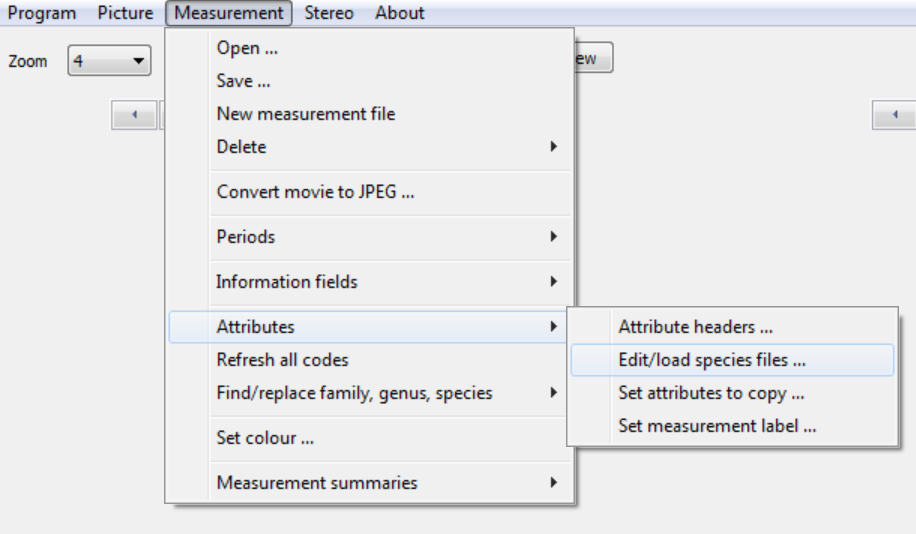
- Загрузить список видов путем перехода к «Измерения» > «Атрибуты» > «Edit/загрузить файл видов».
- Введите ID информации обследование под «Информационные поля» > «Изменить значение поля» и сохранить файл, чтобы создать. EMObs проекта.
- Синхронизация видео, вспышка, аплодисменты, штамп времени (UTC), или любое время конкретные события, которое происходит в обоих видео.
- Если используется отметка времени UTC, рамка шаг вперед в левой видео до тех пор, пока отметка времени начинается новый второй. Происходит еще кадр вперед до вспышка или аплодисменты.
- Рама шаг правой видео вперед до тех пор, пока отметка времени точно соответствует левой видео. Еще кадр шаг вперед до тех пор, пока точный момент вспышка или аплодисменты левой видео матча.
Примечание: Важно, что видео синхронизации в тот же кадр. Видео синхронизации должны быть проверены периодически использовать штамп времени видео, чтобы избежать дрейф кадра камеры во время анализа. Снимали ручной хлопать также могут использоваться в начале и в конце видео для тестирования это право и левой видео были синхронизированы с той же раме.
- Нажмите кнопку «Блокировка» для обеспечения видео играть вместе и поддерживать синхронизацию.
2. создать точку графов и вычислить MaxN
Примечание: Каждая рыба изначально отмеченные 2D точки самые низкие возможные таксономических резолюции. Рыба с неопределенным ID должны быть помечены для последующего просмотра.
- Ждать, чтобы начать подсчет рыбы до конца полного камеры ротации для обеспечения использования польностью 360 градусов. Также ждать, пока расчистил отложений (обычно < 1-2 мин после контакта с дном).
- Как только спускаемый аппарат начинает свое первое вращение, щелкните правой кнопкой мыши определить новый период выборки: «Период определения» > «Добавить новое начало периода». Введите название первого периода как «01» и нажмите «OK».
- Как спускаемый аппарат вращается, начинают маркировки каждой рыбы, которая приходит в рамку с 2D точки с использованием только левой камеры.
- Чтобы добавить точку 2D, щелкните правой кнопкой мыши, выберите «Добавить точку» и выбрать правильное название. Этикетка на минимально возможных таксономическом уровне, выбрав «spp.» для неизвестных видов и нажмите кнопку «ОК».
- Продолжать отмечать каждый новый рыбы соответствии Шаг 2.2.1 до завершения вращения.
- Повторите для каждого дополнительного Lander вращения - обеспечение того, что новый период определяется в начале каждого вращения камеры протокол процедуры 2.1-2.2.
Примечание: Кривые накопления видов были использованы для определения, что восемь ротации были, в среднем, достаточно, чтобы характеризовать изобилие рыбы в настоящем исследовании. Исследователи следует рассмотреть возможность проведения предварительных испытаний с дополнительной камеры вращ, над больше раз замочить, чтобы характеризовать оптимальное количество вращений камеры в рамках конкретной экосистемы. - Расчета вегетационных количество лиц наблюдается на вращение камеры.
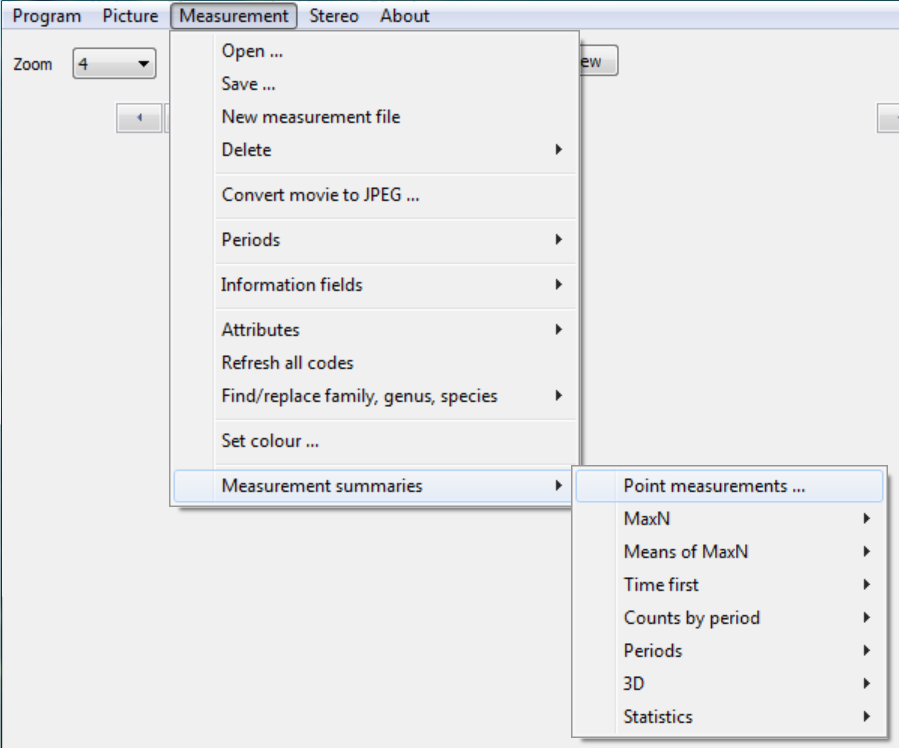
- После перечисления всех вращений экспортировать 2D точки путем перехода к «Измерения» > «Измерение резюме» > «Точку измерения» и сохранить как файл a.txt 2D точки.
- Откройте файл сохраненного 2D.txt точки как электронную таблицу и создать сводную таблицу видов против вращения номер обобщить графов (Таблица 1) путем перехода к «Insert» > «Сводной таблицы». Выберите «Род и вид» для «Метки строки» и «Период» для «Столбца».
- Выберите MaxN для каждого вида, выбрав вращение камеры, которая имеет наибольшее количество людей этого вида (Таблица 1).
- Для рыб, определены только к роду выберите MaxN род уровне, на основе ротации, что наибольшее количество лиц, определенных видов в этом особый род.
Примечание: Этот шаг помогает избежать двойного учета отдельных рыб, которые Идентифицируемы только на более высоких таксономических групп (например, только для рода или семьи). Например, в таблице 1' вращение 1' содержится 10 неопознанных Sebastes spp. и 33 членов рода Sebastes определенных видов, тогда как ' вращение 3' содержатся только два неопознанных Sebastes spp. и 43 членов род морские окуни определенных видов. Поэтому ' вращение 3' будет использоваться для MaxN количество неизвестных Sebastes spp. Таким образом, делается консервативной предположение, что 8 из неопознанных Sebastes spp. в ' вращение 1' были определены в ' вращения 8'. - Если несколько вращений у же количество MaxN для данного вида, выберите первое вращение с MaxN для трехмерной точки измерений.
- Для каждого вида принимать 3D измерения рыбы в ротации, которая произошла MaxN.
- Используйте сохраненные 2D баллы в шагах 2.1-2.3 для перехода к точным же рыбы для 3D-измерения.
- Увеличьте по меньшей мере 4 X лучше определить кончик мордой рыбы и края хвостового плавников (рис. 3).
Примечание: Это может быть необходимо для кадра шаг вперед или назад, чтобы найти лучшие ориентацию рыбы для 3D-измерения. «Лучшие» ориентация является одним где мордой и края хвостового плавников видны в обеих камерах. - Вручную на кончике морда, затем краю хвоста в левой камеры, нажмите кнопку Повторить выбор в том же порядке в правильном видео.
- Выберите идентификации правильных видов из выпадающих меню, как это было сделано в 2.2.1.
- Если 3D-Длина измерения невозможен, для экземпляра если голова и хвост рыбы не видны в обеих камер, затем Марк трехмерной точки вместо кликнув левой кнопкой мыши ту же позицию рыбы в левой и правой видео. Заполните информационные поля как раньше и оставить комментарий «Исключить из измерения длины».
Примечание: MaxN может возникнуть на различных ротациях камеры для различных видов; Однако для любого данного вида измерений должно произойти в одно вращение только (Таблица 1).
- После завершения 3D измерения для всех рыб, экспорт данных as.txt файл для дальнейшего анализа.
- Перейдите к «Измерения» > «Измерение резюме» > «3D точки и длины измерений» и save.txt файла для экспорта.
3. 95% Z расстояние процедура для вегетационных обследуемые районы
Примечание: Расстояние 95% Z представляет собой оценку среднее расстояние, которое вид надежно могут быть определены в рамках данного исследования исключая случаи исключительных условий воды ясности или освещение. Этот расчет учитывает средний океанографических условий для проведения данного исследования и будет нужно быть пересчитаны для каждого нового исследования.
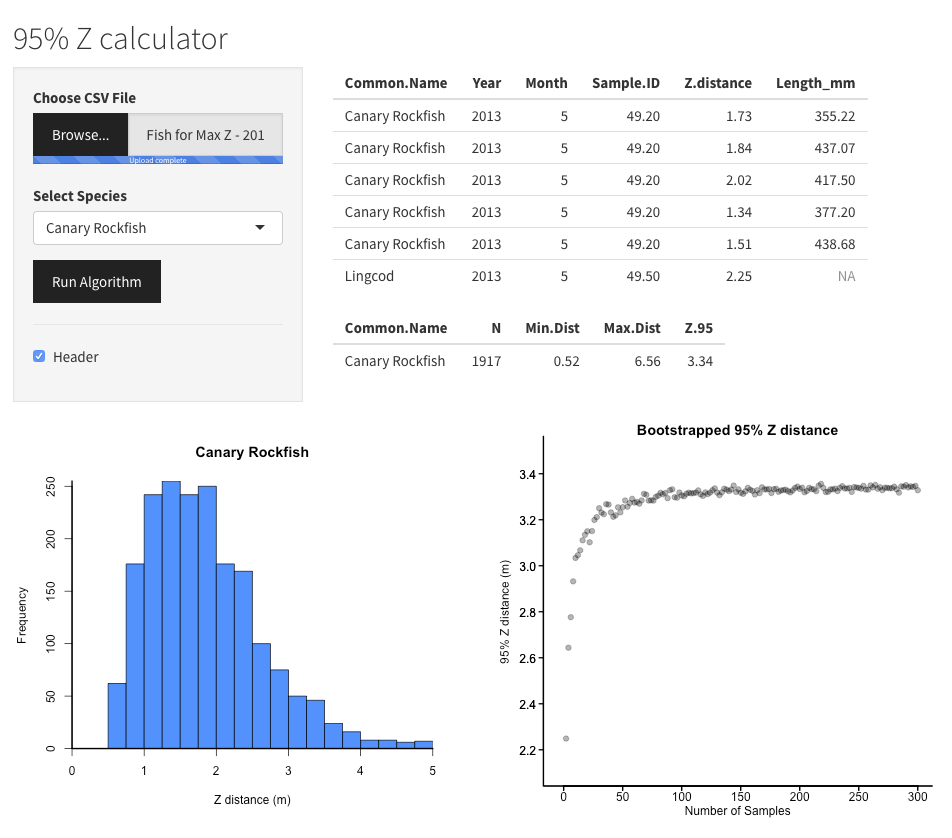
- Используйте простой начальной загрузки, чтобы определить, если размер выборки достаточно велик для того характеризовать расстояние надежного обнаружения для каждого вида.
- Для каждого класса размер выборки (например, бункеры размер выборки 5 рыб), 1000 случайных обращает размера выбранного образца с заменой образца населения и рассчитать означает, что 95% квантиль расстояний этих 1000 рисует и сюжет результирующей Асимптотическая кривая. Увидеть предоставленный код в дополнительных файлов 1 & 2.
- Убедитесь, что достаточное образцы были получены путем сравнения реальный объем выборки с 95% Z расстояние асимптоты с увеличением размера выборки.
- Вычислить значение 95% Z расстояния как 95% квантиль расстояние от камеры измеряется для видов во всех обследований.
- Рассчитайте эффективную площадь обследованных для каждого вида, с использованием 95% Z значения.
Примечание: В случае ротации Lander, значение 95% Z представляет внешний радиус прокос обследованных с внутреннего радиуса определяется физической установки инструмента и как близко к основанию камер возможность наблюдать. Формируется как спускаемый аппарат вращается, Площадь съемки «пончик» формы (рис. 4).- Вычислите площадь опрошенных как:

Примечание: например, сравнительно крупных видов, как морской окунь Yelloweye (Sebastes ruberrimus) был на расстоянии 95% Z 3,3 м и площадью эффективной обследования 30.9 m2 на шлюпке развертывания: 34.3 m2 (внешний круг) - 3,4 м2 (внутренняя круг) = 30.9 m2 (общее обследование района).
- Вычислите площадь опрошенных как:
- С помощью области вычисляемых опрошенных (шаг 3.3.1), преобразование отдельных видов счетчиков (MaxN) в оценки плотности для каждого визуального обследования с помощью уравнения:

Примечание: Аналогичная процедура могла бы использоваться для расчета объемной плотности, вместо того, чтобы ареальная плотность; Однако этот процесс не описано здесь.



Таблица 1: Сводная таблица примера MaxN. Выбор MaxN для каждого вида продемонстрировал с красным и полужирным текстом. Обратите внимание, что консервативной MaxN для неопознанных Sebastes spp. определяется вращение с наиболее Sebastes определенных видов (вращение 3). Кроме того хотя это исследование используется восемь вращений камеры, только четыре вращений отображаются в таблице 1 для простоты. Процесс отбора MaxN идентичны независимо от числа оборотов.

Рисунок 1: стерео видео Ландер. Основные аппаратные номерные (1) 300 м пуповины, (2) два цифровых видеомагнитофонов (DVR) с съемных карт памяти 32 ГБ водонепроницаемый бутылку, (3) два светодиод выводить 3000 люменов на цветовую температуру 5000 K и (4). две камеры с 620 ТВ линии (ТВЛ) резолюции. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.

Рисунок 2: Калибровка куб (500 x 500 x 300 мм). Пример калибровки с «калибровка куб» показано в двух разных направлениях: (A) в правой части куба выталкивается на камеры, и (B) лицо куб параллельно в лице камер. Красные точки обозначают контрольные точки, используемые в этом методе конкретного калибровки и всегда должны быть определены в пронумерованных порядке. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.

Рисунок 3: 3D измерения размещены на морские окуни miniatus. В каждом кадре для стерео измерений были определены кончика рыла и конце хвоста. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.

Рисунок 4: область, опрошенных в средстве Lander. Эффективная площадь, опрошенных в средстве Ландер был ограничен минимальное расстояние Z и 95% Z расстояние для каждого вида. Обратите внимание, что этой области создан «пончик» формы опроса тома вокруг Ландер. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Период 2013 и 2014 мы провели 816 обследований с вращающейся стерео видео Ландер (рис. 1) вдоль центрального побережья Калифорнии и собранные MaxN и 95% Z расстояние (рис. 4) данные по более чем 20 видов. Там были умелой в эффективному обнаружению диапазоне видов наблюдается, вероятно из-за взаимодействия видов размер, форму, и окраска (рис. 5). Например флаг Rockfish (Sebastes rubrivinctus) имеет собственный диапазонов на ее сторонах, позволяющие уверенно идентификации на больших расстояниях, чем другие виды сопоставимого размера. Аналогично Канарские Rockfish (Sebastes pinniger) относительно большие здоровые, но есть пигментация, которая похожа на другие виды, таким образом делая его более трудно определить на расстоянии (рис. 5).
Мы используем два вида продемонстрировать расчеты MaxN и 95% Z расстояние значения: Пигмейский морской окунь (Sebastes wilsoni) и Lingcod (O. удлинённый). Первый является небольшой здоровых рыб, которые может быть сложно определить на расстоянии; тогда как O. удлинённый является относительно большим, имеет различные формы и более легко идентифицировать. С 2013-2014 1191 измерений для S. wilsoni и 1222 измерений для O. удлинённый были собраны. Затем, 95% квантилей расстояний, на которые эти виды были замечены: 95% Z расстояния были 2.65 m были рассчитаны S. wilsoni и 3.96 m для O. удлинённый (рис. 5). Эти расстояния 95% Z перевести на эффективное обследование районов 18.6 m2 и 46.0 m2 для S. wilsoni и O. удлинённый, соответственно. Простой загрузчик анализ подтвердил, что достаточно образца, размеры были получены для характеризации 95% Z значения расстояния. Для обоих видов оценки расстояния 95% Z, стабилизированный когда больше чем 50 обследований, содержащих эти виды были взяты пробы, предоставляя убедительные доказательства того, что выбранный выборки были более чем достаточно для характеристики эффективного Lander образца для этих виды (рис. 6).
MaxN сиг / обследования затем были преобразованы в плотности (количество рыбы/м2). Мы использовали оценки плотности от 816 обследований для проверки гипотезы, что Lingcod и Пигмейский морской окунь будет отмечаться главным образом на горельеф обитания. Для обоих видов, были значительно большей плотностью более высокого и среднего помощи, по сравнению с низким помощи обитания (Крускала-Уоллиса, p <<. 001; Рисунок 7). Эти результаты согласуются с ассоциациями сообщалось ранее Хабитат для обоих видов15. Не наблюдалось разницы между средними и горельеф обитания для обоих видов.
Чтобы понять, как вращающийся Lander по сравнению с традиционными стационарных камер систем, мы оценивали различий в плотности и изменчивости оценок между вращающейся и имитируемых стационарных Ландер. Мы предполагали, что типичный стационарных Lander одной камеры будет иметь 90 градусов поля зрения. Вращающийся Lander имеет 60 градусов поля зрения и требует 5 секунд поворота на 90 градусов. С помощью 261 обследований, мы выбрали данных наблюдения рыбы из среднего 5 секунд Lander замен установить MaxN. Плотность смета для псевдо-стационарных, Lander были стандартизированы с помощью сокращения области охвата (то есть, примерно ¼ области вращающегося Ландер). Различия в средней плотности и коэффициента вариации между вращающимися и псевдо-стационарные Ландерс были оценены с Уэлча t теста. Значит, плотности, полученные путем вращения камеры были 18% больше, чем те, которые получены с стационарных камер (Уэлча t21.7, p = 0.081, Рисунок 8A). Кроме того, коэффициент вариации было 1,8 раза больше с стационарных камер по сравнению с вращение камеры (Уэлча t15.1, p < 0,001, рис. 8).

Рисунок 5 : Z расстояния наблюдается для выбора видов. Вертикальные красные полоски обозначают минимальное расстояние Z (0,81 м от камер) слева и значение Z расстояние 95% справа. Обратите внимание, что это представляет среднее эффективное обследование в окрестностях шлюпку для каждого вида. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.

Рисунок 6 : Загружен расстояние значения Z. Начальная загрузка увеличить размер выборки для наблюдений O. удлинённый S. wilsoni (A) и (B). Размеры выборки, начиная от 3-300 были загружен 1000 раз каждый, чтобы вычислить среднее расстояние 95% Z и убедитесь, что размер выборки были адекватными. Обратите внимание, что значения по оси y в диапазоне от 2,0-2,6 м для S. wilsoni и 2,6-4.0 м для O. удлинённый. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.

Рисунок 7 : Хабитат различия двух видов, выберите. Средняя плотность (± SE) S. wilsoni (A) и (B) O. удлинённый измеряется на низкий, средний и горельеф рок Хабитат. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.

Рисунок 8 : Различия между вращающимися и псевдо-стационарные Ландерс. Обе оценки (A) означает, что плотность (рыб/m2 ± SE) и (B) средний коэффициент вариации (кв) ± SE для 261 обзоров представлены. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.

Дополнительные видео 1: Проверка калибровки. Калибровка могут быть проверены перед использованием в области измерения показателей известных размеров на различных расстояниях. Пожалуйста нажмите здесь, чтобы посмотреть это видео. (Правой кнопкой мыши для загрузки.)

Дополнительные видео 2: Подводное обследование кадры. Пожалуйста нажмите здесь, чтобы посмотреть это видео. (Правой кнопкой мыши для загрузки.)
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Традиционные MaxN метрики основывается на идею подсчета гарантированное минимальное количество лица во время обследования. Если определенное количество рыбы одновременно видны в одном кадре видео, не может быть любой меньше настоящее, но потому, что рыбы, мобильных и гетерогенно распределенной, вероятность видя всех лиц одновременно в течение одного кадра видео Низкая . Поэтому вполне вероятно, что традиционные MaxN недооценивает истинное рыба изобилии16,17. Кроме того было продемонстрировано, что традиционные MaxN может отображать нелинейной отрицательно предвзятым отношения с растущей рыбы обилия16,18. Это может быть связано с явлением передач насыщения, whereby относительное изобилие индексов не обнаружить что истина увеличивается в изобилии19,20. И наоборот очевидной стабильность индекс с действительно снижается изобилие рыбы был назван «hyperstability» и в конечном итоге может привести к краху рыбных популяций21,22. Недавнее исследование сообщили, что нестабильность в MaxN может быть частично решены путем увеличения обследованных поле зрения16. В этом исследовании отношения между MaxN и истинного изобилия стали все более линейной, как поле зрения подошли к 100% (т.е., 360 градусов).
Результаты от стационарных камер моделирования указывают на соответствие этих предыдущие результаты и предположить, что значение MaxN может лучше характеризуют изобилие рыбы. Например предполагаемое среднее коэффициент дисперсии был сокращен среди полученные от вращающегося Lander, по сравнению с псевдо-стационарные Lander оценки плотности. Это, вероятно, объясняется тем, что рыбы гетерогенно распространяются, и, скорее всего, «Мисс» настоящий рыбы, если Lander сталкивается неправильном направлении стационарных камер. Вращающейся Ландерс максимизировать усилия выборки землемерных полный 360 градусов вокруг инструмент, и чистый эффект является снижение стоимости выборки и дисперсии и общее увеличение Статистическая мощность исследования. Будущие исследования лучше решить этот вопрос, непосредственно тестирование вращающейся шлюпку с отдельной стационарных Lander в паре обследования. Аналогичным образом мы смогли непосредственно проверить связь между MaxN и истинного изобилия в этом исследовании, и будущие исследования может непосредственно проверить это с помощью либо моделирования или контролируемых средах, как это было сделано в Кэмпбелл (2015)16.
Возможная критика измененного подхода MaxN является возможность двойной подсчет лиц. Потому что Lander сделал один полный оборот в минуту, и бентических видов интерес в экосистеме, как правило, относительно оседлыми и медленно движущихся в большинстве условий, мы считаем, что риск двойного подсчета была низкой. Кроме того наблюдались случаи, когда рыба будет ввести или покинуть район обследования в течение восьми вращений. Были приняты дополнительные меры предосторожности, чтобы избежать двойной подсчет как с помощью вращения с наибольшее число лиц данного рода рассчитывать неизвестных видов. Другие метрики были предложены в качестве индексов изобилие рыбы как означает количество; Однако они тоже были показали последовательно недооценивать истинного изобилия, хотя повышение изменчивости среди плотность оценкам16. MaxN, поэтому рекомендуется как более точного метрики изобилия рыбы. Хотя наши модифицированных MaxN метрики не гарантирует консервативную оценку абсолютное минимальное количество лиц, мы в целом уверены в том, что этот модифицированный подход MaxN обеспечивает более точные оценки истинной рыба изобилии, и что чрезмерно подсчета рыба относительно низкий интерес.
Многие стороны Просмотр видео трансектных обследований использования фиксированной ширины для оценки плотности для всех видов разрез. Аналогичным образом один из подходов к использованию стерео видео Ландерс бы использовать один максимальное расстояние от камеры для расчета обоих площади обследованных и рыбы плотности. Оба могут привести к занижен видов, которые надежно идентифицированы только для небольших расстояний чем фиксированной трансектных ширина оценки23. Расстояние, какой вид надежно выявлены обусловлена взаимодействием таких факторов, как размер, форма, шаблон окраской, поведение рыб, а также экологические факторы. Метод distance 95% Z является особенно выгодным в том, что она составляет для взаимодействия всех этих факторов одновременно. К примеру O. удлинённый был видов, которые мы в состоянии определить наибольшее расстояние, вероятно в результате его собственный, большой, удлиненные фигуры и поведенческая тенденция возлагать на морском дне. Розовый морской окунь (Sebastes rosaceus) был одним из кратчайшего расстояния Z, вероятно, потому, что, будучи членом подрода Sebastomus , он имеет несколько родственных соединений, которые очень похожи и трудно отличить на увеличение расстояния. Позволяя для вегетационных областей, рассмотренных Lander, мы сможем более точно оценить обилие рыбы. Загрузчик подход к верификации размер образца простой и легко реализована в других обследований, и мы считаем, метод 95% Z расстояния могут быть далее адаптированы для размещения линии трансектных обследования. 95% Z расстояние будет затем представлять горизонтальное расстояние надежного обнаружения для видов с погружной или дистанционно управляемые транспортного средства (ROV) Инструменты. В будущем исследователи могут расследовать с помощью теории выборки расстояние модель плотности как функция обнаруживаемости с расстояния23,24.
Поскольку существует более широкое использование без принять резервов в рыболовства управления25,26,27, существует растущая потребность в недобывающих выборки методов, особенно в глубоководные местообитания недоступны для дайвера обследований. Однако это также необходимо, чтобы эти методы точных и надежных данных о составе длина, изобилия и видов рыбы. Видео Ландерс являются относительно новый инструмент мониторинга, имеют низкую стоимость, может эксплуатироваться на относительно небольших судах возможностей и технически проще работать, чем Дуа и подводные требуя меньше и менее квалифицированного персонала. Хотя не обсуждаются в этих методах, Ландерс стерео камеры способны точная длина измерения с погрешностью менее 2%. Кроме того Ландерс могут быть оперативно развернуты более крупных географических районах, повышение статистического вывода. Мы ожидаем, интерес к видео мониторинга инструменты для повышения качестве исследовательских учреждений смотреть затянуть бюджетов и более эффективно распространять выборки усилий. Наши модификации MaxN и 95% Z расстояние должно рассматриваться в будущем экологические исследования с использованием вращающихся видео Ландерс.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Авторы не имеют ничего сообщать
Acknowledgments
Эта работа финансировалась природы и частных доноров, фонд Фонд Наследие ресурсов, Гордон и Бетти Мур фонд, Фонд защиты окружающей среды, Калифорния море Грант программы, НСМР национальной программы совместных исследований и NOAA Грант Салтонстол Кеннеди #13-SWR-008. Морских прикладных исследований и разведки (Дирк Розен, Рик Ботман, Энди Lauerman и Дэвид Jefferies) разработали, построена и поддерживается инструмент видео Lander. Мы благодарим Джим Seager и SeaGIS™ программного обеспечения для получения технической поддержки. Капитан и коммерческих Рыбак Tim Maricich и членов экипажа на борту F/V Donna Кэтлин предоставляет поддержку в развертывании посадочный модуль с 2012-2015 годы. Спасибо всем, кто участвовал в видео сбора или анализа (Anne Tagini, Donna Kline, лейтенант Amber Пейн, Bryon Дауни, Marisa Ponte, Ребекка Миллер, Мэтт Меррифилд, Уолтер пьянящий, Стив Rienecke, Дик EJ и Джон поле).
Materials
| Name | Company | Catalog Number | Comments |
| calibration cube | SeaGIS | http://www.seagis.com.au/hardware.html | 1000x1000x500 mm is the preferred dimensions. Other methods of calibration are available. |
| CAL calibration software | SeaGIS | http://www.seagis.com.au/bundle.html | |
| EventMeasure stereo measurement software | SeaGIS | http://www.seagis.com.au/event.html | |
| Statistical software | R Core Team 2017 (v. 3.4.0) | Bootstrapping code can be found: https://github.com/rfields2017/JoVE-Bootstrap-Function | |
| Spreadsheet Software | Microsoft Excel | ||
| 2 waterproof cameras | Deep Sea Power and Light | HD quality preferred | |
| 2 depth rated, waterproof lights | Deep Sea Power and Light : 3000 lumen LED with 5000k color temperature | ||
| DVR recorder | Stack LTD DVR | ||
| standard PC | Windows 10 preferred OS | ||
| rotating Lander platform | Marine Applied Research and Engineering (MARE) |
References
- Love, M. S., Yoklavich, M. M., Thorsteinson, L. K. The Rockfishes of the Northeast Pacific. , University of California Press. Berkley. (2002).
- Laidig, T. E., Watters, D. L., Yoklavich, M. M. Demersal fish and habitat associations from visual surveys on the central California shelf. Estuar. Coast. Shelf Sci. 83 (4), 629-637 (2009).
- Anderson, T. J., Yoklavich, M. M. Multiscale habitat associations of deepwater demersal fishes off central California. Fish. Bull. 105 (2), 168-179 (2007).
- Yoklavich, M. M., Cailliet, G. M., Sullivan, D. E., Lea, R. N., Love, M. S. Habitat associations deep-water rockfishes a submarine canyon an example of a natural refuge. Fish. Bull. 98 (3), 625-641 (2000).
- Status of the Pacific Coast Groundfish Fishery, Stock Assessment and Fishery Evaluation. , Pacific Fishery Management Council. Portland, OR. (2016).
- Cappo, M., Harvey, E., Malcolm, H., Speare, P. Potential of video techniques to monitor diversity, abundance and size of fish in studies of marine protected areas. Aquatic protected areas- What works best and how do we know. Beumer, J. P., Grant, A., Smith, D. C. , Proc. World Congr. on Aquat Protected Areas. Australian Soc. for Fish Bio. North Beach, Western Australia. 455-464 (2003).
- McLean, D. L., Green, M., Harvey, E. S., Williams, A., Daley, R., Graham, K. J. Comparison of baited longlines and baited underwater cameras for assessing the composition of continental slope deepwater fish assemblages off southeast Australia. Deep-Sea Research Part I: Oceanographic Research Papers. 98, 10-20 (2015).
- Parker, D., Winker, H., et al. Insights from baited video sampling of temperate reef fishes: How biased are angling surveys. Fish. Res. 179, 191-201 (2016).
- Boutros, N., Shortis, M. R., Harvey, E. S. A comparison of calibration methods and system configurations of underwater stereo-video systems for applications in marine ecology. Limnol. Oceanogr. Methodss. 13 (5), 224-236 (2015).
- Harvey, E. S., Cappo, M., Butler, J. J., Hall, N., Kendrick, G. A. Bait attraction affects the performance of remote underwater video stations in assessment of demersal fish community structure. Mar. Ecol. Prog. Ser. 350, 245-254 (2007).
- Watson, J. L., Huntington, B. E. Assessing the performance of a cost-effective video lander for estimating relative abundance and diversity of nearshore fish assemblages. J. Exp. Mar. Bio. Ecol. 483, 104-111 (2016).
- Easton, R. R., Heppell, S. S., Hannah, R. W. Quantification of Habitat and Community Relationships among Nearshore Temperate Fishes Through Analysis of Drop Camera Video. Mar. Coast. Fish. 7 (1), 87-102 (2015).
- Hannah, R. W., Blume, M. T. O. Tests of an experimental unbaited video lander as a marine fish survey tool for high-relief deepwater rocky reefs. J. Exp. Mar. Bio. Ecol. 430, 1-9 (2012).
- Starr, R. M., Gleason, M. G., et al. Targeting Abundant Fish Stocks while Avoiding Overfished Species: Video and Fishing Surveys to Inform Management after Long-Term Fishery Closures. Plos One. 11 (12), 0168645 (2016).
- Love, M. S. Certainly more than you want to know about the fishes of the Pacific Coast: a postmodern experience. , Really Big Press. Santa Barbara, CA. (2011).
- Campbell, M. D., Pollack, A. G., Gledhill, C. T., Switzer, T. S., DeVries, D. A. Comparison of relative abundance indices calculated from two methods of generating video count data. Fish. Res. 170, 125-133 (2015).
- Cappo, M., Speare, P., De'ath, G. Comparison of baited remote underwater video stations (BRUVS) and prawn (shrimp) trawls for assessments of fish biodiversity in inter-reefal areas of the Great Barrier Reef Marine Park. J. Exp. Mar. Bio. Ecol. 302 (2), 123-152 (2004).
- Schobernd, Z. H., Bacheler, N. M., Conn, P. B., Trenkel, V. Examining the utility of alternative video monitoring metrics for indexing reef fish abundance. Can. Jour. Fish. Aquat. Sci. 71 (3), 464-471 (2014).
- Hansen, M. J., Schorfhaar, R. G., Selgeby, J. H. Gill-Net Saturation by Lake Trout in Michigan Waters of Lake Superior. North Am. J. Fish. Manag. 18 (4), 847-853 (1998).
- Dauk, P. C., Schwarz, C. J. Catch estimation in the presence of declining catch rate due to gear saturation. Biometrics. 57 (1), 287-293 (2001).
- Hilborn, R., Walters, C. J. Quantitative Fisheries Stock Assessment Choice, Dynamics and uncertainty. , Springer. Dordrecht. (1992).
- Erisman, B. E., Allen, L. G., Claisse, J. T., Pondella, D. J., Miller, E. F., Murray, J. H. The illusion of plenty: hyperstability masks collapses in two recreational fisheries that target fish spawning aggregations. Can. Jour. Fish. Aquat. Sci. 68, 1705-1716 (2011).
- Buckland, S. T., Anderson, D. R., Burnham, K. P., Laake, J. L. Distance Sampling: Estimating abundance of biological populations. , Chapman and Hill. London. (1993).
- Ronconi, R. A., Burger, A. E. Estimating seabird densities from vessel transects: Distance sampling and implications for strip transects. Aquat. Bio. 4 (3), 297-309 (2008).
- Caselle, J. E., Rassweiler, A., Hamilton, S. L., Warner, R. R. Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected areas Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected. Nat. Publ. Gr. , 1-14 (2015).
- Starr, R. M., Wendt, D. E., et al. Variation in Responses of Fishes across Multiple Reserves within a Network of Marine Protected Areas in Temperate Waters. Plos One. 10 (3), 0118502 (2015).
- Lester, S., Halpern, B., et al. Biological effects within no-take marine reserves: a global synthesis. Mar. Ecol. Prog. Ser. 384, 33-46 (2009).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}