

Summary
このプロトコルは、新しい行動テスト(豚のホームペンにおけるヒトアプローチテスト)を記述し、脳震盪性外傷性脳損傷後の実験室ブタの機能的欠陥を検出する。
Abstract
外傷性脳損傷(TBI)の発生率は、民間人と軍事集団の両方で増加しており、多くの研究者がTBIのブタモデルを採用しています。TBI のげっ歯類モデルとは異なり、標準化された動作テストはほとんどありません。大きな動物は、げっ歯類よりも試験領域でより侵襲的な取り扱いを必要とし、動物の反応にストレスとバリエーションを追加する可能性があります。ここで、実験室の豚のホームペンの前で行われるヒトアプローチ試験(HAT)について説明する。それは非侵襲的であるが、それは住宅のセットアップの違いを可能にするのに十分な柔軟性がある。
HAT では、3 つの行動エトグラムが開発され、アプローチ インデックス (AI) を作成するための数式が適用されました。結果は、HAT とそのインデックス AI が、軽度の TBI (mTBI) の後のブタの動作の軽度および一時的な変化を検出するのに十分な敏感であることを示しています。さらに、特定の行動結果はハウジングに依存しますが、AIを使用することで変動を低減し、ラボ全体で一貫した測定を可能にします。このテストは信頼性が高く、有効です。HATは、多くの実験室で、怪我、病気、および苦痛のブタモデルの様々なタイプのために使用することができます。このテストは、観察者が一貫して各サンプルに9分以下を費やすように、最適化された手動タイムスタンプ法のために開発されました。
Introduction
ヒトmTBIは、脳1、2、3内に世界的な構造変化または有意な上脳がないにもかかわらず、機能的欠陥によって定義されることが多い。実際、一部のmTBI患者において、この傷害の特徴的特徴は、神経解剖学的変化4、5の不在における心理状態の変化である。豚の脳はげっ歯類7よりも解剖学的にも生理学的にも人間に近いため、mTBI6のブタモデルを利用し、対応する測定はヒトとの関連する一般的なデータ要素のセットを提供する可能性がある。
近年、ブタモデルは、前臨床研究のための神経外傷科学者とmTBI利害関係者の関心を得ています。しかし、TBIのげっ歯類モデルとは異なり、実験室の豚の感情状態(すなわち、心理状態)7、8、9の評価を可能にする標準化された行動テストがいくつか公開されています。 10.私たちの研究室の長期的な目標は、豚が臨床下の病気を経験しているとき、または動物が病理学的ストレス関連状態にあるときに測定するのに十分な敏感ないくつかの相補的な行動ツールセットを開発することです。
実験室のブタにおける情動状態の変化を測定する繰り返し行動試験は、健康な動物から病理学的状態を有する動物を区別するための良い候補である可能性がある。例えば、インペンHATは、農家が良好な気質で健康な豚を選択したり、苦痛、怪我、および病気を引き起こした管理および住宅戦略を変更するのを助けるために商業豚の生産に使用されました11,12.これらの試験は、1匹のブタまたはブタ13のグループの動機および全体的な感情状態を定量化するために使用された。
私たちの研究室や他の研究者は、3つのカテゴリーの行動を定量化することによって豚の動機を測定しました:1)豚が口、鼻、または顔を使って口、鼻、または顔を嗅ぎ、なめる、噛む、非栄養的な口腔行動(NNOB)を通して発現される探索的状態、基板を根付か、または基板14、15なしで切り刻む。2)オブジェクトまたは16である豚の空間的な関係;3)ブタは単眼17を有するが、近視眼を有し、視力18よりも嗅覚を優先するので、目の接触の代わりに使用される鼻方向。健康な豚が人間をやりがいのある刺激と結びつけると、彼らはNNOBの高周波を発現し、鼻を人間に向け、人間11、16に近づくことを目指す。しかし、病気、怪我、または苦痛な経験の後、楽しい刺激を求める動機が低下し、したがって、これらの測定可能な行動は19を減少させる可能性が高い。豚行動研究者は、アンヘドニア、楽しい刺激を経験する動機の欠如は、自宅の環境内の豚で認識され、測定可能であることを指摘しました 20.したがって、繰り返しのHAT(治療前および治療後)は、副脳震盪mTBIで処理された実験室のブタをシャム処理(麻酔のみ)の被験者と区別するための敏感な手段として役立つ可能性がある。アンヘドニアは、TBI患者が21を経験する可能性のある1つの感情的な状態です。ここで使用されるHATは、動物モデルから臨床作業への行動所見の翻訳を合理化するのに役立つ可能性を秘めています。HATは実験の過程で毎日投与することができ、これはまた、動物の福祉と畜産22を最適化するための実験室の豚のケアを標準化するのに役立つかもしれません。
ここで、HATを用いて、ミニブタにおけるmTBIに起因する挙動の違いを調べた。行動の変動を最小限に抑えるには、HATの非侵襲的な対策を利用し、豚が自宅のペン、日常的な管理、日常的な治療に順応できるようにすることで達成されました。従来、テストアリーナは、動作を測定するために使用されます(例えば、オープンフィールドテスト)。ペン内テストは、スペースが限られているラボで役立ちます。テストアリーナで豚を移動して処理すると、ストレス応答(苦痛またはユーストレス)を引き起こし、テストに対する応答のバリエーションが追加される可能性があります。ペンインテストでは、そのハンドリングコンポーネントが削除されるため、ハンドリング・ストレス17からのばらつきが減少する可能性があります。これらの理由から、このmTBIモデル用の日刊紙ペンHATを開発しました。
動物の感情状態を適切に定義する標準化および定量化された測定は、新しい行動試験を開発する上で重要な側面である。さらに、テストは複数のラボで繰り返し可能である必要があります。ここでは、このプロトコルを開発するために、HATは3つの実験室の異なるハウジングシステムで試験した。サンプルビデオから特定の動作をタイムスタンプするために、3つのサブトグラムが作成されました。次に、3つのエトグラムを組み込み、複数のラボでのHATの使用を可能にする重み付け式を作成しました。この試験は、脳震盪性mTBIで処理されたミニブタのために特別に開発され、使用されたが、ここで開発された方法およびプロトコルは、臨床的に負傷した/病気または苦しんでいる豚と健康な豚。
行動の結果は、単一対グループハウジング、フリースペース手当、使用される床の種類、使用されるフェンスの種類、給餌と水の場所、排便面積、および環境エンリッチメントの場所によって影響を受けます。そこで、3つの住宅タイプを検討しました(図1):住宅タイプAはカンザス州立大学(マンハッタン、KS)でした。住宅タイプBとCはバージニア工科大学(バージニア州アーリントン)にありました。各拠点の個々の施設動物管理利用委員会(IACUC)は、施設と手順の使用を承認しました。
ハウジングタイプA(図1A)のエトグラムを開発するために、ミネソタクロスミニ豚(イノシシ=7、ギルト=1;国立豚研究リソースセンター、コロンビア、MO;年齢= 25.6 ± 3.66 [平均± 標準偏差(SD)] 週は、動物に優しい床(IACUC #3881)を持つ単一のペンで屋内に収容した。このプロトコルに使用された豚は健康であったが、治療法は適用されなかった。ハウジングタイプBのプロトコルを開発するために、ユカタンミニブタ(年齢=25.3±2.80週間[平均±SD]は、バージニア工科大学の施設(IACUC #15-060)で一戸建てでした(図1B)。動物治療は、他の場所29に記載され、ブラスト波過圧またはシャムコントロール(麻酔のみ)を用いた粘膜下mTBIの誘導を含む。ハウジングタイプCのプロトコルを開発するために、5匹のメスゲッティンゲンミニブタ(年齢=23.7 ±1.18週間[平均±SD])は、バージニア工科大学で大型ペンでペアに収容された(図1C;図1C;)IACUC#15-060)。最初の2つの住宅環境は、典型的な実験室のハウジングであるか、単一の家の豚が含まれています。ハウジングタイプCは、2匹以上の豚を収容できる非定型住宅環境であり、標準的な実験室用住宅よりも豊かな環境と考えられる。次の方法に従う場合は、このプロトコルをハウジング タイプ間で使用できます。
Protocol
各場所(カンザス州立大学とバージニア工科大学)の個々のIACUCは、施設や手順の使用を承認しました.
1. カメラとペンの設置とルーチンの確立
- 動物をペンに入れる前に、各ペンの上に90°の角度でカメラを固定してください(推奨カメラシステムの材料表を参照)。
- 研究期間中、またはテストセッション中のみ、30 フレーム/秒 (fps) で動物を連続的に記録します。
- ボウル、水やり、マット、おもちゃをボルトとチェーンで固定します。
- 白またはピンクのノイズ(例えば、滝の音)を連続的に再生するサウンドマシンを豚の施設に置きます。
注:外部の突然の騒音(例えば、ドアの開閉)は、セッション23、24の間に驚くべき反射を引き起こす可能性があります。 - 施設全体でペンで処理をランダム化または階層化します。
-
確立された畜産ルーチンを設定します。これは、人間がペンをきれいにし、餌を与え、それらを処理し、テストを実行することを期待するタイミングを知るのに役立ちます。
- 豚が報酬と人間を関連付けることを可能にするために、おなじみの御馳走を使用してください。
- 報酬中にクリッカーを使用して、ブタがクリック音を報酬に関連付けることができます。ブタを報酬で理解するために発声や視覚信号を使用しないでください(材料の表を参照)。
- 朝の食事の前に、またはアドリボタム飼育豚のための新しいフィードを配置する前にセッションを行います。
2. 豚の同定
- 単一の操作である場合でも、フィードで被写体を識別できるようにします。
- 観察者が治療に盲目のままで、治療に関連しないマーキングシステムでタイムスタンプを行う際に公平に保たるようにしてください。特定の色、円形、およびパターンのダクト テープのストリップに付着している医療グレードのテープ (材料の表を参照) を使用します。
- 1 つの丸いパッチを使用して豚の上部をマークし、各辺に 1 つずつマークします (図1、緑と青のマーカーを参照)。
- テープコーナーにスミアタグセメント(0.35g未満)を貼り付け、寿命を延ばします。
注:タグセメントが多すぎるとすぐに乾燥せず、テープが早期に落ちる原因となります。 - 順応期間中にマーキング戦略をトラブルシューティングおよびカスタマイズして、公式テストを効率的に実行し、豚にストレスを加えることなく行います。
- データ収集シートを使用してマーキングとサブジェクト識別を追跡します (データ シートの例については、補足ファイル 1を参照してください)。
注:テープを取り外すには、毛を抜くと痛みを引き起こすので、テープを取り外ししないでください。それは単独で脱ぎ捨てることができるか、水ベースの潤滑剤はそれを取り除くのを助けることができるか、またはバリカンで剃ることができる。不要な時間にテープが外れた場合は、余分なマーキングテープを準備し、豚が豚を拘束するのではなく、食事を食べている間にそれを再適用します。
3. HAT セッション
- セッションが行われるたびに、テスト人間に同じ帽子、カバーオール、ブーツ、臭いなどを着用しせます。
- 治療の前に毎日、少なくとも3倍、その後毎日セッションを行う。
- 豚は、セッションを開始する前に、ペン内の任意の領域にすることができます。セッションを開始するには、テスト人間にボウルまたはペンの前にトリートメントをドロップし、クリッカー3xをクリックするように依頼します。
- テスト人間は、テスト中に豚の視界から手を置き、静止する必要があります。別の研究者にデータ シート上のセッションの開始をマークし、タイマーを開始しを行います。120 sの後、研究者は静かに次の被験者に移動し、テストを再開するためにテスト人間に合図します。
4. ソフトウェア用ハットエソグラムの確立
- 特殊なソフトウェアを使用して、1 つのプロジェクトの下にエトグラム (図 1および図 2および補足ビデオ 1を参照) を作成します。
注:空間的な行動は、人間に対する動物の位置です。エトグラムでは、空間リレーションシップを動物のペンに合わせてカスタマイズし、新しいペンのセットアップを使用するたびに公開する必要があります (図1)。このカテゴリ内では、動作は相互に排他的と見なされます。スペースは 4 つの領域に分かれており、アプローチのレベルはさまざまです (図1)。エリアは、ハウジングタイプ間で標準化されています。最も近い、または登る(Cl)は、豚が人間へのアクセスを得るためにフェンスに登るかもしれないことを意味します。したがって、登山は、豚が最も積極的に人間との接触を求めていることを示す空間的な行動と見なされます。閉じる(Co)は、人間の61センチメートル以内の領域を示す。中間(M)は、ヒトから61〜122cm以内の領域である。遠い(F)は、人間から123cm以上の面積である。 - 構造挙動は、全身または身体の一部の向きに焦点を当てています(図2)。2 つの構造カテゴリを作成します: 1) 豚の鼻の位置と 2) 豚のアクティブな状態。図2Aを使用して方向を識別する(方向1は豚が鼻を人間に向けることを示し、方向2は豚が鼻を人間から遠ざけることを意味する)。
- 活動行動(図 2B)を、NNOB、NNOB なしで立つか歩く、および NNOB なしで休息するという 3 つの相互排他的な状態に分割します (ビデオのエトグラムの色分けを参照)。
注:NNOBは、豚が口、口、嗅ぎ、顔を使って、親しみやすさや新しい機会を探すために非栄養物を舐め、嗅ぎ、噛む、こすり、または根付きであることを記述するために使用されます。したがって、このアクティブ状態にある場合、ヒトに関心を持ち、アプローチ状態にする。オーバーヘッドカメラを90°の角度で使用する場合、豚の鼻の位置と頭の動きはNNOBの指標です。時折、豚は切り刻んだり、恥をかいたりします。鼻は見えますが、頭は上下に動きます。NNOBなしで立つか、歩くかは、ブタが直立位置にあり、頭部が静止していて、鼻が基板やチョンピングに触れていない場合に記述するために使用され、これはアプローチ状態の少ないことを意味する。NNOBなしの休息は、豚が横たわっているか座って休んでいるときに記述され、このカテゴリーの行動の下で最もアプローチ状態が少ない。
5. 効率性と信頼性のためのビデオのタイムスタンプ
- データ コレクターによって記録された開始時間に基づいて、フッテージを正確な 3 分のセッションに編集します。タイムスタンプの方法は、セッションあたり 9 分かかります。
- ビデオにタイムスタンプを付けるには、トレーニングを受けたオブザーバーを最大 2 人まで使用します。
注:2 つのオブザーバーを使用する場合、観測点内変動を定量化、評価、調整し、オブザーバーが同じサンプルビデオにタイムスタンプを付けた後にピアソン相関係数として報告する必要があります(方法については、Martin を参照してください。ベイトソン25)。 - 再生速度を通常の速度の 1 倍 (30 fps) に設定します。フレームごとに一時停止、巻き戻し、またはタイムスタンプフレームを使用しないでください。
-
相互に排他的な動作の各カテゴリを個別にタイムスタンプします。
- タイムスタンプの空間動作:ビデオを再起動します。
- タイムスタンプ構造の動作:ビデオを再起動します。
- 構造/鼻位置の動作のタイムスタンプ 。
- データを要約するには、各動作結果の継続時間 (補足ビデオ 2および3を参照) を使用します。期間の測定値は、カテゴリごとの時間のパーセンテージに変換する必要があります。
6. アプローチインデックス
- 各構造と空間的な動作が組み合わされ、AI が作成されるように数式 (図3) を適用します (図 3、図4)。 AIは、図(図5)または表形式で別々に報告動作やカテゴリに加えて使用されます。
注:ソフトウェアの詳細については、資料の表を参照してください。各カテゴリ内で、動作時間は最初にパーセンテージに変換されます (動作の期間をテスト セッションの合計期間で割った値)。各動作は、アプローチのレベルに基づいて重み付けされます(図 3)。回避動作(鼻を向けた後、離れた領域の休止時間のパーセンテージ)に 0 を掛ける。中程度のアプローチ動作(中間領域の時間のパーセンテージ、人間に向かって、まだ頭を持って立っている)は1で乗算されます。最も高いレベルのアプローチ動作(近い領域と最も近い領域の時間のパーセンテージと NNOB を示す時間) に 2 を掛けます。次に、各カテゴリは、空間、鼻の向き、およびアクティビティに対してさらに重み付けされた 3、2、および 1 です。パーセンテージスケールを作成するために定数(0.10)が適用されます。たとえば、ブタが人間と向き、近い/最も近い領域にあり、テスト セッション全体で NNOB を実行する場合、AI は 100% (図 3の赤い豚) に注意してください。対照的に、ブタが遠い領域にあり、人間に直面しておらず、テストセッション全体の間に休息位置にとどまる場合、AIは0%(図3の黒豚)である。近いゾーンの豚は、人間から離れて頭を持って立っている場合、中間領域でNNOBを実行する豚と同じAIを持つことができます(図3のオレンジ色の豚)。
Representative Results
3つのハウジングタイプ(A、B、C;図1を参照)は、HATの3つの異なるラボで使用されました。構造挙動カテゴリと頭と体の向きは、図2に示すように、すべての実験室および実験でHATで使用されました。表1は、HAT中に前処理された健康な豚から得られたデータを用いて行われた3つのハウジングタイプすべてから収集されたデータと説明統計量を表す。次に、HAT中に得られたデータからAIを計算する式を開発しました(図3参照)。結果は、AIの使用が収集されたデータの変動(表1)を減少させたことを示している。可変データが少ないと、実験動物の使用量が少ないため、より小さな違いを検出できるため、これは重要な発見です。
表 1の場合、PROC UNIVARIATE 手順を使用して説明的な統計情報を取得しました (特定のソフトウェア情報については、材料の表を参照)。各ラボのハウジングタイプの挙動の結果を比較するために、MIXEDプロシージャと繰り返し測定モデルを用いて使用した。豚はランダム変数として扱われた。共分散構造として1次自己回帰型が選択されました。最小正方形の平均は、Tukey-クレイマー調整方法を使用して分離されました。有意性はP ≤0.05として定義された。
次に、HAT の各試験セッションに同一人物または別の人間実験者を使用するかどうかを決定した。なじみのない動作応答と使い慣れた応答を比較するために、MIXED プロシージャと繰り返しメジャー モデルを使用しました。豚はランダム変数として扱われた。共分散構造として1次自己回帰型が選択されました。最小正方形の平均は、Tukey-クレイマー調整方法を使用して分離されました。有意性はP ≤0.05として定義された。AIは、テスト中に使い慣れていない人間が使用された場合と比べて、AIに違いがないことがわかりました(表2のデータを参照)。豚が人との有害な相互作用を持ったことがない場合、彼らは通常、一般化し、食品26と肯定的にすべての人々を関連付けた。
HAT プロトコルの順化期間は、ハウジングタイプ A (336 テスト セッション) からのブタのアプローチ インデックスから決定されました。HATは到着後8日目に始まり、おなじみの人間(前の週に豚の取り扱いに費やした)と見知らぬ人間(豚と以前に接触したことがなかった)によって2回行われました。HAT の結果に対する時間の影響を決定するために、繰り返しメジャー モデルを使用した MIXED プロシージャを使用しました。豚はランダム変数として扱われた。共分散構造として1次自己回帰型が選択されました。最小正方形の平均は、Tukey-クレイマー調整方法を使用して分離されました。有意性はP ≤0.05として定義された。前述したように、データは、身近な人間の暴露または不慣れな人間の暴露からの応答の違いを検出しませんでした(表2)。ただし、順化期間は、他のすべての日よりも大幅に低い AA を表示する 9 日目、11 日目、および 13 日目に基づいて決定されました。ベースラインには順応後に最低 3 回の測定値を含める必要がありますが、モデル内の共変量として AI 平均を計算するセッションを 6 回お勧めします。
HAT法がmTBI処理された豚とシャム処理されたブタを区別できるかどうかを判断するために、HATデータは1日前(-1)と3日後に麻酔29のみ(シャム)または衝撃波を用いた麻酔および爆風暴露で治療した後の12匹の豚からチューブ29からピーク psi 47.4 ± 13.6 SD の長さ 4.7 ± 0.9 ミリ秒 SD (ブラスト)。データは、統計ソフトウェアプログラムにおける混合モデル手順を用いて、制限された尤度分散分析によって分析された。この分析は、治療、時間、およびそれらの相互作用の違いを決定しました。モデルからの最大SEMが報告され、P < 0.05 が有意と見なされました。AI は、すべての動作を包含します (図3)。治療後1日目と2日目に、AIはシャムブタ(P< 0.05;図4)。行動は、相互に排他的なカテゴリ内で分析および提示することができます (図5)。近い空間行動測定は、治療後1日目と2日目にシャムブタから識別ブラストブタを測定します (P < 0.05;図5A)。同様に、鼻方向、休息時間、およびNNOB測定は、処置後1日目および2日目にブラストブタからシャムブタを区別した(図5Bおよび5C)。

図1:3つの異なる実験室用住宅タイプの行動の空間カテゴリ。エトグラムは、ヒト(フットプリント)に関連して、およびブタの大きさと空き領域の量に関連して設定されます。このカテゴリーの行動の最大のレベルは、ブタが人間に最も近いパネル(Cl;最も近いまたは上昇)に登ろうとするときです。訓練を受けた観察者のタイムスタンプは、ブタの耳以上が空間領域にある場合、「近い」(Co; 0-61 cm)、「中間」(M; 61-122 cm、人間から61〜122センチメートル)、および「遠い」(人間から123センチメートル)。各実験室のペンは、1日2回の給餌、水やり(W)、およびおもちゃのための1つまたは2つのボウルで設定されました。(A) 各50キロのイノシシは、おろし床を持つ190センチメートルx 114センチメートルペンで一戸建てでした。(B) 各50キロのイノシシは、ペンの後ろにすりおろした床と排水管を持つ黒いマットの上に収容されました。(C) 約10kgのイノシシは、コンクリートフローリング、マット、排水管、固定ボウルとおもちゃで、274 x 366 cmのペンでペアで収容されました。カラーストリップ(緑と青など)はマーキング戦略を表します。図内のすべての豚は、ビデオ上の豚をマークおよび識別するための例として、緑色または青色のパッチでマークされています。この図のより大きなバージョンを表示するには、ここをクリックしてください。

図2:3つの実験室と実験すべてで採用されている構造行動カテゴリ。(A) 頭の向きのカテゴリでは、ブタは人間または移動物体に向かって、または離れて向いていました。(B) 体の向きのカテゴリでは、豚の頭がダウンしていたか、非栄養的な経口行動(NNOB)を実行しました。直立した位置で、立っているか歩いているが、頭は動いたり下がったりしない。座ったり横んだりする休息状態で。この図のより大きなバージョンを表示するには、ここをクリックしてください。
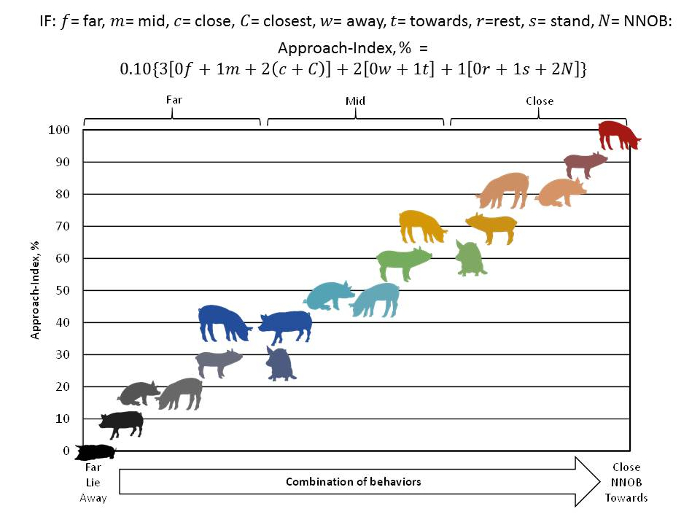
図 3: インデックスの数式と図にアプローチします。アプローチインデックスは、振る舞いのすべての組み合わせを0~100のスケールに配置するために開発され、0は最もアプローチ状態の少ない状態(遠いセクションでは鼻が離れ、頭がまだ横たわっている)と100の近いセクションに豚である。、鼻は人間に向かって指し、NNOBを実行する。ソフトウェア プログラム (詳細については、材料の表を参照) を使用して、動作を直線的に整列するように動作を測定しました。各ブタ構造体は、各カテゴリから線形に整列するデータポイントを表します。各カテゴリ内で、動作の期間は最初にパーセンテージに変換されます (動作の期間をテスト セッションの合計期間で割った値)。次に、各動作はアプローチのレベルに基づいて重み付けされます。回避動作 (遠い領域の時間のパーセンテージ、休息、鼻を向いた時間) に 0 を掛けます。中程度のアプローチ動作(中間領域の時間のパーセンテージ、人間に向かって、そして頭を静かに立た)に1を掛けます。アプローチ動作の最大レベル (近い領域と最も近い領域の時間のパーセンテージ、 NNOB を実行する) に 2 を掛けます。次に、各カテゴリは、空間、鼻の向き、およびアクティビティに対してさらに重み付けされた 3、2、および 1 です。定数 (0.10) が適用され、0 ~ 100% の範囲全体にわたってデータをスケーリングできます。ヒートマップのような配色は、最も接近状態の豚と最も接近状態の豚 (黒) を表すために使用されます。この図のより大きなバージョンを表示するには、ここをクリックしてください。

図4:ブラスト波露光で処理した豚のアプローチ指数。この図は、1日前(-1)及び麻酔のみ(シャム、n=6)または麻酔および爆風波曝露の47.4±13.6 SDの長さ4.7±0.9ms SDで治療した3日後のブタのアプローチ指数を示す。 エラー バーは SEM を表します。治療のP値 = 0.032、時間 = 0.033、および治療 x 時間 = 0.012。データは、統計ソフトウェアプログラムにおける混合モデル手順を用いて、制限された尤度分散分析によって分析された。この分析は、治療、時間、およびそれらの相互作用の違いを決定しました。モデルからの最大 SEM が報告され、*P < 0.05 が有意と見なされます。この図のより大きなバージョンを表示するには、ここをクリックしてください。

図 5: 動作を表示する積み上げバーの方法。これらのパネルは、(A)空間的挙動、(B)鼻方向、および(C)1日前(-1)と麻酔のみで治療した3日後のブタの活動を表示するスタックバー法を示す(シャム、n) = 6)または麻酔プラス爆風のpsiに47.4 ±13.6 SDの長さ4.7 ±0.9ミリ秒SDの長さのためのブラスト波暴露をこの実験に使用した。相互に排他的な動作はすべて、各積み上げ棒グラフで表すことができます。(A) 空間動作の処理 x 時間P-値は遠い = 0.060、中間 = 0.110、*close = 0.014、最も近い = 0.557 です。(B) 鼻方向の処理 x 時間P-値は < 0.001*;(C) 処理 x 時間P-アクティビティの値は > 0.10;処理P値は残り = *0.046、スタンド = 0.584、および *NNOB = 0.042 でした。プールされたSMSは、(A)7.5%、(B)9.6%、(C)9.7%であった。各行動結果は、統計ソフトウェアプログラムの混合モデル手順を用いて制限された尤度分散分析(特定のプログラムの材料表を参照)を用いて分析し、チャートに組み合わせました。分析は、治療、時間、およびそれらの相互作用の違いを決定しました。モデルからの最大SEMが報告され、*P < 0.05が有意と見なされた。この図のより大きなバージョンを表示するには、ここをクリックしてください。
| 住宅タイプ全体の分散統計 | すべての正常な豚データの記述統計 | 違います。実験単位 | |||||||||||||||||||
| ハウジングタイプ | P- | 違います。 | 分位数、% | コントロール1から Δ% を検出する | |||||||||||||||||
| A | B | C | Sem | 値 | Obs。 | Μ | Sd | CV% | Sem | 分 | 25名 | 50歳 | 75歳 | 最大 | 25名 | 50歳 | 75歳 | 100人 | 200年 | ||
| アプローチインデックス、% | 75.4歳 | 69.2歳 | 76.6歳 | 5.5年 | 0.318円 | 288の | 74歳 | 17歳 | 23歳 | 1 | 0 | 70歳 | 80歳 | 84歳 | 99歳 | 18歳 | 4 | 3 | 3 | 3 | |
| ペンの位置の持続時間、% | |||||||||||||||||||||
| はるか | 8.5a | 5.3a | 23.0b | 4.8年 | 0.008 | 288の | 10歳 | 20歳 | 200.1年 | 1.2年 | 0 | 0 | 0 | 10歳 | 100人 | -- | 336の | 149の | 84歳 | 21歳 | |
| 半ば | 18.9年 | 46歳 | 13.75年 | 16.2年 | 0.066 | 288の | 23歳 | 29歳 | 125名 | 1.7年 | 0 | 2 | 10歳 | 32歳 | 100人 | 526の | 131の | 58歳 | 33歳 | 8 | |
| 閉じる | 72.4 | 43.9b | 62.4 | 12.8年 | 0.032 | 288の | 23歳 | 29歳 | 123.9年 | 1.7年 | 0 | 47歳 | 78歳 | 93歳 | 100人 | 509の | 127の | 57歳 | 32歳 | 8 | |
| 最も近い (登る) | 0 | 8.9年 | 0 | 3.1年 | 0.001 | 288の | 67歳 | 32歳 | 47.8歳 | 1.9年 | 0 | 46歳 | 80歳 | 95歳 | 100人 | 74歳 | 19歳 | 8 | 5 | 3 | |
| 閉じる + 最も近い | 72.5年 | 53歳 | 62.3歳 | 14.9年 | 0.311 | 288の | 68歳 | 32歳 | 46.6歳 | 1.9年 | 0 | 46歳 | 78歳 | 93歳 | 100人 | 74歳 | 19歳 | 8 | 5 | 3 | |
| 活動期間、% | |||||||||||||||||||||
| 頭をじっとして座る | 5.6 | 0.0b | 17.0°C | 1.8年 | 0.001 | 288の | 1.3年 | 5 | 393.7年 | 0.3年 | 0 | 1 | 3 | 7 | 59歳 | -- | -- | 579の | 326の | 82歳 | |
| 頭を静止したままスタンド/ウォーク | 48.3 | 63.6a,b | 83.5b | 10歳 | 0.006 | 288の | 52名 | 43歳 | 82.1歳 | 2.5年 | 1 | 7 | 47歳 | 100人 | 100人 | 226の | 57歳 | 25名 | 14歳 | 4 | |
| ノブ | 81.5歳 | 57.7歳 | 71.1年 | 13.3年 | 0.109 | 288の | 77歳 | 28歳 | 36.4歳 | 1.7年 | 0 | 66歳 | 91歳 | 98歳 | 100人 | 44歳 | 11歳 | 5 | 3 | 3 | |
| ヘッド方向、持続時間、% | |||||||||||||||||||||
| 離れて | 24.7 | 17.4 | 50.7b | 4.5年 | 0.001 | 288の | 26歳 | 21歳 | 79.3年 | 1.2年 | 0 | 10歳 | 22歳 | 39歳 | 92歳 | 212の | 53歳 | 24歳 | 13歳 | 3 | |
| に向かって | 75.3 | 82.6 | 49.3 b | 4.5年 | 0.001 | 288の | 74歳 | 21歳 | 27.8歳 | 1.2年 | 8 | 62の | 79歳 | 90歳 | 100人 | 26歳 | 6 | 3 | 3 | 3 | |
表 1: このデータ・セットを作成するために、すべてのハウジング・タイプについてベースライン HAT 測定値を調べました。行動結果は、統計分析ソフトウェアのMIXED手順を用いて、制限された尤度分散分析によって分析された。これらの分析により,各実験室住宅タイプの行動持続時間とアプローチ指数の違いを決定した.モデルからの最大SEMが報告され、P < 0.05 が有意と見なされました。また、統計分析ソフトウェアのUNIVARIATE手順を説明的な統計に用いた。次に、信頼値(CV)%を実験単位計算機27に入力し、2つの治療間の予想差の条件を調べた。
| 治療 | P値 | |||||
| おなじみの | なじみ | Sem | Trt | 時間 | TRT*時間 | |
| アプローチインデックス、% | 84.8歳 | 84.4歳 | 3.06 | 0.7660000 | 0.002 | 0.66100 |
| ペンの位置の持続時間、% | ||||||
| はるか | 10.7年 | 10.1年 | 3.49件 | 0.844円 | 0.008 | 0.522年 |
| 半ば | 18.7年 | 17.6年 | 3.38件 | 0.717 | 0.014 | 0.918円 |
| 閉じる | 70.4年 | 72.3年 | 5.25名 | 0.617 | <0.001 | 0.895円 |
| 活動期間、% | ||||||
| 嘘または座る、NNOBなし | 5.8件 | 5.8件 | 0.8年 | 0.995年 | <0.001 | 0.901 |
| 立つか歩くか、NNOBなし | 5.5年 | 5.5年 | 1.4年 | 0.995年 | <0.001 | 0.524年 |
| ノブ | 82.1歳 | 83.3歳 | 4.12 | 0.722 | 0.0029 | 0.617 |
| ヘッド方向、持続時間、% | ||||||
| 離れて | 23.9歳 | 23歳 | 2.81件 | 0.72500 | <0.001 | 0.329 |
| に向かって | 76.1年 | 77歳 | 2.8年 | 0.72500 | <0.001 | 0.329 |
表2:ハウジングタイプAの7匹の豚に対して実験を行った。毎日2回のセッションが行われました。各セッションでは、1人の身近な(女性)または7人(男性3人と女性4人)の不慣れな人間のうちの1人がHATで使用されました。同じ身近な人が先に行き、7人の見知らぬ人が使われました。統計解析ソフトウェアの分散分析モデルを調べ、治療(なじみのあるまたは不慣れ)、時間(日)、および相互作用について調べた。
補足ビデオ1:字幕付きオブザーバーソフトウェアのセットアップ。このファイルをダウンロードするには、ここをクリックしてください。
補足ビデオ 2: 字幕付きデータエクスポート。このファイルをダウンロードするには、ここをクリックしてください。
補足ビデオ3:字幕付きデータ分析。このファイルをダウンロードするには、ここをクリックしてください。
補足ファイル 1: データ収集シートの例。このファイルをダウンロードするには、ここをクリックしてください。
Discussion
最先端のイメージングで検出可能な解剖学的および構造的変化をもたらさない脳への軽度の損傷は、28を同定して治療することは困難であり得る。しかし、mTBIを有する患者は、脳に重大な損傷を引き起こす可能性のある追加の侮辱に特に脆弱であり、したがって、この集団を同定することが重要である。mTBIのミニブタモデルで開発された行動試験は、ブタがヒトと同様の生理学を有し、アンヘドニア8、9、10のような同様の感情状態を発現するため、ヒトmTBI患者に特に関連している。 、20.ここでは、非侵襲的な、ペン内行動テスト(HAT)を開発し、mTBI豚とシャムブタを区別するのに十分な感度があることを示した。さらに、ハウジングとブタの種類にまたがるユビキタスなHATの間に観察される行動のために加重指数(AI)が開発されました。
変更とトラブルシューティング:
HAT の方法論は、テスト6の信頼性、再現性、および妥当性を向上させるためのエスソロジー ガイドライン25およびいくつかの試行錯誤戦略に基づいて確立されました。信頼性対策は、テストの長所と限界を特定するのに役立ちました。信頼性は、測定が繰り返し可能で一貫性があり、ランダムエラー28、29から自由である程度を定義します。我々は以前にHATの観測内および相互観測点の信頼性について報告しており、追加の構造エトグラムにより、信頼性は同様に高い(ピアソンのR2 > 0.90)期間6。頻度と待機時間の測定には訓練を受けた観察者が必要ですが、期間測定は観察者に依存しにくく、したがって、ラボ全体でより信頼性が高い30.
実験室内の信頼性と実験室間の再現性は方法に依存します。私たちの研究室では、ビデオシステムは継続的に記録され、ファイルは最初は5分のファイルとして保存され、いくつかのHATセッションは2つのファイルにわたって発生しました。データシートの正確な時間を使用してビデオをクリップして組み合わせると、間違いが少なくなりました。エトグラムを開発する前に、オブザーバーはビデオフッテージを一時停止、停止、巻き戻して、エトグラム全体のすべての動作をタイムスタンプすることを許可しました。この方法は、各サンプルのタイムスタンプの変動を引き起こしただけでなく、3分から20分の範囲で、観察者間と観察者内の信頼性もほとんどの動作では不十分でした。そのため、再生速度を設定し、各カテゴリにタイムスタンプを設定しました。したがって、1 つのカテゴリで信頼性が低い場合、オブザーバーは、定義とフッテージを一緒に調べた後、エトグラム全体ではなく、カテゴリだけを個別に再タイムスタンプしました。セット再生メソッドとカテゴリメソッドを使用すると、各サンプルのタイムスタンプに必要な時間を一貫して予測できます。1 か月以上にわたるプロジェクトでは、コード化されたビデオの定期的なレビューと観察者内の信頼性を測定することが重要です。
信頼性と再現性を低下させるもう 1 つの要因は、ビデオのセットアップです。当初はハンドヘルドカメラと三脚を使い、ペンからペンに移動しました。この方法を使用した場合、豚は HAT の前に三脚とカメラに導入する必要がありました。さもなければ、豚はテスト人間よりも三脚と動きに反応するように見えた。さらに、オーバーヘッド以外のカメラアングルはタイムスタンプ中の観察者の視界を制限し、空間の深度知覚は空間行動測定における観測者間の変動を増加させた。そこで、固定カメラでプロトコルを開発しました。この方法を使用する場合は、各テストの前にカメラが正しく配置されていることを確認するために特別な注意が必要であり、各豚のセッション間のセットアップにはより多くの時間が必要です。しかし、連続ビデオオーバーヘッドシステムは、最初のHATの少なくとも24時間前に真夜中に最初の記録を開始する必要があることを学びました。多くのビデオシステムのタイムスタンプ表示は正確ではなく、フレームに同期しています。したがって、表示時間に依存しなくなりました。真夜中は、正確なフレームキャプチャとビデオ編集のために許可され、タイムスタンプ表示は使用されていませんでした。
さらに、このテストのトラブルシューティングを行う際には、豚の順応とルーチンの設定が重要でした。環境に十分に順応していない豚の映像では、HATの間にペーシングが観察された。これは、ブタが探索的状態32ではなく、攪拌状態31にある可能性があることを指標とする。3週間以上の順化期間は、実験でペースを上げる豚の数を減らすかもしれない。ただし、すべてのサンプリング期間を通じてペーシングが持続する場合は、このエトグラムを調整して、歩行と静止を含むように調整する必要があります。
有効性は、測定が25に尋ねられる質問の意図された範囲を表す範囲です。最初に HAT を開発したときは、空間エトグラムのみを使用しました。空間エトグラム行動の定義は、正確かつ具体的には人間の被験者に近接していることを記述し、彼らは豚がそれ自体と人間の間にどれだけのスペースを残しているかを直接観察者に伝えます。しかし、これらの方法を新しい実験室のセットアップに適用する必要があると、空間エトグラムが実験室固有であることを認識しました。ペンの寸法と他のオブジェクトの配置は、空間エトグラムの結果に影響を与えます。したがって、ペンの設定が以前に報告されていない場合は、ペンの測定値と詳細を含む図を公開する必要があります。ペン環境に関するレポートに加えて、構造挙動がエトグラムに追加されました。空間的な動作とは異なり、構造挙動はラボ全体でより簡単に評価できます。これらの動作は、豚のアクティブ状態のレベルを具体的に記述するため、有効性を持っています。豚が休んでいるときには、近づく意欲がなく、立っている豚のように素早く近づく位置を変えることができません。同様に、NNOBを表示するブタは探索的な状態ですが、立っている間に頭を持つ豚はカタトニック状態である可能性が高くなります。鼻の向きは、鼻、耳、目が人間に関する情報を収集するために使用するものであるため、有効性に役立ちます。
テクニックの制限事項:
この技術に関する潜在的な懸念は、テストヒトに対する豚の応答の変動である。さらに、豚はテスト人間の手を見て、その人によって意図しない手がかりを引き起こす可能性があります。したがって、これらの制限は、1)身近な人間および不慣れな人間に対する豚の反応を実験的にテストし、2)ペレットが落とされた後、テスト人間が静止し、手を置くことを標準化することにより、実験的に表明された。豚の視力データは、HAT(表2)の間に治療または治療x時差がないことを示し、HATは、身近な人間または不慣れなヒトのいずれかによって投与できることを示唆した。他の研究者は、豚は、以前の相互作用11、12、13に基づいて人間について一般化する傾向があることを示唆しています。したがって、豚の人間との以前の経験は肯定的である必要があります。この課題は、警戒的な実験設計で改善することもできます。各ブロックについて、関心のある治療ごとに十分な数の実験単位が必要です。
本研究では、3つのハウジングタイプすべてに関するすべてのビデオをタイムスタンプする経験豊富なオブザーバーは2人しかいなかったが、特定の行動結果に対する住宅タイプの違いがあった(表1)。たとえば、ハウジング タイプ B の豚は、ハウジング タイプ A および C の豚よりも頻繁に最も近い領域に入ります。これは、ペン素材の違いが原因である可能性があります。ハウジングタイプBでは、ペンの前面は、HATの間に豚がゲートを登ることを可能にする水平バーを持つチェーンリンクされたゲートでした。一方、ハウジング タイプ A と C には、垂直バーとブタが登る水平面が少なくなりました。この変動性は、ハウジングタイプ間でそれらを比較する前に、近い領域と最も近い領域での期間の支出を追加することによって改善することができます (表 1;P > 0.10)。しかし、ハウジングタイプCの豚は、ハウジングタイプAとBの豚よりも遠い地域で過ごした時間が多い(表1;P < 0.05) これは、ペンの前面ではなく、ペンの背面に水やりが配置されたためである可能性が高いです。これは、実験室が水やり器、ボウル、おもちゃの配置を標準化し、豚が別の領域にオブジェクトを移動しないように固定されていることを確認する場合に改善することができる制限です。
このテストは、すべてのタイプの実験室のための素晴らしいアクセシビリティを持っていますが、前述のように、手動でスタンプされた空間エトグラムと測定値は、実験室間でより異なります。それにもかかわらず、身体および頭部構造のエトグラムはユビキタスである。ブタの検証済みの自動追跡にアクセスできるラボでは、距離が移動し、移動速度が行動対策の追加結果になる可能性があるため、空間エトグラムを手動ではなく自動的に追跡することで利益を得ることができます。帽子。テスト領域や自動追跡技術ではなく、ペンのセットアップと従来の技術からの制限は、AI式を適応させることによって改善されるかもしれません。AIは、個々の豚がペンスペースをどのように使用し、人間に興味を示すかについて、標準化された測定と用語を提供します。この計算は、一般的な行動測定に由来し、脳震盪性mTBIのブタモデルおよび、おそらく、他の臨床上の傷害または病気の状態に敏感である。さらに、AIは実験中のランダムな変動を減らし、より多くの実験固有の測定に依存する方法よりも実験や実験室間でより簡単に比較される可能性があります。これらの動作は治療全体の標準的な測定値であるのに対し、空間的な動作はペンのセットアップ、ペンのブタの数、および追跡システムに依存するため、構造挙動は、この数式の基礎を提供しました。例えば、2匹の健康な豚がペンでテストされると、一緒に接近して同様の空間的な動作を行うことがわかりましたが、最初に続くブタは、人間に向かってより多くのNNOBを発現するのではなく、その鼻の方を向き合う可能性があります。をリードする豚がセンチネルとして機能するからです。それにもかかわらず、AIはペアの行動からでもこの変動を減らすのを助けます。
AIは実験室間でテストを標準化するための優れたツールセットですが、研究者は、特に十分なパワー(実験単位と実験単位)を持っている場合は、実験室や実験内でテスト固有の行動結果を調べたいと思うかもしれません。単一の実験で繰り返しテスト)。したがって、すべての行動結果、分散、分布、および各特定の行動に対する動物数の計算された検定を含む表1がここに含まれていた。たとえば、研究者が HAT の間に豚が一貫して登ることができるペン環境があり、その治療が登山行動の 75% の差を超える原因を知っている場合、測定された分散に基づいて動物の数を正当化できます。新しい行動がエトグラムに追加された場合、科学者は、インデックスにそれらを組み込む前に、アプローチまたは撤退を示す行動を正当化する必要があります。例えば、ペンの壁に沿って実験ペース内の動物のほとんど(すなわち、チグモタキシス)32の場合、この挙動の持続時間は、体構造エトグラムカテゴリに組み込むことができる。この動作は、詳細な積み上げ棒グラフ (図5) または表形式で表形式で表し、インデックス計算を適用する前にスタンドスティルで合計できます。したがって、AI はラボ全体でユビキタスな動作を表すことができますが、追加の固有の動作は個別に表現できます。
既存のメソッドに関する重要性:
HATの既存の方法は、動物の福祉を評価するために商業農場の豚のために確立されました。ここでは、実験室の豚のためのプロトコルが確立され、研究者が動物の福祉を評価し、mTBI豚をシャム処理された豚と区別するのに役立ちます。従来のテストでは、オープンフィールド テストを使用する場合があります。このテストは、以前に豚の感情と福祉33を評価するために使用されました.オープンフィールドテストは、もともとオープンスペースと光に対する自然な嫌悪感を測定することによってげっ歯類の感情状態をテストするために設計されました。対照的に、健康な豚は食欲10と同じ刺激を見て、病気、怪我、またはストレス治療の後、彼らは恐怖を表現する可能性が高い。このテストは、より多くの実験室スペースを必要とし、扱われ、オープンフィールドアリーナに配置されることに慣れるために豚を必要とします。実験室が豚を扱うためのスペースとプロトコルを持っている場合、HATセッションを繰り返し、1回のオープンフィールド試験に加えて、治療された動物とシャム処理動物をさらに区別するのに役立つ可能性があります。
プロトコル内の重要な手順:
プロトコルの最初の 3 つの手順は、HAT 対策を成功させるうえで最も重要です。豚ごとのセッションは3分しかかからなぎません。ただし、適切な準備は、このテストの信頼性を高めるのに役立ちます。前述のように、カメラの位置と録画のセットアップは、わかりやすく、複製するために重要です。不適切なカメラアングルは、観察者の視界を制限し、測定値にエラーを追加します。見落とされがちなもう 1 つのステップは、ペン内のオブジェクトを修正することです。豚は固定されていない物体を動かし、これは人間に近づく動機に影響を与える可能性があります。セットアップと管理システムは、テストを一貫して実行する前に、豚が環境に順応する必要があるため、重要です。自宅のペンやルーチンに十分に順応していない、またはストレスを経験している豚は、ペン34の背面ではなく、他の領域で排便します。排便領域は、アプローチする彼らの動機に影響を与える可能性があります。カメラビューから、観測者は個々のブタを識別できる必要があります。しかし、マーキングスキームは、観察者25に偏りが生じ、動物の治療に関する情報を提供しないことが重要である。
豚を識別することは、一人暮らしている場合でも、適切なブタの正しい行動データを得るために非常に重要です。豚はしばしば治療のために移動され、マーキングは、それが取り除かれ、そのペンに戻された後、彼らが同じ豚を見ていることを観察者を保証します。豚は、ハウジングタイプCのように、ペアで収容することができるので、豚を識別することが非常に重要になります。家畜マーキング塗料やマーカーは、毎日のアプリケーションを必要とします。したがって、このプロトコルは、医療グレードのテープとタグセメントのスミアの使用を必要とします。テープは長い髪の豚に最もよくくくる。短い髪と乾燥した肌を持つ豚は、長い髪を持つ豚よりも頻繁にテープから剥がされます。
今後のアプリケーション:
要約すると、ここで説明する非侵襲的なペン HAT テストは、mTBI 後のブタの軽度および時間的依存的な変化を検出するのに十分な敏感さである。また、AIと呼ばれる重み付けインデックスを開発し、異なるペンタイプの豚や豚の種類の変化を評価しました。HATはmTBIにさらされたブタの変化を検出するために使用されてきたが、この行動テストは、ストレスまたは病理学的状態を経験している動物の測定可能な行動変化を検出するのに役立つ可能性がある。
Disclosures
著者は何も開示していない。
Acknowledgments
著者らは、海軍研究局(グラント・#12166253)からの資金提供を認めしたいと考えています。さらに、著者は、動物の仕事中に彼らのサポートのためにカンザス州立大学とバージニア工科大学の動物ケアスタッフ、獣医、学生に親切に感謝します。著者らはまた、ナデッジ・クレブスの技術支援に感謝し、学生のシェルビー・ステア、サラ・グリーンウェイ、ミカイラ・ゲーリングの技術支援と追加の動物ケアに感謝したいと思います。
Materials
| Name | Company | Catalog Number | Comments |
| Dome 3.0 Megapixel Cameras with 2.8-12 mm lens set between 2.8-3.2 mm | Points North Surveillance, Auburn, ME | CDL7233S | Lower mm lenses are needed for low-profile pens |
| Manfrotto 244 friction arm kit | B&H Photo | B&H # MA244; MFR # 244 | To mount and secure cameras at a 90° angle |
| Video Recording System | Points North Surveillance, Auburn, ME | NVR-RACK64 | NVR is customized |
| Colored and patterned duct tape attached to a double-sided medical grade tape | MBK Tape Solutions, Chatsworth, CA | 3M 1522H | Sustainable marking of pigs |
| Approach Index Formula generator | Dinasym, Manhattan, KS | Approach Formula | Company will customize macros for specific lab needs |
| Geovision Software | Points North Surveillance, Auburn, ME | Geovision | Software to edit video time into 180 s clips |
| Clicker | Petco | Good2Go Dog Training Clicker | |
| Reward treat (feed pellet, carob chip, raisin, marshmallow) | Variable | N/A | Depending on previous exposure, adult pigs are very neophobic when new food is introduced. Limit-fed pigs can be fed a few pellets of feed. |
| Statistical Analysis System (SAS) | SAS Institute, Cary, North Carolina | SAS 9.0 | Our laboratories preference for analyzing mixed models and repeated measures |
| Observer 11.5 software | Noldus Information Technology, Leesburg, VA | Observer 11.5 | Software to manually timestamp video clips |
References
- Iverson, G. L. Outcome from mild traumatic brain injury. Current Opinion in Psychiatry. 18 (3), 301-317 (2005).
- Taber, K. H., Warden, D. L., Hurley, R. A. Blast-related traumatic brain injury: what is known? The Journal of Neuropsychiatry and Clinical Neurosciences. 18 (2), 141-145 (2006).
- White, H., Venkatesh, B. Traumatic brain injury. Oxford Textbook of Neurocritical Care. Smith, M., Kofke, W. A., Citerio, G. 210, University Press. Oxford. (2016).
- Greve, K. W., et al. Personality and neurocognitive correlates of impulsive aggression in long-term survivors of severe traumatic brain injury. Brain Injury Journal. 15 (3), 255-262 (2001).
- Janusz, J. A., Kirkwood, M. W., Yeates, K. O., Taylor, H. G. Social Problem-Solving Skills in Children with Traumatic Brain Injury: Long-Term Outcomes and Prediction of Social Competence. Child Neuropsychology. 8 (3), 179-194 (2002).
- Luo, Y. Swine Applied Ethology Methods for a Model of Mild Traumatic Brain Injury (Master's Thesis). , Available from: http://hdl.handle.net/2097/35760 (2017).
- Kornum, B. R., Knudsen, G. M. Cognitive testing of pigs (Sus scrofa) in translational biobehavioral research. Neuroscience & Behavioral Reviews. 35 (3), 437-451 (2011).
- Bauman, R. A., et al. An Introductory Characterization of a Combat-Casualty-Care Relevant Swine Model of Closed Head Injury Resulting from Exposure to Explosive Blast. Journal of Neurotrauma. 26, 841-860 (2009).
- Friess, S., et al. Repeated traumatic brain injury affects composite cognitive function in piglets. Journal of Neurotrauma. 26, 1111-1121 (2009).
- Xiong, Y. A., Mahmood, A., Chopp, M. Animal models of traumatic brain injury. Nature Reviews Neuroscience. 14 (2), 128-142 (2013).
- Waiblinger, S., et al. Assessing the human-animal relationship in farmed species: A critical review. Applied Animal Behavior and Science. 101, 185-242 (2006).
- Powell, C., Hemsworth, L. M., Rice, M., Hemsworth, P. H. Comparison of methods to assess fear of humans in commercial breeding gilts and sows. Applied Animal Behavior and Science. 181, 70-75 (2016).
- Hemsworth, P. H., Barnett, J. L., Coleman, G. J., Hansen, C. A study of the relationships between the attitudinal and behavioural profiles of stockpersons and the level of fear of humans and reproductive performance of commercial pigs. Applied Animal Behaviour Science. 23, 301-314 (1989).
- Hulbert, L. E., McGlone, J. J. Evaluation of drop versus trickle-feeding systems for crated or group-penned gestating sows. Journal of Animal Science. 84 (4), 1004-1014 (2006).
- Mills, D. S., Marchant-Forde, J. N. The encyclopedia of applied animal behavior and welfare. , CAB International. Wallingford, UK. (2010).
- Backus, B. L., Sutherland, M. A., Brooks, T. A. Relationship between environmental enrichment and the response to novelty in laboratory-housed pigs. Journal of the American Association for Laboratory Animal Science. 56 (6), 735-741 (2017).
- Price, E. O. Behavioral development in animals undergoing domestication. Applied Animal Behavior Science. 65 (3), 245-271 (1999).
- Plogmann, D., Kruska, D. Volumetric comparison of auditory structures in the brains of European wild boars (Sus scrofa) and domestic pigs (Sus scrofa f. dom.). Brain, Behavior and Evolution. 35 (3), 146-155 (1990).
- Horbak, K. Nosing Around: Play in Pigs. Animal Behavior and Cognition. 1 (2), 186-196 (2014).
- Daigle, C. Parallels between Postpartum Disorders in Humans and Preweaning Piglet Mortality in Sows. Animals. 8 (2), 22 (2018).
- Willner, P., Muscat, R., Papp, M. Chronic mild stress-induced anhedonia: A realistic animal model of depression. Neuroscience & Biobehavioral Reviews. 16 (4), 525-534 (1992).
- Pairis, M., Young, A., Millman, S. T., Garvey, J., Johnson, A. K. Can Fear Be Effectively Assessed in Swine? A Study Measuring Fear Levels during a Human Approach Test. Animal Industry Report. , AS 655, ASL R2470 (2009).
- Grandin, T. Behavioral principles of livestock handling. American registry of Professional Animal Scientist. , 1-11 (2002).
- Weeks, C. A. A review of welfare in cattle, sheep and pig lairages, with emphasis on stocking rates, ventilation and noise. Animal Welfare. (South Mimms, England). 17, 275-284 (2008).
- Martin, P., Bateson, P. How Good are Your Measures. Measuring Behaviour: An Introductory Guide. Martin, P., Bateson, P. , University Press. Cambridge. 72-85 (2007).
- Grandin, T., Shivley, C. How Farm animals react and perceive stressful situations such as handling, restraint, and transport. Animals. 5, 1233-1251 (2015).
- Galyean, M. Sample size calculations I. , Available from: https://www.depts.ttu.edu/afs/home/mgalyean/ (2018).
- Shenton, M. E., et al. A review of magnetic resonance imaging and diffusion tensor imaging findings in mild traumatic brain injury. Brain Imaging and Behavior. 6 (2), 137-192 (2012).
- Walilko, T., VandeVord, P., Hulbert, L. E., Fievisohn, E., Zai, L. Establishing a neurological injury threshold using a blast overpressure model in minipigs. Military Health System Research Symposium. , (2017).
- Coffin, M. J., et al. Side Bias and Time of Day Influenced Cognition after Minipigs were Conditioned Using a Novel Tactile Stimulation Device. Journal of Animal Science. 96, 255-256 (2018).
- Dailey, J. W. Stereotypic Behavior in Pregnant Swine (Master's Thesis). , Available from: https://ttu-ir.tdl.org/ttu-ir/handle/2346/9669 (1995).
- Fleming, S. A., Dilger, R. N. Young pigs exhibit differential exploratory behavior during novelty preference tasks in response to age, sex and delay. Behavioural Brain Research. 321, 50-60 (2017).
- Ramona, D. D., Healy, S. D., Lawrence, A. B., Rutherford, K. M. D. Emotionality in growing pigs: Is the open field a valid test. Physiology & Behavior. 104, 906-913 (2011).
- Matthews, S. G., Miller, A. L., Clapp, J., Plötz, T., Kyriazakis, I. Early detection of health and welfare compromises through automated detection of behavioral changes in pigs. The Veterinary Journal. 217, 43-51 (2016).
