

Summary
사용자 정의, 실시간 공촛점 스캐닝 이미징 시스템의 전체 구조는 설명합니다. 쉽게 동영상 속도 현미경 및 microendoscopy 사용할 수있는이 시스템은, 비용의 일부로 표준 상용 공촛점 시스템을 사용하여 액세스할 수 없습니다 이미징 형상 및 응용 프로그램의 배열을 허용합니다.
Abstract
공촛점 현미경은 빠르게, 높은 감도, 복잡한 시스템의 고해상도 광학 sectioning을 지원, 생물학과 생물 의학 과학에서 귀중한 도구가되고있다. 공촛점 현미경은 정기적으로 세포 2-4 생활에서 특정 세포 목표 1, 모니터 역학을 공부하고, 전체 생물 5,6의 입체 진화를 시각화하는, 예를 들어, 사용됩니다. 같은 공촛점 microendoscopes 같은 공촛점 이미징 시스템의 확장은 생체내 7 고해상도 이미징을 허용하고 현재 임상 설정 8,9에서 질병 이미징 및 진단에 적용되고있다.
공촛점 현미경은 간단한 기하학적 광학를 사용하여 소위 "광학 섹션"을 만들어 입체적인 해상도를 제공합니다. 표준 넓은 필드 현미경에서는 시료에서 발생하는 형광는 객관적인 렌즈에 의해 수집되고 검출기에 직접 전달. 수락 동안영상 얇은 샘플 수, 두꺼운 샘플은 객관적 초점 비행기 위 아래에 생성된 형광에 의해 흐려된다. 대조적으로, 공촛점 현미경은 거부하고, 샘플을 가상, 광학 sectioning 수 밖 초점 샘플 고해상도 입체 표현을 빌드하는 빛을.
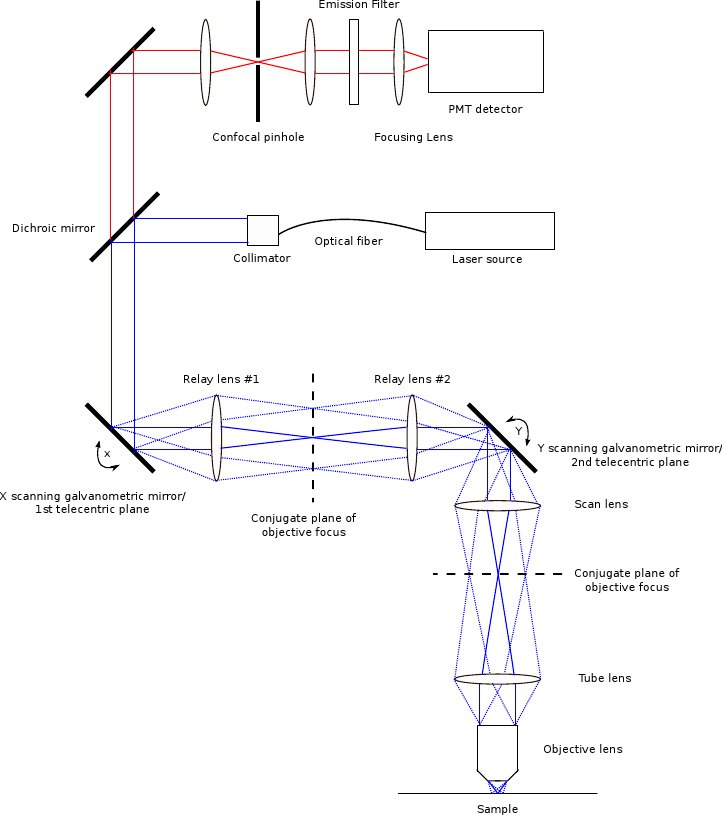
공촛점 현미경은 검출 빔 경로에 공촛점 조리개를 사용하여이 위업을 달성. 목적으로 샘플의 수집 형광은 스캐닝 미러 통해 기본 이색성 거울, 조심스럽게 이상 스톡스 - 이동 형광 방출을 통과하는 동안에는 레이저 여기 빔과 같은 짧은 파장을 반영하기 위해 선택한 거울을 통해 다시 릴레이입니다. 이 긴 파장 형광 신호는 다음 목적 렌즈의 초점 비행기와 정확하게 활용 비행기에 위치하는 핀홀의 양쪽에 렌즈 한 켤레에 전달됩니다. 객체의 초점 볼륨에서 수집 광자는 collimated 아르객관적인 렌즈로하며 핀홀을 통해 공촛점 렌즈에 의해 초점이 있습니다. 초점 평면 위나 아래에 생성된 형광 따라서 제대로 collimated되지 않습니다, 그리고 현미경 초점에서 단 표시등이 표시되는 광학 섹션을 만들고, 공촛점 핀홀 하나 통과되지 않습니다. (그림 1). 따라서 핀홀 효과적으로 한 제한된 공간 위치 감지 방출 confining, 초점 비행기에서 가상 조리개 역할을합니다.
현대 상업 공촛점 현미경은 비교적 간단하고 접근 이전에 복잡한 이미징 절차를 만드는 사용자에게 완전 자동화된 작업을 제공합니다. 이러한 시스템의 유연성과 전력에도 불구하고, 상업 공촛점 현미경 잘 같은 생체내 이미징 애플 리케이션에서 많은 같은 모든 공촛점 이미징 작업에 적합하지 않습니다. 그들의 요구를 충족하기 위해 맞춤형 이미징 시스템을 만들 수있는 능력이 없다면, 중요한 실험 reac 밖으로 남아있을 수많은 과학자에 H.
이 문서에서는, 우리는 기본 구성 요소에서 사용자 지정, 비디오 속도 공촛점 이미징 시스템의 전체 구조에 대한 단계별 방법을 제공합니다. 직립 현미경은 표준 속도 공진 갈바 노 미러 느린 축 스캔되지만, 빠른 스캔 축을 제공하기 위해 공진 갈바 노 미러를 사용하여 구축됩니다. 목적 렌즈 초점이 정확한 스캔 빔을 만들려면 다음과 거울 네 개의 릴레이 렌즈를 사용하여 소위 telecentric 비행기에 위치합니다. 공촛점 감지는 표준 재고품 photomultiplier 튜브 (PMT)를 사용하여 달성되며, 이미지 캡처와에서 Matrox의 framegrabber 카드 및 포함된 소프트웨어를 사용하여 표시됩니다.
Protocol
레이저 파장, 이색성 거울, 광학 필터의 선택이 실험에서 사용되는 특정 염료에 따라 결정되어야합니다. 예를 들어, 알렉사 형석 488 물들일 샘플 공촛점 이미징은 최고 488 나노미터 레이저, 500 nm의 긴 패스 이색성 거울, 그리고 515 nm의 중심 30 NM 대역폭 대역 통과 미러를 사용하여 수행됩니다. 반대로, 빨간색 염료 알렉사 형석 647의 공촛점 이미징은 구성 요소의 다른 세트를해야합니다. 이 프로토콜의 현미경은 400 nm의에 강력하게 흡수하고 450 nm의 이상 방출하는 염료를 시각화하기 위해 지어졌습니다. 따라서 406 나노미터 여기 레이저를 선택하여 425 nm의 길이 통과 이색성 레이저 광선을 반영합니다. 흥분 fluorophores은 선택적으로 적절한 방출 필터를 선택하여 상상하실 수 있습니다. 표시된 곳에 프로토콜을 통해 적절한 광학 장착 하드웨어를 사용하는 것이 중요하다, 부적 절한 또는 임시 변통의 하드웨어뿐만 아니라 정렬을 보유하지 않고 안전 위험 수 있습니다.
<P 클래스 = "jove_title"> 1. 공진 갈바 노 미러 및 릴레이 광학 설정공촛점 스캐닝 시스템의 모든 종류의 건물에서 중요한 개념은 telecentricity 있습니다. telecentric 광학 시스템에서 렌즈는 시스템의 확대가 단순히 초점 길이 1의 비율에 의해 정의되고 그러한 그들의 초점 길이의 합계에 의해 서로 간격입니다. 이것은 배율, 따라서 시스템 속성, 쉽게 렌즈의 선택에 의해 정의됩니다 광학 릴레이 시스템의 구축이 가능합니다. 또 다른 중요한 개념은 또한 "조리개 비행기"로 불리는 소위 "고정"광학 비행기를 포함합니다. 조리개 비행기는 라이트 빔은 측면 운동의 어떤 종류를 받아야하지 않는 광학 경로를 따라 순위입니다. 첫 번째와 두 번째 스캐닝 거울, 그리고 객관적인 렌즈의 조리개 백이 현미경 디자인에 세 중요한 조리개 비행기가 없습니다. 최적의 빔 SCA를 달성하기 위해목표의 초점 비행기에서 nning, 대상이 렌즈의 조리개를 다시 입력 빔은 각도 멋지고, 고정해야합니다. 이 고정, 각도 - 휩쓸 비행기를 생성하기 위해, 우리는 객관적인 백업 개구로 활용에서 첫 번째와 두 번째 스캐닝 거울, telecentric 비행기를 배치해야합니다. 거울과 렌즈 사이에 위치 객관적인 렌즈는 이러한 고정 비행기 (그림 2) 사이의 각도 스캔 광선을 릴레이로 제공하고 있습니다. 스캐닝 미러는 이미징 비행기 (X와 Y)의 주어진 방향을 스캔에 대한 책임 각각 두 개의 스캔 galvos에 장착됩니다. 동영상 속도 이미징에 필요한 라인 스캔 속도를 얻기 위해, 고주파 공진 갈보는 X 축을 (이것 역시 "빠른"축이라고도 함)을 검사해야합니다. 이러한 galvos는 sinusoidal 스캔 패턴을 생성하기 위해 민감한, 폐쇄 루프 피드백 회로를 활용하여 매우 높은 주파수에서 작동 할 수있다, 이것은 빌드에 대해 우리는 8 kHz에서의 갈보을 선택했습니다.
- 설정광학 마운트에있는 섬유 콜리 메 이터가와 약 그것이 모두 수직 및 수평 직선으로 움직인 이러한 조정 나사를 사용하여 광선을 조종. 이제 방어막을 가지고 섬유 콜리 메 이터 앞에서 그것을 장소, 광선이 홍채 센터를 통해 정상적으로 전달하는 등 홍채의 수직 높이를 조정. 다음 떨어진 빔 경로를 따라 콜리 메 이터에서 방어막을 이동하고 빔 아직도 홍채 센터를 통해 여행하는 경우 관찰합니다. 그렇지 않다면, 두 개의 조정 나사를 사용하여 홍채의 빔 위치를 조정합니다.
- 거울의 거의 중앙에 위치 레이저 빔을 빔 경로에 탑재된 이색성 거울을 배치합니다. 테이블에 거울을 클램핑하기 전에, 약 90도에서 광선을 반영하고 약 반영 레이저 빔을의 수직 높이가 변경되지 않도록 반사를 조정 미러 홀더를 회전.
- 자동차를 복용, 레이저 빔 경로에 마운트 공진 갈바 노 미러를 배치E는 레이저 광선이 거울 표면의 정확한 수평 중심에 위치 있는지 확인합니다. 이 프로토콜에서 공진 갈보 미러는 미러 마운트에 직접 expoxied되었습니다. 90도 각도로 레이저 광선을 반영하기 위해 미러 마운트를 돌리세요. 대략 동일한 레이저 빔을 수직 높이를 유지하기 위해 거울에서 반사를 조정합니다.
- 주어진 방향으로 빛을의 광선을 직접하기 위해, 하나는 정의에 의해 레이 여행을 통해되는 공간에 두 지점을 정의해야합니다. 이것은 일반적으로 원하는 수평 및 수직 경로 두명 붓꽃을 배치하고 각 홍채의 중심을 통과하는 레이저 광선을 조작하여 수행됩니다. 자유의 포 정도는 빔을 조정하는 데 필요한, 각 아이리스에 대한 자유의 두 수평 및 수직도 있습니다. 자유의 이러한 학위를 달성하기 위해 가장 일반적이고 가장 간단 방법은 두 조정하는 거울, 또는 "산책"레이저 광선을 사용하는 것입니다.
이 붓꽃을 가지고, 그들의 수직 높이를로 설정단계 1.1, 레이저 광선을 사용하면 참조로 공진 갈보 거울을 반영. 이제 눈에 가이드로 광학 브레드 보드에있는 나사 구멍을 사용하여 직선 아래로 두 붓꽃 클램프. - 이색성 거울과 두 붓꽃의 중심을 통해 레이저 광선을 조종하기 위해 공진 갈보 미러를 조정합니다. 첫 번째 홍채에 빔은 다음 두 번째 홍채 중심 빔의 경로에서 두 번째 미러 (공진 갈보 미러)을 사용하여 센터의 경로의 첫 번째 미러 (이색성 거울)을 사용합니다. 빔이 두 붓꽃을 통해 정렬 때까지 Iteratively 공진 갈보 거울에서 반사되는 레이저 빔 여전히 대략 미러 센터에서 반영되는 내내 보장이 두 거울을 조정합니다. 빔이 이탈있다면, 섬유 콜리 메 이터 탑재를 조정하고 위의 반복 단계를 반복하십시오.
- 두 붓꽃 중심으로 광선으로 우리는 이제 이미지가 우리의 첫번째 정지, telecentric 계획을 것입니다 두 릴레이 렌즈를 삽입합니다E (즉, 공진 갈보 미러) 두 번째 고정, telecentric 비행기로 (즉, 표준 속도 갈보 거울). 이 특정 현미경 들어, 첫 번째 릴레이에서 선택한 렌즈는 같은 초점 거리, "F"가 우리 telecentric 시스템에 두 거울 사이의 거리가 단순히 층되도록. 렌즈가 정확하게 빔 경로에 중심되는 것을 보장하기 위해, 렌즈 정렬 트릭을 사용합니다. 빔 경로의 첫 번째 렌즈를 놓고 렌즈를 다음과 같은 빔 경로에 옆에있는 홍채에 레이저 빔 스폿보세요. 다음 세로 때문에 광선의 수직 중심 홍채 중심에있다는 렌즈의 높이를 조정합니다. 마지막으로, 홍채 중심 빔에 수평 빔 위치를 조정합니다. 두 번째 렌즈에 대해이 같은 절차를 수행합니다.
2. 두 번째 스캔 미러를 설정하고 현미경을 회전
- 두 번째 telecentric 비행기의 정확한 위치를 찾으려면에 공진 갈보를 연결그 장치를 검색하고 전원을 켜십시오. 두 렌즈를 통해 스캔 빔을 추적하기 위해 흰색 명함을 사용하십시오. 당신은 레이저 빔을 완전히 고정 나타납니다 공진 갈보에서 층의 대략적인 거리에서 telecentric 비행기를 찾을 수 있습니다. 브레드 보드에이 위치를 표시합니다.
- 이 정확한 telecentric 비행기 위치에서 표준 스캔 갈보 거울을 위치하고, 거울의 높이와 telecentric 비행기에서 빔이 스캔 미러의 정확한 중심을 타격 그러한 위치를 조정합니다. 그것은 전력 최대 미러 컨트롤 하드웨어를하고 거울이 과정은 중립 위치로 들어가 있도록 스캐닝 미러 입력에서 0 볼트의 전압을 넣어 중요합니다. 조심스럽게 수직으로 광선을 직접하기 위해 미러 각도를 조정하고, 부드럽게 위치에 미러를 조입니다.
- 우리가 똑바로 현미경을 만드는, 우리는 지금 90도 장착 브래킷을 사용하여 90도 각도로 두 번째 브레드 보드를 장착합니다. 해제하십시오레이저 스캐닝 전자, 섬유를 분리하고,이 과정에서 스캐닝 거울을 분리합니다. 괄호가 자리에 뛰쳐되면, 쉽게 정렬의 나머지 부분을 수행하려면, 조심스럽게 새로운 브레드 보드 지금 드러 누어되도록 전체 현미경을 돌린다. 작업 표면에 브레드 보드를 해결하기 위해 클램프를 사용합니다. 이제 이전의 수직 설치의 나머지 부분은 쉽게 플랫 브레드 보드에서 수행하실 수 있습니다.
3. 스캔, 튜브, 그리고 객관적인 렌즈를 설정
다음 우리는 공식적으로 "스캔 렌즈"와 "튜브 렌즈"라 불리는 릴레이 렌즈의 두 번째 집합을 설정합니다. 객관적인 초점에 올바른 배율을 달성하고 최종 이미지 해상도를 최적화할 수 있도록 같이 렌즈의 오른쪽 조합을 선택하는 것이 중요합니다. 첫째, 특정 목적 렌즈의 최대 조리개 수치 (NA)를 달성, 목표의 다시 인상적인 레이저 빔을 작성해야합니다다시 조리개를 완전히;만을 목적 렌즈는 소감 초점을 만들 수있을 것입니다. 객관적인 렌즈 다시 조리개 크기의 범위를 가지고, 약간 선택한 목표의 뒷면 조리개를 너무 많이 넣다하는 렌즈 배율 비율을 선택했습니다. 둘째, 오른쪽 배율을 달성하기 위해서는, 대상이 렌즈는 그것이 설계되었습니다있는 튜브 렌즈 초점 거리와 일치해야합니다. 불행히도, 다른 현미경 목표 제조 업체는 다른 튜브 렌즈 초점 길이를 사용하도록 선택한, 그래서 고용 특정 목적 렌즈에 대한 올바른 튜브 렌즈와 현미경을 구축하는 것이 중요합니다. 또한, 같은 자이스 혈구와 같은 특정 제조 업체, 부적 절한 목적 - 튜브 렌즈 한쌍을 사용하면 실제로 달리 없을 것입니다 새로운 aberrations을 소개합니다 그러한 그들의 유사한 목표의 구체적인 반음계 aberrations, 보상하기 위해 튜브 렌즈를 설계. 모든 색채 보상 일에 수행으로 우리는 일반적으로, 올림푸스 목표를 선호전자 목적 자체는, 쉽게 페어링 목적 / 튜브 렌즈를 제작. 객관적이고 튜브 렌즈가 일치하지 않는 경우 현미경 여전히 작동하지만, 실제 현미경의 배율은 가능성이 객관적인 렌즈에 나와있는 배율과 일치하지 않습니다. 이 특정 현미경 건설은 최적의 뒷면 조리개 크기는 스캔 렌즈와 튜브 렌즈 사이 1시 4분 확대 비율을 필요로하는, 4mm로 결정했다. 이 사용자 정의 현미경 빌드 위해, 우리는 75mm의 스캔 렌즈 길이 300 mm의 튜브 렌즈 길이를 사용합니다.
- 두 번째 스캔 미러와 객관적인 초점 사이의 전체 거리는 대형이기 때문에, 현미경이 구간 건설 첫번째 레이아웃 목적 렌즈에 광선을 조종하는 데 필요한 거울 것입니다. 첫 번째 대형 2 "(50mm) 가까이 브레드 보드의 가장자리에 직경 거울을, 장소 및 레이저 빔을 약 90도를 반영하는 거울 마운트를 회전. 대략 같은 세로 비를 유지하기 위해 거울을 해제 반사를 조정m 높이. 90도 각도로 아래로 빔을 안내 오리 엔테이션에서 브레드 보드의 반대편 가장자리에 다른 2 "거울을 배치합니다. 광선의 수직 높이가 변경되지 않도록 조정 나사를 사용합니다. 단계 1.4에서와 같이 두 붓꽃을 설정하고 창포의 빔 중심으로 단계 1.5 감독의 두 거울을 조정합니다.
- 첫 번째 홍채에 레이저 자리를 여전히 제자리에 창포와 빔 경로에 스캔 렌즈를 장소와 센터는 수평 및 수직 위치를 조정합니다. 75mm의 거리 + 렌즈 (두 개의 거울 사이)에서 300mm, 잘 큰 2 "튜브 렌즈를 배치하고 첫 번째 홍채 중심 광선을하기 위해 수평 및 수직 위치를 조정에서. 미래의 정렬을 유지하는 목적으로, 그 자리에서 이러한 붓꽃을 떠날 때 유용합니다,이 응용 프로그램에 대해, 적절한 규모의 구멍이있는 명함은 서서 붙어있을 수 있으며 빔 경로에 삽입.
- 모든 거울과 렌즈지금 장소에서, 공진 갈보 거울과 표준 스캔 미러를 스캔 시작합니다. 이 빌드에서, 표준 스캐닝 미러는 궁극적으로 같은 그림 3에서 설명한 것과 맞춤식 제어 회로를 통해 공진 거울의 스캔 속도로 동기화됩니다;이 뛰어난 수직 및 수평 동기화를 제공합니다. 그러나, 정렬 목적과 다양한 이미징 어플 리케이션을 위해, 거울을 쉽게 함수 발생기에서 sawtooth 패턴을 사용하여 스캔 수 있습니다. 비즈니스 카드를 사용하여 튜브 렌즈 뒤에 위치 300mm에서 레이저 광선을 찾습니다. 광선은 수직과 수평 방향 모두에서 현미경에 다른 스캔지만, 빔이 위치 근처에 완벽하게 고정되어야합니다. 이것은 객관적인 렌즈의 조리개가 다시 배치됩니다 곳입니다. 수평 및 수직 고정 비행기 빔 경로를 따라 같은 비행기에 일치하지 않는 경우, 신중하게 그것을 보장하기 위해 광학 경로를 따라 unclamp와 튜브 렌즈를 번역두 비행기는 가능 한한 가깝게 중복됩니다. 다시 중심 수직 및 수평 튜브 렌즈의 위치와 입장에 안전하게 고정.
- 다시 개구 가능한 정지 비행기에 가까운 목적 렌즈 위치를 확인하고, 빔 경로에 객관적인 렌즈를 삽입합니다. 진정한 목표의 뒤로 조리개는 실제로 항상 다양한 제조 업체의 디자인 선택에 의한 목적의 물리적 다시 오프닝에 위치한되지 않을 수 있습니다. 항상 최선 따라서 진정한 뒤로 조리개 위치를 확인하려면 제조 업체에 확인됩니다.
- Z - 축 모션에 대한 수의 번역 마운트는 객관적인 렌즈 마운트로 실행하지 않고 자사의 전체 범위에서 이동할 수 있는지 확인하고, 샘플 단계를 설정합니다.
4. 설정하고 공촛점 핀홀과 검출기를 정렬
- 모든 전원 공급 장치 및 광섬유의 연결을 해제하고 다시 reso를 가지고있는 브레드 보드에 달려있는 현미경 어셈블리가 같은 회전nant 스캐닝 미러. 모두 galvos 및 제어 케이블 위치에 안전하게 브레드 보드를 고정 후 콜리 메 이터에 광섬유를 다시 연결하고 다시 연결합니다. 이전처럼, 제어 전압에 장소 0 볼트는 표준 스캔 갈보 운전.
- 샘플 단계에서 두 coverslips 사이에 끼워 넣으면 명함이나 목적에 초점 밝은 염료의 작은 볼륨을, 장소. 염료의 선택은 선택한 레이저와 이색성에 따라 달라집니다,이 경우 우리는 공촛점 탐지 시스템을 정렬하기 위해 흰색 명함에서 형광 방출을 사용합니다. 그들이 밝은하고 photobleach하지 않는 양자 점들은 또한 정렬 목적으로 유용할 수 있습니다. 다른 대안은 밝은 형광 둘 다 색상 / 세탁 brightener에 노출 형광 구슬 및 / 또는 직물 샘플을 포함합니다. 레이저 소스의 전원을 켜고 번역 단계를 사용하여 현미경 초점에 샘플을 가져와. 일단 초점, 샘플에서 발생하는 형광이 t 뒤에 표시되어야합니다로 다음 단계에서 설명하는 그는 이색성 거울. 최대한 밝은 형광을 할 수있는 레이저 파워를 극대화할 수 있습니다.
- 비즈니스 카드를 사용하여 이색성 거울에 검색 시스템을 통해 객관적인 렌즈와 다시 통해 샘플의 형광 방출을 추적. 레이저 광선을 반영하면서 이색성 거울은 형광 방출을 전송할 것이다; 이색성 거울의 반대편이 형광 신호를 찾으십시오. 이제 이색성 거울 뒤에 거울을 배치하고 90도 각도로 방출을 반영하기 위해 그것을 사용합니다. 단계 1.1 완료되면서, 꽃창포을 가지고, 가능한 한 직선과 브레드 보드에 병렬로 형광 광선을 직접하기 위해 거울을 함께 사용합니다. 이 단계는 가장 희미한 불빛에서 실시있을 수 있습니다.
- 같은 그림 2에 설명되어있는 공촛점 핀홀 단위를 설정합니다. 우리는 ThorLabs에서 공간적 필터 케이지 마운트 어셈블리가이 작업에 이상적입니다 것으로 나타났습니다. 적절한 pinhol을 선택하는 것이 중요하다전자 크기는 공촛점 시스템이 너무 많이 신호를 희생없이 최적의 해상도에 도달하도록합니다. 이 사용자 정의 현미경을 위해, 100 μm의의 핀홀 크기가 선정되었습니다. 형광 방출 빔 중심을 가장 먼저 초점 렌즈 마운트를 돌보는, 형광 빔 경로에 맞춰 공간 필터 장치를 놓습니다. 명확한 초점 핀홀 표면 관찰 수있을 때까지 장치 (현미경 목표도 사용할 수 있습니다)에서 짧은 초점 거리의 렌즈를 장착 후, Z - 변환 마운트를 슬라이드. 전체 장치가 형광 광선에 의해 설정된 정확한 직선을 따라 중심 있는지 확인하십시오. 브레드 보드에 장치를 고정.
대부분의 샘플에서 방출도 어두운 방에서 주변 조명 수준에 비해 약합니다. 그것은 적절한 차폐 / 표시등이 이해할 수없는 문제인 길잃은 가벼운 오염으로부터 보호하기 위해 방출 경로를 함께 사용할 것을 따라서 중요합니다. 또한, 높은 주변 조명 수준은 특히 과부하 손상 많은 PMTs, 아니 C 가진 사람이됩니다urrent 보호. 여기 시연 것과 같은 적절하게 차폐 시스템없이 길잃은 가벼운 오염으로 거의 방 조명에 작업이 가능합니다, 독자 따라서 강력하게 방출 빔 경로를 묶으하는 렌즈 튜브를 사용하도록 촉구하고 있습니다. - 이제 번역 무대에서 조정 손잡이를 사용하여 체계적으로 핀홀을 통해 형광 신호가 극대화되는 지점을 찾을 수 공촛점 핀홀 이동합니다. 이 위치는 가장 쉽게 핀홀 마운트 표면을 통해 2D 검색을 수행하는 두 개의 축 조정을 반복을 통해 식별됩니다. 신호 극대화 위치가 발견되면 핀홀 후 케이지 마운트에 collimating 렌즈를 놓으십시오. 비즈니스 카드를 사용하여 공촛점 단위 통해 이뤄지는 형광 방출을 찾아 배출 형광 신호가 가능한 collimated 때까지 게시물 따라 collimating 렌즈를 슬라이드. 빔이 collimated되면 렌즈 욕조에 빔 경로에 해당 필터를 배치해야E.
- photomultiplier 튜브 (PMT) 어셈블리를 설정합니다. 형광 방출 빔 경로에 50mm 초점 거리 렌즈를 놓고 명함를 사용하여 초점을 찾으십시오. 브레드 보드에이 위치를 표시합니다. 이제 완전히 레이저를 해제 - 이것이 중요하다, 탈선 또는 unattenuated 레이저 빛이 영구적으로 대부분의 PMTs를 손상시킬 수 있으므로. 의 활성 영역은 가능한 한 표시된 초점 가까운 위치 있도록 PMT를 놓습니다. 조정 렌즈 튜브를 사용하여 초점 렌즈에 대한 PMT 어셈블리를 연결하고 신중하게 핀홀 다음과 같은 모든 노출 빔 경로 주변의 어두운 테이프를 포장.
- 레이저를 켜고 있지만, 형광 방출은 거의 볼 수 있습니다 이러한 매우 낮은 전력으로 유지하시기 바랍니다. 제어 전압이 증가로 신중하게 오실로 스코프에 미치는 전압을 읽기, PMT를 켭니다. PMT는 전자 곱한 단계의 시리즈를 통해 신호를 생성하며 photocurrent는 입사 광 레벨이 너무 높으면, 튜브가 수현재 제한 회로 레스터 손상. PMTs 따라서 매우 특히 전에 이러한 탐지기로 근무 한 적이없는 사용자를 위해 권장됩니다.
스파이크와 같은 판독 및 / 또는 DC 오프셋이 오실로 스코프 화면에서 볼 수있을 때까지 PMT 제어 전압을 증가, 대부분의 PMTs 들어,이 신호는지면에 부정적인 상대 것입니다. 이 신호는 실제로 신호의 손실을 관찰하기 위해 레이저 전원을 해제하여 형광에서 발생하는지 확인합니다. - 마지막으로, iteratively 먼저 초점 렌즈 Z 위치를 조작하고, 다음 yz 번역 단계를 조정하여 오실로 스코프에 대한 최대 신호 핀홀을 맞춥니다.
- 동영상 속도 현미경 하드웨어가 완료되었습니다! 지금과 같은 그림 3 diagrammed 거울, 사용자 지정 컨트롤 보드와 컴퓨터를 연결. 위와 같이, 그것은 먼저 현미경의 최적의 해상도를 찾을 알려진 크기의 표준을 시각화하고 픽셀을 계산하는 이미징 시스템을 사용하는 것이 좋습니다- 투 - 해상도 이미징 시스템 상수. 같은 잘 알려진 문자 크기, 형광 또는 반사 공군 목표 및 형광 microspheres 흰 명함으로 사용할 수있는 크기의 기준이 있습니다.
5. 공촛점 스캔 microendoscopy위한 시스템 준비
이 우리가 섬유 코어의 많은 수천의 묶음으로 구성되어 있습니다 일관된 이미지 섬유를 사용하는 건설, 이러한 배열은 이미지가 섬유 쉽게 복원 및 / 또는 다른 쪽 끝을 (그림 4)에서 확장을 통해 전달 수 있습니다. 이 내시경의 건설에 사용되는 코히어런트 광섬유 번들 그것은 소위 "접촉 모드"microendoscope 만들기, 양쪽 끝에 광택입니다. microendoscope 팁이 오브젝트와 긴밀한 접촉을 가져온 경우 포커스에있는 이미지는 따라서에만 형성됩니다. 이 의사 공촛점 배열에서 현미경의 스캐닝 작업을 한 F에 레이저를 초점을 맞춘한 번에 iber 코어, 공촛점 핀홀이 주변 섬유부터 밖에서 초점 빛이 검출기에 통과 허용하지 않습니다 보장하면서. 다양한 이미징 어플 리케이션을 위해, 렌즈의 집합은 전진 방향, 장거리 형광 이미징 수 있도록 말초 끝에 추가할 수 있습니다. Microoptic 렌즈뿐만 아니라, 기울기의 굴절률 (미소) 렌즈는 쉽게 사용하기 위해 적응 수 있으며, 광학 품질 glues를 사용하여 말초 섬유 팁에 부착된하실 수 있습니다.
- microendoscopy위한 이미징 시스템을 설정하려면, 조심스럽게 샘플 단계를 제거하고 섬유 지주 단계 (그림 5)로 바꾸십시오. 그 형광 방출이 균일하게 섬유 코어의 모든 걸쳐 생성하므로 염료의 약한 솔루션 섬유 번들의 물놀이 한쪽 끝을. 검색 시스템의 전원을 켜고 초점 섬유 번들 (근위 끝, 또는 현미경의 광학에 가까운 끝)의 다른 쪽 끝을 가져 광섬유 홀더를 조정합니다. 첫째, 번역 조정 SCR을 사용하여스캔 분야에서 센터로 엔지니어링 워크 스테이션은 섬유. 스캔하는 동안, 근위 섬유 팁에서 형광 방출 이미지를보세요. 전체 microendoscope 표면은 목표의 초점 평면에있을 때, 모든 섬유 코어 전체의 형광 방출 가능한 한 균일됩니다. 모든 섬유 코어는 균일하게 밝은 확인하기 위해 섬유 얼굴을 조정 각도 조절 손잡이를 사용하십시오. 이 조정 기간 동안, 그것은 가능성이 다시 조정 번역 위치로 스캔 필드에 다시 센터 섬유에 필요합니다. 전체 섬유 팁 초점이 제대로 될 때까지 이러한 조정을 통해 반복.
- microendoscope를 사용하기 전에, 약간 부드럽게 HPLC 급 메탄올로 침수 렌즈 청소 종이를 사용하여 말초 팁을 청소하십시오. 이전처럼, microendoscope 이미징 시스템의 해상도를 측정하고 계산하는 알려진 크기의 표준을 사용합니다.
6. 대표 결과 :
그림 6은 완료 upr의 예제를 보여줍니다항공 공촛점 스캐닝 현미경 microendoscopy을 위해 구성되었습니다. 레이저 빔을 방출이 눈에 가이드로 그려왔다. 섬유 마운트 microendoscopy 작업 중 위치에 이미지 섬유를 보유하고 있습니다. 이 섬유는 쉽게 마운트 직립 현미경 플랫폼으로 사용할 수있는 XY 또는 XYZ 번역 단계로 교체할 수 있습니다. ThorLabs 부품 PT3 (XYZ 번역) 또는 두 ThorLabs 부분 AP90 같은 오른쪽 앵글 브래킷과 함께,이 응용 프로그램에 대해 잘 PT1 단계 (XY 번역) 작업을 했답니다.
동영상 속도 framegrabber 카드는 수신 신호로부터 이미지를 생성하는 데 사용됩니다. 그림 7은 비디오 속도 현미경 스캐닝 시스템을 사용하여 흰색 명함에 인쇄된 "M"소문자 찍은 대표적인 테스트 이미지를 보여줍니다. 표백 백서 어두운 편지 "M"뒤에 밝은 배경으로 인해, 자외선과 청색 광에 의해 흥분 fluorophores가 포함되어 있습니다. 515 nm의 중심 방출 필터는이 형광 방출을 수집하기 위해 선정되었습니다. m이미지의 inor 왜곡은 특히 이미지 프레임의 측면 가장자리 근처에 볼 수 있습니다. sinusoidal 검사 8kHz gavlo 미러의 패턴과에서이 왜곡 결과는 아래에 자세히 설명됩니다.

그림 1. 공촛점 현미경의 운영 원칙을 보여주는 다이어그램. 객관적인 초점에서 발생하는 광선은 시스템을 통해 다시 릴레이와 공촛점 핀홀 (빨간색)를 통해 초점을 맞추고 있습니다. 중 위 (파란색) 또는 아래 (녹색) 목표의 초점 collimated 목표에서 등장하지 않으며, 따라서 원래 광선을 효과적으로 공촛점 핀홀을 통해 전송되지 않습니다.

그림 2. 빔 스캐닝 시스템을 통해 모든 빛을 경로를 보여주는 다이어그램. 검색 거울은 역 함께 telecentric 비행기에 앉아tionary, 객관적 뒤로 조리개 비행기. 정지 비행기 사이에 렌즈의 쌍으로 릴레이 스캔 빔을 위해 행동. 처음 두 릴레이 렌즈는 1:1 망원경을 형성, 동일 초점 길이 있습니다. 스캔 렌즈와 튜브 렌즈로 공식적으로 알려진 렌즈의 두 번째 쌍이, 초점 거리에있어 동등해야하고, 자주 백업 조리개가 overfilled있는 목표를 위해 광선 확대 망원경 역할을하지 않습니다. 샘플에서 배출 불빛이 스캔 시스템을 통해 다시 여행하고 이색성 거울을 통해 전달됩니다. 짧은 초점 렌즈는 렌즈에 의해 다음 collimated있는 공촛점 핀홀을 통해 방출 빛을 초점을 맞추고 있습니다. 최종 렌즈 photomultiplier 튜브에 공촛점 필터링 방출을 초점을 맞추고 있습니다. 이 이미지의 전체 크기 버전을 보려면 여기를 클릭하십시오.

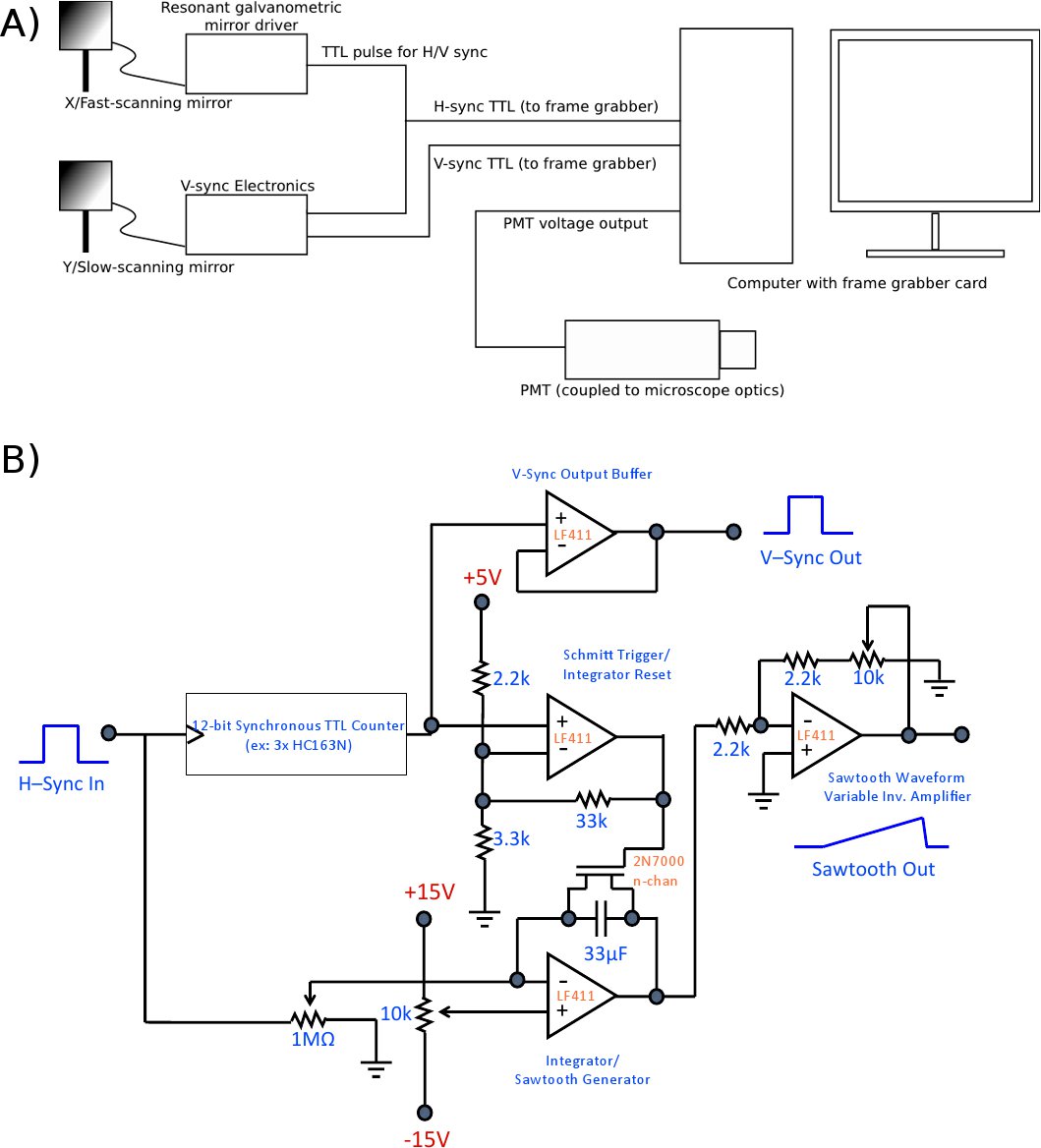
 그림 3. 스캐닝 전자 설정의 (A) 개요 다이어그램. 현미경의 전체 레퍼런스 신호와 timebase가 (갈보가 검색 사이클을 완료 예) 스캔 각 라인의 끝에 TTL 펄스를 생성 빠른 축 공진 갈보 거울의 "동기화"TTL 출력됩니다. 이것은 framegrabber 카드 H - 동기화 신호를 제공합니다. 갈보의 동기화 출력도 점차적으로 속도가 느린 스캔 축을 드라이브 sawtooth 파형을 생성하는 각 H - 동기화 펄스에 대한 응답의 출력 전압을 증가 V - 동기화 제어 보드에 연결되어 있습니다. 일단 모든 라인이 스캔되어 있고, V - 동기화 보드 리셋 sawtooth 파형 및 framegrabber의 V 동기화 신호 역할을하는 TTL 펄스를 생성합니다. framegrabber 카드에 최종 입력은 photomultiplier 튜브 (많은 PMTs은 부정적인 출력 전압을 생성합니다에서 아날로그 신호이며 귀하의 회로를 설계해야D) 따라 하드웨어를 선택합니다. 동영상 속도 이미지는 생성에서 Matrox의 framegrabber 소프트웨어에 표시됩니다. (B) 예 제어 회로. 이 디자인에서는, 각 H - 동기화 펄스의 전압은 "추가"입니다 / sawtooth 파형 램프를 생성하는 조합의 앰프 통합에 통합, 펄스는 concomitantly TTL 카운터 단계에서 계산됩니다. 라인의 원하는 번호 (래스터 스캔이 완료되면 즉,)에 도달하면 카운터가 활성 - 낮은 통합을위한 리셋 펄스를 생성하는 슈미트 트리거를 드라이브 펄스를, "수행"생성합니다. 이 리셋 카운터와 조합의 앰프 통합 모두 다음주기위한 회로를 readying. 해당 구성 요소의 선택은 래스터 크기의 다양한 회로가 널리 적용합니다. 이것은 하나의 구현이며 여러 다른 구현이 가능하고 특정 상황에 따라 선호 수 있습니다. 또한이 회로에서 Matrox의 framegrabber 카드와 함께 사용할 수 있도록 설계되었습니다감지하고 자동으로 이미지 위상을 수정의. 회로가 다른 framegrabbers와 함께 사용할 수있다면, 위상 보정 회로 또는 소프트웨어가 필요할 수 있습니다. 이 이미지의 전체 크기 버전을 보려면 여기를 클릭하십시오.
그림 3. 스캐닝 전자 설정의 (A) 개요 다이어그램. 현미경의 전체 레퍼런스 신호와 timebase가 (갈보가 검색 사이클을 완료 예) 스캔 각 라인의 끝에 TTL 펄스를 생성 빠른 축 공진 갈보 거울의 "동기화"TTL 출력됩니다. 이것은 framegrabber 카드 H - 동기화 신호를 제공합니다. 갈보의 동기화 출력도 점차적으로 속도가 느린 스캔 축을 드라이브 sawtooth 파형을 생성하는 각 H - 동기화 펄스에 대한 응답의 출력 전압을 증가 V - 동기화 제어 보드에 연결되어 있습니다. 일단 모든 라인이 스캔되어 있고, V - 동기화 보드 리셋 sawtooth 파형 및 framegrabber의 V 동기화 신호 역할을하는 TTL 펄스를 생성합니다. framegrabber 카드에 최종 입력은 photomultiplier 튜브 (많은 PMTs은 부정적인 출력 전압을 생성합니다에서 아날로그 신호이며 귀하의 회로를 설계해야D) 따라 하드웨어를 선택합니다. 동영상 속도 이미지는 생성에서 Matrox의 framegrabber 소프트웨어에 표시됩니다. (B) 예 제어 회로. 이 디자인에서는, 각 H - 동기화 펄스의 전압은 "추가"입니다 / sawtooth 파형 램프를 생성하는 조합의 앰프 통합에 통합, 펄스는 concomitantly TTL 카운터 단계에서 계산됩니다. 라인의 원하는 번호 (래스터 스캔이 완료되면 즉,)에 도달하면 카운터가 활성 - 낮은 통합을위한 리셋 펄스를 생성하는 슈미트 트리거를 드라이브 펄스를, "수행"생성합니다. 이 리셋 카운터와 조합의 앰프 통합 모두 다음주기위한 회로를 readying. 해당 구성 요소의 선택은 래스터 크기의 다양한 회로가 널리 적용합니다. 이것은 하나의 구현이며 여러 다른 구현이 가능하고 특정 상황에 따라 선호 수 있습니다. 또한이 회로에서 Matrox의 framegrabber 카드와 함께 사용할 수 있도록 설계되었습니다감지하고 자동으로 이미지 위상을 수정의. 회로가 다른 framegrabbers와 함께 사용할 수있다면, 위상 보정 회로 또는 소프트웨어가 필요할 수 있습니다. 이 이미지의 전체 크기 버전을 보려면 여기를 클릭하십시오.

코히어런트 광섬유 번들을 통해 그림 4. 이미지 전송. 이 도식에서 번들의 양쪽에있는 렌즈는 광섬유 번들 입력뿐만 아니라 광섬유 번들 출력 이미지를 확대에 투영 모두 이미지를 규모 곳에 있습니다.

그림 5. 5 축 마운트에 마운트 섬유 번들의 예. 작은 1 "직경 알루미늄 블록은 이미지 섬유 번들이 삽입 될 수 있도록 지루했습니다. 섬유 봇의 알루미늄 블록 내부 epoxied되었습니다안정성을위한 블록의 H는 상단과 하단.

그림 6. 연결된 microendoscope와 함께 완성된 현미경 시스템의 이미지. 이색성 거울 후 방출 빔 경로가 빨간색 라인으로 그려진 상태에서 더 빛을 경로를 시각화하려면 여기 빔 경로는 파란색으로 그려진 것입니다.

그림 7. 비디오 속도 공촛점 스캐닝 현미경 시스템에 의해 생성된 예제 이미지. 어두운 소문자 편지 "M"은 흰색 명함의 밝은 형광 배경에 나타납니다.
Discussion
이 비디오 속도 이미징 시스템은 약 8 kHz에서에서 공진 갈바 노 미러 작동을 사용합니다. 최대 전력으로 실행하면 공진 거울은 아주 크게 될 수 있으며, 높은 피치는 충분한 노출 시간 귀찮은 심지어 위험할 수 있습니다. 여기 증명하지지만, 그것은 상당히 시스템 볼륨 및 / 또는 귀마개 적절한 청력 보호 장비를 착용을 줄이기 위해 투명 케이스 내부의 공진 갈바 노 미러를 방어막을 권장합니다.
공진 갈바 노 미러는 sinusoidal 패턴에서 검색합니다. 그러나, framegrabber 카드 신호가 수평 및 수직 방향 모두에서 완전히 선형 스위프 속도를 가정에 참조하십시오. sinusoidal 청소는 검사의 가장자리에 속도가 느려집니다 때문에, 이미지 압축 아티팩트가 빠른 (가로) 이미지 축을 따라 볼 수 있습니다. 이 문제를 최소화하기 위해 한 가지 방법은 의도적으로 공진 갈보 미러 스캔 범위를 드라이브보다 훨씬 큰릴레이 렌즈 직경. 이렇게에서 sinusoidal 스캔 패턴은 거의 선형 스위프 중앙 이미지 왜곡을 최소화, 샘플을 트래버스합니다. 또 다른 방법은 빠른 축을 linearize에 게시 프로세스 이미지 수집하는 것입니다. 이것은 이미지로 알려진 형광 패턴 (예 : 격자 등) 완성하고 수집된 이미지를 unwarps 처리 스크립트를 만들 수있는 알려진 패턴 크기를 사용하실 수 있습니다.
이 특정 스캔 시스템은 종종 수직 지향 비디오 속도 현미경을 필요로 생체내 이미징에의 목적을 위해 설계되었습니다. 세포 이미징 실험을 위해, 거꾸로 현미경 더 일반적으로 사용됩니다. 여기에 제시 디자인은 쉽게 그러한 거꾸로 현미경을 구축하기 위해 변경할 수 있으며 필요하다는 것을 모두가 마지막 2 "직경 미러의 회전이다. 대신 아래 스캔 광선을 직접하기 위해 거울을 orienting의 거울 위쪽으로 광선을 직접하실 수 있습니다. 목적 렌즈 배치t 샘플 무대와 함께 미러에서 동일한 거리는 반전 도형에 이미지를 허용합니다. 이미징 시스템 microendoscopic 이미징에 대해 전적으로 건설하는 경우, 전혀 수직 현미경의 디자인을 "접는"이유가 없습니다. 대신, 전체 검사 시스템은 광학 테이블에 객관적인 렌즈 지향 병렬로 단일 수평 브레드 보드에 만들 수 있습니다.
이것은 대부분의 상용 공촛점 현미경에서 찾을 수로보다 다양한 시스템을 desiring 사용자가 변수 핀홀를 통합하는 것이 좋습니다, 그 위대한 빌드 단순과 정렬의 편의를 위해 제공하고 있지만,이 빌드의 현미경은 고정 핀홀 구성을 사용합니다. 사용자가 방출 강도 변화의 샘플을 보완할 수있는 핀홀의 크기를 조정할 수 있도록함으로써, 이것은 사용자가 더 주어진 샘플에 대한 신호 강도와 해결 사이의 거래와를 최적화 할 수 있습니다.
채널현미경에 대해 선택한 이미지 섬유 oice은 중요하다. 우리가 그들의 가까운 섬유 코어 간격과 낮은 상대 autofluorescence로 인해 스미토모 일관된 이미지 섬유를 사용하는 것이 좋습니다. Fujikura 제조한 이미지 섬유 샘플에서 약한 형광 신호를 압도하고 microendoscope의 궁극적인 감도를 제한할 수 있습니다 autofluorescence 10 높은 금액을 가지고 발견되었습니다. 이와 특별한 설정에 사용되는 8 - 30N으로 스미토모 제조 섬유, 자신의 Fujikura 등가물보다 훨씬 낮은 수준 autofluorescence 있습니다. leeched 섬유 번들이 microendoscopy에 대한 매력적인 것으로 간주 수도 있지만, 그들의 디자인은 일반적으로 섬유 코어 띄엄띄엄 샘플 개체, 잠재적인 이익의 상당 지역을 떠나는 것을 의미합니다 너무 멀리 떨어져 각각의 광섬유 코어를 배치합니다.
마지막으로, 그것은 현미경 여기서 설명하는 동안 체외 및 생체내 applicati의 다양한 유용하게 사용될 수 있다고 지적한다기능하며 완벽한 기능을 갖춘 상용 시스템의 비용의 일부에 대해 만들 수 있습니다, 그것은 전송 빛 감지, 볼 접안 렌즈, 또는 비 공촛점 widefield epifluorescence에 대한 빔 경로 같은 기능을 가지고 있지 않습니다. 그것이 처음부터 이러한 기능을 가진 시스템을 구축 할 수 있지만, 그러한 시스템을 desiring 독자들의 요구를 충족보다는 완전히 새로운 빌드 시작하는 기존의 상용 시스템을 수정하실 수 있습니다.
Disclosures
이 비디오이 비디오 생산은 Thorlabs 주식 회사가 후원했습니다
Acknowledgments
저자는이 프로젝트의 지원 ThorLabs 감사하고 싶습니다. AJN은 NSF 대학원 원정대의 지원을 인정하고자합니다.
이 작품은 부분적으로 NIH 원장의 새로운 혁신 보너스 프로그램을 통해 국립 보건원, OD007096 - 01 DP2 부여 번호 1 후원했다. 새로운 혁신 보너스 프로그램에 대한 정보는에 있습니다 http://nihroadmap.nih.gov/newinnovator/ . 저자는 하버드 전자 연구실 사용에 대한 톰 헤이스 감사하고 싶습니다.
Materials
| Name | Company | Catalog Number | Comments |
| 515 nm Band Pass Filter | Chroma Technology Corp. | HQ515/50M | 46 FWHM |
| Achromatic Doublet Lens 25.4mm Dia. x 50mm FL, MgF2 Coating | Edmund Scientific | NT49-766 | |
| Achromatic Doublet Lens 25.4mm Dia. x 76.2mm FL, MgF2 Coating | Edmund Scientific | NT49-768 | |
| Achromatic Doublet Lens 25.4mm Dia. x 88.9mm FL, MgF2 Coating | Edmund Scientific | NT49-769 | |
| Achromatic Doublet Lens 50mm Dia. x 300mm FL, MgF2 Coating | Edmund Scientific | NT45-179 | |
| 8 kHz R High Frequency Optical Scanner | Electro-Optical Products Corporation (EOPC) | SC-30 | 8 kHz |
| AGC Driver | Electro-Optical Products Corporation (EOPC) | ACG:8K | |
| H7422-PA Photosensor Module | Hamamatsu Corp. | H7422-PA | Current limiting recommended |
| M9012 Power Supply | Hamamatsu Corp. | M9012 | For use with H7422-PA |
| HC PL APO CS Objective | Leica Microsystems | 11506284 | 10x/0.40 |
| Solios eA/XA Framegrabber Card | Matrox | Solios eA/XA | MIL software required; –M interconnects recommended |
| 12V Power Supply | Meanwell | LPV-100-12 | +12V, 8.5A |
| 5x Microscope Objective Lens | Newport Corp. | M-5X | 0.10 NA, 25.4 mm Focal Length |
| Coherent Image Fiber | Sumitomo Bakelite Co., Ltd. | 8-30N | |
| 1/4"-20 Cap Screw and Hardware Kit | Thorlabs Inc. | HW-KIT2 | |
| 100 μm Mounted Pinhole | Thorlabs Inc. | P100S | Ideal for building spatial filters |
| 30 mm Cage Cube Clamp | Thorlabs Inc. | B6C | |
| 30 mm Cage System Cube, 4-Way | Thorlabs Inc. | C4W | |
| 406 nm, 5 mW, B Pin Code, SM Fiber Pigtailed Laser Diode, FC/PC | Thorlabs Inc. | LPS-406-FC | Product obsolete; replaced by LP405-SF10 |
| 5-Minute Epoxy, 1 Ounce | Thorlabs Inc. | G14250 | |
| 6 Axis Kinematic Optic Mount | Thorlabs Inc. | K6X | |
| 8-32 Cap Screw and Hardware Kit | Thorlabs Inc. | HW-KIT1 | |
| 8-32 Setscrew and Hardware Kit | Thorlabs Inc. | HW-KIT3 | |
| Adapter with External RMS Threads and Internal SM1 Threads | Thorlabs Inc. | SM1A4 | |
| Adj. FC/PC and FC/APC Collimator, f = 2.0 mm, ARC: 400-600 nm | Thorlabs Inc. | CFC-2X-A | f = 2.0 mm |
| Adjustable Fiber Collimator Adapter, SM1 Threaded | Thorlabs Inc. | AD9.5F | |
| Aluminum Breadboard, 12" x 18" x 1/2" | Thorlabs Inc. | MB1218 | 1/4"-20 Threaded |
| Benchtop Laser Diode/TEC Controller | Thorlabs Inc. | ITC4001 | 1 A/96 W |
| DMLP 425 nm Long-Pass Dichroic Mirror | Thorlabs Inc. | DMLP425 | |
| Kinematic Mount for 1" Optics | Thorlabs Inc. | KM100 | |
| LD/TEC Mount for ThorLabs Fiber-Pigtailed Laser Diodes | Thorlabs Inc. | LM9LP | |
| Lens Mount for 18 mm Optics | Thorlabs Inc. | LMR18 | One retaining ring included |
| Lens Mounts for 2" Optics | Thorlabs Inc. | LMR2S | With internal and external threading; retainer ring included |
| Mini Series Cage Assembly Rod, 6" Long, 4 mm, Qty. 1 | Thorlabs Inc. | SR6 | |
| 1.0" Pedestal Pillar Post, 8-32 Taps, 1" Long | Thorlabs Inc. | RS1P8E | |
| 1" Pillar Post Extension, Length=0.5 | Thorlabs Inc. | RS05 | |
| 1" Pillar Post Extension, Length=0.75" | Thorlabs Inc. | RS075 | |
| 1" Protected Silver Mirror, 3.2 mm Thick | Thorlabs Inc. | ME1-P01 | |
| 1" SM1 Rotating Adjustable Focusing Element, L = 1" | Thorlabs Inc. | SM1V10 | |
| 2" Protected Silver Mirror, 3.2 mm Thick | Thorlabs Inc. | ME2-P01 | |
| P100S - 100 μm Mounted Pinhole | Thorlabs Inc. | P100S | |
| Polaris Low Drift 1" Kinematic Mirror Mount | Thorlabs Inc. | POLARIS-K1 | Low drift |
| SM1 Lens Tube, L = 1" | Thorlabs Inc. | SM1L-10 | One retaining ring included |
| SM1 Threaded 30 mm Cage Plate, 0.35" Thick | Thorlabs Inc. | CP02 | |
| SM1 to M25 Optical Component Threading Adaptor | Thorlabs Inc. | SM1A24 | External SM1 Threads and Internal M25.5x0.5 Threads |
| Small Beam Diameter Galvo System | Thorlabs Inc. | GVSM001 | |
| Small Clamping Fork | Thorlabs Inc. | CF125 | 1/25" counterbored slot, universal |
| Spatial Filter System | Thorlabs Inc. | KT310 | Pinhole sold separately |
| TE-Cooled Mount for 5.6 & 9 mm Lasers | Thorlabs Inc. | TCLDM9 | |
| Vertical Bracket for Breadboards | Thorlabs Inc. | VB01 | Each |
| Plan-Apochromat | Carl Zeiss, Inc. | 1101-957 | 20x/0.75 NA |
References
- Pawley, J. B. Handbook of biological confocal microscopy. , Springer Verlag. 985-985 (2006).
- Lippincott-Schwartz, J., Snapp, E., Kenworthy, A.
- Klonis, N., Rug, M., Harper, I., Wickham, M., Cowman, A., Tilley, L. Fluorescence photobleaching analysis for the study of cellular dynamics. European Biophysics Journal. 31, 36-51 (2002).
- Stephens, D. J. Light Microscopy Techniques for Live Cell Imaging. Science. 300, 82-86 (2003).
- McMahon, A., Supatto, W., Fraser, S. E., Stathopoulos, A. Dynamic Analyses of Drosophila Gastrulation Provide Insights into Collective Cell Migration. Science. 322, 1546-1550 (2008).
- Wallingford, J. B. Dishevelled controls cell polarity during Xenopus gastrulation. Nature. 405, 81-85 (2000).
- Laemmel, E. Fibered Confocal Fluorescence Microscopy (Cell-viZio) Facilitates Extended Imaging in the Field of Microcirculation. Journal of Vascular Research. 41, 400-411 (2004).
- Moussata, D.
- Dunbar, K., Canto, M.
- Udovich, J. A. Spectral background and transmission characteristics of fiber optic imaging bundles. Applied optics. 47, 4560-4568 (2008).

{kind=link}
{kind=link}