

Summary
इस पांडुलिपि का वर्णन एक पूरी तरह से कंप्यूटर नियंत्रित प्रक्रिया है कि स्थिर और अस्थिर हवा एक छोटे पैमाने पर सुविधा में मजबूर द्वारा उत्साहित पानी तरंगों के प्रयोगों से विश्वसनीय सांख्यिकीय मापदंडों प्राप्त करने की अनुमति देता है ।
Abstract
इस पांडुलिपि एक प्रयोगात्मक प्रक्रिया है कि जल समय पर निर्भर है और स्थिर हवा मजबूर कर तरंगों के लौकिक और स्थानिक विकास पर विविध मात्रात्मक जानकारी प्राप्त करने की अनुमति देता है वर्णन करता है । समाई-प्रकार तरंग गेज और लेजर ढलान गेज (LSG) तात्कालिक पानी की सतह ऊंचाई और एक हवा की लहर सुविधा के परीक्षण अनुभाग के साथ स्थानों की एक संख्या में तात्कालिक सतह ढलान के दो घटकों को मापने के लिए उपयोग किया जाता है । कंप्यूटर नियंत्रित ब्लोअर टैंक में पानी के ऊपर airflow प्रदान करता है जिसकी दर समय में भिंन हो सकती है । वर्तमान प्रयोगों में, परीक्षण खंड में हवा की गति शुरू में आराम से सेट मूल्य को जल्दी से बढ़ जाती है । यह तो निर्धारित अवधि के लिए स्थिर रखा है; अंत में, airflow बंद है । प्रत्येक प्रयोगात्मक चलाने की शुरुआत में, पानी की सतह शांत है और वहां कोई हवा है । धौंकनी का संचालन एक साथ एक कंप्यूटर द्वारा सभी सेंसरों द्वारा उपलब्ध कराए गए डेटा के अधिग्रहण के साथ शुरू की है; जब तक टैंक में तरंगों पूरी तरह से क्षय डेटा अधिग्रहण जारी है । एकाधिक स्वतंत्र समान मजबूर शर्तों के तहत प्रदर्शन की अनुमति देता है सांख्यिकीय विश्वसनीय पहनावा-औसत विशेषता पैरामीटर है कि मात्रात्मक एक के रूप में प्रारंभिक विकास के चरण के लिए समय में हवा-तरंगों ' भिंनता का वर्णन का निर्धारण फ़ेच का कार्य । प्रक्रिया भी स्थिर हवा मजबूर के तहत लहर क्षेत्र के स्थानिक विकास निस्र्पक अनुमति देता है, साथ ही समय में तरंगों के क्षय, एक बार हवा बंद है, लाने के एक समारोह के रूप में ।
Introduction
प्राचीन काल से, यह अच्छी तरह से जाना जाता है कि पानी सतहों पर लहरों हवा से उत्साहित कर रहे हैं । इस प्रक्रिया को नियंत्रित करने वाले भौतिक तंत्र की वर्तमान समझ संतोषजनक से दूर है । कई हवा का वर्णन करने का प्रयास-लहर पीढ़ी के वर्षों1,2,3,4, लेकिन उनके विश्वसनीय प्रयोगात्मक सत्यापन अभी तक उपलब्ध नहीं है पर प्रस्तावित थे सिद्धांतों । समुद्र में यादृच्छिक हवा की माप-लहरों बेहद अप्रत्याशित हवा है कि जल्दी दिशा में और साथ ही परिमाण में भिंन हो सकते है के कारण चुनौतीपूर्ण हैं । प्रयोगशाला प्रयोगों नियंत्रणीय स्थितियों है कि लंबे समय तक और दोहराने माप सक्षम का लाभ है ।
प्रयोगशाला के वातावरण में स्थिर हवा के तहत, हवा-लहरों अंतरिक्ष में विकसित । स्थिर मजबूर कर दशकों पहले प्रदर्शन के तहत लहरों पर प्रारंभिक प्रयोगशाला प्रयोगों तात्कालिक सतह ऊंचाई माप5,6,7,8तक ही सीमित थे । हाल ही में अध्ययन भी विभिंन ऑप्टिकल तकनीक को तात्कालिक पानी की सतह झुकाव कोण जैसे LSG9,10के उपाय, कार्यरत हैं । उन माप हवा के तीन आयामी संरचना-लहर क्षेत्रों पर कुछ सीमित गुणात्मक जानकारी प्राप्त करने की अनुमति दी । जब मजबूर हवा अस्थिर है, के रूप में यह क्षेत्र प्रयोगों में है, अतिरिक्त जटिलता हवा से पानी लहरें ' उत्तेजना की समस्या के लिए शुरू की है, जिसके परिणामस्वरूप लहर क्षेत्र के सांख्यिकीय मापदंडों न सिर्फ अंतरिक्ष में बदलती है, लेकिन समय में के रूप में अच्छी तरह से । अब तक किया प्रयास लहर विकास पैटर्न का वर्णन करने के लिए गुणात्मक और मात्रात्मक समय के तहत निर्भर के तहत ही आंशिक रूप से सफल रहे थे11,12,13,14 , 15 , 16. विभिंन प्रशंसनीय भौतिक तंत्र के सापेक्ष योगदान है कि उत्तेजना और हवा कार्रवाई की वजह से तरंगों के विकास के लिए नेतृत्व कर सकते है मोटे तौर पर अज्ञात रहता है ।
हमारी प्रायोगिक सुविधा या तो स्थिर या अस्थिर हवा मजबूर के तहत हवा लहर क्षेत्र विशेषताओं की भिन्नता पर सटीक और विविध सांख्यिकीय जानकारी के संचय को सक्षम करने के उद्देश्य से बनाया गया था । दो प्रमुख कारकों इन विस्तृत अध्ययन ले जाने की सुविधा । सबसे पहले, सुविधा के समय और अंतरिक्ष में अपेक्षाकृत कम विशिष्ट विकास तराजू में परिणाम की मामूली आकार । दूसरा, पूरे प्रयोग पूरी तरह से एक कंप्यूटर द्वारा नियंत्रित किया जाता है, इस प्रकार प्रयोगात्मक रन के प्रदर्शन को सक्षम करने के लिए अलग प्रायोगिक शर्तों के तहत स्वचालित रूप से और व्यावहारिक रूप से मानवीय हस्तक्षेप के बिना । प्रयोगात्मक सेट अप की इन सुविधाओं को आवेगी हवा द्वारा आराम से उत्तेजित लहरों पर प्रयोगों प्रदर्शन में महत्वपूर्ण महत्व के हैं ।
हवा के स्थानिक विकास-तरंगों के तहत स्थिर मजबूर हवा वेग17की एक सीमा के लिए हमारी सुविधा में अध्ययन किया गया है । परिणाम के रूप में संयंत्र19द्वारा प्रस्तुत मील18 सिद्धांत के आधार पर विकास दर अनुमान के साथ तुलना में थे । तुलना से पता चला कि प्रयोगात्मक परिणाम सैद्धांतिक भविष्यवाणियों से विशेष रूप से अलग हैं । अतिरिक्त महत्वपूर्ण पैरामीटर भी17में प्राप्त किए गए थे, जैसे कि परीक्षण अनुभाग में मतलब दबाव ड्रॉप, साथ ही निरपेक्ष मूल्यों और विशेषता स्थिर दबाव उतार चढ़ाव के चरणों । हवा में कतरनी तनाव-पानी इंटरफेस हवा और लहरों के बीच17,19गति और ऊर्जा हस्तांतरण के लक्षण वर्णन के लिए आवश्यक है । इसलिए, लघुगणकीय सीमा परत की विस्तृत माप और पानी तरंगों के ऊपर हवा के प्रवाह में अशांत उतार चढ़ाव कई कौड़ी और हवा वेग20पर प्रदर्शन किया गया । इस अध्ययन में निर्धारित हवा-पानी के इंटरफेस में घर्षण वेग यू* के मूल्यों को हवा-लहरें हमारी सुविधा21में मापा के क्वांटिटी सांख्यिकीय मापदंडों को प्राप्त करने के लिए इस्तेमाल किया गया । ये मान बड़े प्रायोगिक प्रतिष्ठानों और क्षेत्र प्रयोगों में प्राप्त संगत क्वांटिटी पैरामीटर्स के साथ तुलना किए गए थे. यह पहले21 का प्रदर्शन किया है कि उचित स्केलिंग के साथ, हवा की महत्वपूर्ण विशेषताओं-लहर हमारे छोटे पैमाने पर सुविधा में प्राप्त क्षेत्र काफी बड़ी प्रयोगशाला में संचित इसी डेटा से अलग नहीं है प्रतिष्ठानों और खुले समुद्र माप । इन मापदंडों प्रतिनिधि लहर ऊंचाई और तरंग लंबाई, सतह ऊंचाई की आवृत्ति स्पेक्ट्रम के आकार, साथ ही उच्च सांख्यिकीय क्षणों के मूल्यों के स्थानिक विकास शामिल हैं ।
बाद में हमारी सुविधा22में किए गए अध्ययनों से पता चला,23 कि हवा लहरों मूलतः यादृच्छिक और तीन आयामी हैं । पवन तरंगों के 3 डी संरचना में एक बेहतर अंतर्दृष्टि पाने के लिए, एक प्रयास स्टीरियो वीडियो इमेजिंग22का उपयोग कर एक विस्तारित क्षेत्र पर मात्रात्मक समय पर निर्भर पानी की सतह ऊंचाई प्रदर्शन किया गया था । अपर्याप्त कंप्यूटर बिजली वर्तमान और प्रसंस्करण एल्गोरिदम पर उपलब्ध है कि अभी तक पर्याप्त रूप से प्रभावी नहीं है के कारण, इन प्रयासों को केवल आंशिक रूप से सफल साबित हुआ । हालांकि, यह प्रदर्शित किया गया था कि एक पारंपरिक समाई के संयुक्त उपयोग प्रकार वेव गेज और LSG पवन तरंगों के स्थानिक संरचना पर बहुमूल्य जानकारी प्रदान करता है । दोनों उन उपकरणों के एक साथ आवेदन तात्कालिक सतह ऊंचाई और तात्कालिक सतह ढलान के दो घटकों के उच्च लौकिक संकल्प के साथ स्वतंत्र माप23सक्षम बनाता है । इन माप तरंगों के दोनों प्रमुख आवृत्ति और प्रमुख तरंग लंबाई के आकलन की अनुमति है, साथ ही हवा के लिए सामांय दिशा में तरंग संरचना में अंतर्दृष्टि प्रदान करने के रूप में । एक pitot ट्यूब, जो एक कंप्यूटर नियंत्रित मोटर द्वारा खड़ी ले जाया जा सकता है, सेंसर के सेट का पूरक है और हवा वेग की माप के लिए प्रयोग किया जाता है ।
उन सभी अध्ययनों से स्पष्ट है कि यादृच्छिकता और हवा तरंगों के तीन आयामी मापा मापदंडों की महत्वपूर्ण परिवर्तनशीलता में भी स्थिर हवा के लिए मजबूर कर रही है और एक भी स्थान को मापने बनाया । इस प्रकार, मापा तरंग क्षेत्र की विशेषता समय तराजू के साथ अवधि अनुरूप के साथ लंबे समय तक माप को विश्वसनीय सांख्यिकीय मात्रा निकालने के लिए पर्याप्त जानकारी जमा की जरूरत है । को लहर क्षेत्र के स्थानिक परिवर्तन शासी तंत्र में मूल्यवान भौतिक अंतर्दृष्टि लाभ, यह आवश्यक है कि कई स्थानों पर बाहर ले जाने के लिए और परीक्षण अनुभाग में संभव के रूप में हवा प्रवाह दर के कई मूल्यों के लिए । इस लक्ष्य को प्राप्त करने के लिए, यह इस प्रकार उच्च एक स्वचालित प्रयोगात्मक प्रक्रिया लागू वांछनीय है ।
लहरों पर प्रयोग अस्थिर हवा से उत्तेजित जटिलता का एक अतिरिक्त स्तर परिचय मजबूर । ऐसे अध्ययनों में यह जरूरी है कि तात्कालिक मापी मापदंडों को हवा की गति के तात्कालिक स्तर पर ही रखूं. एक लगभग आवेगी हवा एक महत्वपूर्ण उदाहरण के रूप में मजबूर द्वारा आराम से उत्तेजित तरंगों पर प्रयोगों पर विचार करें । इस मामले में, कई स्वतंत्र मापन हवा की जरूरत है लहर हवा की कार्रवाई है कि एक ही निर्धारित पैटर्न24के बाद समय में बदलता है क्षेत्र के तहत विकसित कर रहे हैं । सार्थक सांख्यिकीय मानकों, हवा के प्रवाह की दीक्षा के बाद से गुजरा समय के एक समारोह के रूप में व्यक्त, तो स्वतंत्र बोध के संचित पहनावा से निकाले गए डेटा औसत द्वारा गणना कर रहे हैं । इस उपक्रम दसियों और निरंतर नमूने के घंटे के सैकड़ों शामिल हो सकते हैं । इस तरह के एक महत्वाकांक्षी कार्य को पूरा करने के लिए आवश्यक प्रयोगात्मक सत्रों की कुल अवधि, प्रयोग पूरी तरह से स्वचालित है जब तक कि पूरे दृष्टिकोण साध्य renders । हवा में कोई ऐसी पूरी तरह से कंप्यूटरीकृत प्रयोगात्मक प्रक्रिया-वेव सुविधाएं हाल ही में जब तक विकसित किया गया है । यह स्थिर मजबूर के तहत हवा तरंगों पर विश्वसनीय सांख्यिकीय आंकड़ों की कमी के लिए मुख्य कारणों में से एक है ।
के बाद से प्रयोग के लिए इस्तेमाल की सुविधा व्यावसायिक रूप से उपलब्ध है, बंद-the-शेल्फ हार्डवेयर, इसके मुख्य भागों का एक संक्षिप्त विवरण से निर्माण नहीं है यहां प्रदान की जाती है ।

चित्र 1. योजनाबद्ध (पैमाने पर नहीं) प्रायोगिक सुविधा का दृश्य. 1-ब्लोअर; 2-प्रवाह निपटान कक्ष; 3-बहिर्वाह निपटान कक्ष; 4-साइलेंसर बक्से; 5-परीक्षण अनुभाग; एक 6 समुद्र तट के साथ; 7-हीट एक्सचेंजर; 8-छत्ते; 9 नोक; 10-wavemaker; 11-प्रालंब; 12-साधन कैरिज; 13-वेव गेज एक stepper मोटर द्वारा संचालित; 14-Pitot ट्यूब एक stepper मोटर द्वारा संचालित. कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।
प्रयोगात्मक सुविधा एक बंद पाश हवा सुरंग के होते हैं एक लहर टैंक पर घुड़सवार (एक योजनाबद्ध दृश्य चित्रा 1में दिखाया गया है) । परीक्षण खंड 5 मीटर लंबा, ०.४ मीटर चौड़ा, और ०.५ मीटर गहरा है । sidewalls और फर्श 6 मिमी मोटी कांच की प्लेटों से बना रहे है और एक एल्यूमीनियम प्रोफाइल के बने फ्रेम के भीतर संलग्न हैं । एक ४० सेमी लंबे प्रालंब नलिका से पानी की सतह के लिए airflow पार अनुभाग के एक चिकनी विस्तार प्रदान करता है । लहर ऊर्जा छिद्रित पैकिंग सामग्री से बना समुद्र तट को अवशोषित टैंक के दूर अंत में स्थित है । एक कंप्यूटर नियंत्रित ब्लोअर 15 मी तक परीक्षण अनुभाग में मतलब हवा प्रवाह वेग प्राप्त करने की अनुमति देता है ।
कस्टम-निर्मित समाई-प्रकार १०० मिमी लंबी तरंग गेज यांग ऑक्सीकरण टैंटलम से बना है । ०.३ mm वायर एक ऊर्ध्वाधर एक पीसी-नियंत्रित कदम मोटर वेव गेज अंशांकन के लिए डिजाइन द्वारा संचालित मंच पर मुहिम शुरू की है । 3 मिमी के व्यास के साथ एक Pitot ट्यूब परीक्षण अनुभाग के केंद्रीय airflow भाग में गतिशील दबाव को मापने के लिए प्रयोग किया जाता है ।
LSG, तात्कालिक 2d पानी की सतह ढलान को मापने, एक परीक्षण अनुभाग है कि टैंक के साथ किसी भी स्थान पर तैनात किया जा सकता से अलग फ्रेम पर स्थापित है (चित्रा 2) । LSG चार मुख्य भागों के होते हैं: एक लेजर डायोड, एक Fresnel लेंस, एक प्रसार स्क्रीन, और एक स्थिति संवेदन डिटेक्टर (PSD) विधानसभा. लेजर डायोड के बारे में ०.५ mm के व्यास के साथ एक ६५० एनएम (लाल), २०० मेगावाट केंद्रित लेजर बीम उत्पंन करता है । २२.८६ सेमी की फोकल लंबाई के साथ २६.४ सेमी व्यास Fresnel लेंस 25 x 25 सेमी2 प्रसार स्क्रीन लेंस के पीछे फोकल विमान में स्थित करने के लिए आने वाली लेजर बीम निर्देशन ।

चित्र 2. लेजर ढलान गेज (LSG) के योजनाबद्ध दृश्य । 1-लेजर डायोड; 2-Fresnel लेंस; 3-प्रसार स्क्रीन; 4-स्थिति सेंसर डिटेक्टर (PSD) । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।
इस प्रोटोकॉल प्रक्रिया है कि प्रयोगों जिसमें कई मापदंडों निस्र्पक अस्थिर तरंगों समय पर निर्भर हवा के तहत एक साथ मापा जाता प्रदर्शन की अनुमति देता है का वर्णन करता है । प्रक्रिया समय पर पवन वेग के किसी भी वांछित निर्भरता के लिए समायोजित किया जा सकता है कि प्रयोगात्मक सुविधा की तकनीकी सीमाओं को ध्यान में रखते हुए प्राप्त किया जा सकता है । वर्तमान प्रोटोकॉल में विशेष रूप से प्रयोगों का वर्णन करता है जिसमें हर बोध में, हवा शुरू में शांत पानी पर लगभग लालसे प्रारंभ होता है । स्थिर तो मजबूर हवा काफी लंबे समय के लिए रहता है कि हवा-लहर परीक्षण खंड में हर जगह क्षेत्र अर्ध-स्थिर राज्य प्राप्त करता है । हवा अंततः बंद है, फिर से लगभग लालसे । सभी चरणों में, कई लहर मापदंडों दर्ज कर रहे हैं । प्रक्रिया है कि कई सांख्यिकीय प्रतिनिधि पहनावा की गणना-तात्कालिक स्थानीय हवा-लहर क्षेत्र निस्र्पक औसत मात्रा की अनुमति देता है उपंयास है, और हाल ही में हमारी सुविधा में किए गए प्रयोगों के पाठ्यक्रम में विकसित किया गया था 22 , 23 , 24.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
1. सिस्टम तैयारी
- गहरे पानी की स्थिति को संतुष्ट करने के लिए लगभग 20 सेमी की गहराई तक नल के पानी के साथ टैंक भरें; सतह तनाव को प्रभावित कर सकते है कि किसी भी दूषित पदार्थों की पानी की सतह को साफ ।
- वांछित लाने पर साधन गाड़ी की स्थिति ।
- Pitot ट्यूब माउंट और यह परीक्षण अनुभाग के airflow भाग के केंद्र में स्थिति ।
- अपने स्थिर अंशांकन सक्षम करने के लिए एक कंप्यूटर नियंत्रित ऊर्ध्वाधर चरण पर वेव गेज माउंट ।
- वांछित लाने पर LSG विधानसभा की स्थिति और वेव गेज से लगभग 7 सेमी की पार्श्व दूरी पर ऑप्टिकल पथ के साथ वेव गेज विधानसभा के हस्तक्षेप को खत्म करने के लिए ।
नोट: एक अपारदर्शी पर्दा का उपयोग करने के लिए परिवेश प्रकाश PSD के जोखिम को रोकने की सिफारिश की है, साथ ही साथ लेजर बीम के नकली प्रतिबिंब से पर्यावरण की रक्षा के लिए ।- पानी की टंकी के नीचे तैनात लेजर संरेखित करें ताकि बीम खड़ी निर्देशित है, और बीम ध्यान केंद्रित ।
- हवा के प्रवाह के लेंस की अशांति को कम करने के लिए पानी की सतह के ऊपर संभव के रूप में उच्च के रूप में परीक्षण अनुभाग के भीतर fresnel लेंस स्थिति ।
- सुनिश्चित करें कि विक्षेपित लेजर बीम चरम हवा प्रयोगात्मक सत्र में योजना बनाई शर्तों के तहत अपने केंद्रीय भाग में लेंस हिट ।
- लेंस के फोकल विमान में वास्तव में प्रसार स्क्रीन माउंट, तो दोनों लेंस और स्क्रीन के क्षैतिज और ऊर्ध्वाधर संरेखण की जांच करें ।
- सुनिश्चित करें कि किसी भी दो समानांतर ऊर्ध्वाधर लेजर मुस्कराते हुए केंद्र में वास्तव में प्रसार स्क्रीन मारा जब पानी की सतह अभी भी है ।
नोट: यह एक दूसरे से कुछ दूरी पर तैनात दो समान पराबैंगनीकिरण का उपयोग कर परीक्षण किया जा सकता है । - स्थिति यकीन है कि प्रसार स्क्रीन के पूरे क्षेत्र डिटेक्टर के प्रभावी क्षेत्र के भीतर है बनाने PSD । लेंस और स्क्रीन के बीच वास्तविक दूरी के लिए लेंस सेटिंग्स का समायोजन करके PSD लेंस का ध्यान केंद्रित प्रदर्शन ।
2. अंशांकन और सेंसर का संचालन
-
तरंग गेज का अंशांकन
- प्रत्येक माप स्थान और प्रयोगात्मक चलाने में उम्मीद की प्रत्येक अधिकतम हवा वेग के लिए लहर गेज अंशांकन प्रदर्शन.
- सेंसर की अनुलंब स्थिति निर्धारित करें ताकि अर्थ जल स्तर लगभग संवेदन तारों की लंबाई के मध्य में हो.
- वांछित मूल्य के लिए धौंकनी गति सेट, और हवा तेजी से एक पर्याप्त लंबे समय (2-3 मिनट) के लिए उड़ाने के लिए अनुमति देते हैं ।
- एक आस्टसीलस्कप का प्रयोग, मैंयुअल रूप से संवेदनशीलता को समायोजित, लाभ, और तरंग गेज की ऑफसेट कंडीशनर यूनिट का उपयोग सुनिश्चित करने के लिए कि वोल्टेज मूल्यों उच्चतम शिखा के लिए इसी और सबसे कम लहर क्षेत्र में उंमीद गर्त की सीमा के भीतर है एक/ कनवर्टर (+/-10 वी) ।
- कई मिनट के लिए धौंकनी बंद करो, जब तक पानी की सतह पूरी तरह से परेशान हो जाता है ।
- सत्यापित करें कि जलमग्न लंबाई की अपेक्षा अधिकतम शिखा और गर्त मूल्यों के भीतर लहर गेज खड़ी चलती द्वारा है ।
- तरंग गेज का स्वत: अंशांकन का उपयोग करते हुए अभी भी पानी में एक कस्टम बनाया दिनचर्या निर्दिष्ट गहराई की एक संख्या पर गेज को विलय करने और प्रत्येक गहराई के लिए 5 एस के दौरान मतलब वोल्टेज उत्पादन रिकॉर्डिंग.
- एक द्विघात अंशांकन बहुपद दर्ज डेटा के लिए फिट करने के लिए निर्भरता एच (वी), जहां एच डूब गहराई (तात्कालिक सतह ऊंचाई करने के लिए इसी) है, गेज उत्पादन वोल्टेज वीके एक समारोह के रूप में प्राप्त करने के लिए ।
- नेत्रहीन फिट अंशांकन बहुपद की गुणवत्ता की जांच करें (चित्र 3) ।
- प्रत्येक माप स्थान और प्रयोगात्मक चलाने में उम्मीद की प्रत्येक अधिकतम हवा वेग के लिए लहर गेज अंशांकन प्रदर्शन.

चित्र 3. तरंग गेज के अंशांकन वक्र । इस आंकड़े का एक बड़ा संस्करण देखने के लिए कृपया यहां क्लिक करें ।
-
LSG का अंशांकन और समायोजन
- सेंसर विधानसभा के प्रत्येक विस्थापन के बाद LSG के प्रदर्शन का सत्यापन करें ।
- एक ऑप्टिकल कील एक क्षैतिज कांच शीट पर रखा चश्मे का प्रयोग, ऑप्टिकल एक ज्ञात पानी की सतह ढलान अनुकरण अक्ष के संबंध में लेजर बीम विचलित ।
- नमूना एक आस्टसीलस्कप या एक कस्टम निर्मित डेटा अधिग्रहण कार्यक्रम का उपयोग कर प्रसार स्क्रीन पर किंचित लेजर बीम स्थान के PSD outputs ।
- बीम झुकाव कोण और मापा निर्देशांक लेजर बीम स्पॉट समन्वय से ढाल की गणना; ज्ञात कील कोण के साथ परिणाम की तुलना करें ।
- एक या एक से अधिक चश्मे का उपयोग कई विक्षेपन कोण के लिए प्रक्रिया को दोहराएँ.
नोट: विक्षेपन कोण के साथ कील चश्मे २.५ ° से लेकर १७.५ डिग्री का उपयोग किया गया; यदि परीक्षण प्रसार स्क्रीन के साथ psd के ग़लत संरेखण के कारण विफल रहता है, मैंयुअल रूप से psd समायोजित, के लिए सही के लिए ग़लत संरेखण । इस प्रक्रिया को मैंयुअल रूप से एक 2d क्षैतिज अनुवाद मंच और एक स्तर का उपयोग किया जाता है और बहुत समय लगता है ।
-
PSD और अंशांकन प्रक्रिया की रैखिकता का सत्यापन
- एक समान रूप से अंतरिक्ष ग्रिड है कि प्रसार स्क्रीन पर एक पारदर्शी चादर पर मुद्रित किया गया है और यह इतना उंमुख है कि इसके अक्ष, x और yरखें, नीचे और पार हवा दिशाओं के साथ गठबंधन कर रहे हैं, क्रमशः (चित्रा 4) ।
नोट: ग्रिड सरल प्रसार स्क्रीन पर वांछित स्थानों के लिए लेजर बीम निर्देशन की सुविधा और सही ढंग से या तो चश्मे का एक सेट का उपयोग कर या साथ में प्रसार स्क्रीन के नीचे लेजर चलती हवा और crosswind दिशाओं. - चश्मे के सेट का उपयोग करना, ऊर्ध्वाधर लेजर बीम से ध्यान हटाने के लिए एक निरंतर azimuthal कोण को बनाए रखते हुए प्रसार स्क्रीन पर लेजर बीम स्पॉट के कई रेडियल पदों को प्राप्त करने के लिए ।
नोट: 1 सेमी और 7 सेमी की अधिक से अधिक त्रिज्या के संकल्प 9 azimuthal कोण से प्रत्येक के लिए प्रयोग किया जाता है । - y निरंतर समंवय रखते हुए, फिर x-दिशा में कई पदों के लिए लेज़र स्थान ले जाएं, तब आंदोलन की दिशा को yमें बदलें, और x स्थिरांक रखें ।
नोट: उपयोग की गई श्रेणी और रिज़ॉल्यूशन पिछले अनुभाग के समान हैं । - हर अंशांकन में ग्रिड पर लगभग ५० अंक एकत्र करें ।
नोट: लेजर बीम स्पॉट निर्देशांक psd द्वारा अधिग्रहीत कर रहे है और एक मानक दो चैनल psd से जुड़े आस्टसीलस्कप का उपयोग कर मूल्यांकन किया ।- प्रत्येक दिशा के लिए, डेटा के रेखीय फ़िट का उपयोग करने के लिए अंशांकन गुणांक को प्राप्त करने के लिए PSD संवेदक पर लेजर बीम के निर्देशांकों को प्रसारात्मक स्क्रीन पर इसी निर्देशांक में परिवर्तित कर दें.
नोट: PSD अंशांकन का एक उदाहरण के परीक्षण अनुभाग के centerline साथ लिया अंक का एक सेट के लिए चित्रा 5 में साजिश रची है । सेंसर की प्रतिक्रिया, और इस प्रकार अंशांकन गुणांक, लगभग सभी दिशाओं में समान है जब प्रसार स्क्रीन के अक्षों और सेंसर ठीक से गठबंधन कर रहे हैं. ग्रिड अंशांकन प्रक्रिया की सुविधा, एक आसान निर्धारण की अनुमति लेजर ढलान के प्रसार स्क्रीन पर निर्देशांक ।
- प्रत्येक दिशा के लिए, डेटा के रेखीय फ़िट का उपयोग करने के लिए अंशांकन गुणांक को प्राप्त करने के लिए PSD संवेदक पर लेजर बीम के निर्देशांकों को प्रसारात्मक स्क्रीन पर इसी निर्देशांक में परिवर्तित कर दें.
- एक समान रूप से अंतरिक्ष ग्रिड है कि प्रसार स्क्रीन पर एक पारदर्शी चादर पर मुद्रित किया गया है और यह इतना उंमुख है कि इसके अक्ष, x और yरखें, नीचे और पार हवा दिशाओं के साथ गठबंधन कर रहे हैं, क्रमशः (चित्रा 4) ।
- सेंसर विधानसभा के प्रत्येक विस्थापन के बाद LSG के प्रदर्शन का सत्यापन करें ।

चित्र 4. प्रसार स्क्रीन ग्रिड । ग्रिड सरल प्रसार स्क्रीन पर वांछित स्थानों के लिए लेजर बीम निर्देशन की सुविधा और सही, या तो चश्मे का एक सेट का उपयोग कर या साथ में प्रसार स्क्रीन के नीचे लेजर चलती हवा और crosswind दिशाओं कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण देखें ।

चित्र 5. PSD अंशांकन वक्र । आंकड़ा दर्शाता है कि PSD निर्गम वोल्टेज का अनुवाद करने के लिए पर्याप्त परिणाम पैदावार निर्देशांक । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।
3. प्रायोगिक प्रक्रिया और डाटा अधिग्रहण
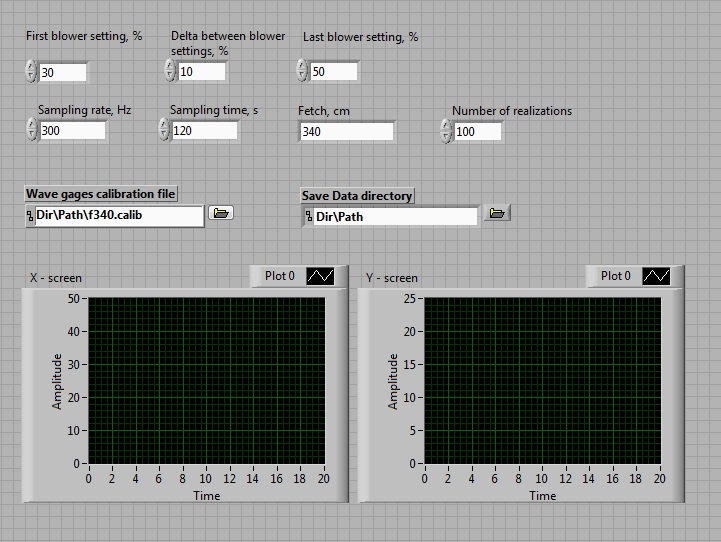
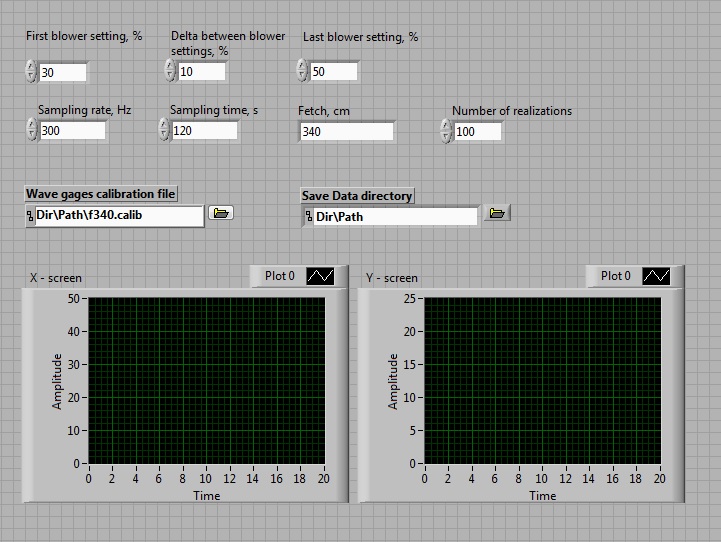
नोट: निंन चरणों में उपयोग किए गए उपयोगकर्ता इंटरफ़ेस के लिए अनुपूरक चित्र 1 देखें ।
- एक कस्टम-निर्मित प्रोग्राम उपयोगकर्ता इंटरफ़ेस का उपयोग कर ब्लोअर आवृत्ति सेट करें ।
नोट: शुरू में अबाधित पानी की सतह पर हवा वेग के लगभग stepwise वृद्धि लागू किया गया था, एक निर्धारित अवधि (१२० s) के लिए एक स्थिर airflow दर के बाद, और एक लगभग आवेगी बंद धौंकनी के नीचे । - अलग स्थिर हवा प्रवाह दर और आवश्यक ब्लोअर सेटिंग्स की संख्या निर्धारित करते हैं ।
- Pitot ट्यूब द्वारा पता लगाया गतिशील दबाव रूपांतरों की अपेक्षित श्रेणी के लिए दबाव transducer सेटिंग्स समायोजित करें ।
- सुनिश्चित करें कि प्रत्येक प्राप्ति की शुरुआत में, वहां कोई हवा है और पानी की सतह (दर्पण चिकनी) परेशान नहीं है । धौंकनी के संचालन के साथ डेटा अधिग्रहण तुल्यकालिक शुरू करो ।
- रिकॉर्ड तात्कालिक सतह ऊंचाई, साथ में सतह ढलान घटकों-और crosswind दिशाओं, Pitot ट्यूब उत्पादन की निगरानी मतलब पवन वेग यू, और निर्धारित नमूना दर पर ब्लोअर नियंत्रक से वोल्टेज भिन्नता ( ३०० हर्ट्ज/चैनल इस्तेमाल किया गया था) ।
नोट: वोल्टेज लहर से कार्यक्रम द्वारा अधिग्रहीत गेज स्वचालित रूप से चित्रा 3में प्रस्तुत फिट से अंशांकन गुणांक का उपयोग कर ऊंचाई सतह में कनवर्ट किया जाता है । - पर्याप्त समय के लिए जारी रखें नमूना ब्लोअर के शटडाउन के बाद क्षय लहर क्षेत्र रिकॉर्ड करने के लिए ।
- नमूने के पूरा होने पर, सुनिश्चित करें कि स्वत: प्रयोगात्मक प्रक्रिया पर्याप्त समय के लिए अनुमति देता है (प्रणाली पर निर्भर करता है) को परेशान हालत में पानी की सतह लाने के लिए अगले चलाने की दीक्षा से पहले ।
- अनुवर्ती प्रक्रिया के लिए सभी रिकॉर्ड किए गए डेटा को सहेजें ।
- प्रतीति की निर्धारित संख्या प्रदर्शन (आमतौर पर १०० स्वतंत्र रन पर्याप्त पाया गया) ।
- पहनावा-धौंकनी की दीक्षा के बाद से गुजरे समय के एक समारोह के रूप में दर्ज आंकड़ों के औसत मापदंडों की गणना ।
- परीक्षण अनुभाग में चयनित लक्ष्य हवा वेग करने के लिए इसी ब्लोअर की अगली सेटिंग के लिए पूरी प्रक्रिया को दोहराएँ.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
प्रतिनिधि पहनावा-औसत परिणाम चित्रा 6, चित्रा 7, और चित्रा 8में साजिश रची है । तात्कालिक सतह ऊंचाई के RMS मानों की भिंनता <η2>1/2 कि यादृच्छिक पवन तरंगों के आयाम की विशेषता के रूप में चित्रा 6 में प्रस्तुत के रूप में समय के एक समारोह के बाद से गुजर ब्लोअर की दीक्षा । परिणाम wavemaker से 3 दूरी के लिए प्रस्तुत कर रहे हैं, एक्स, और तीन लक्ष्य के लिए पवन वेग, यू.
निश्चित फ़ेच एक्स के लिए , संतुलन अर्ध स्थिर राज्य विशेषता तरंग आयाम हवा वेग यूके साथ वृद्धि; हालांकि, की अवधि के अर्ध स्थिर मान प्राप्त करने के लिए आवश्यक <η2>1/धौंकनी की दीक्षा के बाद दृढ़ता से किसी भी दिया एक्स पर यू पर निर्भर नहीं लगता । हवा के एक निरंतर लक्ष्य मूल्य के लिए विशेषता तरंग आयाम के संतुलन मूल्यों को लाने के साथ यू वृद्धि मजबूर । यह भी नोट करें कि <η2>1/2 के परिवर्तन की दर में भिंनता चित्रा 6में प्लॉट किए गए प्रत्येक वक्र में पहचानी जाती है, स्पष्ट रूप से सुझाव देती है कि भिंन अवस्थाएं हवा-तरंगों के विकास में मौजूद है प्रक्रिया. downwind और crosswind ढलान घटकों का पहनावा-औसत RMS मान, <ηx2>1/2 और <ηy2>1/ 2, दो कौड़ी और पवन वेग यू के दो मूल्यों के लिए चित्रा 7 में रची गई है ।
यह चित्रा 6 और चित्रा 7 की तुलना से स्पष्ट है कि दोनों सतह ढलान घटकों की भिन्नता की विशेषता समय तराजू विशेष रूप से सतह ऊंचाई भिन्नता के इसी तराजू से कम कर रहे हैं. <ηx2>1/2 और <ηy2>1/2 परिमाण के समान क्रम के होते हैं, हालांकि विशेषता crosswind दिशा में ढलानों के साथ-साथ हवा की दिशा में ढलानों से छोटे होते हैं । इन परिणामों से संकेत मिलता है कि हवा-लहरें कम सेही और त्रि-आयामी हैं. अर्ध-स्थिर हवा के तहत दोनों दिशाओं में विशेषता ढलान मूल्यों को अनिवार्य रूप से एक्सलाने के स्वतंत्र होने लगते हैं, लेकिन हवा वेग यू के साथ वृद्धि । फिक्स्ड एक्स और यू के लिए दो ढलान घटकों के लौकिक भिंनता पर एक करीब देखो पता चलता है कि प्रारंभिक वृद्धि में <ηx2>1/2 लगातार है और <ηy2>1/2की तुलना में विशेष रूप से तेजी । इस प्रकार, हवा के सक्रियकरण के साथ शांत पानी की सतह पर दिखाई देते है कि प्रारंभिक तरंग के विकास के बहुत प्रारंभिक चरण के दौरान, वे लगभग दो आयामी के रूप में देखा जा सकता है । यह चरण केवल एक सेकंड के एक अंश के लिए रहता है; फिर भी, यह जोर देना महत्वपूर्ण है कि लहर क्षेत्र के आवश्यक तीन आयामी एक निश्चित देरी के साथ विकसित करता है ।
ब्लोअर के शटडाउन के बाद वेव फील्ड का व्यवहार चित्रा 8में दिखाया गया है । टैंक में शेष लहरों तेजी से खोखली, प्रभावी ढंग से लगभग 1 मिनट के बाद गायब हो ।

चित्रा 6. सतह ऊंचाई के RMS का लौकिक रूपांतर । यह आंकड़ा दर्शाता है कि <η2>1/2 द्वारा दर्शाई गई विशेषता तरंग ऊंचाई की भिंनता का समय तराजू लक्ष्य पवन वेग U पर और फ़ेच x पर निर्भर करता है । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।

चित्र 7. downwind/क्रॉस-पवन सतह ढलान घटकों के RMS के समय के साथ भिन्नता । downwind और crosswind ढलान घटकों का पहनावा-औसत RMS मान, <ηx2>1/2 और <ηy2>1/2, यहां साजिश रची जाती है । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।

चित्र 8. हवा के क्षय-लहर ब्लोअर के शटडाउन के बाद दायर की । downwind और crosswind ढलान घटकों का पहनावा-औसत RMS मान, <ηx2>1/2 और <ηy2>1/2 दो कौड़ी और पवन वेग यू के दो मूल्यों के लिए चित्रा 7 में रची गई । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।
अनुपूरक चित्रा 1: कस्टम निर्मित सॉफ्टवेयर उपयोगकर्ता-डेटा अधिग्रहण के लिए इंटरफेस. इस फ़ाइल को डाउनलोड करने के लिए कृपया यहां क्लिक करें.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
वर्तमान प्रयोगात्मक प्रोटोकॉल अस्थिर हवा मजबूर है कि समय और अंतरिक्ष में विकसित के तहत एक लहर क्षेत्र के मात्रात्मक लक्षण वर्णन के उद्देश्य से है । के बाद से हवा-लहरों मूलतः यादृच्छिक और तीन आयामी हैं, और इस तरह समय और अंतरिक्ष में जल्दी बदलती हैं, एक बढ़ती हवा के व्यक्तिगत बोध के रिकॉर्ड समय के तहत लहर क्षेत्र निर्भर हवा केवल शासी के गुणात्मक अनुमान प्रदान कर सकते है मजबूर वेव पैरामीटर्स । इस प्रोटोकॉल के लक्ष्य को प्राप्त करने और सांख्यिकीय विश्वसनीय समय प्राप्त करने के लिए-और फ़ेच-निर्भर लहर विशेषताओं, समय में हवा भिंनता के एक समान पैटर्न के साथ कई प्रयोगात्मक रन के औसत को हल पहनावा लागू किया जाना है । अलग लक्ष्य हवा वेग और कौड़ी के लिए इस तरह के विस्तृत और व्यापक जानकारी के संचय के बाद से बहुत समय लगता है, प्रयोगात्मक प्रक्रिया को स्वचालित और पर्याप्त रूप से अलग करने के लिए आवश्यक समायोजन की अनुमति लचीला हो गया है शर्तों को मजबूर हवा । हमारे ज्ञान का सबसे अच्छा करने के लिए, प्रयोगात्मक प्रक्रिया इस पांडुलिपि में वर्णित है कि चर हवा लौकिक और स्थानिक संकल्प के साथ मजबूर के तहत विविध सांख्यिकीय लहर क्षेत्र मापदंडों प्रदान करने में सक्षम है काफी हद तक अब तक उपलब्ध नहीं था ।
ध्यान दें कि एक प्रयोगशाला लहर टैंक में पवन लहर माप बाहर ले जाने के लिए आवश्यक प्रयोगों की अवधि की सुविधा के आकार के साथ काफी बढ़ जाती है । यह आंशिक रूप से है क्योंकि लहर वृद्धि चरण की अवधि फ़ेच के साथ बढ़ जाती है ( चित्र 6देखें) । तरंग लंबाई और समय भी17,21,23,24लाने के साथ बढ़ती है, इस प्रकार सांख्यिकीय प्रतिनिधि डेटा जमा करने के लिए, प्रत्येक रन में प्रयोग की अवधि के लिए लंबे समय की तुलना में होना है इसी प्रमुख लहर अवधि । वर्तमान अध्ययन में कार्यरत लोगों की तुलना में काफी अधिक कौड़ी पर व्यक्तिगत बोध इस प्रकार lengthier किया जा सकता है । इससे भी अधिक महत्वपूर्ण है, सबसे लंबे समय तक किसी भी प्रयोगात्मक सुविधा में हवा से उत्तेजित तरंग दैर्ध्य टैंक की विशेषता लंबाई के आदेश के हैं । अवशिष्ट एक बड़ी सुविधा में हवा के शटडाउन के बाद टैंक में शेष तरंगों इस प्रकार उनके क्षय के लिए अब समय की आवश्यकता है । एक बड़ा हवा में लगातार रन के बीच अंतराल-लहर को परेशान पानी की सतह पर लौटने के लिए आवश्यक टैंक इसलिए काफी देर से छह मिनट के अंतराल हमारे प्रयोगों में कार्यरत होना चाहिए ।
सामांय दृष्टिकोण ऊपर वर्णित स्थिर और अस्थिर हवा की एक किस्म के लिए लागू किया जा सकता शर्तों मजबूर । इस पांडुलिपि में, मजबूर हवा के लौकिक रूपांतर को प्रभावी ढंग से आवेगी हवा के तहत अस्थिर लहर क्षेत्र का अध्ययन करने के लिए डेटा के एक पर्याप्त शरीर के संचय को सक्षम करने के लक्ष्य के साथ चुना गया था मजबूर और बंद, के रूप में के रूप में अच्छी तरह के रूप में स्थिर हवा मजबूर । यह अंत करने के लिए, देखभाल सुनिश्चित करने के लिए कि पानी की सतह शांत और प्रत्येक प्रयोगात्मक चलाने की दीक्षा से पहले परेशान था लिया गया था । प्रत्येक पुनरावृत्ति में, हवा लगभग लालसे ब्लोअर द्वारा शुरू किया गया था, तो airflow दर एक पर्याप्त लंबे समय के लिए लगातार (वर्तमान प्रयोगों में 2 मिनट), जिसके बाद धौंकनी बंद था बने रहे । इस दृष्टिकोण अलग से अध्ययन करने की अनुमति देता है अस्थाई रूप से विकसित हवा की लहर शुरू में शांत पानी की सतह से बढ़ दिया और हवा वेग में अर्ध स्थिर राज्य के लिए बढ़ती है, तो स्थिर हवा के तहत लहरों की विशेषता मजबूर, और अंत में लहरों के क्षय एक बार मजबूर हवा अचानक बंद हो जाता है ।
वर्तमान अध्ययन में प्रत्येक व्यक्ति के बोध की अवधि है कि इस प्रकार शांत अवधि में शामिल 8 मिनट से अधिक है । इसलिए, प्रयोगों जिसमें डेटा १०० स्वतंत्र एक एकल लाने और लक्ष्य हवा वेग पिछले लगभग 15 घंटे (वेव गेज अंशांकन प्रक्रिया की अवधि सहित) पर रन के लिए जमा हो जाती है । यह स्पष्ट है कि इस तरह के एक प्रयास सफल होने के लिए, यह जरूरी है कि पूरी प्रयोगात्मक प्रक्रिया को स्वचालित रूप से बाहर किया जा सकता है, यानी पूरी तरह से मानवीय हस्तक्षेप के बिना ।
यह इस प्रकार जोर दिया जाना चाहिए कि हमारी सुविधा के दोनों मामूली आकार और पूरी तरह से स्वचालित मापने और अंशांकन प्रक्रियाओं को अपनाया प्रायोगिक दृष्टिकोण के कार्यांवयन के लिए महत्वपूर्ण थे । जबकि हवा पर विस्तृत परिणाम अस्थिर मजबूर के तहत लहर क्षेत्र विकास भविष्य में कहीं और प्रस्तुत किया जाएगा, यह आंकड़ा 6, चित्रा 7से स्पष्ट है, और 8 आंकड़ा है कि पहले अनुपलब्ध के ठीक विवरण पर जानकारी पवन-तरंग विकास वर्तमान अध्ययन में संचित है । यह जानकारी विभिंन सैद्धांतिक मॉडल है कि हवा1,2,3,4,5,24द्वारा तरंगों के उत्तेजना के साथ सौदा करने के लिए मांय करने के लिए इस्तेमाल किया जाएगा ।
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
लेखकों के पास कुछ भी खुलासा नहीं है.
Acknowledgments
यह काम इसराइल विज्ञान फाउंडेशन, अनुदान # 306/15 द्वारा समर्थित किया गया था ।
Materials
| Name | Company | Catalog Number | Comments |
| PSD | THORLABS | PDP90A | |
| Laser Diode | any laser pointer ≤ 200 mW | ||
| Aspheric Fresnel Lens | EDMUND OPTICS | #46-390 | Diameter 10.4'', Focal length 9'' |
| Wave-gauge | custom made | ||
| Pressure Transducer | MAMAC SYSTEMS | PR-274-R2-VDC | |
| Signal Conditioner | custom made | ||
| Diffusive screen | EDMUND OPTICS | #02-147 | |
| Water tank | custome made | ||
| A/D card PCI-6221 | National Instruments | 779066-01 | |
| Pitot tube | KIMO Instruments | 12971 | |
| 15° Nom. VIS-NIR Coated, Wedge Prism | EDMUND OPTICS | #47-624 | |
| 10° Nom. VIS 0° Coated, Wedge Prism | EDMUND OPTICS | #49-444 | |
| 2.5° Nom. Fused Silica Wedge Prism Uncoated | EDMUND OPTICS | #84-863 | |
| 4° Nom. Uncoated, Wedge Prism | EDMUND OPTICS | #43-650 | |
| 5.0° Nom. Fused Silica Wedge Prism Uncoated | EDMUND OPTICS | #84-865 | |
| LabView Full Development System | National Instruments | 776670-35 |
References
- Sir William Thomson, F. R. S. Hydrokinetic solutions and observations. Philosophical Magazine. 42, 362-377 (1871).
- Jeffreys, H. On the formation of water waves by wind. Proc. Roy. Soc. London Ser. A. 107, 189-206 (1925).
- Miles, J. W. On the generation of surface waves by shear flows. J. Fluid Mech. 3 (2), 185-204 (1957).
- Phillips, O. M. On the generation of waves by turbulent wind. J. Fluid Mech. 2 (5), 417-445 (1957).
- Plate, E. J., Chang, P. C., Hidy, G. M. Experiments on the generation of small water waves by wind. J. Fluid Mech. 35 (4), 625-656 (1969).
- Mitsuyasu, H. On the growth of the spectrum of wind-generated waves I. Rep. Res. Inst. Appl. Mech., Kyushu Univ. 16 (55), 459-482 (1968).
- Toba, Y. Local balance in the air-sea boundary processes, I. On the growth process of wind waves. J. Oceanog. Soc. Japan. 28, 109-120 (1972).
- Toba, Y. Local balance in the air-sea boundary processes. III. On the spectrum of wind waves. J. Oceanogr. Soc. Japan. 29, 209-220 (1973).
- Hara, T., Bock, E. J., Donelan, M. Frequency-wavenumber spectrum of wind-generated gravity-capillary waves. J. Geoph. Res. 102, 1061-1072 (1997).
- Caulliez, G., Guérin, C. -A. Higher-order statistical analysis of short wind wave fields. J. Geophys. Res. 117, C06002 (2012).
- Mitsuyasu, H., Rikiishi, K. The growth of duration-limited wind waves. J. Fluid Mech. 85, 705-730 (1978).
- Kawai, S. Generation of initial wavelets by instability of a coupled shear flow and their evolution to wind waves. J. Fluid Mech. 93 (4), 661-703 (1979).
- Waseda, T., Toba, Y., Tulin, M. P. Adjustment of wind waves to sudden changes of wind speed. J. Oceanography. 57, 519-533 (2001).
- Uz, B. M., Hara, T., Bock, E. J., Donelan, M. A. Laboratory observations of gravity-capillary waves under transient wind forcing. J. Geophys. Res.: Oceans. 108 (C2), (2003).
- Hwang, P. A., Wang, D. W. Field measurements of duration-limited growth of wind-generated ocean surface waves at young stage of development. J. Phys. Oceanogr. 34 (10), 2316-2326 (2004).
- Hwang, P. A., García-Nava, H., Ocampo-Torres, F. J. Observations of wind wave development in mixed seas and unsteady wind forcing. J. Phys. Oceanogr. 41, 2340-2359 (2011).
- Liberzon, D., Shemer, L. Experimental study of the initial stages of wind waves' spatial evolution. J. Fluid Mech. 681, 462-498 (2011).
- Miles, J. W. On generation of surface waves by shear flows. Part 2. J. Fluid Mech. 6 (4), 568-582 (1959).
- Plant, W. J. A relationship between wind stress and wave slope. J. Geophys. Res. 87, 1961-1967 (1982).
- Zavadsky, A., Shemer, L. Characterization of turbulent air flow over evolving water-waves in a wind-wave tank. J. Geophys. Res. 117, C00J19 (2012).
- Zavadsky, A., Liberzon, D., Shemer, L. Statistical analysis of the spatial evolution of the stationary wind wave field. J. Phys. Oceanogr. 43, 65-79 (2013).
- Zavadsky, A., Benetazzo, A., Shemer, L. On the two-dimensional structure of short gravity waves in a wind wave tank. Phys. Fluids. 29 (1), 016601 (2017).
- Zavadsky, A., Shemer, L. Investigation of statistical parameters of the evolving wind wave field using Laser Slope Gauge. Phys. Fluids. 29 (5), (2017).
- Zavadsky, A., Shemer, L. Water waves excited by near-impulsive wind forcing. J. Fluid Mech. , (2017).

{kind=link}
{kind=link}