

Summary
وتهدف هذه الطريقة إلى تحديد العيوب العمودية تحت السطحية. هنا، ونحن زوجين ليزر مع المغير الضوء المكاني وتحريك مدخلات الفيديو لتسخين سطح العينة حتما مع اثنين من خطوط على مراحل مضادة على مراحل في حين الحصول على الصور الحرارية حلها للغاية. ويتم استرجاع موضع الخلل من تقييم الحد الأدنى لتداخل الموجة الحرارية.
Abstract
يتم استخدام طريقة عرض لتحديد العيوب تحت السطحية موجهة عموديا على السطح. ولتحقيق ذلك، نقوم بإنشاء حقول موجات حرارية تتدخل بشكل مدمر تتخللها العيب. ويقاس هذا التأثير ويستخدم لتحديد موقع العيب. نحن تشكيل حقول الموجة تدميرا مدمرة باستخدام جهاز عرض معدل. يتم استبدال محرك الضوء الأصلي من جهاز العرض مع ليزر الصمام الثنائي ديود عالية الطاقة. يتم تشكيل شعاعها ومحاذاة إلى المغير الضوء المكاني للجهاز والأمثل للحصول على الإنتاجية البصرية الأمثل والإسقاط متجانس من خلال توصيف أول الشخصية شعاع، وثانيا، وتصحيحه ميكانيكيا وعدديا. يتم تعيين كاميرا الأشعة تحت الحمراء عالية الأداء (إر) وفقا لحالة هندسية ضيقة (بما في ذلك التصحيحات من تشوهات الصورة الهندسية) ومتطلبات الكشف عن التذبذبات درجة الحرارة الضعيفة على سطح العينة. الحصول على البيانات لا يمكن أن يؤديها مرة واحدة في المزامنةيتم إنشاء الاستقطاب بين مصادر حقل الموجة الحرارية الفردية، ومرحلة المسح الضوئي، وكاميرا الأشعة تحت الحمراء باستخدام إعداد تجريبي مخصص يحتاج إلى ضبطه للمواد المحددة التي يجري التحقيق فيها. خلال مرحلة ما بعد المعالجة، يتم استخراج المعلومات ذات الصلة عن وجود خلل تحت سطح العينة. يتم استرجاعها من الجزء المتأرجح من الإشعاع الحراري المكتسب القادم من ما يسمى خط استنفاد سطح العينة. ويستنتج الموقع الدقيق للخلل من تحليل الشكل المكاني والزماني لهذه التذبذبات في خطوة نهائية. الطريقة خالية من الإشارة وحساسة جدا للتغيرات داخل مجال الموجة الحرارية. حتى الآن، وقد تم اختبار هذه الطريقة مع عينات من الصلب ولكن ينطبق على مواد مختلفة أيضا، لا سيما المواد الحساسة للحرارة.
Introduction
يتم استخدام طريقة الحرارة الحرارية الضوئية المتوقعة (لبت) لتحديد العيوب تحت السطحية التي تكون جزءا لا يتجزأ من حجم عينة الاختبار والموجهة في الغالب عمودي على سطحه.
وتستخدم الطريقة التداخل المدمر لحقلين من الموجات الحرارية المضادة للمراحل على نفس الاستطالة والتردد كما هو مبين في الشكل 1 ب . في المواد الخالية من عيب الخواص، والموجات الحرارية تحييد مدمرة ( أي صفر درجة الحرارة التذبذب) على مستوى التماثل من خلال تراكب متماسكة. وفي حالة وجود مادة ذات عيب تحت السطح، تستفيد الطريقة من تفاعل المكونات الجانبية ( أي داخل الطائرة) بين تدفق الحرارة العابرة وهذا العيب. ويمكن قياس هذا التفاعل في استطالة درجة الحرارة تتأرجح إعادة تشكيلها في خط التماثل على سطح العينة. الآن، يتم مسح العينة التي تحتوي على عيب بواسطة حقل الموجة الحرارية متراكبة ويتم قياس مستوى استطالة درجة الحرارة فيما يتعلق بموقف العينة. ونظرا للتناظر، تستوفي حالة التداخل المدمرة مرة أخرى عندما يعبر العيب طائرة التماثل؛ وهذا يتيح لنا لتحديد موقع عيب جدا بحساسية. وعلاوة على ذلك، وبما أن مستوى الاضطراب الأقصى للتداخل المدمر يرتبط بعمق العيب، فمن الممكن تحديد عمقه من خلال تحليل مسح درجة الحرارة 1 .
يمكن أن يتم تعيين لبت لمنهجية الحرارة الحرارية، وهي طريقة راسخة غير المدمرة، حيث يتم توليد التدفئة عابرة بنشاط ويتم قياس، وكذلك عابرة، توزيع درجة الحرارة عن طريق كاميرا الأشعة تحت الحمراء الحرارية. بشكل عام، حساسية هذه المنهجية تقتصر على العيوب التي تتجه أساسا عمودي على تدفق الحرارة العابرة. وعلاوة على ذلك، لأن المعادلة الحاكمة التوصيل الحرارة عابرة هو متقطع جزئية مكافئنتيال المعادلة، وتدفق الحرارة إلى حجم هو قوي معطوب. ونتيجة لذلك، يقتصر عمق التحقيق للمنهج الحراري الحراري على منطقة قريبة من السطح، وعادة في نطاق ملليمتر. اثنان من تقنيات التصوير الحراري النشط الأكثر شيوعا هي نبض والحرارة في الحرارة. فهي سريعة بسبب مستو إضاءة سطح بصري 2 ، ولكن يؤدي إلى تدفق الحرارة عابرة عمودي على السطح. ولذلك، فإن حساسية هذه التقنيات تقتصر على العيوب الموازية الموجهة في الغالب (على سبيل المثال الامتلاء أو الفراغات) إلى سطح العينة ساخنة. وتنص قاعدة تجريبية للحرارة الحرارية النبضية على أن "نصف قطر أصغر عيب قابل للكشف ينبغي أن يكون على الأقل من مرة إلى مرتين أكبر من عمقه تحت السطح" 3 . لزيادة منطقة التفاعل الفعال بين عيب موجه عموديا ( مثل الكراك) والتدفق الحراري، يجب أن يكون اتجاه التدفق الحراريتغير. الإثارة المحلية، باستخدام ليزر مركز مع بقعة خطية أو دائرية على سبيل المثال، يولد تدفق الحرارة مع عنصر في الطائرة التي هي قادرة على التفاعل بشكل فعال مع عمودي عمودي 4 ، 5 ، 6 ، 7 .
في الطريقة المعروضة، ونحن أيضا استخدام مكونات تدفق الحرارة الجانبية للكشف عن العيوب تحت السطحية، ولكننا نستخدم حقيقة أن الموجات الحرارية يمكن أن تكون متراكبة، في حين أن العيوب، وخاصة منها عموديا، يزعج هذا التراكب. وبهذه الطريقة، فإن الطريقة المعروضة تشبه طريقة خالية من الإشارة، متماثلة وحساسة جدا، حيث أنه من الممكن اكتشاف عيوب تحت سطحية اصطناعية بمعدل عرض / عمق أقل بكثير من 8 ، 9 . حتى الآن، كان من الصعب إنشاء اثنين من مراحل على مراحل موجة الحرارية توفير الطاقة الكافية. حققنا هذا ب(سم) إلى ليزر ديود عالي الطاقة، مما مكننا من دمج الطاقة الضوئية العالية لنظام الليزر مع القرار المكاني والزماني ل سلم (انظر الشكل 2 ) إلى جهاز عرض عالي الطاقة . يتم إنشاء حقول الموجة الحرارية الآن عن طريق تحويل فوتوثرمال اثنين من أنماط خط تشكيلها الجيبية المضادة على مراحل من خلال سطوع بكسل من الصورة المعروضة (انظر الشكل 2 ، الشكل 1A ). وهذا يؤدي إلى تسخين منظم لسطح العينة ويؤدي إلى حقول مداخلة حرارية مدمرة بشكل جيد. من أجل العثور على عيب تحت السطح، ويقاس اضطراب الاستدلال المدمرة كما تذبذب درجة الحرارة على السطح باستخدام كاميرا الأشعة تحت الحمراء.
أما مصطلح الموجة الحرارية، فقد نوقش على نحو مثير للجدل لأن الموجات الحرارية لا تنقل الطاقة بسبب الطابع المنتشر للانتشار الحراري. ومع ذلك، هناك سلوك مثل موجة عندما هي تينغ بشكل دوري، مما يسمح لنا باستخدام أوجه التشابه بين موجات حقيقية وعمليات الانتشار 10 ، 11 ، 12 . وهكذا، يمكن فهم موجة حرارية على أنها شديدة الانهيار في اتجاه الانتشار ولكن دورية مع مرور الوقت ( الشكل 1B ). طول الانتشار الحراري المميز  يتم وصفها من خلال خصائصها المادية (التوصيل الحراري k ، قدرة الحرارة ج ص وكثافة ρ )، وتيرة الإثارة ƒ. على الرغم من أن الموجة الحرارية تتحلل بقوة، ويمكن تطبيق طبيعتها موجة للحصول على نظرة ثاقبة خصائص العينة. وقد استخدم أول تطبيق لتداخل الموجة الحرارية لتحديد سماكة الطبقات. وعلى النقيض من أسلوبنا، استخدم تأثير التداخل في بعد العمق ( أي عمودي على السطح) ريف "> 13. توسيع فكرة التداخل إلى بعد ثان من خلال تقسيم شعاع ليزر، تم استخدام تداخل الموجة الحرارى لحجم العيوب تحت السطح 14. ومع ذلك تم تطبيق هذه الطريقة في تكوين الإرسال، وهو ما يعني أنه كان محدودا بسبب الاختراق وعمق الموجة الحرارية.وعلاوة على ذلك، ونظرا لأن مصدر ليزر واحد فقط قد استخدم، فإن هذه الطريقة تطبق تداخلات بناءة، مما يعني ضرورة وجود إشارة خالية من العيوب.وبصرف النظر عن فكرة استخدام التداخل بالموجات الحرارية، تم تنفيذ التدفئة التي تسيطر عليها زمنيا من قبل هولتمان وآخرون باستخدام شاشة عرض الكريستال السائل (لد) غير معدلة مع مصدر الضوء المدمج في، والتي كانت محدودة للغاية في انتاج الطاقة الضوئية 15. مزيد من النهج من قبل بريب و رافيتشاندران تهدف إلى زيادة البصرية انتاج الطاقة عن طريق اقتران أيضا ليزر إلى حركة تحرير السودان 16 ، s = "كريف"> 17.
يتم وصفها من خلال خصائصها المادية (التوصيل الحراري k ، قدرة الحرارة ج ص وكثافة ρ )، وتيرة الإثارة ƒ. على الرغم من أن الموجة الحرارية تتحلل بقوة، ويمكن تطبيق طبيعتها موجة للحصول على نظرة ثاقبة خصائص العينة. وقد استخدم أول تطبيق لتداخل الموجة الحرارية لتحديد سماكة الطبقات. وعلى النقيض من أسلوبنا، استخدم تأثير التداخل في بعد العمق ( أي عمودي على السطح) ريف "> 13. توسيع فكرة التداخل إلى بعد ثان من خلال تقسيم شعاع ليزر، تم استخدام تداخل الموجة الحرارى لحجم العيوب تحت السطح 14. ومع ذلك تم تطبيق هذه الطريقة في تكوين الإرسال، وهو ما يعني أنه كان محدودا بسبب الاختراق وعمق الموجة الحرارية.وعلاوة على ذلك، ونظرا لأن مصدر ليزر واحد فقط قد استخدم، فإن هذه الطريقة تطبق تداخلات بناءة، مما يعني ضرورة وجود إشارة خالية من العيوب.وبصرف النظر عن فكرة استخدام التداخل بالموجات الحرارية، تم تنفيذ التدفئة التي تسيطر عليها زمنيا من قبل هولتمان وآخرون باستخدام شاشة عرض الكريستال السائل (لد) غير معدلة مع مصدر الضوء المدمج في، والتي كانت محدودة للغاية في انتاج الطاقة الضوئية 15. مزيد من النهج من قبل بريب و رافيتشاندران تهدف إلى زيادة البصرية انتاج الطاقة عن طريق اقتران أيضا ليزر إلى حركة تحرير السودان 16 ، s = "كريف"> 17.
بروتوكول المعروضة هنا يصف كيفية تطبيق طريقة لبت لتحديد العيوب تحت السطحية موجهة عموديا على سطح عينات من الصلب. وهذه الطريقة في مرحلة مبكرة، لكنها قوية بما يكفي للتحقق من صحة النهج المقترح؛ ومع ذلك، فإنه لا يزال محدودا من حيث قوة الانتاج البصرية للتحقيق من الإعداد التجريبي. وبما أن زيادة الطاقة الانتاجية البصرية لا تزال تحديا، يتم تطبيق طريقة عرضت على الصلب المطلي يحتوي على تصريف كهربائيا الشقوق كهربائيا تشكيله. ومع ذلك، فإن أهم وأهم الخطوات للبروتوكول، وتوليد إضاءة منظمة متجانسة، وتلبية الشروط المسبقة لتدخل الموجة الحرارية المدمرة، وتحديد مكان العيب، لا تزال تعقد لمزيد من العيوب تطلبا كذلك. وبما أن الكميات الحاكمة هي طول الانتشار الحراري μ، يمكن تطبيق طريقة لبت على العديد من المواد المختلفة أيضا.
الإقليم الشمالي ">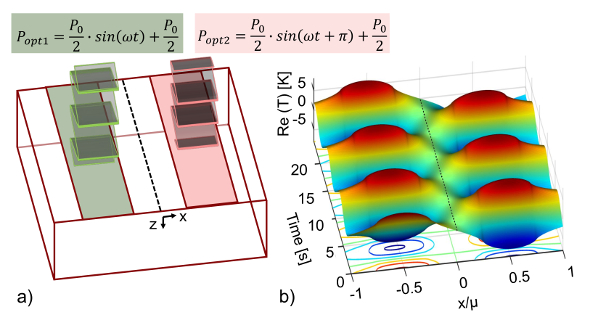
الشكل 1: مبدأ تأثير التداخل المدمر. ( أ ) تخطيطي لنمط الإضاءة المستخدم أثناء التجارب. العينة تسخن مكانيا وزمانيا من قبل اثنين من أنماط مضيئة دوريا مع تحول المرحلة من π. ويمثل الخط المتقطع خط التماثل بين كلا النمطين. وسوف يستخدم هذا الخط للتقييم باعتباره "خط استنزاف". ( ب ) رسم بياني للتناوب الحلقي بالتناوب المكاني والزمني على النحو المحسوب من الحل التحليلي لمعادلة التوصيل الحراري الحراري. ويظهر الموجات الحرارية المستجيبة لإضاءة (أ) مع إشعاعي للنمطين مع P = 1 = 1.5 W الخطيئة (2π 0.125 هرتز ر ) + 1.5 W و P اختيار 2 = 1.5 W الخطيئة (2π 0.125 هرتز t + π) + 1.5 واط للصلب الإنشائي ρ 3 ، c p = 461 J / (كغ · K)، k = 54 W / (m · K). لا يظهر المظهر الجانبي لدرجة الحرارة عند الخط المتقطع أي تذبذب حراري للمواد المتجانسة المتناحية. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.

الشكل 2: تخطيطي لمبدأ القياس من التدفئة منظم المستخدمة في الحرارة الحرارية. يتم تطبيق شعاع غاوس متجانس إلى ملف تعريف قبعة قبعة إلى مغير الضوء المكاني (سلم). وتقوم حركة سلم بحل الشعاع مكانيا من خلال عناصر قابلة للتحويل وزمن سرعة التحول. يمثل كل عنصر بكسل سلم. في هذه التجربة، و سلم هو جهاز مرآة صغيرة الرقمية (دمد). عن طريق تحوير سطوع بكسل A مع برنامج التحكم حتمية الوقت، سطح العينةيتم تسخينها بطريقة منظمة. في حالة التجربة المقدمة، نقوم بتعديل خطين مضادين للطور (مراحل: φ = 0، π)، وهما أصلان يتداخلان بشكل متناغم مع حقول الموجة الحرارية عند التردد الزاوي ω. تتفاعل حقول الموجة مع البنية الداخلية للعينة مما يؤثر أيضا على مجال درجة الحرارة على السطح. يتم قياس هذا عن طريق الإشعاع الحراري بواسطة كاميرا الأشعة تحت الحمراء منتصف الموجة. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
ملاحظة: الحذر: يرجى الانتباه إلى سلامة الليزر لأن الإعداد يستخدم فئة 4 الليزر. يرجى ارتداء النظارات الواقية الصحيحة والملابس. أيضا، التعامل مع الليزر الطيار مع الرعاية.
1. زوجين ليزر ديود إلى مجموعة تطوير العارض (بك)
- إعداد اللوح.
- قم بتجميع جميع األجهزة على اللوح مسبقا كما هو مبين في الشكل 3 . وضع اللوح مع جميع الأجهزة التي تم تجميعها مسبقا في مختبر ليزر.
- وضع الألياف الليزر جبل على اللوح.
- إرفاق الألياف إلى جبل الألياف الليزر ( راجع الشكل 3 ).
- تبديل مصراع وعتبة الليزر من ليزر الصمام الثنائي على. باستخدام بطاقة استشعار الأشعة تحت الحمراء عالية الطاقة، والتحقق من قطر الإخراج (40 مم) من شعاع. تبديل عتبة الليزر قبالة والليزر الطيار جرا. ضبط ارتفاع المحور البصري في جبل الألياف الليزر إلى مدخل بك باستخدامجاك مختبر ( انظر الشكل 4A، 4D ).
- نقل جبل الألياف الليزر على طول السكك الحديدية. مراقبة موقف الليزر الطيار على مسافة. لا ينبغي أن تتحرك نقطة مركزها. في حال كان ذلك، تحقق من جبل بين جاك مختبر وجبل الألياف الليزر. إصلاح الألياف الليزر جبل بعد ذلك.
ملاحظة: السكك الحديدية هي المرجع للمحور البصري وينبغي موازاة الانحياز إلى اللوح. يجب إزالة العدسات التليسكوبية مسبقا.
- ضبط التلسكوب.
- استخدام التلسكوب للحد من قطر شعاع من 40 ملم إلى 15 ملم لتناسب مدخل بك ( انظر الشكل 4A، 4D ). استخدام 200 ملم و 75 ملم عدسة محدبة بلانو عدسة الأولى والثانية، على التوالي. استخدام الليزر الطيار والمرور لوضع العدسة الأولى ( راجع الشكل 4B ).
- ضبط تقريبا المسافة بين كل من العدسات باستخدام حاكم الصلب. استخدام مرمى مرة أخرىلوضع العدسة للليزر الطيار. جبل العدسة الثانية على مرحلة الترجمة زي. استخدام المرحلة ل كوليمات شعاع.
- محاذاة العينات شعاع.
- ضرب (مع شعاع الليزر) العينات شعاع في زاوية 45 درجة. استخدام السكك الحديدية الثانية عمودي على الأول لوضع العينات شعاع.
مالحظة: يتم تبريد معظم الطاقة الضوئية بعيدا عن عداد الطاقة 500 واط. الإخراج البصري من ليزر الصمام الثنائي هو أكثر استقرارا في السلطة الكاملة، وهذا هو السبب في تقسيم الطاقة الضوئية تصل. - استخدام القزحية في وظيفة ثابتة الارتفاع للتحقق من مسار الطريق البصري على طول السكك الحديدية ( راجع الشكل 4A ) مع الليزر الطيار.
- ضرب (مع شعاع الليزر) العينات شعاع في زاوية 45 درجة. استخدام السكك الحديدية الثانية عمودي على الأول لوضع العينات شعاع.
- محاذاة المرآة.
- قبل محاذاة المرآة كما هو مبين في الشكل 4c ، إزالة بك ولوحته الأساسية. إصلاح السكك الحديدية الثالثة عمودي على الثانية. مرة أخرى، والتحقق من مسار بصري من قزحية العين.
ملاحظة: المسار البصري sهولد تكون محاذاة إلى اتجاه السكك الحديدية. يجب أن تكون موازية شعاع.
- قبل محاذاة المرآة كما هو مبين في الشكل 4c ، إزالة بك ولوحته الأساسية. إصلاح السكك الحديدية الثالثة عمودي على الثانية. مرة أخرى، والتحقق من مسار بصري من قزحية العين.
- تفكيك ووضع بك.
- قبل وضع بك 18 ، وإزالة محرك الضوء الأصلي.
ملاحظة: كان هناك اثنين من العدسات السابقة أصلا المصابيح المصابيح من بك 19 ( راجع الشكل 4D ، مدخل). يتم لصقها وتحتاج إلى إزالتها باستخدام الأسيتون. - محاذاة منصة بك ليكون موازيا للسكة الحديد الثالثة، وبالتالي إلى المحور البصري للحزمة. استخدام مرمى تعديلها إلى مدخل بك لوضع بك بالنسبة إلى الحزمة. البقاء متوازية الانحياز. تبديل الليزر الطيار قبالة، لأنه ضعيف جدا لتمرير بك.
- قبل وضع بك 18 ، وإزالة محرك الضوء الأصلي.
- مشروع صورة بيضاء من أجل التحقق من الطاقة الضوئية.
- تأكد من توصيل هدمي كابل و أوسب كابل من بك وكذلك الحصول على البيانات (داق) بطاقة إلىالتحكم بيسي. توصيل المنافذ في مربع التحكم بالليزر ل "مصراع الليزر"، "عتبة الليزر" و "الليزر على" إلى بطاقة داق. توصيل "الليزر السيطرة الجهد" ميناء الماسح الضوئي مربع التحكم إلى بطاقة داق.
- بدء تشغيل برنامج التحكم بك 20 وتكوينه كجهاز عرض عادي يتبع الخطوات من 1.1 إلى i.3 من الشكل 5B . تمكين الشاشة الثانية وتأكد من عدم وجود نافذة داخل الشاشة الثانية. استخدام خلفية سطح المكتب الأبيض والتحقق من وظيفة جهاز العرض مع ضوء فلاش ليد كمصدر ضوء المدخلات.
ملاحظة: إذا تم عرض صورة بيضاء على مستوى صورة بك، فإن الجهاز يعمل بشكل صحيح.
- تحقق من مدخلات الطاقة الضوئية.
- وضع رئيس السلطة متر 30 W تعلق على وحدة تحكم السلطة متر في المسار البصري أمام بك ( انظر الشكل 4E - موقف 1). تبديل ليزر الصمام الثنائيمع برنامج التحكم بالليزر لبت الذي يتبع الخطوات من 1 إلى 3 من الشكل 5 أ ) عند مستوى قدرة منخفض للخطوة i.1 = 0.5 V.
ملاحظة: برنامج التحكم بالليزر لبت يتحول بطاقة داق الذي يتحول مخرجات التحكم بالليزر ( راجع 1.7.1). النظر في سلامة الليزر، وارتداء النظارات والملابس الواقية! - تحقق من موقف الاستشعار السلطة متر مع ارتفاع الطاقة إر بطاقة الاستشعار. عقد بطاقة الأشعة تحت الحمراء في شعاع ومشاهدته توهج. تطابق قطر شعاع إلى منطقة استشعار السلطة متر ( الشكل 3 ).
- تحقق من الطاقة الإدخال البصري القصوى عند مدخل بك (مرة أخرى اتبع الشكل 5A )، الخطوة i.1) مع قيمة 10 V.
مالحظة: يجب أن تكون قدرة الدخل البصري عند مدخل بك على األقصى حوايل 22 واط 21 . في هذا التكوين، تم تسامح مرات القياس تصل إلى 5 دقائق دون تدمير حركة تحرير السودان، وهو في حالة بك أدركت كجهاز ميكروميرور الرقمية (دمد). - تحقق من انتاج الطاقة الضوئية.
- وضع رأس متر السلطة 30 W في مسافة تقريبية من 60 ملم إلى بك باستخدام أف = 60 مم عدسة تعلق على الهدف بك ( انظر الشكل 4E ).
- ضع مصباح الفلاش ليد عند مدخل جهاز العرض ( راجع الشكل 4 د ) وقم بتشغيله. قم بضبط موضع رأس عداد الطاقة بحيث يقوم بجمع ضوء الصورة المعروضة كما هو مبين في الشكل 4e . إزالة ضوء فلاش ليد بعد ذلك.
- بدء تشغيل برنامج التحكم بالليزر لبت. أدخل '0.5 V' في الحقل "الجهد" وانقر على "الليزر على!" زر. قراءة الطاقة الضوئية من وحدة التحكم متر السلطة. إيقاف الليزر عن طريق النقر على زر "إيقاف". كرر هذه الخطوات ل 2 V و 6 V و 10 V ( انظر الشكل 5 أ ، من 1 إلى 1..3).
ملاحظة: إذا كان الجهد من 10 V يوفر انتاج الطاقة البصرية من &# 62؛ 4 W، الاختبار الأولي ناجح. عدا ذلك، يجب التحقق من المحاذاة البصرية. في محاولة لتحقيق أقصى قدر من انتاج الطاقة الضوئية عن طريق ضبط بدقة المرآة.
- قياس الشخصية شعاع.
- استخدام الصمام الثنائي الصورة مع مكبر للصوت والثقب لقياس الشخصية شعاع من الصورة المتوقعة الناتجة ( راجع الشكل 4F ). إذا كان من الممكن الوصول إلى ملف تعريف شعاع، فاستخدم هذا الجهاز ولكن أضعف الشعاع.
- إرفاق الصمام الثنائي الصورة إلى مرحلة الترجمة التي هي نفسها شنت على قوس. أيضا نعلق محايدة الكثافة (ند) 1 تصفية عاكسة وثقب 1 ملم إلى الصمام الثنائي. وضع الصمام الثنائي الصورة على رأس مرحلة الترجمة الآلية والمقبس مختبر. للحصول على ارتفاع، استخدم لوحتي خبز (100 مم × 100 مم).
- استخدم عدسة أف = 100 مم بعد هدف بك ( انظر الشكل 4e ) وقم بعرض صورة بيضاء باستخدام ضوء فلاش ليد ( راجع الخطوة 1.7). نقل الصمام الثنائي الصورة إلى الطائرة صورة وتأكد من أن نطاق الصمام الثنائي للصور المتحركة في مرحلة الترجمة هو ضمن الصورة المعروضة ( انظر الشكل 4 و ).
- ربط الصمام الثنائي الصورة إلى إمدادات الطاقة وبطاقة داق. استخدام التضخيم 40 ديسيبل ل 6 فولت الجهد السيطرة لقوة الليزر الضوئية. قم بتوصيل وحدة تحكم الحركة لمرحلة الترجمة الآلية إلى جهاز التحكم.
ملاحظة: برنامج كثافة لبت تسيطر على حركة الصمام الثنائي صورة بينهولد من خلال منطقة مضيئة في سرعة ثابتة من = 0.1 مم / ثانية و يسجل إشارة الصمام الثنائي الصورة في 100 كيلو هرتز. يتم التحكم في الليزر أيضا عن طريق البرمجيات. - استخدام المسمار ميكرومتر من المرحلة في 1 ملم الخطوات كما هو مبين في الشكل 4F من أجل مسح الصورة. انظر النتائج المبينة في الشكل 6 أ -6 ب .
- احسب صورة التصحيح.
- من أجل تصحيح عدم التجانس في الملف الشخصي شعاع، حساب مصفوفة بكسل مقلوب فيما يتعلق شعاعالملف الشخصي. حدد نطاق الصورة المعروضة باستخدام خوارزمية الكشف عن الحافة.
- تحويل معلومات الوقت إلى المعلومات المكانية باستخدام سرعة المرحلة. تحويل المعلومات المكانية إلى نطاق البكسل ل بك مع x = 1،024 بكسل و y = 768 بكسل. تطبيع إشارة الصمام الثنائي إلى القيمة القصوى.
ملاحظة: تم اختيار المستوى المرجعي للتصحيح بمتوسط جميع قيم الصور المقيسة. ويحسب مستوى التوهين بما يلي:
P بكسل هو كثافة ديود تطبيع لكل بكسل. يتم تعيين قيم بكسل لك فوق 1 إلى 1. - مضاعفة مصفوفة التصحيح ( راجع الشكل 6 ج ) مع صورة بيضاء وقياس التشكيل الجانبي مرة أخرى للتأكد مما إذا كان التصحيح كافيا ( انظر الشكل 6 -6 ح).
2. إعداد العينة
- وضع رئيس السلطة متر 30 W تعلق على وحدة تحكم السلطة متر في المسار البصري أمام بك ( انظر الشكل 4E - موقف 1). تبديل ليزر الصمام الثنائيمع برنامج التحكم بالليزر لبت الذي يتبع الخطوات من 1 إلى 3 من الشكل 5 أ ) عند مستوى قدرة منخفض للخطوة i.1 = 0.5 V.
- استخدام كتلتين من 100 مم × 100 مم × 40 مم من الصلب الإنشائي ST37 كمواد العينة بكثافة ρ = 7،850 كغ م -3 والتوصيل الحراري ك = 54 م · م -1 · ك -1 ، والقدرة الحرارية من c p = 461 J · كغ -1 · K -1 .
- إدراج عيوب اصطناعية في كتلتين 0.25 مم، 0.5 مم، 0.7 مم، 1.25 مم و 1 مم، 1.5 مم، 1.75 مم، 2 مم عن طريق التفريغ الكهربائي بالقطع تحت السطح كما هو مبين في الشكل 7 .
- الشريط العيوب مع الشريط الواقي. ساندبلاست السطح العلوي من أجل الحصول على امتصاص متجانسة. الشريط العيوب مع الشريط الواقي قبل طلاء. إزالة دهون السطح باستخدام الأسيتون.
- معطف منطقة مضيئة مع رذاذ الجرافيت من 30 مم المسافة مرتين (0 ° و 90 درجة). الطلاء ناجح إذا كان هناك سطح متجانس. إذا كان طلاء ليست سليمة، بدء إزالة الشحوم وتنظيف مرة أخرى وتكرارخطوة الطلاء. تجفيف السطح ~ 2 ساعة. لا تلمس السطح، فإنه سيتم تغيير الانبعاثية.
- إزالة الشريط وتأكد من أن الجرافيت لا يدخل عيب تحت السطح.

3. إعداد التجربة
- إعداد بك وديود ليزر.
- مشروع صورة بيضاء كما هو موضح في الخطوة 1.7). تحقق من قوة المدخلات البصرية من بك كما هو موضح في الخطوة 1.8). تحقق من انتاج الطاقة البصرية من بك كما هو موضح في الخطوة 1.9).
- قم بتوصیل رأس متر الطاقة 500 واط بوحدة التحکم في عدادات الطاقة وقم بتوصیل عداد الطاقة بجھاز التحکم (بيسي) عن طریق کابل أوسب.
- إعداد وحدة تحكم الحركة ووضع العينة.
- توصيل وحدة تحكم الحركة إلى مرحلة الترجمة وإلى الكمبيوتر التحكم عن طريق كابل أوسب. وضع مرحلة الترجمة متعامد إلى المحور البصري على مسافة حوالي 80 ملم بالنسبة لك.
ملاحظة: لبت سوفتاره، تشغيل على جهاز التحكم يتحكم في وحدة تحكم الحركة. - إرفاق عدسة f = 100 ملم لهدف بك. استخدام ضوء فلاش ليد كمصدر ضوء المدخلات ( راجع الشكل 4D ، وممرات علامة على مدخل) إلى بك للعثور على طائرة صورة من العرض.
- وضع ورقة بيضاء على مسافة تقريبية من 100 ملم أمام الهدف ونقله ذهابا وإيابا للعثور على الطائرة من مستطيل مضاءة حادة، وهي طائرة الصورة.
- وضع سطح العينة المغلفة على هذا المستوى. تعيين ارتفاع العينة باستخدام جاك مختبر شنت على مرحلة الترجمة الخطية. اختيار ارتفاع بحيث الجزء العلوي من مستطيل مضيئة يضرب الجزء العلوي من العينة ( راجع الشكل 4G ). وضع الخلل الذي هو داخل مجموعة من منطقة مضيئة.
- صفر تحكم الحركة عن طريق تحويل الجهاز قبالة وعلى مرة أخرى.
- توصيل وحدة تحكم الحركة إلى مرحلة الترجمة وإلى الكمبيوتر التحكم عن طريق كابل أوسب. وضع مرحلة الترجمة متعامد إلى المحور البصري على مسافة حوالي 80 ملم بالنسبة لك.
- إعداد الكاميرا ووضع مرآة الذهب.
- استخدام ضوء فلاش ليد كمصدر ضوء المدخلات لجهاز العرض لعرض صورة بيضاء للعينة.
- وضع مرآة الذهب على ارتفاع بحيث يرى الحافة العليا للعينة ( الشكل 4G ). تعيين المرآة على زاوية حوالي 35 درجة كما هو مبين في الشكل 3 . وضع مرآة الذهب أقرب ما يمكن إلى الهدف بك ولكن لا التظليل الإسقاط.
ملاحظة: يتم إرفاق المرآة بوظيفة في حامل مشاركة مثبت. يتم إصلاح ارتفاع وموقف من قبل المشابك. - جبل الكاميرا إر إلى ترايبود. مستوى الكاميرا الأشعة تحت الحمراء مع مستوى بولسي. ضبط الكاميرا إر إلى ارتفاع الهدف بك. ضعه بحيث يرى الصورة البيضاء المتوقعة فوق مرآة الذهب.
ملاحظة: المسافة التقريبية على طول المسار البصري حوالي 1 متر. - استخدام حلقة فاصل بين هدف الكاميرا الأشعة تحت الحمراء وكاميرا الأشعة تحت الحمراء. يصنعتأكد من أن المدخلات الزناد للكاميرا متصلا بطاقة قياس البيانات الحصول على من أجل تحريك الإطار الاستيلاء. أيضا، توصيل الأشعة تحت الحمراء كاميرا مراقبة الكمبيوتر إلى كاميرا الأشعة تحت الحمراء عبر كابل لان.
- قم بتشغيل الكاميرا وانتظر على الأقل لمدة الاحماء ( حوالي 30 دقيقة).
- بدء إر برنامج مراقبة الكاميرا. تغيير عنصر شريط القائمة إلى "كاميرا". انقر فوق الزر "توصيل" لتوصيل كاميرا الأشعة تحت الحمراء ( انظر الشكل 8 أ ، الخطوة 1).
مالحظة: تعرض الكاميرا صورة حية للمشهد. - انقر فوق الزر "ريموت" لفتح اللوحة "ريموت كونترول" ( راجع الشكل 8d ، الخطوة i.2). اختيار المعايرة "هف 100MM (-10 درجة مئوية - 60 درجة مئوية) 1140 μs". انظر الشكل 8d ، الخطوة i.2.1.
ملاحظة: يجب أن يكون نطاق المعايرة صغيرا قدر الإمكان من أجل تقليل الضوضاء. - ضبط حلقة التركيز العدسة يدويا لتركيز الكاميرا الأشعة تحت الحمراء لثه عينة الطائرة.
ملاحظة: من المهم أن مجال الكاميرا من وجهة نظر كبيرة مثل المنطقة المتوقعة القصوى من أجل الحصول على القرار المكاني القصوى ( راجع الشكل 4G ). قد يضطر المرء إلى تغيير موضع، وارتفاع واتجاه كاميرا الأشعة تحت الحمراء. من أجل تقرير ما إذا كانت الصورة حادة، واحد يحتاج إلى تباين درجة الحرارة على مستوى الصورة. ويمكن استخدام حاكم الصلب لتوليد التباين. إذا كانت صورة الأشعة تحت الحمراء لا تزال منخفضة التباين، يمكن للمرء أن ضبطه باستخدام أداة التحديد ( انظر الشكل 8 ج ، ط .3) - إجراء تصحيح غير موحد عن طريق النقر على زر "مجلس التوحيد الوطنى" ( انظر الشكل 8 د ، الخطوة ط 2.2). تغطية الهدف كاميرا الأشعة تحت الحمراء وانقر على زر "موافق".
- تحديد العلاقة بين نطاق بكسل كاميرا الأشعة تحت الحمراء والإحداثيات العرض.
- تحديد العلاقة بين نطاق بكسل بك، ونطاق بكسل كاميرا الأشعة تحت الحمراء و ليمقياس نغغ من العينة عن طريق إسقاط صورة بيضاء أو نمط إلى سطح العينة ( راجع الشكل 4 ز، ح ). قياس المساحة المتوقعة باستخدام حاكم الصلب الذي يعطي العلاقة بين المجال بك وطول نطاق العينة.
- استخدام عدسة f = 100 مم تعلق على الهدف بك من أجل الحصول على منطقة مضيئة من 21.3 مم × 16 مم (4: 3).
ملاحظة: مقياس الطول في إحداثيات بك هو: 1 بكسل المتوقع = 21.3 مم / 1،024 بكسل - العثور على العلاقة بين بك وكاميرا الأشعة تحت الحمراء. كرر الخطوة 1.9.3) لمدة 10 V.
- استخدام برنامج الكاميرا إر لتغيير عنصر شريط القائمة إلى "قياس". اختر "أداة الصليب" من شريط أدوات "قياس المناطق" ( راجع الشكل 8 ج )، الخطوة ط 4.). بمناسبة زوايا الصورة الحرارية الناتجة عن طريق النقر الأيسر على الإطار هو مبين.
- انقر بزر الماوس الأيمن على الصليب للوصول إلى نافذة الملكية. تغيير إلى "إحداثيات" وتسجيلها لوالتحول في وقت لاحق من الصورة الحرارية لنظام تنسيق بك.
4. تنفيذ التجربة
- إعداد التجربة.
- تقدير منطقة الإضاءة نسبة إلى مقياس طول العينة.
- استخدم العدسة f = 100 مم للحصول على منطقة مضيئة من 5.5 مم × 16 مم لكل نمط. اختر مساحة 5.5 مم × 16.5 مم بينهما لا تكون مضيئة.
ملاحظة: الإشعاعات الناتجة حوالي 1.2 W / سم ².
- استخدم العدسة f = 100 مم للحصول على منطقة مضيئة من 5.5 مم × 16 مم لكل نمط. اختر مساحة 5.5 مم × 16.5 مم بينهما لا تكون مضيئة.
- تقدير منطقة الإضاءة في وحدات بالنسبة لنطاق بكسل بك.
- تحويل موقف نمط مضيئة إلى مجال بكسل بك (1،024 بكسل × 768 بكسل) باستخدام المعادلة في الخطوة 3.4.2). استخدام [(512، 1)؛ (512، 768)] في نطاق بك كخط استنزاف، وهو متماثل بين كلا النمطين.
- حساب إجمالي عدد الإطارات، وقياس الوقت والإطارات بيr. وبافتراض سرعة قدرها v = 0،05 مم / s، تبلغ مسافة مسير مسافة x = 10 مم ومعدل رتل بك ƒ r = 40 هز، تحسب زمن القياس t عبر t = x / v = 200 s. أيضا، حساب عدد الإطارات لا ƒ = ƒ r • t = 8،000. مع تردد إثارة ƒ = 0.125 هز، يحسب الأطر لكل فترة p مع p = نو ƒ / t ƒ = 320 لقطة / فترة.
ملاحظة: سيتم استخدام هذه القيم لإنشاء الصور المعروضة. - تحقق من الإعداد والتأكد من أن نظام الليزر، وكاميرا الأشعة تحت الحمراء و (اختياريا) يتم التحكم في درجة الحرارة إلى بطاقة داق. تحقق ما إذا كان متر الطاقة 500 W، بك والمرحلة الخطية متصلة بيسي التحكم.
- تقدير منطقة الإضاءة نسبة إلى مقياس طول العينة.
- قم بإعداد بيسي التحكم في الكاميرا.
- تكوين برنامج مراقبة الكاميرا إر للاستيلاء على الإطار عندما يتلقى كاميرا الأشعة تحت الحمراء مدخلات الزناد. لهذا، sالساحرة إلى لوحة "كاميرا" وانقر على زر "عن بعد" ( راجع الشكل 8A ، الخطوة i.2) لفتح لوحة التحكم عن بعد. اختيار "عملية إو" من القائمة المنسدلة ( الشكل 8D ، الخطوة i.2.3) وتمكين "مزامنة في" و "بوابة" وإغلاق القائمة.
- افتح قائمة الاستحواذ بالنقر في الزاوية السفلية اليمنى من علامة التبويب "معلمات الاستحواذ" ( انظر الشكل 8 أ ، ط 5). اختر "إكست / سينك" من القائمة المنسدلة ( راجع الشكل 8b ، i.5.1). قم بتسمية القياس عن طريق إدخال أسماء الملفات والمجلدات في حقل "المجلد" (انظر الشكل 8 ب ، i.5.2).
- أدخل رقم الإطار الكلي المحسوب من الخطوة 4.1.3 في حقل "العد" ( راجع i.5.3). إغلاق القائمة الاستحواذ وانقر على زر "تسجيل" لبدء الحصول على بيانات الكاميرا الأشعة تحت الحمراء ( راجع الشكل 8 ، i.6).
ملحوظة:التسجيل فقط سوف يحدث إذا كان هناك إدخال الزناد من بطاقة داق.
- إجراء التجربة.
- بدء تشغيل برنامج التحكم لبت. هل تريد تنشيط وحدة تحكم الحركة بالنقر على "تنشيط؟" زر ( الشكل 9 أ ، ط 1). قم بتعيين معلمات السفر "ستارتبوسيتيون" = "-5 مم"، "إندبوسيتيون" = "5 مم" و "فيلوسيتي" = "0.05 مم / s" عن طريق تحرير الحقول المسماة المقابلة كما هو مبين في الشكل 9 أ ، انقر فوق الزر "بدء القياس" (انظر الشكل 9 أ ، ط .2).
ملاحظة: في حالة عدم وضوح مكان وجود العيب، اختر مسافة سفر أكبر بسرعة أعلى. إيلاء الاهتمام لزيادة درجة الحرارة من بك، وكمية من البيانات التي تم إنشاؤها. لاحظ أن واجهة المستخدم لتوليد صور الإطار ستظهر ( انظر الشكل 9 ب ). - توليد الصور الإطار المتوقع. <رأ>
- انقر بزر الماوس الأيمن على الحقل "اختيار منطقة اللون". اختيار لون للمنطقة نمط من الحوار اللون ( الشكل 9 ، i.3). اختر "أداة المستطيل" من شريط أدوات الرسم في الركن العلوي الأيمن.
- رسم مستطيل على منطقة الصورة عن طريق النقر الأيسر وعقد بينما تمتد على منطقة الصورة. استخدم إحداثيات النمط المحول من الخطوة 4.1.2) لحجم إحداثيات المستطيل الظاهرة في الزاوية السفلية اليسرى (i.4). انقر على زر "تحديد المنطقة" ( الشكل 9B ، i.5).
ملاحظة: إحداثيات البكسل المحسوبة في نطاق بك لحجم نمط 5.5 مم هي: المستطيل 1 (x1 = 116، y1 = 1؛ x2 = 380، y2 = 768)، المستطيل 2 (x1 = 644، y1 = 1؛ x2 = 908، y2 = 768). بعد النقر فوق الزر "تحديد المنطقة"، سيظهر مربع حوار لتحديد خصائص النموذج.
- بدء تشغيل برنامج التحكم لبت. هل تريد تنشيط وحدة تحكم الحركة بالنقر على "تنشيط؟" زر ( الشكل 9 أ ، ط 1). قم بتعيين معلمات السفر "ستارتبوسيتيون" = "-5 مم"، "إندبوسيتيون" = "5 مم" و "فيلوسيتي" = "0.05 مم / s" عن طريق تحرير الحقول المسماة المقابلة كما هو مبين في الشكل 9 أ ، انقر فوق الزر "بدء القياس" (انظر الشكل 9 أ ، ط .2).
- تعيين خصائص نمط ( الشكل 9C ، i.6).
- اختر "موجة جيبية" منالقائمة المنسدلة باليسار انقر على الحقل "نوع الإشارة". تحديد معلمات التذبذب من خلال تعيين الحقول "المرحلة التحول" إلى "0 °"، "التردد" إلى "0.125 هرتز" و "السعة" إلى "127" (المرحلة التحول 0 للنمط الأول وطور المرحلة من π ل الثاني).
- تعيين الجهد الليزر إلى 10 V عن طريق إدراج "10" إلى الحقل "الجهد". لصق 320 إلى حقل "صور / فترة" باستخدام القيمة من الخطوة 4.1.3). اضغط على زر "التالي". هذا يغلق لوحة.
ملاحظة: يحسب برنامج التحكم لبت تيار صورة دورية عند دقة بك. كما بكسل أبيض يعني الحد الأقصى للطاقة الضوئية وبكسل أسود قوة الصفر، يتم حساب اثنين من أنماط تتأرجح. يتم حساب القيمة الرمادية للنمط الأول مع P 1 = 127 سين (2π 0.125 هز t ) + 127 و الثانية مع P 2 = 127 سين (2π 0.125 هز t+ π) + 127 (انظر الشكل 2 ، الرسم البياني)، في حين أن الوقت t محجوز لمعدل الإطار المختار ( راجع الخطوة 4.3.4).
- إنشاء النمط المتوقع الثاني.
- كرر الخطوات 4.3.2) و 4.3.3) بعد سير العمل في الشكل 9 ولكن مع لون مختلف و "التحول المرحلة" مختلفة من "180 درجة". انقر على زر "كالك فريمس" لحساب الأنماط المتوقعة. تعيين بك ومعدل إطار الكاميرا إر لتكون "40 هرتز" في مربع الحوار برزت حتى.
- تحميل صورة التصحيح.
- اتبع سير العمل من الشكل 9B )، الخطوة i.12. اختيار لوحة "تصحيح الحمل"، وتوفير ملف للصورة المحسوبة من الخطوة 1.11). تحميل صورة التصحيح عن طريق النقر على الزر.
- بدء القياس عن طريق النقر على زر "ابدأ" ( راجع الشكل 9b ، الخطوة i.13).
ملاحظة: سيتم عرض الإطارات المحسوبة على العينة في حين أن المرحلة تتحرك. سيتم الحصول على الإطارات وتحسب من قبل برنامج مراقبة الكاميرا الأشعة تحت الحمراء. - وقف القياس عند الحصول على جميع الإطارات (شريط التقدم = 100٪) عن طريق النقر على زر "إيقاف القياس" ( انظر الشكل 9 أ ، i.14).
ملاحظة: سوف تتغير تسمية الزر إذا تم النقر عليها.
5. بعد عملية ملف البيانات
- بدء تشغيل البرنامج بعد المعالجة لبت. انقر على زر "تحميل" واختر ملف القياس في مربع الحوار ملف. انقر فوق "موافق" لتحويل نسق بيانات الكاميرا إلى نسق بيانات ما بعد المعالجة ( انظر الشكل 10 أ ).
ملاحظة: يتم تخزين البيانات كاميرا الأشعة تحت الحمراء في إر كاميرا مراقبة الكمبيوتر في شكل أصلي. يتم استخدام مجموعة تطوير برامج التحكم في الكاميرا إر لتحويل تسلسل الكاميرا إر إلى مصفوفة ثلاثية الأبعاد (بكسل X، بكسل Y، رقم الإطار) ورأس بما في ذلك متجه توقيت t. - تحويل بيانات الكاميرا إر إلى مجال بك ( انظر الشكل 10 ب )، عن طريق إدراج إحداثيات نقاط الإسقاط الأربعة P1x إلى P4y من الخطوة 3.4.3)، والنقر على "تحويل".
ملاحظة: نظرا لإسقاط الصورة عن طريق مرآة الذهب إلى كاميرا الأشعة تحت الحمراء ( راجع الشكل 4G )، وتشوه صورة الأشعة تحت الحمراء الناتجة. يتم إجراء تحول هندسي أفيني من نطاق كاميرا الأشعة تحت الحمراء لنطاق بك. والنتيجة هي مصفوفة من حجم 1،024 × 768 × عدد الإطار. - استخراج معلومات درجة الحرارة على خط استنزاف ( راجع الشكل 10C ).
- حدد خط الاستنفاد بنقطتين L1 و L2 عن طريق ملء الحقول L1x = Lx2 = "512" بكسل كما تم اختياره بالفعل في الخطوة 4.1.2). اختر y من L1y = "343" إلى L2y = "393". انظر الشكل 10 ج .
ملاحظة: نظرا للتحول في الخطوة 5.2)، يمكن أن تكون البياناتاسترجاعها على الفور، ولكن تحدث آثار جانبية لأن العينة هو فقط مضاءة جزئيا. لذلك، لا تقم بتقييم مناطق حافة الأنماط. إذا كان الضجيج لا يزال مرتفعا جدا، يمكن زيادة حجم y. - قم بتعيين المعلمات التجريبية لكاميرا الأشعة تحت الحمراء عن طريق ملء الحقول التالية: فرامريت ك "40" هز، التردد ك "0.125" هز، السرعة v ك "0.05" مم / s وموقف البدء ستستارت ب "-5" مم ( cf. الشكل 10 ج ). تعيين المعلمات للمعالجة بعد البيانات: "تناسب درجة" = "7"، "تمهيد" = "20"، و "هيلبرت" = "500" كما هو الحال في الشكل 10C .
ملاحظة: البيانات المستخرجة في خط استنفاد متوسط هندسيا. بعد ذلك، يتم استرجاع درجة الحرارة بالتناوب Δ T (انظر الشكل 11 أ، ب ) من خلال تنفيذ صالح متعدد الحدود (درجة تناسب). ويتم تمهيد الإشارة الناتجة بواسطة مرشح متوسط متحرك (تمهيد).وأخيرا، يتم تطبيق التحول هيلبرت لاسترداد السعة لحظية. يتم تطبيق مرشح متوسط متحرك آخر (هيلبرت) من أجل تقليل التموجات المتبقية. باستخدام المعلومات على الحد الأدنى السعة، يتم الحصول على موقف الخلل الخفي. - انقر على "تقييم" لإجراء تحليل البيانات. قراءة موقف محسوب من عيب من حقل "كراكبوسيتيون [مم]"، ويظهر موقف عيب في إطار الشكل 10D .
- حدد خط الاستنفاد بنقطتين L1 و L2 عن طريق ملء الحقول L1x = Lx2 = "512" بكسل كما تم اختياره بالفعل في الخطوة 4.1.2). اختر y من L1y = "343" إلى L2y = "393". انظر الشكل 10 ج .

الشكل 3: صورة من الإعداد التجريبي مع مسار بصري أبرز (الخط الأحمر). ويرتبط جبل الألياف الليزر إلى الألياف من ليزر الصمام الثنائي. يتم ضبط شعاع بواسطة التلسكوب إلى قطر مدخل بك. قبل دخول بك، يتم تقسيم شعاع بواسطة عينات شعاع ورصدها من قبل السلطة متر. داخل بك، شعاع متجانسة أومن المتوقع أن دمد. و بدم، التي تسيطر عليها برامج التحكم لبت، مشاريع أنماط الإضاءة للعينة. يتم تحويل ضوء المتوقع فوتوثرمالي وتسخن العينة. يتم قياس درجة الحرارة بواسطة كاميرا الأشعة تحت الحمراء عن طريق الإشعاع الحراري (الخط البرتقالي) المنبعثة من سطح العينة. يتم وضع العينة نفسها على مرحلة الترجمة الخطية. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.

الشكل 4: تسلسل الصورة تظهر تعديل الإعداد التجريبية. ( أ ) عرض أعلى من الإعداد التجريبي يظهر لمحة عامة. ( ب ) محاذاة التلسكوب: يستخدم المرمى في تركيز العدسة على المحور البصري لحزمة الليزر. ( ج ) محاذاة العناصر البصرية: تركيب نظام بارد إلى مقاعد البدلاء البصرية لمواءمة شعاع الضوئية نسبة إلى مقاعد البدلاء. ويستخدم ارتفاع قزحية الثابتة للحفاظ على مواز شعاع إلى مقاعد البدلاء. ( د ) صورة للرؤية الجانبية لنقطة التوصيل بين العرض والحزمة. يتم استخدام مرمى لمحاذاة جهاز العرض إلى شعاع. ( ه ) تحدید انتقال جھاز العرض: یتم استخدام عداد الطاقة لقیاس الطاقة البصریة قبل وبعد جھاز العرض. ( و ) تحديد المظهر الجانبي للحزمة: يتم تركيب الفلتر الثنائي و ND1 على الصمام الثنائي الذي يتم نقله عبر مرحلتين خطيتين من خلال الصورة المعروضة. يجب تهيئة جهاز العرض لعرض صورة بيضاء. ( ز ) تحديد موقع كاميرا الأشعة تحت الحمراء للعينة عبر مرآة ذهبية: يجب وضع العينة في مستوي صورة جهاز العرض. من أجل السيطرة على كثافة الطاقة، والهدف والعدسات الإضافية المرتبطة الهدف يمكن استخدامها. ( ح ) التحديدمن حجم بين الصورة المتوقعة، إر صورة الكاميرا والطول الفعلي للعينة. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.

الشكل 5: لقطات البرامج. ( أ ) لقطة من برنامج التحكم بالليزر لبت. ( ب ) برمجية التحكم بك: توضح الخطوات من 1 إلى 1 من المعيار i.3 كيفية تكوين بك كجهاز عرض عادي. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.

الشكل 6: تصحيح التشكيل الجانبي للحزمة غير المتجانسة. ( أ ) صورة موجية للصورة البيضاء المتوقعة (إضاءة كاملة) مأخوذة من a الصورة الصمام الثنائي الذي تم نقله من خلال الملف الشخصي. وتظهر البيانات لمحة شعاع غير متجانسة مع ذروة بارزة في الوسط. ( ب ) السطر الجانبي للمقطع العرضي المقابل للخط الأحمر في أ). ( ج ) صورة التصحيح التي تكون مضافة على حركة تحرير السودان مع الصورة البيضاء المتوقعة من أجل تقليل مستوى التجانس. ( د ) السطر الجانبي المقابل للمقطع العرضي للخط الأحمر في ج). ( ه ) المظهر الجانبي للحزمة الناتجة بعد التصحيح الذي يبين صورة أقرب إلى المظهر الجانبي للغطاء العلوي. ( و ) السطر الجانبي المقابل للمقطع العرضي للخط الأحمر في ه). ( ز ) لمحة الإضاءة من نمطين تصحيحها. وسيتم تشكيل الأنماط بنفس التردد والاتساع ولكن مع المراحل المتعارضة إنشاء منطقة من التداخل المدمر بين الأنماط. ( ح ) المظهر الجانبي المقابل للمقطع العرضي للخط الأحمر في g). ve.com/files/ftp_upload/55733/55733fig6large.jpg "تارجيت =" _ بلانك "> الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.

الشكل 7: إعداد العينات. ( أ ) صورة من سطح العينة تظهر كتلة من الصلب البني المغلفة الأسود ST37 (20 مم × 0.5 مم × 15 ملم). ( ب ) رسم كاد شفاف للعيوب تحت السطحية. وتقع العيوب 40 ملم من الجانب الأيمن. ( ج ) صور عرض جانبي للعينات تبين العيوب المثالية في أعماق مختلفة تحت السطح (الجانب 1 = 0.25 مم، الجانب 2 = 0.5 مم، الجانب 3 = 0.7 مم، الجانب 4 = 1.25 مم). جوانب العينة غير مطلية من أجل الحد من الخسائر الحرارية. العينة الثانية (غير مبينة) لها عيوب تحت سطحية في: الجانب 1 = 1 مم، الجانب 2 = 1.5 مم، الجانب 3 = 1.75 مم، الجانب 4 = 2 مم.= "_ بلانك"> الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.

الشكل 8: لقطات من برنامج مراقبة الكاميرا إر. الخطوات من i.1 إلى i.5 تبين كيفية تكوين كاميرا الأشعة تحت الحمراء للحصول على البيانات. ( أ ) لقطة من لوحة "الكاميرا": كاميرا إر يمكن توصيلها إلى إر كاميرا مراقبة الكمبيوتر عن طريق زر "الاتصال". يمكن الوصول إلى لوحة التحكم "عن بعد" (ب) و لوحة الاستحواذ (d & e) من هنا. وعلاوة على ذلك، يمكن بدء القياس عن طريق زر "تسجيل". ( ب ) لقطة شاشة للوحة "الاستحواذ": یجب تکوین کامیرا الأشعة تحت الحمراء عبر "إكست / سينك" من أجل التقاط إطار إذا تلقت مشغل تل 5 V. ( ج ) لقطة من لوحة "قياس": يمكن تعديل نطاق عرض البيانات بواسطة زر "التحديد". أدوات النقطة والخطتستخدم لمعايرة صورة الكاميرا إر إلى إحداثيات العالم الحقيقي. ( د ) لقطة من الأشعة تحت الحمراء كاميرا التحكم عن بعد "المعايرة" لوحة. وهناك مجموعة قياس صغيرة (-10 إلى 60 درجة مئوية) يجب أن يتم اختيارها من أجل تحقيق حساسية عالية. ( ه ) كاميرا الأشعة تحت الحمراء للتحكم عن بعد لوحة: "عملية إو"، "IN1" و "IN2" يجب أن تكون ممكنة من أجل تحريك الكاميرا الأشعة تحت الحمراء. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.

الشكل 9: لقطات من برنامج التحكم لبت. يتم وضع علامة سير العمل لتفاعلات المستخدم مع البرنامج كخطوات i.1 إلى i.14. ( أ ) لقطة من اللوحة الرئيسية لبت؛ "مفعل؟" هو نوع منطقي وينشط المرحلة إذا كان صحيحا. "Start-" و "إندبوسيتيون "هي معلمات السفر للمرحلة بالميليمتر، ويعرف الحقل" السرعة "بالميليمتر / ثانية، ويبدأ الزر" قياس البداية "القياسات، ويفتح مربع الحوار الموضح في اللوحة (ب) ويوقف القياس إذا كان كاذبا. ( ب ) لقطة من واجهة المستخدم المستخدمة في إنشاء الأنماط المسقطة للعينة، ويتم اختيار لون لتمثيل منطقة بكسل، ويتم اختيار المنطقة عن طريق رسم مستطيلات للصورة.إذا تم الضغط على الزر "تعريف المنطقة" فإن اللوحة المعروضة في اللوحة (c) سوف يطفو على السطح لتحديد خصائص المنطقة، وبعد تحديد جميع المناطق، فإن زر "كالك إطارات" حساب مجموعة من الصور. "تصحيح تحميل" سيوفر مربع حوار لتحميل التصحيح إيماج لتجنب وجود صورة موجزة غير متجانسة، سيبدأ الزر "ستارت" في القياس. ( ج ) لقطة من واجهة المستخدم المستخدمة لتعيين خصائص نمط واحد، ويعرض الإطار العلوي نوع الإشارة (موجة جيبية)في درجات وتردد في هرتز. الإطار السفلي يظهر إطارات لكل فترة، السعة من 1 إلى 127 والجهد الليزر (0 V إلى 10 V = 0 W إلى 500 W). الأطر لكل فترة هي القيمة التي تمثل مدى الدقة في تحديد الفترة. بعد الضغط على زر "التالي" (مزيد من)، مربع الحوار للملوثات العضوية الثابتة ويطلب معدل إطار الكاميرا في هرتز وسرعة تبديل الإطار في هرتز. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.

الشکل 10: لقطات من برمجیات ما بعد المعالجة لبت. ( أ ) تحميل وتحويل تنسيق بيانات الكاميرا إر الأصلي. ( ب ) تحويل مصفوفة الإطار إلى نظام إحداثيات العرض باستعمال نقاط التحول P1x إلى P4y. ( ج ) يمثل L1x إلى L2y إحداثيات البكسل للخط الذي تم تقييمه. و# 34؛ v "و" ستارت "و" فريمريت "و" فريكونت "هي معلمات تجريبية." v "هي السرعة في مم / s،" ستستارت "موضع البداية للمرحلة مم،" فرامريت "و" التردد "تم الحصول عليها في هرتز" درجة تناسب "،" تمهيد "و" هيلبرت "هي معايير التقييم درجة تناسب يمثل درجة تناسب متعدد الحدود،" تمهيد "يمثل عدد العناصر لمرشح المتوسط المتحرك المستخدمة للحد من الضوضاء و يتم استخدام المعلمة "هيلبرت" لتعيين مستوى التمهيد للعثور على الحد الأدنى من المنحنى ( د ) لقطة من النتيجة تظهر موقف الكراك كخط عمودي منقط الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
بعد البروتوكول، تم اختيار الجانب 1 من عينة الصلب مع عيب تحت السطح على عمق 0.25 ملم لتوليد نتائج تمثيلية. تم وضع العيب في البداية تقريبا في وسط المنطقة المضيئة. ثم تم نقل العينة من -5 ملم إلى 5 ملم عبر المرحلة الخطية بسرعة 0.05 مم / ثانية. باستخدام هذه المعلمات، ويبين الشكل 11A بيانات المسح بعد استخراجها من خط استنزاف. في هذه المرحلة، يمكن تقدير نجاح التجربة، حيث تتوفر البيانات الأولية من برنامج التحكم في كاميرا الأشعة تحت الحمراء كمعاينة (اختياري: استخدم أداة الخط لمعاينة البيانات، راجع الشكل 8 ، الخطوة 1.4) . بعد مزيد من إشارة مرحلة ما بعد المعالجة، ويبين الشكل 11B موقف عيب في الحد الأدنى من منحنى هيلبرت (الأزرق) في 0.3 ملم.
للتحقق من التجربة، يجب أن يكون المنحنى hأفي الخصائص التالية: يجب أن تكون متناظرة، يكون الحد الأدنى وضوحا في الطائرة التناظر واثنين ماكسيما متساوية إلى اليسار واليمين. وينشأ الحد الأقصى لأن تدفق الحرارة من أحد مصادر الخط يهيمن على الآخر بسبب تراكم الحرارة عند العيب. هذا هو الحال بشكل خاص عندما يتم وضع عيب على مقربة من طائرة التماثل. يشكل العيب حاجزا لتدفق الحرارة حتى نتمكن من مراقبة تدفق الحرارة من المصدر المهيمن وانعكاسه من العيب. إذا تم وضع الخلل بشكل متناظر في الوسط، فإن تدفق الحرارة ينقسم على قدم المساواة، مما يؤدي إلى الحد الأدنى 1 .
يظهر تأثير سرعة المسح الضوئي في الشكل 11C . هنا، تم مضاعفة سرعة المسح الضوئي إلى 0.1 مم / ثانية لتقييم نفس العيب. قبل ذلك، تم تحويل العينة قليلا على المسرح من أجل الحصول على موقف نسبي مختلف. تم تحديد موضع الخلللتكون -2 ملم. كان مستوى استطالة مماثلة للبيانات المبينة في الشكل 11A، مما يدل على استنساخ جيدة من التجربة، ولكن مع عدد أقل من التذبذبات. منذ استطالة القصوى يرتبط مع عمق الخلل، ويمكن الحفاظ على معلومات عن الموقف وعمق كذلك 1 .
ويبين الشكل 11 د مجموعة بيانات دون المستوى الأمثل. وكان العيب 1 مم تحت السطح، وهو تقريبا في حد الكشف عن هذا طول الانتشار والطاقة البصرية المتاحة. وعلى الرغم من أنه لا يزال من الممكن تحديد موقع العيب، فإن عدم التيقن في القياس أكبر لأن موقع التذبذب الصفر يتأثر بالفعل بالضوضاء. من هذا السلوك، يمكننا أن نستنتج أن العلامات الأكثر وضوحا لفشل تجربة الكشف عن العيب هي إذا كان خط استنزاف يتلاشى تماما أو إذا كان هناك سلوك غير متناظرة قوية. هذا يمكن أن يكون راجعا إلى فولو(1) أن القرار المكاني للكاميرا إر غير كاف ولا يمكن حل خط الاستنفاد بشكل صحيح، (2) ضجيج الكاميرا مرتفع جدا بالمقارنة مع ارتفاع درجة الحرارة، (3) نمط الإضاءة هو غير المتجانسة ولم يتم تصحيحها بشكل صحيح، (4) سرعة المرحلة المختارة مرتفعة جدا، بالمقارنة مع تردد التشكيل لنمط الإضاءة، و (5) طول الانتشار الحراري (عن طريق تردد التشكيل) لا يتكيف مع العيب عمق.

الشكل 11: مجموعة بيانات ممثل من التجارب لتحديد العيوب تحت السطحية. ( أ ) بيانات تجريبية تمثيلية من عينة ST37، الجانب 1 مع عيب في عمق 0.25 ملم. يظهر الخط الأسود معلومات درجة الحرارة مع مرور الوقت (أعلى محور). من خلال ترجمة المرحلة بسرعة v = 0.05 مم / ثانية، فإن الموقف هواسترجاع (المحور السفلي). المنحنى الأحمر يظهر تناسب متعدد الحدود (7 درجة) المستخدمة للحصول على عنصر درجة الحرارة بالتناوب. ويمثل الخط الأحمر المتقطع موضع العيب تحت السطح. ( ب ) يظهر المنحنى الأسود الرسم البياني لدرجة الحرارة بالتناوب الذي يتم الحصول عليه بطرح احتمالات متعددة الحدود من بيانات درجة حرارة اللوحة (أ). تم الحصول على المنحنى الأزرق من خلال تطبيق التحول هيلبرت إلى منحنى أسود ومتوسط. ( ج ) البيانات التجريبية الممثل من نفس الجانب على مدى من -7 ملم إلى 3 ملم في سرعة المرحلة من 0.1 ملم / ثانية. تردد النصف ولكن الاستطالة مشابه للوحة (أ). ( د ) البيانات التجريبية الأمثل المكتسبة عندما كان عيب تحت السطحية على عمق 1 ملم. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
يصف بروتوكول المقدمة كيفية تحديد العيوب تحت السطح الاصطناعي الموجهة عمودي على السطح. والفكرة الرئيسية من هذه الطريقة هي خلق حقول الموجة الحرارية المتداخلة التي تتفاعل مع عيب تحت السطح. أهم الخطوات هي (1) الجمع بين حركة تحرير السودان مع ليزر الصمام الثنائي من أجل إنشاء اثنين من أنماط الإضاءة عالية الطاقة بالتناوب على سطح العينة. يتم تحويل هذه الأنماط فوتوثرمالي إلى حقول الموجة الحرارية متماسكة، (إي) للسماح لهم تتدخل بشكل مدمر بينما تتفاعل مع عيب تحت السطح، و (3) لتحديد هذه العيوب من مسح السطح من درجة الحرارة الديناميكية من سطح العينة باستخدام التصوير الحراري كاميرا الأشعة تحت الحمراء. وبما أن التذبذب النسبي لدرجة الحرارة حول قيمة متوسط متباينة ببطء وليس قيمة درجة الحرارة المطلقة، فإن هذا النهج حساس للغاية للعيوب الخفية 1 .
واحدة من الخطوات الأكثر أهميةضمن البروتوكول هو إنشاء التجانس كافية من الشخصية شعاع الإضاءة عند استخدام مصدر الليزر مقرها سلم للتدفئة منظم (الرجوع إلى الخطوة 1.10). ليزر الصمام الثنائي يوفر إشعاع عالية ولكن يجب أن تغذي في جهاز العرض الذي يحتوي على حركة تحرير السودان مع قطر شعاع الصحيح والاتجاهية. بسبب عدم تطابق طفيف هندسي طيفي لا يمكن تجنبه مع المسار البصري الملكية داخل جهاز العرض، صورة مشوهة على عينة مشوهة. ولذلك، يجري تصحيح رقمي لقيم شدة الصورة التي تتحكم في الصورة المسقطة باستخدام قياس مرجعي لحزمة الشعاع. الخطوة الحرجة الثانية لتجربة ناجحة هي تحقيق حل مكاني عال لصورة الأشعة تحت الحمراء (راجع الخطوات 3.3.7- 3.3.8). ويجب أن تكون منطقة النضوب قد حلت مكانيا بما فيه الكفاية، وإلا لم يتم استنزافها، وبالتالي لا يمكن قياس أي موقف للخلل.
طبيعة الموجات الحرارية المطبقة هي انتشار مثلعملية تؤدي إلى توهين قوي من اتساعها على بضعة ملليمترات فقط. نلتقي هذا الحد المادي الجوهري باستخدام ليزر ديود عالية الطاقة كمصدر للضوء. عنق الزجاجة من الإعداد التجريبي الحالي هو الحد من الإجهاد الحراري لل سلم 21 ، مما يعني أنه لا يمكن تطبيق سوى جزء صغير من قوة الليزر المتاحة. لدينا الحل الحالي هو معطف سطح العينة مع طلاء الجرافيت الأسود. في المستقبل، فإننا نتوقع أجهزة مع حساسية أعلى باستخدام محركات الضوء الأمثل أو حتى صفائف الليزر مباشرة للتحويل، مثل عالية الطاقة العمودية تجويف سطح انبعاث الليزر (فسيل) صفائف 22 .
والفرق الرئيسي بين هذه الطريقة والتصوير الحراري القائم في الاختبار غير المدمر هو حقيقة أننا نستخدم التداخل المدمر لمجالات الموجات الحرارية المتماسكة تماما؛ وهو أمر ممكن فقط بعد السيطرة على السعة والمرحلة من مجموعة من الفردية ليمصادر غت بطريقة حتمية. ضمن الطرق الحرارية الحالية، يتم استخدام مصدر ضوء مستو، يتم التحكم فيه في المجال الزمني، أو بقعة ليزر مركزة واحدة، يتم التحكم بها في المجال المكاني. والميزة الرئيسية لنهجنا هو حساسية عالية لعيوب الكذب عمودي على سطح العينة.
وحتى الآن، لم يتم إنشاء سوى مصدرين فرديين للضوء. مع الليزر إلى جانب حركة تحرير السودان يمكننا، من حيث المبدأ، وتوليد ومراقبة ما يصل إلى مليون مصادر الضوء الفردية - مليون مصادر الحرارة - على سطح العينة. ومن الواضح أن هذا النهج يفتح إمكانيات تشكيل موجة حرارية تعسفية على المدى الطويل وتقنيات نقل من الموجات فوق الصوتية أو الرادار إلى مجال الحرارة الحرارية النشطة، ضمن الحدود المادية. وبمجرد حل تحدي الإشعاعات كما هو مذكور أعلاه ( أي القدرة الضوئية لكل بكسل متوقع) على نحو مرض، يصبح من الممكن اكتشاف عيوب أصغر حجما تقع أعمق تحت سطح الأرض. إلى هذا الحد،وقد تم اختبار الصلب، ولكن طريقة واعدة جدا وخاصة بالنسبة للمواد البلاستيكية والمواد المركبة، وغيرها من المواد الحساسة، وذلك بسبب انخفاض الضغط الحراري المطبقة.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
الكتاب ليس لديهم ما يكشف.
Acknowledgments
نود أن نشكر تارنا ستوديموند وهاجن ويندلر لالتقاط صور من الإعداد التجريبي وكذلك إعدادها لنشر الرقم. وعلاوة على ذلك، نود أن نشكر آن هيلدبراندت لإعداد العينة و سريدهار أونكريشناكوروب، ألكسندر باتيغ وفليكس فريتسش من أجل القراءة.
Materials
| Name | Company | Catalog Number | Comments |
| 500 W diode laser system, 940 nm | Laserline | LDM 500 - 20 | Pilot laser class 2 @ 650 nm, diode laser is a class 4 laser system --> special laboratory needed |
| Laser control box | Laserline | Laser control box LDM | Add on to the laser system, used to switch electronically, laser threshold, shutter, laser on 0 V..5 V TTL |
| Control box scanner | Laserline | Add on to the laser system, used to adjust the optical output power via analog signal from 0 V..10 V | |
| Fiber Laser Mount 2", f = 80 mm | Laserline | Add on to the laser system | |
| Multifunction Data Aquisition (DAQ) Device + BNC Terminal | National Instruments | NI-USB 6251 | The DAQ card is used to trigger the IR camera, the DLP Light Commander 5500, control Laser and diode PDA 36A |
| Standard - PC | Control PC - graphic card for two screens, at least 4 x USB, Windows based | ||
| BNC cabel | Standard cable | ||
| HDMI cable | Standard cable | ||
| Micro USB to USB cable | Standard cable | ||
| LabVIEW 2013 SP1 Development System | National Instruments | Development environment for device control | |
| LPPT control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT intensity software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT laser control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| Matlab 2016b | MathWorks | Postprocessing of the measurement data | |
| LPPT postprocessing software | BAM | Postprocessing of the measurement data | |
| IR camera control PC | InfraTec | Control PC is supplied by camera distributor | |
| IR camera control software | InfraTec | Irbis 3 Professional | |
| InfraTec SDK | InfraTec | Dynamic Link Library as interface between the native data aquisition format of Infratec and Matlab | |
| IR camera | InfraTec | Image IR 8300 | 640 x 512, cooled InSb detector, wavelength 2 µm..5.7 µm, noise = 20 mK + accessories (LAN cable, Digital in/out cable, space ring, power supply, case) |
| Tripod | Manfrotto | 161MK2B | |
| IR camera mount | Manfrotto | 405 | |
| Projector development kit (PDK) for digital light processing (DLP) technology (DLP Light Commander 5500) | Logic PD | DLP-LC-DLP5500-10R | DLP5500 Digital Micromirror Device from Texas Instruments included , light engine and case need to be disassembed |
| PDK control software | Logic PD | Included when delivered, DLP Light Commander control software | |
| Mechanical platform for the PDK | BAM | Self made (140 x 230 x 420) mm3 | |
| Power meter control unit | Ophir | Vega | USB Interface |
| 30 W power meter head | Ophir | 30(150)A-LP1-18 | Power meter head to determine Transmission of the projector system |
| 500 W power meter head | Ophir | FL500A | Power meter for process supervision |
| Motion controller | Newport | ESP301 | with USB Interface |
| Translation stage | Newport | M-ILS200CC | Connected to ESP301 |
| Photodiode with amplifier | Thorlabs | PDA 36A-EC | 1" mount |
| Reflective filter ND1 | Thorlabs | ND10A | to be mounted to the PDA 36A |
| Pinhole 1" | Thorlabs | P1000S | to be mounted to the PDA 36A |
| Optical aluminium breadboard | Thorlabs | MB60120/M | (1,200 mm x 900 mm) base |
| Plano Convex Lens f = 200 mm | Thorlabs | LA1979-B | Coated for IR, first telescope lens |
| Plano Convex Lens f = 75 mm | Thorlabs | LA1145-B | Coated for IR, second telescope lens |
| xy-translation stage | Newport | M401 | Used for adjusting the telecope |
| Beamsampler | Thorlabs | BSF20-B | Splits the optical output, used to reduce the optical input for the projector system |
| Mirror | Thorlabs | BB2-E03 | Mirror for coupling the beam to the DLP Light Commander |
| Heavy duty lab jack | Thorlabs | L490 | Used for the fiber mount and on top of the linear stage to position the sample (2x) |
| PDK-objective | Nikon | Nikon AF Nikkor 50 mm 1:1:8:D | Objective for DLP Light Commander, 50 mm |
| Plano Convex Lens f = 100 mm | Thorlabs | LA1050 -B | Lens is attached to the Nikon Objective |
| Bi-Convex Lens f = 60 mm | Thorlabs | LB1723 -B | Lens to be attached to the Nikon objective in order to determine the optical transmission with the 30 W measurement head |
| Square protected gold mirror | Thorlabs | PFSQ20-03-M01 | |
| High power IR sensor card | Newport | F-IRC-HP-M | Sensor card to check the optical pathway |
| 2" crosshairs | BAM | Self-made | |
| 1" crosshairs | BAM | Self-made | |
| Bullseye level | Thorlabs | LCL01 | |
| Translation Stage | Newport | M-UMR8.25 | Used for measuring the beam profile |
| Micrometer screw | Newport | DM17-25 | Used with translation stage M-UMR8.25 |
| Mounted Zero Aperture Iris | Thorlabs | ID75Z/M | used to check the optical pathway |
| Bases and Post Holders Essentials Kit, Metric and Universal Components | Thorlabs | ESK01/M | Basis |
| Posts & Accessories Essentials Kit, Metric and Universal Components | Thorlabs | ESK03/M | |
| M6 Cap Screw and Hardware Kit | Thorlabs | HW-KIT2/M | |
| Construction Rails | Thorlabs | XE25L700/M | |
| 1" Construction Cube | Thorlabs | RM1G | Used to mount construction rails |
| Electrical discharge machining | Sodick | AG60L | www.sodick.de |
| St37 block of steel (100 x 100 x 40) mm3 |
BAM | self-made, hidden defect with remaining wall thicknesses of 0.25 mm, 0.5 mm, 0.70 mm, 1.25 mm (shown in Figure 5) | |
| St37 block of steel (100 x 100 x 40) mm |
BAM | self-made, hidden defect with remaining wall thicknesses of 1 mm, 1.5 mm, 1.75 mm, 2 mm (shown in Figure 5) | |
| Graphite spray | CRC Industries Europe NV | GRAPHIT 33 | Ref. 20760, 200 mL aerosol (Kontakt-Chemie) |
| Protective tape | Tesa | tesakrepp 4348 | used to protect the hidden defects while coating |
References
- Thiel, E., Kreutzbruck, M., Ziegler, M. Laser-projected photothermal thermography using thermal wave field interference for subsurface defect characterization. Appl. Phys. Lett. 109 (12), 123504 (2016).
- Ibarra-Castanedo, C., Tarpani, J. R., Maldague, X. P. V. Nondestructive testing with thermography. Eur. J. Phys. 34 (6), 91-109 (2013).
- Maldague, X. P. Introduction to NDT by active infrared thermography. Mater. Eval. 60 (9), 1060-1073 (2002).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning pulsed laser spot thermography. Ndt&E Int. 44 (2), 216-225 (2011).
- Lugin, S. Detection of hidden defects by lateral thermal flows. Ndt&E Int. 56, 48-55 (2013).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning laser-line thermography and laser-spot thermography. Meas. Sci. Technol. 22 (3), (2011).
- Pech-May, N. W., Oleaga, A., Mendioroz, A., Salazar, A. Fast Characterization of the Width of Vertical Cracks Using Pulsed Laser Spot Infrared Thermography. Journal of Nondestructive Evaluation. 35 (2), 22 (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. SPIE 9761. Douglass, M. R., King, P. S., Lee, B. L. , Spie-Int Soc Optical Engineering. (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. WCNDT 2016. , 6 (2016).
- Mandelis, A. Diffusion-Wave Fields: mathematical methods and Green functions. , Springer-Verlag. (2001).
- Almond, D., Patel, P. Photothermal Science and Techniques. 10, Chapman & Hall. (1996).
- Salazar, A. Energy propagation of thermal waves. Eur. J. Phys. 27 (6), 1349-1355 (2006).
- Bennett, C. A., Patty, R. R. Thermal wave interferometry: a potential application of the photoacoustic effect. Appl. Opt. 21 (1), 49-54 (1982).
- Busse, G. Stereoscopic depth analysis by thermal wave transmission for nondestructive evaluation. Appl. Phys. Lett. 42 (4), 366 (1983).
- Holtmann, N., Artzt, K., Gleiter, A., Strunk, H. P., Busse, G. Iterative improvement of Lockin-thermography results by temporal and spatial adaption of optical excitation. Qirt J. 9 (2), 167-176 (2012).
- Pribe, J. D., Thandu, S. C., Yin, Z., Kinzel, E. C. Toward DMD illuminated spatial-temporal modulated thermography. Proc. SPIE 9861. , (2016).
- Ravichandran, A. Spatial and temporal modulation of heat source using light modulator for advanced thermography. , Missouri University of Science and Technology. (2015).
- DLP 0.55 XGA Series 450 DMD. , TexasInstruments. (2015).
- Application Note - DLP System Optics. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?baseLiteratureNumber=dlpa022&keyMatch=dlpa022&tisearch=Search-EN-Everything (2010).
- DLP LightCommander Control Software - User Manual. , LogicPD. Available from: https://support.logicpd.com/ProductDownloads/LegacyProducts/DLPLightCommander.aspx?_sw_csrfToken=318b0448 (2011).
- White Paper - Laser Power Handling for DMDs. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?literatureNumber=dlpa027&fileType=pdf (2012).
- Moench, H., et al. High-power VCSEL systems and applications. Proc. SPIE 9348. , (2015).
