

Summary
इस पद्धति का उद्देश्य ऊर्ध्वाधर उपसतह दोषों को ढूंढना है। यहां, हम एक स्थानिक प्रकाश मॉडुलक के साथ एक लेजर जोड़े हैं और उच्च हल करने वाले थर्मल इमेज प्राप्त करते समय दो विरोधी चरणबद्ध मॉडेटेड लाइनों के साथ एक नमूना सतह को निश्चित रूप से गर्मी के लिए अपने वीडियो इनपुट को ट्रिगर करते हैं। दोष स्थिति थर्मल तरंग हस्तक्षेप minima के मूल्यांकन से प्राप्त की है।
Abstract
प्रस्तुत पद्धति का उपयोग सतह पर लंबवत लंबवत दोषों का पता लगाने के लिए किया जाता है। इस लक्ष्य को हासिल करने के लिए, हम दोषपूर्ण रूप से हस्तक्षेप करने वाले थर्मल तरंग क्षेत्र बनाते हैं जो दोष से परेशान होते हैं। यह प्रभाव मापा और दोष का पता लगाने के लिए इस्तेमाल किया जाता है। हम एक संशोधित प्रोजेक्टर का उपयोग करके विनाशकारी रूप से हस्तक्षेप करने वाले लहर क्षेत्रों का निर्माण करते हैं। प्रोजेक्टर का मूल प्रकाश इंजन एक फाइबर-युग्मित उच्च-शक्ति डायोड लेजर के साथ बदल दिया गया है। इसकी किरण को प्रोजेक्टर के स्थानिक प्रकाश मॉडुलर के आकार और गठबंधन किया गया है और इष्टतम ऑप्टिकल थ्रूपुट और सजातीय प्रक्षेपण के लिए अनुकूलित किया गया है, जो पहले बीम प्रोफ़ाइल को चित्रित करता है, और, दूसरा, इसे यंत्रवत् और संख्यात्मक रूप से ठीक करना एक उच्च प्रदर्शन अवरक्त (आईआर) कैमरा तंग ज्यामितीय स्थिति (ज्यामितीय छवि विकृतियों के सुधार सहित) के अनुसार सेट किया गया है और नमूना सतह पर कम तापमान दोलनों का पता लगाने के लिए आवश्यकता है। डाटा अधिग्रहण एक बार एक समय होनेवाला बनाना के बाद किया जा सकता हैव्यक्तिगत थर्मल वेव फ़ील्ड स्रोतों, स्कैनिंग चरण और आईआर कैमरा की स्थापना के लिए एक समर्पित प्रयोगात्मक सेटअप का उपयोग करके स्थापित किया गया है, जिसे विशिष्ट सामग्री की जांच के लिए ट्यून किया जाना चाहिए। डेटा के बाद प्रसंस्करण के दौरान, नमूना की सतह के नीचे एक दोष की उपस्थिति पर संबंधित जानकारी निकाली जाती है। यह नमूना सतह के तथाकथित कमी रेखा से आ रही अधिग्रहीत थर्मल विकिरण के आसुत भाग से प्राप्त किया गया है। अंतिम चरण में इन दोलनों के स्थानिक-अस्थायी आकृति के विश्लेषण से दोष का सही स्थान का अनुमान लगाया गया है। यह विधि संदर्भ-मुक्त है और थर्मल तरंग क्षेत्र में परिवर्तन के प्रति बहुत संवेदनशील है। अब तक, इस पद्धति का परीक्षण इस्पात के नमूनों से किया गया है लेकिन यह विशेष रूप से तापमान संवेदनशील सामग्री के लिए अलग-अलग सामग्रियों पर लागू है।
Introduction
लेजर ने फोटोथर्मल थर्मोग्राफी (एलपीपीटी) पद्धति का प्रयोग किया है जिसका उपयोग उपसतह दोषों का पता लगाने के लिए किया जाता है जो टेस्ट नमूने की मात्रा में एम्बेडेड होते हैं और मुख्य रूप से इसकी सतह पर लंबवत होते हैं।
इस पद्धति में चित्रा 1 बी में दिखाए गए एक ही विस्तार और आवृत्ति के दो विरोधी चरणबद्ध थर्मल तरंग क्षेत्रों के विनाशकारी हस्तक्षेप का उपयोग किया जाता है। आइसोट्रोपिक दोष-मुक्त सामग्री में, थर्मल तरंगों को सुस्पष्ट सुपरपोजिशन द्वारा समरूपता विमान पर विनाशकारी ( अर्थात् शून्य तापमान दोलन) को बेअसर करना। एक उपसतह दोष के साथ एक पदार्थ के मामले में, विधि क्षणिक ( यानी इन-विमान) घटकों के बीच के अंतर को क्षणिक गर्मी प्रवाह के बीच लेता है और यह दोष इस इंटरैक्शन को नमूना सतह पर समरूपता रेखा पर पुन: निर्मित ओसीस्लिंग तापमान बढ़ाव में मापा जा सकता है। अब, दोष वाला नमूना सुपरपोर्टेड थर्मल तरंग क्षेत्र द्वारा स्कैन किया गया है औरतापमान बढ़ाव का स्तर नमूना स्थिति के संबंध में मापा जाता है। समरूपता के कारण, जब दोष समरूपता विमान को पार कर जाता है, तो एक बार फिर विनाशकारी हस्तक्षेप की स्थिति संतुष्ट हो जाती है; इससे हमें दोष का पता लगाने में सक्षम होता है। इसके अलावा, क्योंकि विनाशकारी हस्तक्षेप के अधिक से अधिक अशांति के स्तर में दोष की गहराई से संबंध है, तापमान स्कैन 1 का विश्लेषण करके इसकी गहराई को निर्धारित करना संभव है।
एलपीपीटी को सक्रिय थर्मोग्राफी पद्धति, एक अच्छी तरह से स्थापित गैर-विनाशकारी पद्धति के लिए सौंपा जा सकता है, जहां क्षणिक ताप सक्रिय रूप से उत्पन्न होता है और परिणामस्वरूप, क्षणिक, तापमान वितरण एक थर्मल आईआर कैमरे के माध्यम से मापा जाता है। सामान्य तौर पर, इस पद्धति की संवेदनशीलता उन दोषों तक सीमित होती है जो क्षणिक गर्मी प्रवाह के लिए मूल रूप से लंबवत होती हैं। इसके अलावा, शासी क्षणिक गर्मी प्रवाहकत्त्व समीकरण एक परवलयिक आंशिक अंतर हैNtial समीकरण, मात्रा में गर्मी प्रवाह जोरदार नम है। परिणामस्वरूप, सक्रिय थर्मोग्राफ़ी पद्धति की जांच गहराई निकट सतह क्षेत्र तक सीमित होती है, आमतौर पर मिलीमीटर सीमा में। दो सबसे सामान्य सक्रिय थर्माफोग्राफी तकनीकों स्पंदित और लॉक-इन थर्माफ़ोग्राफी हैं वे प्लानर ऑप्टिकल सतह रोशनी 2 के कारण तेजी से चल रहे हैं, लेकिन सतह के लिए लंबवत क्षणिक गर्मी प्रवाह को जन्म देते हैं। इसलिए, इन तकनीकों की संवेदनशीलता गर्म नमूनों की सतह को मुख्य रूप से उन्मुख समानांतर ( उदा। डेलामेंटन या वियोज़) दोषों तक सीमित है। स्पेशल थर्माफोग्राफी के लिए एक अनुभवजन्य नियम बताता है कि "सबसे छोटी सी जांच करने योग्य दोष की त्रिज्या सतह के नीचे इसकी गहराई से कम से कम एक से दो गुना अधिक होनी चाहिए" एक लंबवत उन्मुख दोष ( जैसे एक दरार) और गर्मी प्रवाह के बीच प्रभावी संपर्क क्षेत्र को बढ़ाने के लिए, गर्मी प्रवाह की दिशा में होना चाहिएबदल गया। स्थानीय उत्तेजना, उदाहरण के लिए एक रेखीय या परिपत्र स्थान के साथ एक केंद्रित लेज़र का उपयोग करके, एक इन-प्लेन घटक के साथ गर्मी प्रवाह उत्पन्न करता है जो सीधा दोष 4 , 5 , 6 , 7 के साथ प्रभावी ढंग से बातचीत करने में सक्षम होता है।
प्रस्तुत विधि में, हम उपसतह दोषों का पता लगाने के लिए पार्श्व गर्मी प्रवाह घटकों का भी उपयोग करते हैं, लेकिन हम इस तथ्य का उपयोग करते हैं कि थर्मल तरंगों को ढंका जा सकता है, जबकि दोष, विशेष रूप से ऊर्ध्वाधर उन्मुख, इस अतिपवित्रता को परेशान करते हैं इस तरीके से, प्रस्तुत विधि संदर्भ-मुक्त, सममित और बहुत ही संवेदनशील तरीके से मिलती है, क्योंकि संभव है कि 8 , 9 के नीचे के एक चौड़ाई / गहराई के अनुपात में कृत्रिम उपसतह दोषों का पता लगाया जा सके। अभी तक, पर्याप्त ऊर्जा की आपूर्ति वाले दो विरोधी चरणबद्ध थर्मल तरंग क्षेत्रों को बनाना मुश्किल था। हमने इसे हासिल कियावाई एक उच्च प्रकाश डायोड लेजर के लिए एक स्थानिक प्रकाश मॉडुलक (एसएलएम) को युग्मित कर रहा है, जिससे हमें लेज़र सिस्टम की उच्च ऑप्टिकल पावर को एसएलएम के स्थानिक और अस्थायी संकल्प के साथ विलय करने में मदद मिली ( चित्रा 2 देखें) एक उच्च-शक्ति प्रोजेक्टर में । प्रक्षेपित छवि की पिक्सेल चमक ( चित्रा 2 , चित्रा 1 ए देखें ) के माध्यम से थर्मल तरंग क्षेत्र अब दो विरोधी चरणबद्ध sinusoidally modulated लाइन पैटर्न के photothermal रूपांतरण के द्वारा बनाई गई हैं। यह नमूना की सतह के संरचित हीटिंग की ओर जाता है और परिणामों में अच्छी तरह से परिभाषित विनाशकारी थर्मल तरंग क्षेत्रों में हस्तक्षेप होता है। एक उपसतह दोष के लिए, विनाशकारी निष्कर्ष की गड़बड़ी आईआर कैमरा का उपयोग कर सतह पर तापमान दोलन के रूप में मापा जाता है।
थर्मल लहर की संज्ञा, विवादित रूप से चर्चा की जाती है क्योंकि तापीय तरंगें गर्मी प्रसार के फैलाने वाले चरित्र के कारण ऊर्जा परिवहन नहीं करती हैं। फिर भी, लहर की तरह व्यवहार जब hea है समय-समय पर टिंग, हमें असली तरंगों और प्रसार प्रक्रियाओं के बीच समानताएं 10 , 11 , 12 के साथ उपयोग करने की इजाजत देता है। इस प्रकार, एक थर्मल तरंग को प्रचार के दिशा में बेहद भरे हुए समझा जा सकता है, लेकिन समय-समय पर आवधिक ( चित्रा 1 बी )। विशेषता थर्मल प्रसार की लंबाई  इसके भौतिक गुण (थर्मल चालकता कश्मीर , गर्मी क्षमता सी पी और घनत्व ρ ), और उत्तेजना आवृत्ति ƒ द्वारा वर्णित है। यद्यपि थर्मल लहर दृढ़ता से क्षय है, इसकी लहर प्रकृति नमूने के गुणों में अंतर्दृष्टि हासिल करने के लिए लागू की जा सकती है। थर्मल तरंग हस्तक्षेप का पहला आवेदन परतों की मोटाई निर्धारित करने के लिए इस्तेमाल किया गया था। हमारे विधि के विपरीत, हस्तक्षेप प्रभाव गहराई आयाम ( यानी सतह पर सीधा) में इस्तेमाल किया गया था 13. "लेजर बीम को विभाजित करके दूसरे आयाम में हस्तक्षेप करने के विचार को विस्तारित करना, थर्मल तरंग हस्तक्षेप का इस्तेमाल साइडसफेस दोषों के आकार के लिए किया गया था। फिर भी इस पद्धति को ट्रांसमिशन विन्यास में लागू किया गया था, जिसका अर्थ है कि यह प्रवेश द्वारा सीमित था थर्मल तरंग की गहराई। इसके अलावा, क्योंकि केवल एक लेजर स्रोत का उपयोग किया गया है, इस विधि को रचनात्मक हस्तक्षेप होता है, जिसका अर्थ है कि दोष मुक्त संदर्भ की आवश्यकता है। थर्मल तरंग हस्तक्षेप का उपयोग करने के विचार के अलावा, स्थानिक और पहले अस्थायी रूप से नियंत्रित हीटिंग होल्टमैन एट अल द्वारा किया गया था । एक अनधिकृत लिक्विड क्रिस्टल डिस्प्ले (एलसीडी) प्रोजेक्टर का उपयोग, जिसमें प्रकाश स्रोत में अंतर्निहित था, जो ऑप्टिकल आउटपुट पावर में गंभीर रूप से सीमित था। 15. प्राइबे और रविचंद्रन द्वारा आगे के तरीकों का लक्ष्य ऑप्टिकल बढ़ाने एक एसएलएम 16 के लिए एक लेजर युग्मन द्वारा आउटपुट पावर , S = "xref"> 17
इसके भौतिक गुण (थर्मल चालकता कश्मीर , गर्मी क्षमता सी पी और घनत्व ρ ), और उत्तेजना आवृत्ति ƒ द्वारा वर्णित है। यद्यपि थर्मल लहर दृढ़ता से क्षय है, इसकी लहर प्रकृति नमूने के गुणों में अंतर्दृष्टि हासिल करने के लिए लागू की जा सकती है। थर्मल तरंग हस्तक्षेप का पहला आवेदन परतों की मोटाई निर्धारित करने के लिए इस्तेमाल किया गया था। हमारे विधि के विपरीत, हस्तक्षेप प्रभाव गहराई आयाम ( यानी सतह पर सीधा) में इस्तेमाल किया गया था 13. "लेजर बीम को विभाजित करके दूसरे आयाम में हस्तक्षेप करने के विचार को विस्तारित करना, थर्मल तरंग हस्तक्षेप का इस्तेमाल साइडसफेस दोषों के आकार के लिए किया गया था। फिर भी इस पद्धति को ट्रांसमिशन विन्यास में लागू किया गया था, जिसका अर्थ है कि यह प्रवेश द्वारा सीमित था थर्मल तरंग की गहराई। इसके अलावा, क्योंकि केवल एक लेजर स्रोत का उपयोग किया गया है, इस विधि को रचनात्मक हस्तक्षेप होता है, जिसका अर्थ है कि दोष मुक्त संदर्भ की आवश्यकता है। थर्मल तरंग हस्तक्षेप का उपयोग करने के विचार के अलावा, स्थानिक और पहले अस्थायी रूप से नियंत्रित हीटिंग होल्टमैन एट अल द्वारा किया गया था । एक अनधिकृत लिक्विड क्रिस्टल डिस्प्ले (एलसीडी) प्रोजेक्टर का उपयोग, जिसमें प्रकाश स्रोत में अंतर्निहित था, जो ऑप्टिकल आउटपुट पावर में गंभीर रूप से सीमित था। 15. प्राइबे और रविचंद्रन द्वारा आगे के तरीकों का लक्ष्य ऑप्टिकल बढ़ाने एक एसएलएम 16 के लिए एक लेजर युग्मन द्वारा आउटपुट पावर , S = "xref"> 17
यहां प्रस्तुत प्रोटोकॉल में बताया गया है कि स्टील के नमूनों की सतह पर लंबवत खराबी वाले उपसतह दोषों का पता लगाने के लिए एलपीपीटी विधि कैसे लागू करें। यह विधि प्रारंभिक चरण में है, फिर भी प्रस्तावित दृष्टिकोण को मान्य करने के लिए पर्याप्त शक्तिशाली है; हालांकि, यह प्रयोगात्मक सेटअप की प्राप्त ऑप्टिकल आउटपुट पावर के मामले में अभी भी सीमित है चूंकि ऑप्टिकल आउटपुट पावर की वृद्धि एक चुनौती बनी हुई है, प्रस्तुत विधि को लेपित स्टील के लिए लागू किया गया है जिसमें कृत्रिम विद्युत निर्वहन का प्रयोग किया जाता है। फिर भी, प्रोटोकॉल के सबसे महत्वपूर्ण और सबसे महत्वपूर्ण कदम, एक सजातीय संरचित रोशनी पैदा करने, विनाशकारी थर्मल तरंग हस्तक्षेप के लिए किसी और चीज की बैठक, और दोष का पता लगाने, फिर भी अधिक मांग वाले दोषों के लिए भी पकड़ता है। चूंकि शासी मात्रा मात्रा थर्मल प्रसार लंबाई है μ, एलपीपीटीटी पद्धति कई अलग-अलग सामग्रियों के साथ ही लागू की जा सकती है।
NT ">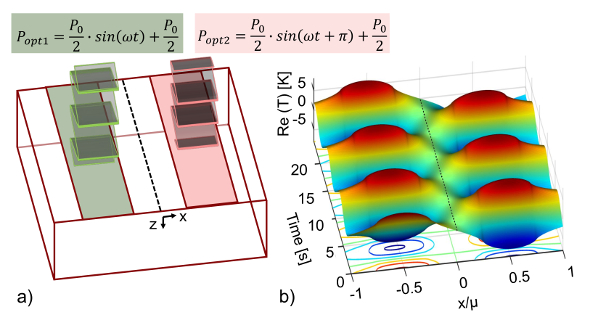
चित्रा 1: विनाशकारी हस्तक्षेप प्रभाव के सिद्धांत। ( ए ) प्रयोगों के दौरान प्रयुक्त रोशनी पैटर्न के योजनाबद्ध। नमूना अंतर है और π के चरण बदलाव के साथ दो समय-समय पर प्रबुद्ध पैटर्न द्वारा अस्थायी रूप से गरम किया जाता है। धराशायी रेखा दोनों पैटर्नों के बीच सममितता रेखा का प्रतिनिधित्व करती है। इस रेखा का मूल्यांकन "न्यूनता रेखा" के रूप में किया जाएगा। ( बी ) थर्मल गर्मी प्रवाहकत्त्व समीकरण के विश्लेषणात्मक समाधान से गणना के अनुसार स्थानिक और अस्थायी रूप से हल किए गए तापीय परिणाम के आरेख। यह पी ऑप्ट 1 = 1.5 डब्ल्यू पाप (2π 0.125 हर्ट्ज टी ) + 1.5 डब्ल्यू और पी ऑप्ट 2 = 1.5 डब्ल्यू पाप (2π 0.125 हर्ट्ज टी ) के साथ दो नमूनों की अवहेलना के साथ (ए) रोशनी में प्रक्षेपण करने वाले तापीय तरंगों को दर्शाता है। + Π) + 1.5 डब्ल्यू निर्माण इस्पात के लिए ρ 3 , सी पी = 461 ज / (किग्रा · के), कश्मीर = 54 डब्ल्यू / (मी · के)। डैश्ड लाइन में तापमान प्रोफाइल समरूप, आइसोटोपिक सामग्री के लिए कोई थर्मल दोलन नहीं दिखाता है। इस आंकड़े के एक बड़े संस्करण को देखने के लिए कृपया यहां क्लिक करें

चित्रा 2 चित्रा 2: सक्रिय थर्माफोग्राफी में प्रयुक्त संरचित हीटिंग के माप सिद्धांत के योजनाबद्ध। एक शीर्ष टोपी प्रोफाइल के लिए एक गाऊसी बीम को एक स्थानिक लाइट मॉड्युलेटर (एसएलएम) पर लागू किया जाता है। एसएलएम अलग-अलग बदलाव के तत्वों के द्वारा बीम को और उसके स्विचिंग स्पीड द्वारा अस्थायी तौर पर हल करता है। प्रत्येक तत्व एक SLM पिक्सेल का प्रतिनिधित्व करता है इस प्रयोग में, एसएलएम डिजिटल माइक्रो मिरर डिवाइस (डीएमडी) है। एक समय नियतात्मक नियंत्रण सॉफ्टवेयर, नमूना सतह के साथ पिक्सेल ब्राइटनेस A को संशोधित करकेएक संरचित तरीके से गरम किया जाता है। प्रस्तुत प्रयोग के मामले में, हम दो विरोधी चरणबद्ध लाइनों (चरणों: φ = 0, π) को विनियमित करते हैं, जो कोणीय आवृत्ति ω में सुसंगत रूप से थर्मल तरंग क्षेत्र को दखल देते हैं। तरंग का क्षेत्र नमूना की आंतरिक संरचना के साथ बातचीत करता है जिससे सतह पर तापमान का क्षेत्र भी प्रभावित होता है। यह एक मध्य-लहर अवरक्त कैमरा द्वारा अपने थर्मल विकिरण के माध्यम से मापा जाता है। इस आंकड़े के एक बड़े संस्करण को देखने के लिए कृपया यहां क्लिक करें
Subscription Required. Please recommend JoVE to your librarian.
Protocol
नोट: सावधानी: लेजर सुरक्षा पर ध्यान दें क्योंकि सेटअप एक क्लास 4 लेजर का उपयोग करता है। कृपया सही सुरक्षात्मक चश्मा और कपड़े पहनें इसके अलावा, देखभाल के साथ पायलट लेजर को संभालना
1. प्रोजेक्टर डेवलपमेंट किट (पीडीके) के लिए डायोड लेजर के लिए युगल
- रोटी तैयार करें
- चित्रा 3 में दिखाए गए अनुसार रोटी के सभी उपकरणों को प्रीसाइम्बल करें। एक लेजर प्रयोगशाला में सभी प्रीसाइम्म्ड उपकरणों के साथ ब्रेडबोर्ड को रखें।
- लेटर फाइबर को ब्रेडबोर्ड पर माउंट करें
- लेजर फाइबर माउंट ( सीएफ। चित्रा 3 ) में फाइबर संलग्न करें।
- डायोड लेजर पर शटर और लेजर थ्रेशोल्ड स्विच करें। उच्च शक्ति आईआर सेंसर कार्ड का उपयोग करके, बीम के आउटपुट व्यास (40 मिमी) की जांच करें। लेजर थ्रेशहोल्ड बंद करें और पायलट लेजर को स्विच करें। ऑप्टिकल अक्ष की ऊंचाई को समायोजित करके लेजर फाइबर माउंट को पीडीके के प्रवेश द्वार तक का उपयोग करके समायोजित करेंप्रयोगशाला जैक ( सीएफ। चित्रा 4 ए, 4 डी )
- रेल के साथ लेजर फाइबर माउंट ले जाएं। दूरी पर पायलट लेजर की स्थिति का निरीक्षण करें इसके केंद्र बिंदु को स्थानांतरित नहीं करना चाहिए यदि ऐसा होता है, लैब जैक और लेजर फाइबर माउंट के बीच माउंट की जांच करें। लेजर फाइबर फिक्स बाद में माउंट
नोट: रेल ऑप्टिकल अक्ष का संदर्भ है और रोटी के समांतर समानांतर होना चाहिए। टेलीस्कोप लेंस को पहले ही हटा दिया जाना चाहिए।
- दूरबीन समायोजित करें
- बीम के व्यास को 40 मिमी से 15 मिमी तक कम करने के लिए दूरबीन का उपयोग करें ताकि पीडीके के प्रवेश द्वार में प्रवेश किया जा सके ( सीएफ। चित्रा 4 ए, 4 डी )। क्रमशः पहले और दूसरे लेंस के रूप में 200 मिमी और 75 मिमी प्लानो उत्तल लेंस का प्रयोग करें। पहले लेंस ( सीएफ। चित्रा 4 बी ) को स्थानांतरित करने के लिए पायलट लेजर और क्रॉसहेयर का उपयोग करें।
- स्टील शासक का उपयोग करते हुए दोनों लेंस के बीच की दूरी को लगभग समायोजित करें क्रॉसहेयर फिर से उपयोग करेंपायलट लेजर के लिए लेंस की स्थिति दूसरे लेंस को एक XY अनुवाद मंच पर रखें किरण को टक्कर लेने के लिए मंच का उपयोग करें
- बीम सैंपलर संरेखित करें
- 45 डिग्री के कोण पर बीम नमूना मारो (लेजर बीम के साथ) बीम सैंपलर की स्थिति निर्धारित करने के लिए पहली बार एक दूसरी रेल का उपयोग करें।
नोट: अधिकांश ऑप्टिकल पावर 500 W पावर मीटर के द्वारा दूर ठंडा है। डायोड लेजर का ऑप्टिकल आउटपुट पूरी शक्ति पर अधिक स्थिर है, यही वजह है कि ऑप्टिकल पावर को विभाजित किया गया है। - पायलट लेजर के साथ रेल ( सीएफ। चित्रा 4 ए ) के साथ ऑप्टिकल पथ की तरफ देखने के लिए ऊंचाई-निश्चित पोस्ट में आईरिस का उपयोग करें।
- 45 डिग्री के कोण पर बीम नमूना मारो (लेजर बीम के साथ) बीम सैंपलर की स्थिति निर्धारित करने के लिए पहली बार एक दूसरी रेल का उपयोग करें।
- दर्पण को संरेखित करें
- आरेख 4 सी में दिखाए गए दर्पण को संरेखित करने से पहले, पीडीके और इसकी बेस प्लेट को हटा दें। दूसरे के लिए एक तिहाई रेल लंबवत ठीक करें एक बार फिर, परितारिका द्वारा ऑप्टिकल पथ की जांच करें।
नोट: ऑप्टिकल पथ एसरेल अभिविन्यास के साथ गठबंधन होना चाहिए बीम को जोड़ना चाहिए
- आरेख 4 सी में दिखाए गए दर्पण को संरेखित करने से पहले, पीडीके और इसकी बेस प्लेट को हटा दें। दूसरे के लिए एक तिहाई रेल लंबवत ठीक करें एक बार फिर, परितारिका द्वारा ऑप्टिकल पथ की जांच करें।
- पीडीके को डिससेम्बल और स्थिति दें
- पीडीके 18 की स्थिति से पहले, मूल प्रकाश इंजन को हटा दें।
नोट: पीडीके 1 9 ( सीएफ। चित्रा 4 डी, प्रवेश द्वार) के एलईड को मूल रूप से दो पूर्व लेंस थे। एसीटोन का इस्तेमाल करके वे चिपक गए हैं और इसे निकालने की जरूरत है - पीडीके के मंच को तीसरे रेल के समांतर होने के लिए संरेखित करें और इसलिए किरण के ऑप्टिकल अक्ष को। बीम के सापेक्ष पीडीके की स्थिति के लिए पीडीके के प्रवेश से समायोजित क्रॉसहायर का उपयोग करें। समांतर समानांतर रहें पायलट लेजर बंद करें, क्योंकि यह पीडीके को पास करने के लिए बहुत कमजोर है।
- पीडीके 18 की स्थिति से पहले, मूल प्रकाश इंजन को हटा दें।
- ऑप्टिकल शक्ति की जांच के लिए एक सफेद छवि को प्रोजेक्ट करें
- सुनिश्चित करें कि पीडीके के एचडीएमआई-केबल और यूएसबी-केबल के साथ-साथ डेटा अधिग्रहण (डीएक्यू) कार्ड से जुड़े हैंनियंत्रण पीसी "लेजर शटर", "लेजर थ्रेसहोल्ड" और "लेजर ऑन" डीएक्यू कार्ड के लिए लेज़र कंट्रोल बॉक्स पर बंदरगाहों को कनेक्ट करें। डीएक्यू कार्ड के लिए नियंत्रण बॉक्स स्कैनर के "लेजर नियंत्रण वोल्टेज" पोर्ट को कनेक्ट करें
- पीडीके कंट्रोल सॉफ़्टवेयर 20 को प्रारंभ करें और इसे चित्रा 5 बी के i.1 से i.3 के चरणों के बाद एक साधारण प्रोजेक्टर के रूप में कॉन्फ़िगर करें। दूसरी स्क्रीन सक्षम करें और सुनिश्चित करें कि दूसरी स्क्रीन में कोई विंडो नहीं है। सफेद डेस्कटॉप पृष्ठभूमि का उपयोग करें और इनपुट प्रकाश स्रोत के रूप में एलईडी फ्लैश लाइट के साथ प्रोजेक्टर के फ़ंक्शन की जांच करें।
नोट: यदि पीडीके के चित्र विमान को एक सफेद छवि पेश की जाती है, तो डिवाइस ठीक से काम कर रहा है।
- ऑप्टिकल इनपुट शक्ति की जांच करें
- पीडीके ( सीएफ। चित्रा 4e - स्थिति 1) के सामने ऑप्टिकल पथ में बिजली मीटर नियंत्रण इकाई से जुड़े 30 डब्ल्यू वाटर मीटर का सिर रखें। डायोड लेजर स्विच करेंएलपीपीटी लेजर कंट्रोल सॉफ़्टवेयर के साथ चरण 1 के i.1 से i.3 को i.1 के कम स्तर पर i.1 = 0.5 वी।
नोट: एलपीपीटी लेजर कंट्रोल सॉफ्टवेयर डीएक्यू कार्ड स्विच करता है जो लेज़र कंट्रोल आउटपुट ( सीएफ 1.7.1) स्विच करता है। लेजर सुरक्षा, चश्मा और सुरक्षात्मक कपड़े पहनें! - उच्च-शक्ति आईआर सेंसर कार्ड के साथ बिजली मीटर सेंसर की स्थिति की जांच करें आईआर कार्ड को बीम में पकड़ो और चमक देखें। बीम व्यास को पावर मीटर सेंसर क्षेत्र से मेल करें ( चित्रा 3 )।
- पीडीके के द्वार पर अधिकतम ऑप्टिकल इनपुट शक्ति की जांच करें (फिर चित्रा 5 ए का अनुसरण करें), कदम i.1) 10 वी के मूल्य के साथ।
नोट: पीडीके के प्रवेश पर ऑप्टिकल इनपुट शक्ति अधिकतम 22 W 21 के आसपास होनी चाहिए। इस विन्यास पर, एसएलएम को नष्ट किए बिना 5 मिनट तक माप के समय को बर्दाश्त किया गया था, जो कि एक डिजिटल माइक्रोमरिकर डिवाइस (डीएमडी) के रूप में महसूस किया गया था। - ऑप्टिकल आउटपुट पावर की जांच करें
- PDK उद्देश्य ( सीएफ। चित्रा 4 ई ) से जुड़ा एफएएफ = 60 मिमी लेंस का उपयोग करके पीडीके को 60 मिमी की लगभग दूरी में 30 डब्ल्यू बिजली मीटर के सिर की स्थिति।
- प्रोजेक्टर ( सीएफ। आकृति 4 डी ) के प्रवेश पर एलईडी फ्लैश लाइट की स्थिति और उस पर स्विच करें। पावर मीटर सिर की स्थिति को ठीक धुन करें, ताकि यह चित्र 4e में दिखाए अनुसार अनुमानित छवि का प्रकाश एकत्र कर सके। बाद में एलईडी फ्लैश लाइट निकालें
- एलपीपीटी लेजर कंट्रोल सॉफ्टवेयर शुरू करें "वोल्टेज" फ़ील्ड में '0.5 वी' दर्ज करें और "लेजर ऑन!" पर क्लिक करें बटन। बिजली मीटर नियंत्रण इकाई से ऑप्टिकल शक्ति पढ़ें "रोकें" बटन पर क्लिक करके लेजर को रोकें इन चरणों को 2 वी, 6 वी, 10 वी ( सीएफ। चित्रा 5 ए , i.1 से i.3) के लिए दोहराएं।
नोट: यदि 10 वी का वोल्टेज एक ऑप्टिकल आउटपुट पावर प्रदान करता है,# 62; 4 डब्ल्यू, प्रारंभिक परीक्षण सफल होता है वरना, ऑप्टिकल संरेखण की जांच की जानी चाहिए। दर्पण को समायोजित करके ऑप्टिकल आउटपुट पावर को अधिकतम करने का प्रयास करें।
- बीम प्रोफाइल को मापें
- परिणामस्वरूप अनुमानित छवि ( सीएफ। चित्रा 4f ) के बीम प्रोफाइल को मापने के लिए एम्पलीफायर और पिनहोल के साथ फोटो डायोड का उपयोग करें। यदि बीम प्रोफाइलर सुलभ है, तो इस उपकरण का उपयोग करें, लेकिन बीम को कमजोर कर दें।
- एक अनुवाद चरण में फोटो डायोड संलग्न करें जो स्वयं को ब्रैकेट पर मुहिम लगाया गया है। इसके अलावा डायोड में एक तटस्थ-घनत्व (एनडी) 1 रिफ्लेक्टिव फिल्टर और 1 मिमी पिनहोल संलग्न करें। मोटर चालित अनुवाद मंच और लैब जैक के शीर्ष पर फोटो डायोड रखें। ऊंचाई हासिल करने के लिए, दो ब्रेडबोर्ड (100 मिमी x 100 मिमी) का उपयोग करें।
- पीडीके-उद्देश्य ( सीएफ। चित्रा 4 ई ) के बाद एफ़ = 100 मिमी लेंस का उपयोग करें और एलईडी फ्लैश लाइट ( सीएफ। चरण 1.7) का उपयोग करके एक सफेद छवि का प्रोजेक्ट करें। फोटो विमान में फोटो डायोड ले जाएं औरसुनिश्चित करें कि अनुवाद चरण में फोटो डायोड की सीमा अनुमानित छवि ( सीएफ। आकृति 4f ) के भीतर है।
- फोटो डायोड को बिजली की आपूर्ति और डीएक्यू कार्ड से कनेक्ट करें। ऑप्टिकल लेजर शक्ति के लिए 6 वी नियंत्रण वोल्टेज के लिए 40 डीबी प्रवर्धन का उपयोग करें। मोटर कंट्रोल पीसी के लिए गति नियंत्रक को नियंत्रण पीसी से कनेक्ट करें
नोट: एलपीपीटी तीव्रता सॉफ्टवेयर वी / 0.1 मिमी / एस की निरंतर वेग पर प्रबुद्ध क्षेत्र के माध्यम से पीनहोल फोटो डायोड के आंदोलन को नियंत्रित करता है और 100 डीएचएजी पर फोटो डायोड सिग्नल रिकॉर्ड करता है। लेज़र को सॉफ्टवेयर के माध्यम से भी नियंत्रित किया जाता है - छवि को स्कैन करने के लिए चित्रा 4f में दिखाए गए अनुसार 1 मिमी के चरण में माइक्रोमीटर पेंच का उपयोग करें। चित्र 6a-6b में दिखाए गए परिणाम देखें
- सुधार छवि की गणना करें
- बीम प्रोफाइल की अनोखीता को सही करने के लिए, बीम के बारे में उल्टे पिक्सेल मैट्रिक्स की गणना करेंप्रोफ़ाइल। किनारे की पहचान एल्गोरिथम का उपयोग करके अनुमानित छवि की सीमा को पहचानें।
- स्टेज वेग का उपयोग करते हुए स्थानिक जानकारी में समय की जानकारी को रूपांतरित करें पीडीके के पिक्सेल डोमेन को एक्स = 1,024 पिक्सल और y = 768 पिक्सल के साथ स्थानिक जानकारी बदल दें अधिकतम मूल्य पर डायोड सिग्नल को सामान्यीकृत करें।
नोट: सुधार के लिए संदर्भ स्तर सभी सामान्यीकृत छवियों के मूल्यों के साथ चुना गया था। क्षीणन के स्तर के साथ गणना की जाती है:
पी पिक्सल सामान्यीकृत डायोड तीव्रता प्रति पिक्सेल है। 1 से ऊपर पिक्सल एलसी के मान 1 के लिए सेट हैं - एक सफेद छवि के साथ सुधार मैट्रिक्स ( सीएफ। चित्रा 6 सी ) गुणा करें और सुधार को पर्याप्त था कि क्या यह जांचने के लिए प्रोफ़ाइल फिर से मापें ( सीएफ। चित्रा 6e-6 एच )।
2. नमूना तैयार करें
- पीडीके ( सीएफ। चित्रा 4e - स्थिति 1) के सामने ऑप्टिकल पथ में बिजली मीटर नियंत्रण इकाई से जुड़े 30 डब्ल्यू वाटर मीटर का सिर रखें। डायोड लेजर स्विच करेंएलपीपीटी लेजर कंट्रोल सॉफ़्टवेयर के साथ चरण 1 के i.1 से i.3 को i.1 के कम स्तर पर i.1 = 0.5 वी।
- Ρ = 7,850 किलो एम -3 , थर्मल चालकता कश्मीर = 54 W · m -1 · K -1 , और गर्मी क्षमता के घनत्व के साथ नमूना सामग्री के रूप में 100 मिमी x 100 मिमी x 40 मिमी के निर्माण वाले इस्पात के दो ब्लॉक का प्रयोग करें। का सी पी = 461 जे · के -1 -1 के -1
- चित्रा 7 में दिखाए गए अनुसार सतह के नीचे इलेक्ट्रिक निर्वहन मशीनिंग द्वारा 0.25 मिमी, 0.5 मिमी, 0.7 मिमी, 1.25 मिमी और 1 मिमी, 1.5 मिमी, 1.75 मिमी, 2 मिमी में दो ब्लॉकों में कृत्रिम दोष डालें।
- सुरक्षात्मक टेप के साथ दोषों को टेप करें समरूप अवशोषण के लिए शीर्ष सतह को सैंडब्लास्ट करें कोटिंग से पहले सुरक्षात्मक टेप वाले दोषों को टेप करें। एसीटोन का उपयोग कर सतह को गिरा दें
- 30 मिमी की दूरी से दो बार (0 डिग्री और 90 डिग्री) से ग्रेफाइट स्प्रे के साथ प्रबुद्ध क्षेत्र को कोट। अगर सजातीय सतह होती है तो कोटिंग सफल होती है यदि कोटिंग बरकरार नहीं है, तो degreasing शुरू और फिर से सफाई और दोहराएँकोटिंग चरण सतह सूखी ~ 2 घंटे सतह को छूने न दें, यह उत्सर्जन को बदल देगा।
- टेप निकालें और सुनिश्चित करें कि ग्रेफाइट उपसतह दोष में प्रवेश नहीं करता है।

3. प्रयोग को तैयार करें
- पीडीके और डायोड लेजर तैयार करें
- चरण 1.7 में वर्णित एक सफेद छवि को प्रोजेक्ट करें)। चरण 1.8 में वर्णित पीडीके की ऑप्टिकल इनपुट शक्ति की जांच करें) चरण 1.9 में दिखाए गए अनुसार पीडीके की ऑप्टिकल आउटपुट पावर की जांच करें)
- पावर मीटर नियंत्रण इकाई के लिए 500 डब्ल्यू पावर मीटर सिर कनेक्ट करें और यूएसबी-केबल के माध्यम से कंट्रोल कंप्यूटर (पीसी) को पावर मीटर संलग्न करें
- गति नियंत्रक तैयार करें और नमूना की स्थिति बनाएं।
- गति नियंत्रण नियंत्रक को अनुवाद चरण में और एक कंप्यूटर के माध्यम से यूएसबी केबल के माध्यम से कनेक्ट करें पीडी की तुलना में लगभग 80 मिमी की दूरी पर ऑप्टिकल अक्ष के लिए अनुवाद चरण ऑर्थोगोनल की स्थिति।
नोट: एलपीपीटी सॉफ्टवेरई, नियंत्रण कंप्यूटर पर चल रहे गति नियंत्रक को नियंत्रित करता है - पी = 0 एमएम लेंस को पीडीके उद्देश्य से संलग्न करें प्रोजेक्टर के चित्र विमान को खोजने के लिए पीडीके के लिए इनपुट फ्लैश स्रोत ( सीएफ। चित्रा 4 डी , क्रॉसहेयर को प्रवेश द्वार पर चिह्नित करें) के रूप में एलईडी फ्लैश लाइट का उपयोग करें।
- उद्देश्य के सामने 100 मिमी की लगभग एक दूरी पर कागज की एक श्वेत पत्र की स्थिति रखो और तेज चमकदार आयत के विमान को खोजने के लिए आगे और आगे बढ़ो, जो छवि विमान है।
- इस विमान में लेपित नमूना सतह की स्थिति। रैखिक अनुवाद मंच पर घुड़सवार लैब जैक का उपयोग करके नमूना की ऊंचाई निर्धारित करें। ऊँचाई चुनें कि प्रबुद्ध आयत के ऊपर नमूना ( सीएफ। चित्रा 4 जी ) के शीर्ष पर पहुंचता है। उस दोष की स्थिति बनाएं जिससे यह प्रबुद्ध क्षेत्र की सीमा के भीतर हो।
- डिवाइस को बंद करके और फिर से स्विच करके गति नियंत्रक शून्य।
- गति नियंत्रण नियंत्रक को अनुवाद चरण में और एक कंप्यूटर के माध्यम से यूएसबी केबल के माध्यम से कनेक्ट करें पीडी की तुलना में लगभग 80 मिमी की दूरी पर ऑप्टिकल अक्ष के लिए अनुवाद चरण ऑर्थोगोनल की स्थिति।
- कैमरा तैयार करें और सोने के दर्पण की स्थिति बनाएं।
- प्रोजेक्टर के लिए इनपुट प्रकाश स्रोत के रूप में एलईडी फ्लैश लाइट का उपयोग करें, नमूना को एक सफ़ेद छवि प्रोजेक्ट करने के लिए।
- ऊंचाई पर सोना दर्पण रखें, जिससे कि यह नमूना के ऊपरी किनारे को देखता है ( चित्रा 4 जी )। लगभग 35 डिग्री के कोण पर दर्पण सेट करें जैसा कि चित्रा 3 में दिखाया गया है। पीडीके उद्देश्य के करीब के रूप में सोने के दर्पण की स्थिति का निर्धारण करें, लेकिन प्रक्षेपण को ढंकना नहीं।
नोट: दर्पण को एक पोस्ट से माउंट किए गए पोस्ट होल्डर में संलग्न किया गया है। ऊंचाई और स्थिति clamps द्वारा तय कर रहे हैं। - आईआर कैमरा तिपाई को माउंट करें बुलसी स्तर के साथ आईआर कैमरा का स्तर आईआर कैमरा को पीडीके उद्देश्य की ऊंचाई पर समायोजित करें इसे इस तरह रखें कि यह प्रोजेक्टेड व्हाइट इमेज को सोना मिरर पर देखता है।
नोट: ऑप्टिकल मार्ग के साथ अनुमानित दूरी लगभग 1 मीटर है - आईआर कैमरा उद्देश्य और आईआर कैमरा के बीच स्पेसर की अंगूठी का प्रयोग करें। बनानासुनिश्चित करें कि फ्रेम हथियाने को ट्रिगर करने के लिए कैमरे का ट्रिगर इनपुट माप डेटा अधिग्रहण कार्ड से जुड़ा हुआ है। इसके अलावा, आईआर कैमरा नियंत्रण पीसी को लैन केबल के माध्यम से आईआर कैमरा पर कनेक्ट करें।
- कैमरे पर स्विच करें और वार्म-अप समय ( सीए 30 मिनट) के लिए कम से कम प्रतीक्षा करें ।
- आईआर कैमरा नियंत्रण सॉफ्टवेयर शुरू करें मेनू बार वस्तु को "कैमरा" में बदलें आईआर कैमरा ( सीएफ। चित्रा 8 ए, चरण i.1) को जोड़ने के लिए "कनेक्ट" बटन पर क्लिक करें।
नोट: कैमरा दृश्य की एक लाइव छवि दिखाता है - पैनल "रिमोट कंट्रोल" ( सीएफ। 8d , चरण i.2) को खोलने के लिए "रिमोट" बटन पर क्लिक करें। अंशांकन "एचएफ 100 मिमी (-10 डिग्री सेल्सियस -60 डिग्री सेल्सियस) 1140 μs" चुनें चित्र 8d , चरण i.2.1 देखें।
नोट: शोर को कम करने के लिए अंशांकन श्रेणी जितनी कम होनी चाहिए। - आईआर कैमरा को वें पर फोकस करने के लिए मैन्युअल रूप से लेंस फोकस रिंग समायोजित करेंई नमूना विमान
नोट: यह ज़रूरी है कि अधिक से अधिक स्थानिक रिज़ॉल्यूशन ( सीएफ। चित्रा 4 जी ) के लिए कैमरे का क्षेत्रफल अधिक से अधिक अनुमानित क्षेत्र के जितना बड़ा हो। किसी को आईआर कैमरे की स्थिति, ऊंचाई और अभिविन्यास बदलना पड़ सकता है। एक छवि तेज है या नहीं, यह तय करने के लिए, छवि विमान पर तापमान के विपरीत की जरूरत है एक स्टील शासक का इस्तेमाल इसके विपरीत करने के लिए किया जा सकता है। यदि आईआर छवि में अभी भी कम विपरीत है, तो कोई इसे चयन उपकरण ( सीएफ। चित्रा 8 सी , i.3) का उपयोग कर समायोजित कर सकता है। - बटन "एनयूसी" ( सीएफ। 8d , चरण i.2.2) को क्लिक करके एक गैर-एकरूपता सुधार करें। आईआर कैमरा उद्देश्य को कवर करें और "ठीक" बटन पर क्लिक करें।
- आईआर कैमरा पिक्सेल डोमेन और प्रोजेक्टर निर्देशांक के बीच के रिश्ते को निर्धारित करें।
- पीडीके पिक्सेल डोमेन, आईआर कैमरा पिक्सेल डोमेन और ले के बीच के रिश्ते को निर्धारित करेंनमूना सतह ( सीएफ। चित्रा 4 ग्राम, एच ) में एक सफेद छवि या पैटर्न पेश करके नमूने का एनगथ स्केल। एक स्टील शासक का उपयोग करके अनुमानित क्षेत्र को मापें, जो कि पीडीके डोमेन और नमूने के लम्बाई के पैमाने के बीच संबंध देता है।
- 21.3 मिमी x 16 मिमी (4: 3) के एक प्रबुद्ध क्षेत्र प्राप्त करने के लिए पी = पीडीके उद्देश्य से जुड़े एफ = 100 मिमी लेंस का प्रयोग करें।
नोट: पीडीके निर्देशांक में लम्बाई का स्तर है: 1 प्रोजेक्ड पिक्सेल = 21.3 मिमी / 1,024 पिक्सेल - पीडीके और आईआर कैमरे के बीच रिश्ते का पता लगाएं 10 वी के लिए चरण 1.9.3 दोहराएं)
- मेनू बार वस्तु को "माप" में बदलने के लिए आईआर कैमरा सॉफ्टवेयर का उपयोग करें "माप क्षेत्रों" टूल बार ( सीएफ। चित्रा 8 सी ), चरण i.4 से "क्रॉस टूल" चुनें। दिखाए गए फ्रेम पर बायी क्लिक करके परिणामी थर्मल चित्र के कोनों को चिह्नित करें
- गुण विंडो पर जाने के लिए क्रॉस पर राइट क्लिक करें "समन्वय" में बदलें और उन्हें रिकॉर्ड करेंबाद में थर्मल इमेज की पीडीके समन्वय प्रणाली में परिवर्तन।
4. प्रयोग को लागू करें
- प्रयोग को तैयार करें
- नमूना की लंबाई के पैमाने के सापेक्ष रोशनी क्षेत्र का अनुमान करें।
- 5.5 मिमी x 16 मिमी प्रति पैटर्न के प्रबुद्ध क्षेत्र को प्राप्त करने के लिए f = 100 मिमी लेंस का उपयोग करें। उन दोनों के बीच 5.5 मिमी x 16.5 मिमी का क्षेत्र चुनें, जो प्रबुद्ध नहीं है।
नोट: जिसके परिणामस्वरूप विकिरण लगभग 1.2 डब्ल्यू / सेमी² है।
- 5.5 मिमी x 16 मिमी प्रति पैटर्न के प्रबुद्ध क्षेत्र को प्राप्त करने के लिए f = 100 मिमी लेंस का उपयोग करें। उन दोनों के बीच 5.5 मिमी x 16.5 मिमी का क्षेत्र चुनें, जो प्रबुद्ध नहीं है।
- पीडीके पिक्सेल डोमेन के सापेक्ष इकाइयों में प्रदीप्ति क्षेत्र का अनुमान लगाएं।
- पीडीके के पिक्सेल डोमेन (1024 पिक्सल x 768 पिक्सल) को 3.4.2 के चरण में समीकरण का उपयोग करके प्रबुद्ध पैटर्न की स्थिति को रूपांतरित करें। [(512, 1) का प्रयोग करें; (512, 768)] पिक्सेल पीडीके डोमेन में कमी के रूप में, जो दोनों नमूनों के बीच सममित है।
- कुल फ्रेम की संख्या, माप समय और फ़्रेम पे की गणना करेंआर अवधि V = 0.05 मिमी / एस की गति को मानते हुए, x = 10 मिमी और पीडीके फ्रेम दर ƒ आर = 40 हर्ट्ज की एक यात्रा यात्रा दूरी, माप के समय टी = x / v = 200 s के माध्यम से गणना करें इसके अलावा, फ्रेम की संख्या की गणना करें ƒ = ƒ r • t = 8,000 Ƒ = 0.125 हर्ट्ज की उत्तेजना आवृत्ति के साथ, पी = नं ƒ / टी ƒ = 320 फ़्रेम / अवधि के साथ प्रति अवधि फ़्रेम की गणना करें।
नोट: इन मानों का अनुमानित चित्र उत्पन्न करने के लिए उपयोग किया जाएगा - सेटअप की जांच करें और सुनिश्चित करें कि लेजर सिस्टम, आईआर कैमरा और (वैकल्पिक) तापमान नियंत्रण डीएक्यू कार्ड से जुड़ा है। जांच करें कि 500 W पावर मीटर, पीडीके और रैखिक स्तर नियंत्रण पीसी से जुड़ा हुआ है या नहीं।
- नमूना की लंबाई के पैमाने के सापेक्ष रोशनी क्षेत्र का अनुमान करें।
- कैमरा नियंत्रण पीसी सेट करें
- आईआर कैमरा एक ट्रिगर इनपुट प्राप्त करते समय एक फ्रेम को पकड़ने के लिए आईआर कैमरा नियंत्रण सॉफ्टवेयर को कॉन्फ़िगर करें इसके लिए, एसपैनल के लिए चुड़ैल "कैमरा" और रिमोट कंट्रोल पैनल खोलने के लिए "रिमोट" बटन ( सीएफ। चित्रा 8 ए , चरण i.2) पर क्लिक करें। ड्रॉप-डाउन मेनू से "IO प्रक्रिया" चुनें ( चित्रा 8d , चरण i.2.3) और "सिंक इन" और "गेट" सक्षम करें और मेनू को बंद करें।
- "अधिग्रहण पैरामीटर" टैब के नीचे-दाएं कोने पर क्लिक करके अधिग्रहण मेनू खोलें ( सीएफ। चित्रा 8 ए, i.5)। ड्रॉप डाउन मेनू से "एक्सटेंशन / सिंक" चुनें ( सीएफ। चित्रा 8 बी, i.5.1)। "फ़ोल्डर" फ़ील्ड में फ़ाइल और फ़ोल्डर नाम दर्ज करके माप को नाम दें ( चित्र 8b , i.5.2 देखें)।
- 4.1.3 से "गणना" फ़ील्ड ( सीएफ। I.3.3) में गणना की गई कुल फ्रेम संख्या दर्ज करें। अधिग्रहण मेनू को बंद करें और आईआर कैमरा डेटा अधिग्रहण ( सीएफ। 8 , i.6) को शुरू करने के लिए "रिकॉर्ड" बटन पर क्लिक करें।
ध्यान दें:डीएक्यू कार्ड से ट्रिगर इनपुट होने पर रिकॉर्डिंग केवल तभी होगी
- प्रयोग करना
- एलपीपीटी नियंत्रण सॉफ्टवेयर शुरू करें "सक्रिय करें" पर क्लिक करके गति नियंत्रक को सक्रिय करें? बटन ( चित्रा 9 ए, i.1)। चित्रा 9 ए, i.1 में दिखाए अनुसार संगत नामित क्षेत्रों को संपादित करके "पैरामीटर", "एंडप्रॉज़िशन" = "-5 मिमी", "एंडपोजी" = "5 मिमी" और "वेग" = "0.05 मिमी / एस" सेट करें। "प्रारंभ मापन" बटन पर क्लिक करें ( चित्र 9 ए देखें, i.2 देखें)।
नोट: यदि यह स्पष्ट नहीं है कि दोष जहां स्थित है, तो एक उच्च गति पर एक बड़ा यात्रा दूरी चुनें। पीडीके के तापमान में वृद्धि पर ध्यान दें, और बनाई गई डेटा की मात्रा। ध्यान दें कि फ़्रेम चित्र बनाने के लिए एक यूजर इंटरफेस दिखाई देगा ( cf. 9b चित्र )। - अनुमानित फ्रेम चित्र उत्पन्न करें <ol>
- "चुनें एरिया रंग" फ़ील्ड पर बायाँ क्लिक करें। रंग संवाद से पैटर्न क्षेत्र के लिए एक रंग चुनें ( चित्रा 9 , i.3)। ऊपरी बाएं कोने में ड्राइंग टूलबार से 'आयत उपकरण' चुनें
- छवि क्षेत्र पर विस्तार करने पर बाईं तरफ क्लिक करके और धारण करके छवि क्षेत्र पर एक आयत बनाएं। चरण 4.1.2 से ट्रांसफ़ॉर्म किए गए पैटर्न निर्देशांक का उपयोग करें) बाईं ओर कोने में दिखाए गए आयत के निर्देशांक (i.4)। "परिभाषित क्षेत्र" बटन पर क्लिक करें ( चित्रा 9b , i.5)।
नोट: 5.5 मिमी पैटर्न आकार के लिए पीडीके डोमेन में संकलित पिक्सेल निर्देशांक हैं: आयत 1 (x1 = 116, y1 = 1; x2 = 380, y2 = 768), आयत 2 (x1 = 644, y1 = 1; x2 = 908, y2 = 768) "परिभाषित क्षेत्र" बटन पर क्लिक करने के बाद, पैटर्न गुणों को सेट करने के लिए एक संवाद दिखाई देगा।
- एलपीपीटी नियंत्रण सॉफ्टवेयर शुरू करें "सक्रिय करें" पर क्लिक करके गति नियंत्रक को सक्रिय करें? बटन ( चित्रा 9 ए, i.1)। चित्रा 9 ए, i.1 में दिखाए अनुसार संगत नामित क्षेत्रों को संपादित करके "पैरामीटर", "एंडप्रॉज़िशन" = "-5 मिमी", "एंडपोजी" = "5 मिमी" और "वेग" = "0.05 मिमी / एस" सेट करें। "प्रारंभ मापन" बटन पर क्लिक करें ( चित्र 9 ए देखें, i.2 देखें)।
- पैटर्न गुण सेट करें ( चित्रा 9 सी, i.6)।
- से "साइन लहर" चुनेंफ़ील्ड "सिग्नल प्रकार" पर बायी क्लिक करके ड्रॉप डाउन मेनू फ़ील्ड "चरण शिफ्ट" को "0 डिग्री", "फ़्रिक्वेंसी" से "0.125 हर्ट्ज" और "एक्सप्लिट्यूड" से "127" (पहले पैटर्न के लिए 0 का चरण बदलाव और π का चरण बदलाव के लिए) सेट करके दोलन पैरामीटर को परिभाषित करें दूसरा)।
- फ़ील्ड "वोल्टेज" के लिए "10" डालने से 10 वी के लेजर वोल्टेज सेट करें "चित्र / अवधि" फ़ील्ड को 4.1.3 से मूल्य का उपयोग करके 320 को पेस्ट करें)। "अगला" बटन दबाएं; यह पैनल बंद कर देता है
नोट: एलपीपीटी नियंत्रण सॉफ्टवेयर पीडीके के समाधान पर एक आवधिक छवि स्ट्रीम की गणना करता है। एक सफेद पिक्सेल का अर्थ है अधिकतम ऑप्टिकल शक्ति और एक काले पिक्सेल शून्य शक्ति, दो ऑस्केलेटिंग पैटर्न की गणना की जाती है। पहला पैटर्न का ग्रे मान पी 1 = 127 पाप (2π 0.125 हर्ट्ज टी ) + 127 और पी 2 = 127 पाप (2π 0.125 हर्ट्ज टी+ Π) + 127 ( चित्र 2 , ग्राफ देखें), जबकि समय टी को चुने हुए फ्रेम दर ( सीएफ। चरण 4.3.4) में अलग कर दिया गया है।
- दूसरा अनुमानित पैटर्न बनाएं
- दोहराएं चरण 4.3.2) और 4.3.3) चित्रा 9 के वर्कफ़्लो के बाद, लेकिन एक अलग रंग और "180 डिग्री" की एक अलग "चरण शिफ्ट" के साथ। अनुमानित पैटर्न की गणना करने के लिए "calc frames" बटन पर क्लिक करें पॉपड डायलॉग बॉक्स में "40 हर्ट्ज" पीडीके और आईआर कैमरा फ्रेम दर सेट करें
- सुधार छवि लोड करें
- चित्रा 9 बी के कार्यप्रवाह का पालन करें), कदम i.12। "लोड सुधार" पैनल चुनें और चरण 1.11 से कम्प्यूट की गई छवि के लिए फाइल प्रदान करें)। बटन पर क्लिक करके सुधार छवि लोड करें
- "प्रारंभ" बटन ( सीएफ। 9b , चरण i.13) पर क्लिक करके माप को प्रारंभ करें।
नोट: मंच चल रहा है, जबकि गणना फ्रेम्स नमूने पर पेश किया जाएगा आईआर कैमरा नियंत्रण सॉफ़्टवेयर द्वारा फ़्रेम्स का अधिग्रहण और गिना जाएगा - "रोक मापन" बटन ( सीएफ। चित्रा 9 ए, i.14) पर क्लिक करके सभी फ़्रेम्स (प्रगति बार = 100%) प्राप्त किए जाने पर माप को रोकें।
नोट: यदि क्लिक किया जाता है तो बटन का लेबल बदल जाएगा।
5. डेटा फ़ाइल पोस्ट प्रक्रिया
- एलपीपीटी पोस्ट प्रसंस्करण सॉफ्टवेयर शुरू करें "लोड" बटन पर क्लिक करें और फ़ाइल संवाद बॉक्स में मापन फ़ाइल चुनें। डाटा प्रसंस्करण ( सीएफ। चित्रा 10 ए ) पोस्ट करने के लिए कैमरा डेटा प्रारूप को बदलने के लिए "ठीक" पर क्लिक करें।
नोट: आईआर कैमरा डेटा एक देशी प्रारूप में आईआर कैमरा नियंत्रण पीसी पर संग्रहीत किया जाता है। आईआर कैमरा नियंत्रण सॉफ्टवेयर विकास किट का उपयोग आईआर कैमरा अनुक्रम को 3-आयामी मैट्रिक्स (पिक्सेल एक्स, पिक्सेल वाई, फ़्रेम नंबर) और एकएक टाइमिंग वेक्टर टी सहित हेडर - आईआर कैमरा डेटा को पीडीके डोमेन ( सीएफ। आकृति 10 बी) में बदलें, चरण 4.3.3 से पी 4 एक्स के लिए चार प्रोजेक्शन पॉइंट के निर्देशांक डालें, और "ट्रांसफ़ॉर्म" क्लिक करें।
नोट: आईआर कैमरा ( सीएफ। आकृति 4 जी ) के लिए सोने के दर्पण के माध्यम से छवि प्रक्षेपण के कारण, परिणामी आईआर छवि विकृत हो जाती है। आईपी कैमरा डोमेन से पीडीके डोमेन तक एक एनीमेशन ज्यामितीय परिवर्तन किया जाता है। परिणाम 1,024 x 768 x फ्रेम संख्या का एक मैट्रिक्स है। - निकासी लाइन ( सीएफ। चित्रा 10 सी) पर तापमान जानकारी निकालें।
- दो अंक एल 1 और एल 2 वाले फ़ील्ड्स को एल 1 एक्स = एलएक्स 2 = "512" पिक्सेल भरने के द्वारा कमी की रेखा को परिभाषित करें क्योंकि यह चरण 4.1.2 में पहले से चुना गया था)। L1y = "343" से L2y = "3 9 3" चुनें। चित्र 10 सी देखें
नोट: चरण 5.2 में परिवर्तन के कारण), डेटा हो सकता हैतुरंत पुनर्प्राप्त, लेकिन साइड इफेक्ट होते हैं क्योंकि नमूना केवल आंशिक रूप से प्रकाशित होता है इसलिए, पैटर्न के किनारे क्षेत्रों का मूल्यांकन नहीं करें यदि शोर अभी भी बहुत अधिक है, तो y का आकार बढ़ाया जा सकता है। - निम्न क्षेत्रों को भरकर आईआर कैमरे के लिए प्रयोगात्मक मापदंडों को सेट करें: फ़्रेम्रेट को "40" हर्ट्ज़ के रूप में, "0.125" हर्ट्ज़ के रूप में आवृत्ति, वेग 0.0 "" 0.05 "मिमी के रूप में और एक्स-स्टार्ट की स्थिति" -5 "मिमी ( cf. चित्रा 10 सी ) डेटा पोस्ट प्रसंस्करण के लिए पैरामीटर सेट करें: "फिट डिग्री" = "7", "स्मूथिंग" = "20", और "हिल्बर्ट" = "500" जैसा कि चित्र 10 सी में है
नोट: कमी की गई रेखा पर निकाली जाने वाला डेटा जियोमेटिक रूप से औसत होता है। बाद में, वैकल्पिक तापमान शब्द Δ टी ( चित्रा 11 ए, बी देखें ) एक बहुपक्षीय फिट (फ़िट डिग्री) प्रदर्शन करके पुनर्प्राप्त किया गया है। परिणामी सिग्नल एक चल औसत फिल्टर (स्मूथिंग) द्वारा चिकनी होता है।अंत में, एक हिल्बर्ट परिवर्तन को तत्काल आयाम प्राप्त करने के लिए लागू किया जाता है। अवशिष्ट लहर को कम करने के लिए एक और बढ़ते औसत फिल्टर (हिल्बर्ट) का उपयोग किया जाता है आयाम न्यूनतम पर जानकारी का उपयोग करना, छिपे हुए दोष की स्थिति प्राप्त होती है। - डेटा विश्लेषण करने के लिए "मूल्यांकन करें" पर क्लिक करें क्षेत्र "क्रैंकपोज़ी [मिमी]" से दोष की गणना की स्थिति पढ़ें। दोष की स्थिति चित्रा 10 डी की खिड़की में दिखायी गई है।
- दो अंक एल 1 और एल 2 वाले फ़ील्ड्स को एल 1 एक्स = एलएक्स 2 = "512" पिक्सेल भरने के द्वारा कमी की रेखा को परिभाषित करें क्योंकि यह चरण 4.1.2 में पहले से चुना गया था)। L1y = "343" से L2y = "3 9 3" चुनें। चित्र 10 सी देखें

चित्रा 3: हाइलाइट किए गए ऑप्टिकल पथ (लाल रेखा) के साथ प्रयोगात्मक सेटअप की तस्वीर लेजर फाइबर माउंट डायोड लेजर के फाइबर से जुड़ा हुआ है। बीम को दूरबीन द्वारा पीडीके के प्रवेश व्यास में समायोजित किया जाता है। पीडीके में प्रवेश करने से पहले, बीम बीम नमूना द्वारा विभाजित किया जाता है और बिजली मीटर द्वारा मॉनिटर किया जाता है। पीडीके के अंदर, बीम को एक को समरूपित किया जाता हैडीएमडी को अनुमानित अनुमान पीडीएम, एलपीपीटी नियंत्रण सॉफ्टवेयर द्वारा नियंत्रित, नमूना के लिए प्रदीप्ति पैटर्न पेश करता है। प्रक्षेपित प्रकाश को फोटोटमेल रूप से कनवर्ट किया जाता है और नमूना को गर्म करता है। नमूना सतह से उत्सर्जित थर्मल विकिरण (नारंगी रेखा) के माध्यम से तापमान आईआर कैमरा द्वारा मापा जाता है। नमूना खुद रैखिक अनुवाद मंच पर तैनात है इस आंकड़े के एक बड़े संस्करण को देखने के लिए कृपया यहां क्लिक करें

चित्रा 4: प्रायोगिक सेटअप के समायोजन को दिखाए जाने वाले फोटो अनुक्रम ( ए ) प्रायोगिक सेटअप का शीर्ष दृश्य एक सिंहावलोकन दिखाता है। ( बी ) दूरबीन के संरेखण: लेसर बीम के ऑप्टिकल अक्ष को लेंस के केंद्र में करने के लिए क्रॉसहेयर का उपयोग किया जाता है। ( सी ) ऑप्टिकल तत्वों को संरेखित करें: एक बार सिस्टम माउंटऑप्टिकल पीठ के लिए डी का उपयोग बेंच के सापेक्ष ऑप्टिकल बीम को संरेखित करने के लिए किया जाता है। एक ऊँचाई तय आईरिस का उपयोग बेंच के समानांतर बेंच को रखने के लिए किया जाता है। ( डी ) प्रोजेक्टर और बीम के बीच युग्मन बिन्दु के साइड व्यू के फोटो। प्रोजेक्टर को बीम में संरेखित करने के लिए क्रॉसहेयर का उपयोग किया जाता है ( ई ) प्रोजेक्टर सिस्टम के संचरण का निर्धारण: प्रोजेक्टर के पहले और बाद में ऑप्टिकल शक्ति को मापने के लिए बिजली मीटर का उपयोग किया जाता है। ( च ) बीम प्रोफाइल का निर्धारण: पिनहोल और एनडी 1 फ़िल्टर डायोड पर लगाए जाते हैं जो प्रक्षेपित छवि के माध्यम से दो रेखीय चरणों के माध्यम से ले जाया जाता है। प्रोजेक्टर को एक सफेद छवि प्रोजेक्ट करने के लिए कॉन्फ़िगर करना होगा। ( छ ) इन्फ्रारेड कैमरे की स्थिति को सोने के दर्पण के माध्यम से नमूना पर भेजना: नमूना को प्रोजेक्टर के चित्र विमान में तैनात करना होगा। बिजली घनत्व को नियंत्रित करने के उद्देश्य से उद्देश्य से जुड़े उद्देश्य और अतिरिक्त लेंस का उपयोग किया जा सकता है। ( एच ) निर्धारणअनुमानित छवि, आईआर कैमरा छवि और नमूने की वास्तविक लंबाई के बीच के पैमाने का। इस आंकड़े के एक बड़े संस्करण को देखने के लिए कृपया यहां क्लिक करें

चित्रा 5: सॉफ्टवेयर स्क्रीनशॉट। ( ए ) एलपीपीटी लेजर नियंत्रण सॉफ्टवेयर का स्क्रीनशॉट। ( बी ) पीडीके कंट्रोल सॉफ़्टवेयर: i.1 से i.3 के लिए चरण दिखाता है कि पीडीके को एक सामान्य प्रोजेक्टर के रूप में कैसे कॉन्फ़िगर किया जाए। इस आंकड़े के एक बड़े संस्करण को देखने के लिए कृपया यहां क्लिक करें

चित्रा 6: इन्होमोनेएस बीम प्रोफ़ाइल का सुधार। ( ए ) प्रोजेक्ट किए गए सफेद इमेज के बीम प्रोफाइल (पूर्ण रोशनी) द्वारा लिया गया फोटो डायोड जो प्रोफ़ाइल के माध्यम से ले जाया गया था डेटा बीच में एक प्रमुख चोटी के साथ एक इनमोमोनेएस बीम प्रोफाइल को दिखाता है। ( बी ) लाल रेखा से संबंधित क्रॉस सेक्शन लाइन प्रोफाइल) ( सी ) सुधार छवि जो प्रक्षेपित सफेद छवि के साथ एसएलएम पर पड़ी हुई है ताकि अमानवीयता के स्तर को कम किया जा सके। ( डी ) लाल रेखा की इसी क्रॉस सेक्शन लाइन प्रोफाइल सी)। ( ई ) सुधार के बाद एक प्रोफाइल को एक शीर्ष टोपी प्रोफ़ाइल के करीब दिखाने के बाद बीम प्रोफ़ाइल का परिणाम। ( एफ ) लाल रेखा के संबंधित क्रॉस सेक्शन लाइन प्रोफाइल ई)। ( जी ) दो सही पैटर्न के रोशनी प्रोफ़ाइल पैटर्न समान आवृत्ति और आयाम के साथ modulated जाएगा लेकिन पैटर्न के बीच विध्वंसकारी हस्तक्षेप के एक क्षेत्र बनाने के विरोध चरणों के साथ। ( एच ) लाल रेखा के संबंधित क्रॉस सेक्शन लाइन प्रोफाइल जी)। Ve.com/files/ftp_upload/55733/55733fig6large.jpg "target =" _ blank "> कृपया इस आंकड़े के एक बड़े संस्करण को देखने के लिए यहां क्लिक करें।

चित्रा 7: नमूना तैयार करना ( ए ) नमूना सतह का चित्र काले लेपित संरचनात्मक इस्पात St37 (20 मिमी x 0.5 मिमी x 15 मिमी) का एक ब्लॉक दिखा रहा है। ( बी ) उपसतह दोष के पारदर्शी सीएडी ड्राइंग दोष सही पक्ष से 40 मिमी स्थित हैं। ( सी ) सतह के नीचे अलग गहराई पर आदर्श दोष दिखाए जाने वाले नमूनों की साइड व्यू फोटो (साइड 1 = 0.25 मिमी, साइड 2 = 0.5 मिमी, साइड 3 = 0.7 मिमी, साइड 4 = 1.25 मिमी)। गर्मी के नुकसान को कम करने के लिए नमूना पक्ष अनोखा हैं दूसरा नमूना (दिखाया नहीं) में इसके उपसतह दोष हैं: पक्ष 1 = 1 मिमी, पक्ष 2 = 1.5 मिमी, साइड 3 = 1.75 मिमी, साइड 4 = 2 मिमी= "_ Blank"> कृपया इस आंकड़े के एक बड़े संस्करण को देखने के लिए यहां क्लिक करें।

चित्रा 8: आईआर कैमरा नियंत्रण सॉफ्टवेयर के स्क्रीनशॉट। I.1 से i.5 के कदम डेटा अधिग्रहण के लिए आईआर कैमरा को कॉन्फ़िगर कैसे करें। ( ए ) "कैमरा" पैनल का स्क्रीनशॉट: आईआर कैमरा "कनेक्ट" बटन के माध्यम से आईआर कैमरा नियंत्रण पीसी से जोड़ा जा सकता है। "दूरस्थ" नियंत्रण कक्ष (बी) और अधिग्रहण पैनल (डी एंड ई) यहां से पहुंचा जा सकता है। इसके अलावा, माप "रिकॉर्ड" बटन के माध्यम से शुरू किया जा सकता है ( बी ) "अधिग्रहण" पैनल का स्क्रीनशॉट: यदि कोई 5 वी टीटीएल ट्रिगर प्राप्त करता है तो एक फ्रेम को कैप्चर करने के लिए आईआर कैमरा को "एक्सटेंशन / सिंक" के माध्यम से कॉन्फ़िगर किया जाना चाहिए। ( सी ) "उपाय" पैनल का स्क्रीनशॉट: डेटा प्रदर्शन सीमा को "चयन" बटन से समायोजित किया जा सकता है बिंदु और रेखा उपकरणआईआर कैमरा छवि को वास्तविक दुनिया निर्देशांक में जांचने के लिए उपयोग किया जाता है। ( डी ) आईआर कैमरा रिमोट कंट्रोल "कैलिब्रेशन" पैनल का स्क्रीनशॉट उच्च संवेदनशीलता प्राप्त करने के लिए एक छोटी सी माप श्रेणी (-10 से 60 डिग्री सेल्सियस) को चुना जाना चाहिए। ( ई ) आईआर कैमरा रिमोट कंट्रोल पैनल: आईआर कैमरा ट्रिगर करने के लिए "प्रोसेस आईओ", "आईएन 1" और "इन 2" सक्षम होना चाहिए इस आंकड़े के एक बड़े संस्करण को देखने के लिए कृपया यहां क्लिक करें

9 चित्र: एलपीपीटी नियंत्रण सॉफ्टवेयर के स्क्रीनशॉट। सॉफ़्टवेयर के साथ उपयोगकर्ता इंटरैक्शन के लिए कार्यप्रवाह को i.1 से i.14 के रूप में चिह्नित किया गया है। ( ए ) एलपीपीटी मुख्य पैनल का स्क्रीनशॉट; "सक्रिय?" एक बूलियन प्रकार है और मंच को सक्रिय करता है यदि यह सच है। "स्टार्ट-एंड" एंडपोसीTion "मिमी के चरण के पैरामीटर हैं। फ़ील्ड" वेग "को मिमी / एस में परिभाषित किया जाता है।" प्रारंभ मापन "बटन मापन शुरू होता है, पैनल (बी) में दिखाए गए डायलॉग बॉक्स को खोलता है और यदि झूठी माप रोकता है। ( बी ) नमूना के लिए प्रारम्भिक पैटर्न बनाने के लिए उपयोग किया जाने वाला यूजर इंटरफेस का स्क्रीनशॉट। एक रंग को पिक्सेल के क्षेत्र का प्रतिनिधित्व करने के लिए चुना जाता है। क्षेत्र को छवि में आयताकार खींचकर चुना जाता है.यदि बटन "परिभाषित क्षेत्र" दबाया जाता है, पैनल (सी) में दिखाए गए पैनल को क्षेत्र के गुणों को परिभाषित करने के लिए पॉप अप किया जाएगा। सभी क्षेत्रों को परिभाषित करने के बाद बटन "कैल्श फ्रेम्स" छवियों के एक सेट की गणना करेगा। "लोड सुधार" सुधार लोड करने के लिए एक डायलॉग बॉक्स प्रदान करेगा इन्होमोजोनेस बीम प्रोफाइल से बचने के लिए छवि। बटन "प्रारंभ" माप शुरू करेगा ( सी ) एक पैटर्न के गुणों को सेट करने के लिए इस्तेमाल किया यूजर इंटरफेस का स्क्रीनशॉट। ऊपरी फ्रेम संकेत प्रकार (साइन लहर), चरण बदलावहज़ारों में डिग्री और आवृत्ति में निचला फ्रेम प्रति अवधि फ्रेम, 1 से 127 से आयाम और लेजर वोल्टेज (0 वी से 10 वी = 0 डब्लू से 500 डब्ल्यू) को दर्शाता है। फ्रेम्स प्रति अवधि यह मान है कि कितनी बारीकी से अवधि अलग-अलग हो जाती है। बटन "अगला" (आगे) धक्का जाने के बाद, एक डायलॉग बॉक्स पॉप अप हो जाता है और हर्ट्ज में कैमरे के फ्रेम दर और हर्ट्ज में फ़्रेम स्विचिंग स्पीड के लिए पूछता है। इस आंकड़े के एक बड़े संस्करण को देखने के लिए कृपया यहां क्लिक करें

10 चित्रा: एलपीपीटी पोस्ट प्रोसेसिंग सॉफ्टवेयर के स्क्रीनशॉट। ( ए ) देशी आईआर कैमरा डेटा प्रारूप लोड और परिणत। ( बी ) ट्रांसफॉर्मेशन प्वाइंट P1x से P4y का उपयोग करके प्रोजेक्टर समन्वय प्रणाली के लिए फ़्रेम मैट्रिक्स को ट्रांसफ़ॉर्म करें ( सी ) L1x से L2y मूल्यांकन रेखा के पिक्सेल निर्देशांक दर्शाते हैं और# 34; v "," xStart "," framerate "और" आवृत्ति "प्रायोगिक पैरामीटर हैं।" V "मिमी / s में वेग है, मिमी में चरण की प्रारंभिक स्थिति" xStart "," फ़्रेम्रेट "और" फ़्रिक्वेंसी "ह्ज़ में दिए गए हैं" फिट डिग्री "," चिकनाई "और" हिल्बर्ट "मूल्यांकन मानदंड हैं। फिट डिग्री बहुपद फिट की डिग्री का प्रतिनिधित्व करती है," चौरसाई "शोर को कम करने के लिए प्रयुक्त चलती औसत फिल्टर के लिए तत्वों की संख्या को दर्शाता है "हिल्बर्ट" पैरामीटर को वक्र के न्यूनतम स्तर को खोजने के लिए चौरसाई का स्तर सेट करने के लिए प्रयोग किया जाता है। ( डी ) एक लंबवत बिंदीदार रेखा के रूप में दरार की स्थिति दिखाते हुए परिणाम का स्क्रीनशॉट । इस आंकड़े के एक बड़े संस्करण को देखने के लिए कृपया यहां क्लिक करें।
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
प्रोटोकॉल के बाद, 0.25 मिमी की गहराई पर उपसतह दोष के साथ इस्पात के नमूने की ओर 1 प्रतिनिधि परिणाम उत्पन्न करने के लिए चुना गया था। यह दोष प्रारम्भिक रूप से प्रबुद्ध क्षेत्र के मध्य में स्थित था। नमूना को 0.05 मिमी / एस की गति से रैखिक चरण के माध्यम से -5 मिमी से 5 मिमी में स्थानांतरित किया गया था इन पैरामीटरों का उपयोग करते हुए, चित्रा 11 ए उन्हें कमी करने वाली रेखा से निकालने के बाद स्कैन डेटा दिखाता है। इस स्तर पर, प्रयोग की सफलता का अनुमान लगाया जा सकता है, क्योंकि आईआर कैमरा कंट्रोल सॉफ्टवेयर से एक पूर्वावलोकन के रूप में कच्चे डेटा उपलब्ध है (वैकल्पिक: डेटा का पूर्वावलोकन करने के लिए लाइन उपकरण का उपयोग करें, cf। चित्रा 8 , चरण i.4) । आगे संकेत के बाद प्रसंस्करण के बाद, चित्रा 11b में हिल्बर्ट वक्र (नीला) की न्यूनतम 0.3 मिमी पर दोष स्थिति दिखाती है।
प्रयोग को मान्य करने के लिए, वक्र को एच होना चाहिएनिम्न गुणों का पालन करें: यह सममित होना चाहिए, सममिति विमान पर एक स्पष्ट न्यूनतम और उसके बराबर अधिकतम और दो बराबर है। मैक्सिमा उत्पन्न होती है क्योंकि दोष पर गर्मी के संचय के कारण किसी दूसरे स्रोत से गर्मी प्रवाह दूसरे पर हावी हो जाता है। यह विशेष रूप से मामला है जब दोष सममिति विमान के करीब स्थित है। दोष गर्मी प्रवाह के लिए एक बाधा बनाता है इसलिए हम हावी स्रोत के गर्मी प्रवाह को देख सकते हैं और दोष से उसके प्रतिबिंब देख सकते हैं। यदि दोष मध्य में सममित रूप से तैनात है, तो गर्मी प्रवाह समान रूप से विभाजित होता है, जो न्यूनतम 1 में होता है ।
स्कैन गति का प्रभाव चित्र 11 सी में दिखाया गया है। यहां, स्कैन की गति को दोगुनी होकर 0.1 मिमी / एस करने के लिए एक ही दोष का मूल्यांकन। इससे पहले, एक अलग रिश्तेदार स्थिति हासिल करने के लिए नमूना को मंच पर थोड़ा स्थानांतरित किया गया था। दोष स्थिति निर्धारित किया गया थाहोना -2 मिमी विस्तार का स्तर चित्रा 11 ए में दिखाए गए आंकड़ों के समान था, प्रयोग की अच्छी प्रजनन क्षमता का प्रदर्शन, लेकिन कम दोलनों के साथ चूंकि अधिक से अधिक बढ़ाव दोष की गहराई के साथ जुड़ा हुआ है, स्थिति और गहराई के बारे में जानकारी अच्छी तरह से 1 के रूप में बनाए रखा जा सकता है।
चित्रा 11d एक उप-योग डेटासेट दिखाता है। दोष सतह के नीचे 1 मिमी था, जो लगभग इस प्रसार लंबाई और उपलब्ध ऑप्टिकल शक्ति की पहचान सीमा पर है। हालांकि दोष का स्थान अभी भी निर्धारित किया जा सकता है, माप की अनिश्चितता अधिक है क्योंकि शून्य दोलन का स्थान शोर से पहले से प्रभावित है। इस व्यवहार से, हम अनुमान लगा सकते हैं कि दोष का पता लगाने के प्रयोग की विफलता के लिए सबसे स्पष्ट संकेत हैं, यदि कमी की रेखा पूरी तरह से खत्म हो जाती है या एक मजबूत विषम व्यवहार होता है। यह follo के कारण हो सकता हैविंग के कारण: (i) आईआर कैमरे के स्थानिक रिज़ॉल्यूशन पर्याप्त नहीं है और कमी की रेखा को ठीक तरह से हल नहीं किया जा सकता है, (ii) तापमान वृद्धि के मुकाबले कैमरे का शोर बहुत ऊंचा है, (iii) रोशनी पैटर्न असहिष्णु और सही ढंग से ठीक नहीं किया गया है, (iv) रोशनी पैटर्न के मॉडुलन आवृत्ति की तुलना में, चयनित चरण वेग बहुत अधिक है, और (v) थर्मल प्रसार लंबाई (मॉडुलन आवृत्ति के माध्यम से) दोष के लिए अनुकूल नहीं है गहराई।

चित्रा 11: उपसतह दोषों का पता लगाने के लिए प्रयोगों से प्रतिनिधि डेटासेट। ( ए ) St37 नमूने से प्रतिनिधि प्रायोगिक डेटा, 0.25 मिमी की गहराई पर एक दोष के साथ 1 पक्ष। काला रेखा समय के साथ तापमान सूचना दिखाती है (शीर्ष अक्ष) एक velocity v = 0.05 मिमी / एस पर मंच का अनुवाद करके, स्थिति हैपुनर्प्राप्त (नीचे अक्ष) लाल वक्र एक बहुपद फिट (7 डिग्री) को वैकल्पिक तापमान घटक हासिल करने के लिए उपयोग किया जाता है। धराशायी लाल रेखा उपसतह दोष की स्थिति को दर्शाती है। ( बी ) काले वक्र पैनल के तापमान डेटा से बहुपक्षीय फिट को घटाकर वैकल्पिक तापमान ग्राफ को दर्शाता है (ए)। ब्लू वक्र काले वक्र और औसत करने के लिए हिल्बर्ट परिवर्तन को लागू करके प्राप्त किया गया था। ( सी ) 0.1 मिमी / एस के चरण वेग पर -7 मिमी से 3 मिमी की एक सीमा के ऊपर एक ही पक्ष के प्रतिनिधि प्रायोगिक डेटा आवृत्ति आधा है लेकिन विस्तार पैनल के समान है (ए)। ( डी ) उपसतह दोष 1 मिमी की गहराई पर था जब अधिग्रहण योग्य प्रयोगात्मक डेटा। इस आंकड़े के एक बड़े संस्करण को देखने के लिए कृपया यहां क्लिक करें
Subscription Required. Please recommend JoVE to your librarian.
Discussion
प्रस्तुत प्रोटोकॉल का वर्णन है कि कैसे सतह पर लंबवत कृत्रिम उपसतह दोषों का पता लगाने के लिए। इस पद्धति का मुख्य विचार अवरुद्ध थर्मल तरंग क्षेत्र बनाने के लिए है जो उपसतह दोष के साथ बातचीत करते हैं। सबसे महत्वपूर्ण कदम हैं (i) नमूना सतह पर दो वैकल्पिक उच्च शक्ति रोशनी पैटर्न बनाने के लिए डायोड लेजर के साथ एसएलएम को संयोजित करना; इन पैटर्नों को सुगम तापीय लहर क्षेत्रों में परिवर्तित कर दिया जाता है, (ii) उन्हें एक उपसतह दोष के साथ बातचीत करने में विनाशकारी रूप से हस्तक्षेप करने के लिए, और (iii) थर्मल इमेजिंग का उपयोग करते हुए नमूना सतह के गतिशील तापमान की सतह स्कैन से इन दोषों का पता लगाने के लिए आईआर कैमरा चूंकि तापमान धीरे-धीरे बदलते मूल्य के आसपास रिश्तेदार दोलन होता है, परन्तु पूर्ण तापमान मान की आवश्यकता नहीं होती है, इसलिए यह दृष्टिकोण छिपे हुए दोषों 1 के लिए अत्यंत संवेदनशील है।
सबसे महत्वपूर्ण कदमों में से एकप्रोटोकॉल के भीतर, संरक्षित हीटिंग के लिए एक SLM- युग्मित लेजर स्रोत का उपयोग करते समय रोशनी बीम प्रोफ़ाइल की पर्याप्त एकरूपता स्थापित करना है (चरण 1.10 देखें)। डायोड लेजर एक उच्च विकिरण प्रदान करता है लेकिन इसे सही बीम व्यास और दिशा के साथ एसएलएम युक्त प्रोजेक्टर में खिलाया जाना चाहिए। प्रोजेक्टर के भीतर स्वामित्व ऑप्टिकल पथ के साथ थोड़ा अपरिहार्य ज्यामितीय और वर्णक्रमीय बेमेल के कारण, नमूना पर उत्पन्न छवि विकृत हो जाती है। इसलिए, अनुमानित छवि को नियंत्रित करने वाली छवि तीव्रता मानों का एक संख्यात्मक सुधार एक संदर्भित बीम प्रोफ़ाइल माप के साथ किया जाता है। सफल प्रयोग के लिए दूसरा महत्वपूर्ण कदम आईआर छवि के एक उच्च स्थानिक संकल्प को प्राप्त करना है (3.3.7- 3.3.8 चरण देखें)। कमी क्षेत्र को पर्याप्त रूप से विभेदित किया जाना चाहिए, और कोई कमी नहीं है और इसलिए कोई दोष स्थिति मापा जा सकता है।
प्रयुक्त थर्मल तरंगों की प्रकृति एक प्रसार की तरह हैप्रक्रिया जो कुछ ही मिलीमीटर से केवल अपने आयाम के एक मजबूत क्षीणन की ओर जाता है हम प्रकाश स्रोत के रूप में एक उच्च शक्ति डायोड लेजर का उपयोग करके इस आंतरिक भौतिक सीमा को पूरा करते हैं। वर्तमान प्रायोगिक सेटअप की बाधा एसएलएम 21 की थर्मल तनाव सीमा है, जिसका अर्थ है कि उपलब्ध लेजर पावर का केवल एक अंश लागू किया जा सकता है। हमारा वर्तमान समाधान एक काले ग्रेफाइट कोटिंग के साथ नमूना सतह को कोट करना है। भविष्य में, हम उम्मीद करते हैं कि ऊपरी संवेदनशीलता वाले ऑप्टिमाइज्ड लाइट इंजन या यहां तक कि स्विच करने योग्य डायरेक्ट लेजर एरेज़ जैसे उच्च-शक्ति खड़ी-गुहा सतह-उत्सर्जन लेजर (वीसीएसईएल) एरेज़ 22
इस पद्धति और गैर-विनाशकारी परीक्षण में मौजूदा थर्मल इमेजिंग के बीच मुख्य अंतर यह तथ्य है कि हम पूरी तरह से सुसंगत थर्मल तरंग क्षेत्रों के विनाशकारी हस्तक्षेप का उपयोग करते हैं; जो व्यक्ति ली के सेट के आयाम और चरण पर नियंत्रण रखने के बाद ही संभव हैएक नियतात्मक तरीके से ght स्रोत। मौजूदा थर्मोग्राफिक विधियों के भीतर, स्थानिक डोमेन में नियंत्रित समय के समय में नियोजित एक प्लैनर प्रकाश स्रोत, या एक एकल केंद्रित लेजर स्पॉट का उपयोग किया जाता है। हमारे दृष्टिकोण का प्रमुख लाभ नमूना सतह पर लंबवत झूठ दोषों की उच्च संवेदनशीलता है।
इस प्रकार अब तक, केवल दो व्यक्तिगत प्रकाश स्रोत बनाए गए हैं। लेजर युग्मित एसएलएम के साथ हम सिद्धांत रूप में, एक लाख व्यक्तिगत प्रकाश स्रोतों को उत्पन्न और नियंत्रित कर सकते हैं - नमूना सतह पर एक मिलियन गर्मी स्रोत। स्पष्ट रूप से इस दृष्टिकोण को लंबे समय तक स्वैच्छिक तापीय तरंग की संभावनाओं को खुलता है और अल्ट्रासाउंड या रडार से सक्रिय थर्माफोग्राफी के क्षेत्र में भौतिक सीमाओं के भीतर स्थानांतरण तकनीकें शुरू होती हैं। एक बार ऊपर उल्लिखित विरोधाभास चुनौती ( अर्थात् ऑप्टिकल पावर प्रति प्रक्षेपित पिक्सेल) को संतोषजनक रूप से हल किया जाता है, यहां तक कि सतह के नीचे स्थित गहरे गहरे दोषों को भी स्कैन किया जाना चाहिए। अब तक,स्टील का परीक्षण किया गया है, लेकिन विधि विशेष रूप से प्लास्टिक, मिश्रित सामग्री, और अन्य संवेदनशील सामग्री के लिए बहुत कम हो रही है, क्योंकि निम्न थर्मल तनाव लागू होते हैं।
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
लेखकों के पास खुलासे के लिए कुछ भी नहीं है।
Acknowledgments
हम प्रायोगिक सेटअप की तस्वीरें लेने और साथ ही आंकड़ा प्रकाशन के लिए तैयारी करने के लिए तेरना स्टडमुंड और हैजेन वेंडल का शुक्रिया अदा करना चाहेंगे। इसके अलावा, हम नमूना तैयार करने और श्रीधर उन्नीकृष्णुकुप, अलेक्जेंडर बाटिग और फेलिक्स फ्रिट्ज़ के लिए एनी हल्डेब्रेंड का सबूत पढ़ने के लिए धन्यवाद करना चाहते हैं।
Materials
| Name | Company | Catalog Number | Comments |
| 500 W diode laser system, 940 nm | Laserline | LDM 500 - 20 | Pilot laser class 2 @ 650 nm, diode laser is a class 4 laser system --> special laboratory needed |
| Laser control box | Laserline | Laser control box LDM | Add on to the laser system, used to switch electronically, laser threshold, shutter, laser on 0 V..5 V TTL |
| Control box scanner | Laserline | Add on to the laser system, used to adjust the optical output power via analog signal from 0 V..10 V | |
| Fiber Laser Mount 2", f = 80 mm | Laserline | Add on to the laser system | |
| Multifunction Data Aquisition (DAQ) Device + BNC Terminal | National Instruments | NI-USB 6251 | The DAQ card is used to trigger the IR camera, the DLP Light Commander 5500, control Laser and diode PDA 36A |
| Standard - PC | Control PC - graphic card for two screens, at least 4 x USB, Windows based | ||
| BNC cabel | Standard cable | ||
| HDMI cable | Standard cable | ||
| Micro USB to USB cable | Standard cable | ||
| LabVIEW 2013 SP1 Development System | National Instruments | Development environment for device control | |
| LPPT control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT intensity software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT laser control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| Matlab 2016b | MathWorks | Postprocessing of the measurement data | |
| LPPT postprocessing software | BAM | Postprocessing of the measurement data | |
| IR camera control PC | InfraTec | Control PC is supplied by camera distributor | |
| IR camera control software | InfraTec | Irbis 3 Professional | |
| InfraTec SDK | InfraTec | Dynamic Link Library as interface between the native data aquisition format of Infratec and Matlab | |
| IR camera | InfraTec | Image IR 8300 | 640 x 512, cooled InSb detector, wavelength 2 µm..5.7 µm, noise = 20 mK + accessories (LAN cable, Digital in/out cable, space ring, power supply, case) |
| Tripod | Manfrotto | 161MK2B | |
| IR camera mount | Manfrotto | 405 | |
| Projector development kit (PDK) for digital light processing (DLP) technology (DLP Light Commander 5500) | Logic PD | DLP-LC-DLP5500-10R | DLP5500 Digital Micromirror Device from Texas Instruments included , light engine and case need to be disassembed |
| PDK control software | Logic PD | Included when delivered, DLP Light Commander control software | |
| Mechanical platform for the PDK | BAM | Self made (140 x 230 x 420) mm3 | |
| Power meter control unit | Ophir | Vega | USB Interface |
| 30 W power meter head | Ophir | 30(150)A-LP1-18 | Power meter head to determine Transmission of the projector system |
| 500 W power meter head | Ophir | FL500A | Power meter for process supervision |
| Motion controller | Newport | ESP301 | with USB Interface |
| Translation stage | Newport | M-ILS200CC | Connected to ESP301 |
| Photodiode with amplifier | Thorlabs | PDA 36A-EC | 1" mount |
| Reflective filter ND1 | Thorlabs | ND10A | to be mounted to the PDA 36A |
| Pinhole 1" | Thorlabs | P1000S | to be mounted to the PDA 36A |
| Optical aluminium breadboard | Thorlabs | MB60120/M | (1,200 mm x 900 mm) base |
| Plano Convex Lens f = 200 mm | Thorlabs | LA1979-B | Coated for IR, first telescope lens |
| Plano Convex Lens f = 75 mm | Thorlabs | LA1145-B | Coated for IR, second telescope lens |
| xy-translation stage | Newport | M401 | Used for adjusting the telecope |
| Beamsampler | Thorlabs | BSF20-B | Splits the optical output, used to reduce the optical input for the projector system |
| Mirror | Thorlabs | BB2-E03 | Mirror for coupling the beam to the DLP Light Commander |
| Heavy duty lab jack | Thorlabs | L490 | Used for the fiber mount and on top of the linear stage to position the sample (2x) |
| PDK-objective | Nikon | Nikon AF Nikkor 50 mm 1:1:8:D | Objective for DLP Light Commander, 50 mm |
| Plano Convex Lens f = 100 mm | Thorlabs | LA1050 -B | Lens is attached to the Nikon Objective |
| Bi-Convex Lens f = 60 mm | Thorlabs | LB1723 -B | Lens to be attached to the Nikon objective in order to determine the optical transmission with the 30 W measurement head |
| Square protected gold mirror | Thorlabs | PFSQ20-03-M01 | |
| High power IR sensor card | Newport | F-IRC-HP-M | Sensor card to check the optical pathway |
| 2" crosshairs | BAM | Self-made | |
| 1" crosshairs | BAM | Self-made | |
| Bullseye level | Thorlabs | LCL01 | |
| Translation Stage | Newport | M-UMR8.25 | Used for measuring the beam profile |
| Micrometer screw | Newport | DM17-25 | Used with translation stage M-UMR8.25 |
| Mounted Zero Aperture Iris | Thorlabs | ID75Z/M | used to check the optical pathway |
| Bases and Post Holders Essentials Kit, Metric and Universal Components | Thorlabs | ESK01/M | Basis |
| Posts & Accessories Essentials Kit, Metric and Universal Components | Thorlabs | ESK03/M | |
| M6 Cap Screw and Hardware Kit | Thorlabs | HW-KIT2/M | |
| Construction Rails | Thorlabs | XE25L700/M | |
| 1" Construction Cube | Thorlabs | RM1G | Used to mount construction rails |
| Electrical discharge machining | Sodick | AG60L | www.sodick.de |
| St37 block of steel (100 x 100 x 40) mm3 |
BAM | self-made, hidden defect with remaining wall thicknesses of 0.25 mm, 0.5 mm, 0.70 mm, 1.25 mm (shown in Figure 5) | |
| St37 block of steel (100 x 100 x 40) mm |
BAM | self-made, hidden defect with remaining wall thicknesses of 1 mm, 1.5 mm, 1.75 mm, 2 mm (shown in Figure 5) | |
| Graphite spray | CRC Industries Europe NV | GRAPHIT 33 | Ref. 20760, 200 mL aerosol (Kontakt-Chemie) |
| Protective tape | Tesa | tesakrepp 4348 | used to protect the hidden defects while coating |
References
- Thiel, E., Kreutzbruck, M., Ziegler, M. Laser-projected photothermal thermography using thermal wave field interference for subsurface defect characterization. Appl. Phys. Lett. 109 (12), 123504 (2016).
- Ibarra-Castanedo, C., Tarpani, J. R., Maldague, X. P. V. Nondestructive testing with thermography. Eur. J. Phys. 34 (6), 91-109 (2013).
- Maldague, X. P. Introduction to NDT by active infrared thermography. Mater. Eval. 60 (9), 1060-1073 (2002).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning pulsed laser spot thermography. Ndt&E Int. 44 (2), 216-225 (2011).
- Lugin, S. Detection of hidden defects by lateral thermal flows. Ndt&E Int. 56, 48-55 (2013).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning laser-line thermography and laser-spot thermography. Meas. Sci. Technol. 22 (3), (2011).
- Pech-May, N. W., Oleaga, A., Mendioroz, A., Salazar, A. Fast Characterization of the Width of Vertical Cracks Using Pulsed Laser Spot Infrared Thermography. Journal of Nondestructive Evaluation. 35 (2), 22 (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. SPIE 9761. Douglass, M. R., King, P. S., Lee, B. L. , Spie-Int Soc Optical Engineering. (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. WCNDT 2016. , 6 (2016).
- Mandelis, A. Diffusion-Wave Fields: mathematical methods and Green functions. , Springer-Verlag. (2001).
- Almond, D., Patel, P. Photothermal Science and Techniques. 10, Chapman & Hall. (1996).
- Salazar, A. Energy propagation of thermal waves. Eur. J. Phys. 27 (6), 1349-1355 (2006).
- Bennett, C. A., Patty, R. R. Thermal wave interferometry: a potential application of the photoacoustic effect. Appl. Opt. 21 (1), 49-54 (1982).
- Busse, G. Stereoscopic depth analysis by thermal wave transmission for nondestructive evaluation. Appl. Phys. Lett. 42 (4), 366 (1983).
- Holtmann, N., Artzt, K., Gleiter, A., Strunk, H. P., Busse, G. Iterative improvement of Lockin-thermography results by temporal and spatial adaption of optical excitation. Qirt J. 9 (2), 167-176 (2012).
- Pribe, J. D., Thandu, S. C., Yin, Z., Kinzel, E. C. Toward DMD illuminated spatial-temporal modulated thermography. Proc. SPIE 9861. , (2016).
- Ravichandran, A. Spatial and temporal modulation of heat source using light modulator for advanced thermography. , Missouri University of Science and Technology. (2015).
- DLP 0.55 XGA Series 450 DMD. , TexasInstruments. (2015).
- Application Note - DLP System Optics. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?baseLiteratureNumber=dlpa022&keyMatch=dlpa022&tisearch=Search-EN-Everything (2010).
- DLP LightCommander Control Software - User Manual. , LogicPD. Available from: https://support.logicpd.com/ProductDownloads/LegacyProducts/DLPLightCommander.aspx?_sw_csrfToken=318b0448 (2011).
- White Paper - Laser Power Handling for DMDs. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?literatureNumber=dlpa027&fileType=pdf (2012).
- Moench, H., et al. High-power VCSEL systems and applications. Proc. SPIE 9348. , (2015).
