

Summary
Deze methode streeft naar het lokaliseren van verticale ondergrondse defecten. Hier koppelen we een laser aan met een ruimtelijke lichtmodulator en trekken de video-ingang om deterministisch een monsteroppervlak te verwarmen met twee antifase gemoduleerde lijnen, met het verwerven van sterk opgeloste thermische beelden. De defectpositie wordt opgehaald om de thermische golfinterferentie minima te evalueren.
Abstract
De gepresenteerde methode wordt gebruikt om ondergrondse defecten die loodrecht op het oppervlak zijn gericht te lokaliseren. Om dit te bereiken creëren we destructieve thermische golfvelden die door het defect worden verstoord. Dit effect wordt gemeten en gebruikt om het defect te lokaliseren. We vormen de destructief interfererende golfvelden door gebruik te maken van een gewijzigde projector. De originele lichtmotor van de projector wordt vervangen door een vezelkoppelde high-power diode laser. De straal is gevormd en afgestemd op de ruimtelijke lichtmodulator van de projector en is geoptimaliseerd voor optimale optische doorvoer en homogene projectie door het balkprofiel eerst te karakteriseren en, tweede, het mechanisch en numeriek te corrigeren. Een high-performance infrarood (IR) camera is ingesteld op basis van de strakke geometrische situatie (inclusief correcties van de geometrische beeldvervormingen) en de vereiste om zwakke temperatuuroscillaties op het monsteroppervlak te detecteren. Gegevensverzameling kan één keer per synchronisatie worden uitgevoerdRonisatie tussen de individuele thermische golfveldbronnen, het scannen stadium en de IR-camera wordt opgesteld door gebruik te maken van een speciale experimentele setup die moet worden afgestemd op het specifieke materiaal dat wordt onderzocht. Tijdens de data na verwerking wordt de relevante informatie over de aanwezigheid van een defect onder het oppervlak van het monster geëxtraheerd. Het wordt opgehaald uit het oscillerende deel van de verworven thermische straling die afkomstig is van de zogenaamde uitputting lijn van het monsteroppervlak. De exacte locatie van het defect is afgeleid van de analyse van de ruimtelijke-temporale vorm van deze oscillaties in een laatste stap. De methode is referentievrij en zeer gevoelig voor veranderingen binnen het thermische golfveld. Tot nu toe is de methode getest met staalmonsters, maar ook van toepassing op verschillende materialen, met name aan temperatuurgevoelige materialen.
Introduction
De laserprojecteerde fototermische thermografie (LPPT) methode wordt gebruikt om ondergrondse defecten te lokaliseren die in het volume van het testmonster zijn ingebed en overwegend loodrecht op het oppervlak zijn georiënteerd.
De werkwijze gebruikt de destructieve interferentie van twee anti-gefaseerde thermische golfvelden met dezelfde verlenging en frequentie zoals getoond in Figuur 1b . Bij isotrope defectvrije materialen neutraliseren de thermische golven destructief ( dwz nul temperatuur oscillatie) op het symmetrische vlak door coherente superpositie. Bij een materiaal met een ondergrondse afwijking maakt de methode gebruik van de interactie van de laterale componenten ( dwz in het vliegtuig) tussen de transiënte warmtestroom en dit defect. Deze interactie kan worden gemeten in een herschikte oscillerende temperatuurverlenging bij de symmetrie lijn op het monsteroppervlak. Nu wordt het defect bevattende monster gescand door het overgelegde thermische golfveld enHet niveau van de temperatuurverlenging wordt gemeten in relatie tot de steekproefpositie. Vanwege de symmetrie wordt de destructieve interferentie voorwaarde nog eens voldaan wanneer het defect het symmetrievlak overschrijdt; Dit stelt ons in staat het defect zeer gevoelig te lokaliseren. Aangezien het niveau van maximale storing van de destructieve storing correleert met de diepte van het defect, is het mogelijk om de diepte ervan te bepalen door de temperatuurscanning 1 te analyseren.
De LPPT kan worden toegewezen aan de actieve thermografie-methode, een gevestigde niet-destructieve methode, waarbij transiente verwarming actief wordt gegenereerd en de resulterende, ook voorbijgaande, temperatuurverdeling wordt gemeten via een thermische IR-camera. In het algemeen is de gevoeligheid van deze methodiek beperkt tot defecten die in hoofdzaak loodrecht op de transiënte warmtestroom zijn georiënteerd. Bovendien, aangezien de regulerende transiente warmtegeleidingvergelijking een parabolische partiële differe isNtial equation, de warmtestroom in het volume is sterk gedempt. Als gevolg hiervan is de proefdiepte van de actieve thermografie-methode beperkt tot een nabijgelegen gebied, meestal in het millimeterbereik. Twee van de meest gangbare actieve thermografie technieken zijn gepulseerd en lock-in thermografie. Ze zijn snel te wijten aan platte optische oppervlakverlichting 2 , maar leiden tot een transiënte warmtestroom loodrecht op het oppervlak. Daarom is de gevoeligheid van deze technieken beperkt tot defecten die overwegend parallel gericht zijn ( bijv. Delaminaties of vochtigheid) aan het verwarmde monsteroppervlak. Een empirische regel voor gepulseerde thermografie stelt dat "de straal van het kleinste detecteerbare defect minimaal een tot twee keer groter is dan de diepte onder het oppervlak" 3 . Om het effectieve interactiegebied te verhogen tussen een loodrecht georiënteerd defect ( bijv. Een kraak) en de warmtestroom, moet de richting van de warmtestroom zijnveranderd. Lokale excitatie, bijvoorbeeld door een gefocusseerde laser met een lineaire of cirkelvormige plek te gebruiken, genereert een warmtestroom met een in-vliegtuigcomponent die effectief kan interageren met het loodrecht defect 4 , 5 , 6 , 7 .
In de gepresenteerde methode gebruiken we ook de zijdelingse warmtestroomcomponenten om ondergrondseffecten te detecteren, maar we gebruiken het feit dat thermische golven overbelast kunnen worden, terwijl defecten, vooral verticaal georiënteerde, deze superpositie verstoren. Op deze manier lijkt de gepresenteerde werkwijze op een referentievrije, symmetrische en zeer gevoelige methode, omdat het mogelijk is om kunstmatige ondergrondseffecten op een breedte / diepteverhouding van ver onder de 8 , 9 te detecteren. Tot nu toe was het moeilijk om twee anti-gefaseerde thermische golfvelden te creëren die voldoende energie leveren. We hebben deze b bereiktY een ruimtelijke lichtmodulator (SLM) koppelen aan een high-power diode laser, waardoor we de hoge optische kracht van het lasersysteem kunnen combineren met de ruimtelijke en temporale resolutie van de SLM (zie figuur 2 ) in een high-power projector . De thermische golfvelden worden nu gecreëerd door fotothermische omzetting van twee anti-gefaseerde sinusvormige modulerende lijnpatronen via de pixelhelderheid van het geprojecteerde beeld (zie figuur 2 , figuur 1a ). Dit leidt tot gestructureerde verhitting van het monsteroppervlak en resulteert in goed gedefinieerde destructieve interfererende thermische golfvelden. Om een ondergrond defect te vinden, wordt de storing van de destructieve inferentie gemeten als een temperatuuroscillatie op het oppervlak met behulp van een IR-camera.
De term thermische golf wordt omstrede besproken omdat thermische golven geen energie vervoeren door het diffusieve karakter van de warmtevermeerdering. Toch is er golfachtig gedrag als hij Ting periodiek, waardoor we overeenkomsten kunnen maken tussen echte golven en diffusieprocessen 10 , 11 , 12 . Zo kan een thermische golf worden begrepen als zeer gedempt in de voortplantingsrichting, maar periodiek over de tijd ( Figuur 1b ). De karakteristieke thermische diffusie lengte  Wordt hierbij beschreven door zijn materiële eigenschappen (thermische geleidbaarheid k , warmtecapaciteit cp en dichtheid ρ ) en de excitatiefrequentie ƒ. Hoewel de thermische golf sterk afvalt, kan de golf natuur aangewend worden om inzicht te krijgen in de eigenschappen van het monster. De eerste toepassing van thermische golfinterferentie werd gebruikt om de dikte van lagen te bepalen. In tegenstelling tot onze methode werd het interferentie effect gebruikt in de diepteafmeting ( dwz loodrecht op het oppervlak) Ref "> 13. Het uitbreiden van het idee van interferentie met een tweede dimensie door het splitsen van een laserstraal, thermische golfinterferentie werd gebruikt om ondergrondse defecten 14 te grootte. Deze methode werd nog steeds in de transmissieconfiguratie toegepast, wat betekent dat het door de penetratie werd beperkt Diepte van de thermische golf. Bovendien, omdat er slechts één laserbron is gebruikt, is deze methode van toepassing op constructieve interferentie, wat betekent dat een defectvrije referentie nodig is. Behalve het idee van thermische golfinterferentie, is de eerste technische aanpak van ruimtelijk en Tijdelijk gecontroleerde verwarming werd uitgevoerd door Holtmann et al. Door gebruik te maken van een niet-gemodificeerde LCD-projector met vloeibare kristal (LCD) met de ingebouwde lichtbron, die erg beperkt was in zijn optische uitgangsvermogen 15. Verdere aanpak van Pribe en Ravichandran gericht op het vergroten van de optische Output vermogen door ook een laser aan een SLM 16 te koppelen , S = "xref"> 17.
Wordt hierbij beschreven door zijn materiële eigenschappen (thermische geleidbaarheid k , warmtecapaciteit cp en dichtheid ρ ) en de excitatiefrequentie ƒ. Hoewel de thermische golf sterk afvalt, kan de golf natuur aangewend worden om inzicht te krijgen in de eigenschappen van het monster. De eerste toepassing van thermische golfinterferentie werd gebruikt om de dikte van lagen te bepalen. In tegenstelling tot onze methode werd het interferentie effect gebruikt in de diepteafmeting ( dwz loodrecht op het oppervlak) Ref "> 13. Het uitbreiden van het idee van interferentie met een tweede dimensie door het splitsen van een laserstraal, thermische golfinterferentie werd gebruikt om ondergrondse defecten 14 te grootte. Deze methode werd nog steeds in de transmissieconfiguratie toegepast, wat betekent dat het door de penetratie werd beperkt Diepte van de thermische golf. Bovendien, omdat er slechts één laserbron is gebruikt, is deze methode van toepassing op constructieve interferentie, wat betekent dat een defectvrije referentie nodig is. Behalve het idee van thermische golfinterferentie, is de eerste technische aanpak van ruimtelijk en Tijdelijk gecontroleerde verwarming werd uitgevoerd door Holtmann et al. Door gebruik te maken van een niet-gemodificeerde LCD-projector met vloeibare kristal (LCD) met de ingebouwde lichtbron, die erg beperkt was in zijn optische uitgangsvermogen 15. Verdere aanpak van Pribe en Ravichandran gericht op het vergroten van de optische Output vermogen door ook een laser aan een SLM 16 te koppelen , S = "xref"> 17.
Het hier beschreven protocol beschrijft hoe u de LPPT-methode toepast om ondergrondseffecten te lokaliseren die loodrecht op het oppervlak van staalmonsters zijn gericht. De methode is in een vroeg stadium maar toch krachtig genoeg om de voorgestelde aanpak te valideren; Het is echter nog beperkt in termen van de haalbare optische uitgangsvermogen van de experimentele opstelling. Aangezien de toename van de optische uitgangsvermogen een uitdaging blijft, wordt de gepresenteerde werkwijze toegepast op gecoat staal dat kunstmatige elektrisch ontladingsbewerking bevat. Niettemin houden de belangrijkste en meest kritische stappen van het protocol, die een homogene gestructureerde verlichting genereren, de vereisten voor destructieve thermische golfinterferentie en het lokaliseren van het defect, nog steeds vast voor meer veeleisende gebreken. Aangezien de regulerende hoeveelheid de thermische diffusielengte μ is, kan de LPPT-methode ook op tal van verschillende materialen worden toegepast.
nt ">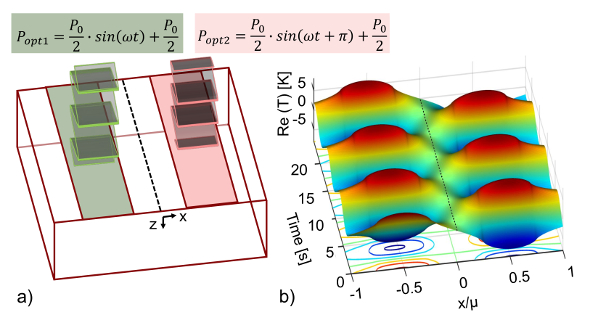
Figuur 1: Principe van destructief interferentie effect. (A) Schematisch van het verlichtingspatroon dat tijdens experimenten werd gebruikt. Het monster wordt ruimtelijk en tijdelijk verhit door twee periodiek verlichte patronen met een faseverschuiving van π. De streeplijn vertegenwoordigt de symmetrie lijn tussen beide patronen. Deze lijn wordt gebruikt voor evaluatie als een "uitputting lijn". ( B ) Diagram van het ruimtelijk en tijdelijk opgelost afwisselend thermisch resultaat zoals berekend uit de analytische oplossing van de warmte-geleidingsvergelijking. Het geeft de reactie thermische golven aan de verlichting van (a) met een bestraling van de twee patronen met P opt 1 = 1,5 W sin (2π 0.125 Hz t ) + 1,5 W en P opt 2 = 1,5 W sin (2π 0.125 Hz t + Π) + 1,5 W voor bouwstaal ρ cp = 461 J / (kg · K), k = 54 W / (m · K). Het temperatuurprofiel bij de stippellijn laat geen thermische oscillatie zien voor homogeen, isotropisch materiaal. Klik hier om een grotere versie van deze figuur te bekijken.

Figuur 2: Schematisch van het meetprincipe van gestructureerde verwarming gebruikt in actieve thermografie. Een Gaussische straal, gehomogeniseerd naar een tophoedprofiel, wordt toegepast op een ruimtelijke lichtmodulator (SLM). De SLM verwerpt de straal ruimtelijk door zijn omschakelbare elementen en tijdelijk door de schakelnelheid. Elk element vertegenwoordigt een SLM-pixel. In dit experiment is de SLM een digitaal microspiegelapparaat (DMD). Door de pixel helderheid A te moduleren met een tijd deterministische controle software, het monster oppervlakWordt op een gestructureerde manier verwarmd. Bij het gepresenteerde experiment moduleren we twee anti-gefaseerde lijnen (fasen: φ = 0, π), die de oorsprong hebben van coherente interfererende thermische golfvelden bij de hoekfrequentie ω. De golfvelden interageren met de binnenste structuur van het monster en beïnvloeden ook het temperatuurveld op het oppervlak. Dit wordt gemeten via zijn thermische straling door middel van een infrarood camera in het midden van de golf. Klik hier om een grotere versie van deze figuur te bekijken.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
OPMERKING: Let op: Let op de veiligheid van de laser omdat de installatie een klasse 4 laser gebruikt. Draag de juiste beschermende bril en kleding. Hanteer ook de pilootlaser met zorg.
1. Koppel de Diode Laser aan de Projector Development Kit (PDK)
- Bereid het broodbord voor.
- Monteer alle apparaten op het broodbord, zoals weergegeven in figuur 3 . Plaats het broodbord met alle voorverpakte apparaten in een laserlaboratorium.
- Plaats de laservezelmontage op het broodbord.
- Bevestig de vezel aan de laservezelbevestiging ( zie figuur 3 ).
- Schakel de sluiter en de laserdrempel van de diode laser in. Controleer de uitgangsdiameter (40 mm) van de straal door gebruik te maken van de high-power IR-sensorkaart. Schakel de laserdrempel uit en de pilootlaser aan. Pas de hoogte van de optische as aan op de laservezelmontage aan de ingang van de PDK door gebruik te maken vanDe lab jack ( zie figuur 4a, 4d ).
- Verplaats de laservezelmontage langs de rail. Let op de positie van de pilootlaser op afstand. Het middelpunt moet niet bewegen. Controleer in dat geval de montage tussen de lab jack en de laservezel mount. Bevestig daarna de laservezelberging.
OPMERKING: De rail is de referentie voor de optische as en moet parallel op het broodbord worden uitgelijnd. De telescooplenzen moeten vooraf worden verwijderd.
- Stel de telescoop aan.
- Gebruik de telescoop om de straaldiameter van 40 mm tot 15 mm te verminderen om in de ingang van de PDK te passen ( zie figuur 4a, 4d ). Gebruik een 200 mm en een 75 mm platte convexe lens als respectievelijk eerste en tweede lens. Gebruik de pilootlaser en de kruispunten om de eerste lens te plaatsen ( zie figuur 4b ).
- Maak de afstand tussen beide lenzen grof aan de hand van de stalen regelaar. Gebruik de kruispunten opnieuwOm de lens op de pilootlaser te plaatsen. Monteer de tweede lens op een xy-vertaalfase. Gebruik het podium om de balk te collimeren.
- Zet de straal sampler uit.
- Raak (met de laserstraal) de straalsamensteller in een hoek van 45 °. Gebruik een tweede rail loodrecht op de eerste om de balkmonster te plaatsen.
OPMERKING: De meeste optische voeding wordt afgekoeld door de 500 W vermogensmeter. De optische uitgang van de diode laser is stabieler op volle kracht, daarom wordt de optische stroom opgesplitst. - Gebruik de iris in een hoogstaande post om het optische pad langs de rail te controleren ( zie figuur 4a ) met de pilootlaser.
- Raak (met de laserstraal) de straalsamensteller in een hoek van 45 °. Gebruik een tweede rail loodrecht op de eerste om de balkmonster te plaatsen.
- Zet de spiegel uit.
- Voordat u de spiegel aanpast , zoals getoond in figuur 4c , verwijder dan de PDK en zijn basisplaat. Fixeer een derde spoor loodrecht op de tweede. Nogmaals, controleer het optische pad door de iris.
OPMERKING: Het optische pad sMoet worden afgestemd op de spoorrichting. De bundel moet gecollimiseerd worden.
- Voordat u de spiegel aanpast , zoals getoond in figuur 4c , verwijder dan de PDK en zijn basisplaat. Fixeer een derde spoor loodrecht op de tweede. Nogmaals, controleer het optische pad door de iris.
- Demonteer en plaats de PDK.
- Voordat u de PDK 18 positioneert, verwijder u de originele lichtmotor.
OPMERKING: er waren twee voormalige lenzen die oorspronkelijk de LED's van de PDK 19 collimeren ( zie figuur 4d , ingang). Ze worden gelijmd en moeten verwijderd worden door gebruik te maken van aceton. - Zet het platform van de PDK in evenwicht met de derde rail en dus op de optische as van de balk. Gebruik de kruispunten die zijn aangepast aan de ingang van PDK om de PDK te positioneren ten opzichte van de balk. Blijf parallel evenwijdig. Schakel de pilootlaser uit, omdat het te zwak is om de PDK door te geven.
- Voordat u de PDK 18 positioneert, verwijder u de originele lichtmotor.
- Projecteer een wit beeld om de optische kracht te controleren.
- Zorg ervoor dat de HDMI-kabel en de USB-kabel van de PDK alsmede de DAQ-kaart (Data Acquisition Card) aangesloten zijn op deControle pc. Sluit de poorten aan op de laserbeheerkast voor "laserluiter", "laserdrempel" en "laser aan" op de DAQ-kaart. Sluit de "laser control voltage" poort van de scanner aan op de DAQ-kaart.
- Start de PDK-controlesoftware 20 en configureer deze als een gewone projector volgens de stappen i.1 tot en met i.3 van figuur 5b . Schakel het tweede scherm in en controleer of er geen venster is in het tweede scherm. Gebruik een witte desktop achtergrond en controleer de functie van de projector met de LED-flitser als invoerlichtbron.
OPMERKING: als een wit beeld wordt geprojecteerd naar het beeldvlak van de PDK, werkt het apparaat goed.
- Controleer de optische ingangsspanning.
- Zet de 30 W vermogensmeterhoofd die op de stroommeterregelaar in de optische weg voor de PDK is bevestigd ( zie figuur 4e - positie 1). Schakel de diode laser inAan met de LPPT-laserbesturingssoftware, volg de stappen i.1 tot en met i.3 van figuur 5a ) op een laag stroomniveau van stap i.1 = 0,5 V.
OPMERKING: De LPPT-laserbesturingssoftware schakelt de DAQ-kaart in die de laserbesturingsuitgangen schakelt ( zie 1.7.1). Overweeg de veiligheid van de laser, draag glazen en beschermende kleding! - Controleer de positie van de meter van de metersmeter met de IR-sensorkaart met hoge vermogen. Houd de IR-kaart in de balk en kijk het gloeien. Pas de diameter van de straal aan op de sensor van de metersensor ( Figuur 3 ).
- Controleer de maximale optische ingangskracht bij de ingang van de PDK (volg weer figuur 5a ), stap i.1) met een waarde van 10 V.
OPMERKING: De optische ingangskracht bij de ingang van de PDK dient maximaal 22 W 21 te zijn . Bij deze configuratie werden de meettijden tot 5 minuten geduld zonder het SLM te vernietigen, wat het geval is als de PDK gerealiseerd werd als een digitale micromirror-apparaat (DMD). - Controleer de optische uitgangsvermogen.
- Plaats de 30 W vermogensmeterkop in ongeveer 60 mm van de PDK met behulp van af = 60 mm lens die aan de PDK-doelstelling is bevestigd ( zie figuur 4e ).
- Plaats de LED-flitser aan de ingang van de projector ( zie afbeelding 4d ) en schakel het aan. Scherp de positie van de meter van de machtmeter zodanig dat het licht van het geprojecteerde beeld verzamelt zoals getoond in figuur 4e . Verwijder daarna het LED-flitslicht.
- Start de LPPT-laserbesturingssoftware. Vul '0.5 V' in het veld 'voltage' en klik op 'Laser On!' knop. Lees de optische voeding van de bedieningseenheid van de vermogensmeter. Stop de laser door op de "Stop" knop te klikken. Herhaal deze stappen voor 2 V, 6 V, 10 V ( zie Figuur 5a , i.1 tot en met I.3).
OPMERKING: Als een spanning van 10 V een optische uitgangsvermogen van &# 62; 4 W, de eerste test is succesvol. Anders moet de optische uitlijning worden gecontroleerd. Probeer de optische uitgangsvermogen te maximaliseren door de spiegel fijn in te stellen.
- Meet het balkprofiel.
- Gebruik een fotodiode met versterker en pinhole om het straalprofiel van het resulterende geprojecteerde beeld te meten ( zie figuur 4f ). Als een balkprofiel toegankelijk is, gebruik dit apparaat maar verzwak de balk.
- Bevestig de fotodiode aan een vertaalfase die zelf op een beugel is gemonteerd. Bevestig ook een neutraal-dichtheid (ND) 1 reflecterend filter en het 1 mm pinhole aan de diode. Plaats de fotodiode bovenop een gemotoriseerde vertaalfase en de lab jack. Om de hoogte te bereiken, gebruik twee broodplanken (100 mm x 100 mm).
- Gebruik af = 100 mm lens na de PDK-doelstelling ( zie Figuur 4e ) en projecteer een witbeeld met behulp van het LED-flitslicht ( zie stap 1.7). Verplaats de fotodiode naar het beeldvlak enZorg ervoor dat het bereik van de fotodiode die in de vertaalfase wordt verplaatst, binnen het geprojecteerde beeld ligt ( zie figuur 4f ).
- Sluit de fotodiode aan op de voeding en de DAQ-kaart. Gebruik 40 dB versterking voor 6 V stuurspanning voor optische laservermogen. Sluit de bewegingsregelaar voor de gemotoriseerde vertaalfase aan op de bedieningspaneel.
OPMERKING: De LPPT-intensiteitsprogramma regelt de beweging van de pinholed fotodiode door het verlichte gebied bij een constante snelheid van v = 0,1 mm / s en registreert het fotodiodesignaal bij 100 kHz. De laser wordt ook gecontroleerd via software. - Gebruik de micrometerschroef van het podium in stappen van 1 mm zoals getoond in figuur 4f om de afbeelding te scannen. Zie resultaten getoond in Figuur 6a-6b .
- Bereken het correctiebeeld.
- Om de inhomogeniteit van het straalprofiel te corrigeren, bereken een omgekeerde pixelmatrix met betrekking tot de straalprofiel. Identificeer het bereik van het geprojecteerde beeld met behulp van een randdetectie algoritme.
- Transformeer tijdsinformatie in ruimtelijke informatie met behulp van de trapsnelheid. Transformeer de ruimtelijke informatie naar het pixel domein van de PDK met x = 1.024 pixels en y = 768 pixels. Normaliseer het diode signaal op de maximale waarde.
OPMERKING: Het referentieniveau voor de correctie is gekozen met het gemiddelde van alle genormaliseerde beeldenwaarden. Het verzwakingsniveau wordt berekend met:
P Pixel is de genormaliseerde diode-intensiteit per pixel. Waarden van Pixel LC boven 1 zijn ingesteld op 1. - Vermenigvuldig de correctiematrix ( zie figuur 6c ) met een wit beeld en meet het profiel opnieuw om te controleren of de correctie voldoende was ( zie Figuur 6e-6h ).
2. Bereid de steekproef op
- Zet de 30 W vermogensmeterhoofd die op de stroommeterregelaar in de optische weg voor de PDK is bevestigd ( zie figuur 4e - positie 1). Schakel de diode laser inAan met de LPPT-laserbesturingssoftware, volg de stappen i.1 tot en met i.3 van figuur 5a ) op een laag stroomniveau van stap i.1 = 0,5 V.
- Gebruik twee blokken van 100 mm x 100 mm x 40 mm bouwstaal St37 als het monstermateriaal met een dichtheid van ρ = 7.850 kg m -3 , warmtegeleidingsvermogen k = 54 W · m -1 · K -1 en warmtecapaciteit Van c p = 461 J · kg -1 · K -1 .
- Kunstmatige gebreken in twee blokken inbrengen op 0,25 mm, 0,5 mm, 0,7 mm, 1,25 mm en 1 mm, 1,5 mm, 1,75 mm, 2 mm door elektrische ontladingsbewerking onder het oppervlak, zoals getoond in figuur 7 .
- Trek de defecten aan met een beschermband. Sandblast het bovenoppervlak om homogene absorptie te hebben. Trek de gebreken aan met een beschermende tape voordat u het bedekt. Ontvetten het oppervlak met behulp van aceton.
- Bedek het verlichte gebied met een grafietspray vanaf 30 mm afstand twee keer (0 ° en 90 °). De coating is succesvol als er een homogeen oppervlak is. Als de coating niet intact is, start dan opnieuw ontvetten en reinigen en herhaalDe bekledingsstap. Droog de oppervlakte ~ 2 uur. Raak het oppervlak niet aan, het zal de emissiviteit veranderen.
- Verwijder de tape en zorg ervoor dat de grafiet het ondergrondse defect niet binnentreedt.

3. Bereid het experiment voor
- Bereid PDK en diode laser voor.
- Project een wit beeld zoals beschreven in stap 1.7). Controleer de optische ingangsspanning van de PDK zoals beschreven in stap 1.8). Controleer de optische uitgangsvermogen van de PDK zoals aangegeven in stap 1.9).
- Sluit de 500 W vermogensmeterhoofd aan op de bedieningseenheid van de vermogensmeter en sluit de voedingsmeter aan op de besturingscomputer (PC) via een USB-kabel.
- Bereid de bewegingsregelaar op en plaats het monster.
- Sluit de bewegingsregelaar aan op de vertaalfase en op de besturingscomputer via een USB-kabel. Plaats de vertaalfase orthogonaal op de optische as op een afstand van ongeveer 80 mm ten opzichte van PDK.
OPMERKING: De LPPT softwareE, die op de besturingscomputer draait, regelt de bewegingsregelaar. - Bevestig de f = 100 mm lens aan de PDK doelstelling. Gebruik het LED-flitslicht als invoerlichtbron ( zie figuur 4d , de kruispunten markeren de ingang) naar de PDK om het beeldvlak van de projector te vinden.
- Plaats een wit vel papier op een benaderde afstand van 100 mm voor het objectief en beweeg het heen en weer om het vlak van de scherpe verlichte rechthoek te vinden, dat is het beeldvlak.
- Plaats het gecoate monsteroppervlak in dit vlak. Stel de hoogte van het monster in met behulp van de lab jack die is gemonteerd op de lineaire vertaalfase. Kies de hoogte zodanig dat de bovenkant van de verlichte rechthoek de bovenkant van het monster treft ( zie figuur 4g ). Plaats het defect dat het binnen het bereik van het verlichte gebied ligt.
- Zero de bewegingsregelaar door het apparaat uit en weer aan te zetten.
- Sluit de bewegingsregelaar aan op de vertaalfase en op de besturingscomputer via een USB-kabel. Plaats de vertaalfase orthogonaal op de optische as op een afstand van ongeveer 80 mm ten opzichte van PDK.
- Bereid de camera voor en plaats de gouden spiegel.
- Gebruik de LED-flitser als invoerlichtbron voor de projector om een witte afbeelding aan het monster te projecteren.
- Plaats de gouden spiegel op een hoogte zodanig dat het de bovenste rand van het monster ziet ( Figuur 4g ). Stel de spiegel in een hoek van ongeveer 35 ° zoals in figuur 3 wordt getoond. Plaats de gouden spiegel zo dicht mogelijk bij de PDK-doelstelling, maar niet schaduw de projectie.
OPMERKING: De spiegel is bevestigd aan een post in een gemonteerde posthouder. De hoogte en positie worden vastgezet door klemmen. - Monteer de IR camera op het statief. Niveau de IR camera met het bullseye niveau. Pas de IR camera aan op de hoogte van de PDK-doelstelling. Zet het zodanig dat het het geprojecteerde witte beeld over de gouden spiegel ziet.
OPMERKING: De geschatte afstand langs de optische weg is ongeveer 1 m. - Gebruik de afstandsring tussen de IR-camera en de IR-camera. MakenZorg ervoor dat de trigger ingang van de camera is aangesloten op de meting data acquisitie kaart om het frame te grijpen. Sluit ook de IR-camera-besturings PC aan op de IR-camera via de LAN-kabel.
- Zet de camera aan en wacht ten minste op de opwarmtijd ( ca. 30 min).
- Start de IR camera controle software. Verander de menubalkit naar "Camera". Klik op de knop "Verbinden" om de IR-camera aan te sluiten ( zie afbeelding 8a , stap i.1).
OPMERKING: de camera toont een livebeeld van de scène. - Klik op de knop 'Afstandsbediening' om het paneel 'Afstandsbediening' te openen ( zie afbeelding 8d , stap i.2). Kies de kalibratie "HF 100mm (-10 ° C - 60 ° C) 1140 μs". Zie figuur 8d , stap i.2.1.
OPMERKING: Het kalibratiebereik moet zo klein mogelijk zijn om geluid te verminderen. - Pas de lensfocusring handmatig aan om de IR-camera naar de camera te richtenE monstervlak.
OPMERKING: Het is belangrijk dat het beeldveld van de camera zo groot is als het maximaal geprojecteerde gebied om de maximale ruimtelijke resolutie te krijgen ( zie figuur 4g ). Men kan de positie, hoogte en oriëntatie van de IR-camera veranderen. Om te beslissen of een beeld scherp is, heeft men een temperatuurcontrast in het beeldvlak nodig. Een staalregelaar kan gebruikt worden om een contrast te genereren. Als het IR-beeld nog steeds laag contrast heeft, kan men het aanpassen met behulp van het selectieprogramma ( zie figuur 8c , i.3) - Voer een niet-uniformiteitscorrectie uit door op de knop "NUC" te klikken ( zie figuur 8d , stap i.2.2). Dek de IR camera doelstelling en klik op de knop "ok".
- Bepaal de relatie tussen IR-camera pixel domein en projector coördinaten.
- Bepaal de relatie tussen het PDK pixel domein, het IR camera pixel domein en de leNste schaal van het monster door een wit beeld of patroon aan het monsteroppervlak te projecteren ( zie figuur 4 g, h ). Meet het geprojecteerde gebied met behulp van een staalregelaar die de relatie tussen het PDK-domein en de lengteschaal van het monster geeft.
- Gebruik de f = 100 mm lens die aan de PDK-doelstelling is bevestigd om een verlicht gebied van 21,3 mm x 16 mm (4: 3) te krijgen.
OPMERKING: De lengteschaal in PDK-coördinaten is: 1 geprojecteerde pixel = 21,3 mm / 1,024 pixel - Zoek de relatie tussen PDK en IR camera. Herhaal stap 1.9.3) voor 10 V.
- Gebruik de IR camera software om het menubalk item te veranderen in "Meet". Kies het kruisgereedschap uit de werkbalk 'Maatgebieden' ( zie figuur 8c ), stap i.4). Markeer de hoeken van het resulterende thermische beeld door links te klikken op het weergegeven frame.
- Klik met de rechtermuisknop op het kruis om naar het eigendomsvenster te gaan. Wijzig naar "coördinaten" en record ze voorLater transformatie van de thermische afbeelding naar het PDK-coördinatensysteem.
4. Implementeer het Experiment
- Bereid het experiment voor.
- Schatting verlichtingsgebied ten opzichte van de lengte schaal van het monster.
- Gebruik de f = 100 mm lens om een verlicht gebied van 5,5 mm x 16 mm per patroon te verkrijgen. Kies een gebied van 5,5 mm x 16,5 mm tussen die niet verlicht is.
OPMERKING: De resulterende irradiantie bedraagt ongeveer 1,2 W / cm².
- Gebruik de f = 100 mm lens om een verlicht gebied van 5,5 mm x 16 mm per patroon te verkrijgen. Kies een gebied van 5,5 mm x 16,5 mm tussen die niet verlicht is.
- Schatting verlichtingsgebied in eenheden ten opzichte van het PDK pixel domein.
- Transformeer de verlichte patroonpositie naar het pixel domein van de PDK (1.024 pixels x 768 pixels) met behulp van de vergelijking in stap 3.4.2). Gebruik [(512, 1); (512, 768)] pixels in het PDK-domein als de uitputtingslijn, die symmetrisch is tussen beide patronen.
- Bereken het totale aantal frames, meettijd en frames pR periode. Veronderstelt een snelheid van v = 0,05 mm / s, een traject reistijd van x = 10 mm en een PDK frame rate ƒ r = 40 Hz, bereken de metingstijd t via t = x / v = 200 s. Bereken ook het aantal frames niet ƒ = ƒ r • t = 8.000. Met een excitatiefrequentie van ƒ = 0.125 Hz, bereken de frames per periode p met p = nee ƒ / t ƒ = 320 frames / periode.
Opmerking: deze waarden worden gebruikt om de geprojecteerde beelden te genereren. - Controleer de installatie en zorg ervoor dat het laser systeem, de IR camera en (optioneel) de temperatuurregelaar op de DAQ-kaart is aangesloten. Controleer of de 500 W vermogensmeter, PDK en lineair op de bedieningspaneel zijn aangesloten.
- Schatting verlichtingsgebied ten opzichte van de lengte schaal van het monster.
- Installeer de camera besturings computer.
- Configureer de IR-besturingssoftware om een frame te grijpen wanneer de IR-camera een trigger-ingang ontvangt. Voor dit, sHeks aan het paneel "Camera" en klik op de "Remote" knop ( zie Figuur 8a , stap i.2) om het afstandsbedieningspaneel te openen. Kies 'Proces IO' in het vervolgkeuzemenu ( Figuur 8d , stap i.2.3) en activeer 'Sync In' en 'Gate' en sluit het menu.
- Open het acquisitiemenu door op de rechterbenedenhoek van het tabblad "Acquisitie parameters" te klikken ( zie Figuur 8a , i.5). Kies "Ext / Sync" in het dropdown menu ( zie Figuur 8b , i.5.1). Noem de meting door de bestands- en mapnamen in het veld "Map" in te voeren (zie Figuur 8b , i.5.2).
- Voer het totale frame nummer dat is berekend vanaf stap 4.1.3 in het veld "count" ( zie i.5.3). Sluit het acquisitiemenu en klik op de "Record" knop om de IR camera data acquisition te starten ( zie Figuur 8 , i.6).
NOTITIE:De opname alleen zal plaatsvinden als er een trigger ingang van de DAQ kaart is.
- Voer het experiment uit.
- Start de LPPT-besturingssoftware. Activeer de bewegingsregelaar door op de knop "Activeren?" Te klikken. Knop ( figuur 9a , i.1). Stel de reisparameters "StartPosition" = "-5 mm", "EndPosition" = "5 mm" en "Velocity" = "0.05 mm / s" door de bijbehorende genoemde velden aan te passen zoals getoond in Figuur 9a , i.1. Klik op de knop "Startmeting" (zie figuur 9a , i.2).
OPMERKING: Als het onduidelijk is waar het defect zich bevindt, kies een grotere reistafstand bij hogere snelheid. Let op de toename van de temperatuur van de PDK en de hoeveelheid gegevens die u hebt gemaakt. Merk op dat een gebruikersinterface voor het genereren van de afbeeldingsbeelden verschijnt ( zie figuur 9b ). - Genereer de geprojecteerde framebeelden. <ol>
- Linker klik op het veld 'Select Area Color'. Kies een kleur voor het patroongebied in het kleurendialoog ( Figuur 9 , i.3). Kies het 'gerechthoek gereedschap' uit de tekenbalk in de linkerbovenhoek.
- Teken een rechthoek in het beeldgebied door links te klikken en vast te houden terwijl u zich uitstrekt over het beeldgebied. Gebruik de getransformeerde patrooncoördinaten van stap 4.1.2) om de rechthoekcoördinaten in de linker onderhoek te definiëren (i.4). Klik op de knop 'Definieer gebied' ( figuur 9b , i.5).
OPMERKING: De berekende pixelcoördinaten in het PDK-domein voor 5.5 mm patroonformaat zijn: Rechthoek 1 (x1 = 116, y1 = 1; x2 = 380, y2 = 768), Rechthoek 2 (x1 = 644, y1 = 1; x2 = 908, y2 = 768). Nadat u op de knop "Omschrijving gebied" hebt geklikt, verschijnt een dialoogvenster voor het instellen van de patrooneigenschappen.
- Start de LPPT-besturingssoftware. Activeer de bewegingsregelaar door op de knop "Activeren?" Te klikken. Knop ( figuur 9a , i.1). Stel de reisparameters "StartPosition" = "-5 mm", "EndPosition" = "5 mm" en "Velocity" = "0.05 mm / s" door de bijbehorende genoemde velden aan te passen zoals getoond in Figuur 9a , i.1. Klik op de knop "Startmeting" (zie figuur 9a , i.2).
- Stel de patroon eigenschappen vast ( Figuur 9c , i.6).
- Kies "sinusgolf" uit deDrop down menu door links te klikken op het veld "Signal Type". Definieer de oscillatieparameters door de velden "Phase Shift" in te stellen op "0 °", "Frequentie" tot "0.125 Hz" en "Amplitude" tot "127" (faseverschuiving van 0 voor het eerste patroon en een faseverschuiving van π voor de seconde).
- Stel de laserspanning op 10 V door "10" in het veld "Spanning" te plaatsen. Plak 320 in het veld "Pics / period" met behulp van de waarde van stap 4.1.3). Druk op de knop "Volgende"; Dit sluit het paneel.
OPMERKING: De LPPT-controlesoftware berekent een periodieke beeldstroom bij de resolutie van de PDK. Als een witte pixel betekent maximaal optisch vermogen en een nulvermogen van zwart pixel, worden twee oscillerende patronen berekend. De grijze waarde van het eerste patroon wordt berekend met P1 = 127 zonde (2π 0.125 Hz t ) + 127 en die van de tweede met P2 = 127 zonde (2π 0.125 Hz t+ Π) + 127 (zie figuur 2 , grafiek), terwijl de tijd t gediscretiseerd wordt naar de gekozen frame rate ( zie stap 4.3.4).
- Maak het tweede geprojecteerde patroon.
- Herhaal stappen 4.3.2) en 4.3.3) na de workflow van Figuur 9, maar met een andere kleur en een andere "Fase Shift" van "180 °". Klik op de knop "Calcul Frames" om de geprojecteerde patronen te berekenen. Stel de frame rate van de PDK en IR camera in op "40 Hz" in het dialoogvenster.
- Laad de correctie afbeelding.
- Volg de werkstroom van Figuur 9b ), stap i.12. Kies het paneel 'laadcorrectie' en geef het bestand voor het berekende beeld van stap 1.11). Laad het correctiebeeld door op de knop te klikken.
- Start de meting door op de knop "Start" te klikken ( zie figuur 9b , stap i.13).
OPMERKING: De berekende frames worden geprojecteerd op het monster terwijl het podium beweegt. De frames worden verworven en geteld door de IR-besturingssoftware. - Stop de meting wanneer alle frames worden verworven (voortgangsbalk = 100%) door op de knop "Stop Meten" te klikken ( zie Figuur 9a , i.14).
OPMERKING: Het label van de knop verandert als u klikt.
5. Na het verwerken van het gegevensbestand
- Start de LPPT-postverwerkingssoftware. Klik op de knop 'laden' en kies het meetbestand in het dialoogvenster bestand. Klik op "OK" om het dataformaat van de camera om te zetten naar dataformaat na verwerking ( zie afbeelding 10a ).
OPMERKING: De IR-camera gegevens worden opgeslagen op de IR camera control PC in een native formaat. De infraroodcontrole software ontwikkelingskit wordt gebruikt om de IR camera sequentie om te zetten in een 3-dimensionale matrix (pixel X, pixel Y, frame nummer) en eenKoptekst inclusief een timing vector t. - Transformeer de IR camera data naar het PDK domein ( zie Figuur 10b ), door de coördinaten van de vier projectiepunten P1x naar P4y van stap 3.4.3 in te voegen en te klikken op "Transformeren".
OPMERKING: Door de beeldprojectie via de gouden spiegel naar de IR-camera ( zie afbeelding 4g ) wordt het resulterende IR-beeld vervormd. Een affine geometrische transformatie wordt uitgevoerd vanuit het IR camera domein naar het PDK domein. Het resultaat is een matrix met een grootte van 1.024 x 768 x frame nummer. - Ontlucht de temperatuur informatie op de uitputting lijn ( zie figuur 10c ).
- Definieer de uitputting lijn met twee punten L1 en L2 door de velden L1x = Lx2 = "512" pixel te vullen, zoals het al in stap 4.1.2 werd gekozen. Kies y van L1y = "343" naar L2y = "393". Zie figuur 10c .
OPMERKING: Door de transformatie in stap 5.2) kunnen de gegevens zijnOnmiddellijk opgehaald, maar bijwerkingen optreden omdat het monster slechts gedeeltelijk verlicht is. Beoordeel daarom niet de randgebieden van de patronen. Als het geluid nog te hoog is, kan de grootte van y worden verhoogd. - Stel de experimentele parameters voor de IR camera in door de volgende velden in te vullen: FrameRate als "40" Hz, frequentie als "0.125" Hz, snelheid v als "0.05" mm / s en startpositie xStart als "-5" mm ( cf. Figuur 10c ). Stel de parameters voor data post-processing: "Fit Degree" = "7", "Smoothing" = "20" en "Hilbert" = "500" zoals in Figuur 10c .
OPMERKING: De data die bij de uitputtingslijn wordt geëxtraheerd, is geometrisch gemeten. Daarna wordt de alternatieve temperatuurterm A Δ (zie Figuur 11a, b ) opgehaald door een polynoompas (Fit Degree) uit te voeren. Het resulterende signaal wordt glad gemaakt door een bewegend gemiddelde filter (Smoothing).Tenslotte wordt een Hilbert-transformatie toegepast om de momentane amplitude te herhalen. Een ander bewegend gemiddelde filter (Hilbert) wordt toegepast om restranden te verminderen. Met behulp van informatie op het amplitude minimum wordt de positie van het verborgen defect verkregen. - Klik op 'Evalueren' om de data-analyse uit te voeren. Lees de berekende positie van het defect van het veld "CrackPosition [mm]". De defectpositie wordt weergegeven in het venster van Figuur 10d .
- Definieer de uitputting lijn met twee punten L1 en L2 door de velden L1x = Lx2 = "512" pixel te vullen, zoals het al in stap 4.1.2 werd gekozen. Kies y van L1y = "343" naar L2y = "393". Zie figuur 10c .

Figuur 3: Foto van de experimentele opstelling met gemarkeerd optisch pad (rode lijn). De laservezelbevestiging is bevestigd aan de vezel van de diode laser. De straal wordt aangepast door de telescoop naar de ingangsdiameter van de PDK. Voordat u de PDK binnenkomt, wordt de bundel gesplitst door de straalsamensteller en gecontroleerd door de stroommeter. Binnen de PDK wordt de bundel gehomogeniseerd aNd geprojecteerd naar een DMD. De PDM, gecontroleerd door de LPPT control software, projecteert verlichtingspatronen aan het monster. Het geprojecteerde licht is fotothermisch omgezet en verhit het monster. De temperatuur wordt gemeten door een IR-camera via de thermische straling (oranje lijn) die uit het monsteroppervlak wordt uitgezonden. Het monster zelf is gepositioneerd op de lineaire vertaalstadium. Klik hier om een grotere versie van deze figuur te bekijken.

Figuur 4: Foto-sequentie die de aanpassing van de experimentele instelling weergeeft. (A) Bovenaanzicht van de experimentele opstelling toont een overzicht. ( B ) Uitlijning van de telescoop: De kruispunten worden gebruikt om de lens naar de optische as van de laserstraal te centreren. ( C ) Alignment van de optische elementen: Een bar systeem mounteD naar de optische bank wordt gebruikt om de optische straal ten opzichte van de bank af te stemmen. Een hoogte-vaste iris wordt gebruikt om de balk parallel aan de bank te houden. ( D ) Foto van de zijaanzicht van het koppelpunt tussen projector en balk. De crosshairs worden gebruikt om de projector op de balk uit te stemmen. ( E ) De transmissie van het projectorsysteem bepalen: De stroommeter wordt gebruikt voor het meten van de optische stroom voor en na de projector. ( F ) Bepaling van het straalprofiel: Pinhole- en ND1-filter worden aan de diode gemonteerd die via twee lineaire stappen via het geprojecteerde beeld wordt verplaatst. De projector moet geconfigureerd worden om een witte afbeelding te projecteren. ( G ) Plaatsing van de infraroodcamera op het monster via een gouden spiegel: Het monster moet in het beeldvlak van de projector gepositioneerd worden. Om de vermogensdichtheid te kunnen beheren, kunnen de objectieven en extra lenzen die aan het doel zijn verbonden, worden gebruikt. ( H ) BepalingVan de schaal tussen geprojecteerd beeld, IR-camerabeeld en de werkelijke lengte van het monster. Klik hier om een grotere versie van deze figuur te bekijken.

Figuur 5: Software screenshots. (A) Screenshot van LPPT lasercontrole software. ( B ) PDK-besturingssoftware: De stappen i.1 tot en met i.3 tonen hoe u de PDK configureert als een gewone projector. Klik hier om een grotere versie van deze figuur te bekijken.

Figuur 6: Correctie van het inhomogene straalprofiel. (A) Stralingsprofiel van het geprojecteerde witte beeld (volledige verlichting) genomen door a Fotodiode die door het profiel werd verplaatst. De gegevens tonen een inhomogeen straalprofiel met een vooraanstaande piek in het midden. ( B ) Het doorsnede lijnprofiel dat overeenkomt met de rode lijn in a). ( C ) Correctiebeeld dat op het SLM overgebracht wordt met het geprojecteerde witte beeld om het niveau van inhomogeniteit te verminderen. ( D ) Het bijbehorende doorsnede lijnprofiel van de rode lijn in c). ( E ) Resultaatbalkprofiel na correctie die een profiel dichter bij een bovenhoedprofiel toont. ( F ) Het bijbehorende doorsnede lijnprofiel van de rode lijn in e). ( G ) Verlichtingsprofiel van twee gecorrigeerde patronen. De patronen worden gemoduleerd met dezelfde frequentie en amplitude maar met tegengestelde fasen die een zone van destructieve interferentie tussen de patronen creëren. ( H ) Het bijbehorende doorsnede lijnprofiel van de rode lijn in g). Ve.com/files/ftp_upload/55733/55733fig6large.jpg "target =" _ blank "> Klik hier om een grotere versie van deze figuur te zien.

Figuur 7: Voorbeeldbereiding. (A) Foto van het monsteroppervlak met een blok zwart gecoat constructiestaal St37 (20 mm x 0,5 mm x 15 mm). ( B ) Transparante CAD tekening van de ondergrondse defecten. De gebreken bevinden zich 40 mm van de rechterkant. ( C ) Zijaanzichtfoto's van de monsters die de geïdealiseerde defecten op verschillende diepten onder het oppervlak tonen (zij 1 = 0,25 mm, zij 2 = 0,5 mm, zij 3 = 0,7 mm, zijde 4 = 1,25 mm). De monsterzijden zijn niet gelakt om de warmteverliezen te verminderen. Het tweede monster (niet afgebeeld) heeft zijn ondergrondse defecten aan: zij 1 = 1 mm, zij 2 = 1,5 mm, zij 3 = 1,75 mm, zij 4 = 2 mm.= "_ Blank"> Klik hier om een grotere versie van deze figuur te zien.

Afbeelding 8: Screenshots van de IR-besturingssoftware. Stappen i.1 tot en met I.5 tonen hoe u de IR-camera configureert voor gegevensverzameling. (A) Screenshot van "Camera" -paneel: de IR-camera kan via de "Connect" -knop worden aangesloten op de IR-camera. Het bedieningspaneel 'Remote' (b) en het acquisitiepaneel (d & e) kunnen vanaf hier worden bereikt. Bovendien kan de meting starten via de "Record" knop. ( B ) Screenshot van het "Acquisition" paneel: de IR camera moet worden geconfigureerd via "Ext / Sync" om een frame vast te leggen als het een 5 V TTL trigger ontvangt. ( C ) Screenshot van "Measure" paneel: het data display bereik kan worden aangepast met de "Selection" knop. Punt- en regelgereedschapWorden gebruikt om het IR-camerabeeld te kalibreren naar echte wereldcoördinaten. ( D ) Screenshot van de IR-camera afstandsbediening "Kalibraties" paneel. Een klein meetbereik (-10 tot 60 ° C) moet gekozen worden om een hoge gevoeligheid te bereiken. ( E ) IR-afstandsbedieningspaneel: "Process-IO", "IN1" en "IN2" moeten worden ingeschakeld om de IR-camera te activeren. Klik hier om een grotere versie van deze figuur te bekijken.

Figuur 9: Screenshots van de LPPT-besturingssoftware. De workflow voor gebruikersinteracties met de software is gemarkeerd met stappen i.1 tot en met i.14. (A) Screenshot van het LPPT hoofdpaneel; "Geactiveerd?" Is een Boolean type en activeert het podium als waar. "Start-" en "EndPosiDe velden "Velocity" worden in mm / s gedefinieerd. De knop "Startmeting" begint metingen, opent het dialoogvenster dat in paneel (b) wordt weergegeven en stopt de meting als het vals is. ( B ) Screenshot van de gebruikersinterface die wordt gebruikt om de patronen te projiceren. Een kleur is gekozen om een gebied van pixels te vertegenwoordigen. Het gebied wordt gekozen door rechthoeken op de afbeelding te trekken. Als de knop 'Area Definiëren' wordt ingedrukt, In het paneel (c) wordt het paneel weergegeven om de eigenschappen van het gebied te definiëren. Nadat alle gebieden zijn gedefinieerd, zal de knop "calc Frames" een reeks beelden berekenen. "Load Correction" geeft een dialoogvenster om de correctie te laden Afbeelding om een inhomogeen straalprofiel te voorkomen. De knop "Start" begint de meting. ( C ) Screenshot van de gebruikersinterface die gebruikt wordt om de eigenschappen van een patroon in te stellen. Het bovenste frame toont het signaal type (sinusgolf), faseverschuivingIn graden en frequenties in Hz. Het onderste frame toont frames per periode, amplitude van 1 tot 127 en laserspanning (0 V tot 10 V = 0 W tot 500 W). Frames per periode is de waarde die voorspelt hoe fijn een periode is gediscretiseerd. Nadat de knop "Next" (verder) is geduwd, verschijnt een dialoogvenster en vraagt u om de camerabeeldsnelheid in Hz en de schakelfrequentie in Hz. Klik hier om een grotere versie van deze figuur te bekijken.

Figuur 10: Screenshots van de LPPT post-processing software. (A) Laad en transformeer het native IR camera data formaat. ( B ) Transformeer de kadermatrix naar het projectorcoördinatensysteem door gebruik te maken van de transformatiepunten P1x naar P4y. ( C ) L1x tot L2y vertegenwoordigen de pixelcoördinaten van de geëvalueerde lijn. &# 34; v "," xStart "," FrameRate "en" Frequency "zijn experimentele parameters." V "is de snelheid in mm / s," xStart "de startpositie van het podium in mm," FrameRate "en" Frequency "Geplaatst in Hz." Fit Degree "," Smoothing "en" Hilbert "zijn evaluatieparameters. Fit Degree vertegenwoordigt de mate van de polynomiale pasvorm," Smoothing "staat voor het aantal elementen voor een bewegend gemiddeld filter dat gebruikt wordt om geluidsoverlast te verminderen en De parameter "Hilbert" wordt gebruikt om het niveau van gladingen vast te stellen om de minimale curve te vinden. ( D ) Screenshot van het resultaat dat de kraakpositie vertoont als een verticale streeplijn. Klik hier om een grotere versie van deze figuur te zien.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Na het protocol werd pagina 1 van het staalmonster met een ondergrond defect op een diepte van 0,25 mm gekozen om representatieve resultaten te genereren. Het defect was aanvankelijk gepositioneerd ongeveer in het midden van het verlichte gebied. Het monster werd vervolgens verplaatst van -5 mm tot 5 mm via het lineaire stadium met een snelheid van 0,05 mm / s. Met behulp van deze parameters, toont Figuur 11a de scangegevens na het verwijderen van deze uit de uitputting lijn. Op dit moment kan het succes van het experiment worden geraamd, aangezien de ruwe gegevens beschikbaar zijn in de IR-besturingssoftware als voorbeeld (optioneel: gebruik het regelprogramma om de gegevens te bekijken, zie figuur 8 , stap i.4) . Na verdere signal post-processing toont figuur 11b de defectpositie op minimaal de Hilbert-curve (blauw) op 0,3 mm.
Om het experiment te valideren, moet de curve hAve de volgende eigenschappen: het moet symmetrisch zijn, een uitgesproken minimum hebben op het symmetrievlak en twee gelijke maxima naar links en rechts. De maxima ontstaan omdat de warmtestroom van een van de lijnbronnen over de andere domineert door de accumulatie van warmte bij het defect. Dit is vooral het geval wanneer het defect dicht bij het symmetrievlak ligt. Het defect vormt een belemmering voor de warmtestroom, zodat we de warmtestroom van de overheersende bron kunnen waarnemen en zijn weerspiegeling van het defect. Als het defect symmetrisch in het midden is gepositioneerd, verdeelt de warmteflow gelijk, wat resulteert in een minimum van 1 .
Het effect van de scansnelheid is weergegeven in figuur 11c . Hier werd de scan snelheid verdubbeld tot 0,1 mm / s om hetzelfde defect te beoordelen. Vooraf werd het monster licht op het podium verschoven om een andere relatieve positie te krijgen. De defectpositie werd bepaald-2 mm zijn. Het verlengingsniveau was vergelijkbaar met de gegevens die worden getoond in Figuur 11a , waarbij goede reproduceerbaarheid van het experiment is aangetoond, maar met minder oscillaties. Aangezien de maximale verlenging correleert met de diepte van het defect, kunnen ook informatie over positie en diepte worden gehandhaafd 1 .
Figuur 11d toont een suboptimale dataset. Het defect was 1 mm onder het oppervlak, dat is bijna bij de detectiegrens van deze diffusie lengte en de beschikbare optische kracht. Hoewel de locatie van het defect nog kan worden bepaald, is de meetonzekerheid groter omdat de locatie van de zero-oscillatie al geraakt is door geluid. Uit dit gedrag kunnen we afleiden dat de meest voor de hand liggende tekenen voor een defect van het defect detectie experiment zijn als de uitputting lijn volledig verdwijnt of als er een sterk asymmetrisch gedrag is. Dit kan het gevolg zijn van de folloVleugel redenen: (i) de ruimtelijke resolutie van de IR camera is niet voldoende en de uitputting lijn niet goed kan worden opgelost, (ii) het geluid van de camera te hoog is in vergelijking met de temperatuurstijging, (iii) het verlichtingspatroon is Inhomogene en niet correct is gecorrigeerd, iv) de gekozen stadiumsnelheid te hoog is in vergelijking met de modulatiefrequentie van het verlichtingspatroon, en (v) de thermische diffusielengte (via de modulatie frequentie) niet is aangepast aan het defect diepte.

Figuur 11: Representatieve dataset van experimenten om ondergrondseffecten te lokaliseren. (A) Representatieve experimentele gegevens van het St37-monster, zijde 1 met een defect op een diepte van 0,25 mm. De zwarte lijn toont de temperatuur informatie over de tijd (bovenas). Door het podium te vertalen met een snelheid van v = 0,05 mm / s, is de positieOpgehaald (onderste as). De rode kromme toont een polynomiale pasvorm ( 7e graad) die gebruikt wordt om de wisselende temperatuurcomponent te verkrijgen. De gestippelde rode lijn geeft de positie van het ondergrondse defect weer. ( B ) De zwarte curve geeft de afwisselende temperatuurgrafiek weer die wordt verkregen door de polynoompas af te trekken uit de temperatuurgegevens van het paneel (a). De blauwe curve werd verkregen door Hilbert transformatie aan de zwarte kromme toe te passen en te gemiddelde. ( C ) Representatieve experimentele gegevens van dezelfde kant over een bereik van -7 mm tot 3 mm bij een stadiumsnelheid van 0,1 mm / s. De frequentie wordt gehalveerd, maar de verlenging is vergelijkbaar met paneel (a). ( D ) Suboptimale experimentele data verkregen bij het ondergrondse defect op 1 mm diepte. Klik hier om een grotere versie van deze figuur te bekijken.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Het gepresenteerde protocol beschrijft hoe u kunstmatige ondergrondseffecten kunt lokaliseren die loodrecht op het oppervlak zijn gericht. Het hoofdgedachte van de methode is het creëren van interfererende thermische golfvelden die interfereert met het ondergrondse defect. De belangrijkste stappen zijn: (i) het combineren van een SLM met een diode laser om twee alternerende high power verlichtingspatronen op het monster oppervlak te maken; Deze patronen worden fotothermisch omgezet in coherente thermische golfvelden, (ii) hen destructief te interfereren terwijl er een ondergrondse defect optreedt, en (iii) deze defecten te lokaliseren vanuit een oppervlakscan van de dynamische temperatuur van het monsteroppervlak met behulp van een thermische beeldvorming IR camera. Aangezien alleen de relatieve oscillatie van de temperatuur rond een langzame variabele gemiddelde waarde en niet de absolute temperatuurwaarde nodig is, is deze aanpak extreem gevoelig voor verborgen gebreken 1 .
Een van de meest kritische stappenBinnen het protocol is voldoende homogeniteit van het verlichtingsbundelprofiel vastgesteld bij gebruik van een SLM-gekoppelde laserbron voor gestructureerde verwarming (zie stap 1.10). De diode laser biedt een hoge bestraling maar moet in de projector met de SLM worden gevoed met de juiste straaldiameter en richting. Door kleine onvermijdelijke geometrische en spectrale mismatches met het eigen optische pad binnen de projector wordt de gegenereerde afbeelding op het monster vervormd. Daarom wordt een numerieke correctie van de beeldintensiteitswaarden die het geprojecteerde beeld regelen, uitgevoerd met een referentiebundelprofielmeting. Een tweede kritische stap voor een succesvol experiment is het bereiken van een hoge ruimtelijke resolutie van het IR-beeld (zie stappen 3.3.7-3.3.8). De uitputting zone moet voldoende ruimtelijk opgelost zijn, anders geen uitputting en daarom kan geen defectpositie worden gemeten.
De aard van de toegepaste thermische golven is diffusieachtigProces dat leidt tot een sterke verzwakking van hun amplitude over enkele millimeters. We voldoen aan deze intrinsieke fysieke beperking door gebruik te maken van een high-power diode laser als lichtbron. De knelpunt van de huidige experimentele opstelling is de thermische spanningsgrens van de SLM 21 , wat betekent dat er slechts een fractie van de beschikbare laserkracht kan worden toegepast. Onze huidige oplossing is om het monsteroppervlak te bekleden met een zwarte grafietlaag. In de toekomst verwachten we opstellingen met hogere gevoeligheid door gebruik te maken van geoptimaliseerde lichtmotoren of zelfs omschakelbare directe laser arrays, zoals high-power verticaal-holte oppervlak-emitterende laser (VCSEL) arrays 22 .
Het belangrijkste verschil tussen deze methode en de bestaande thermische beeldvorming bij niet-destructief testen is het feit dat we de destructieve interferentie van volledig coherente thermische golfvelden gebruiken; Wat alleen mogelijk is na controle over amplitude en fase van een set van individuele liBronnen op een deterministische manier. Binnen de bestaande thermografische methoden wordt gebruik gemaakt van een platte lichtbron, geregeld in het tijddomein, of een enkele gefocusterde laserplek, die in het ruimtelijke domein wordt geregeld. Het grote voordeel van onze aanpak is hoge gevoeligheid voor defecten die loodrecht op het monsteroppervlak liggen.
Tot nu toe zijn er slechts twee individuele lichtbronnen gecreëerd. Met de lasergekoppelde SLM kunnen we in principe maximaal 1 miljoen individuele lichtbronnen - een miljoen warmtebronnen - op het monsteroppervlak genereren en regelen. Het is duidelijk dat deze aanpak de mogelijkheden van willekeurige thermische golfvorming op lange termijn opent en overdrachtstechnieken van ultrasone of radar naar het veld van actieve thermografie binnen fysieke grenzen oplevert. Zodra de bestralingsuitdaging zoals hierboven vermeld ( dwz optische vermogen per geprojecteerde pixel) op bevredigende wijze is opgelost, moeten zelfs kleinere defecten die zich onder het oppervlak bevinden zich detecteerbaar zijn. Dusver,Staal is getest, maar de methode is zeer veelbelovend, vooral voor kunststoffen, samengesteld materiaal en andere gevoelige materialen, door de lage thermische spanning toegepast.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
De auteurs hebben niets te onthullen.
Acknowledgments
We willen Taarna Studemund en Hagen Wendler bedanken voor het maken van foto's van de experimentele opstelling en het voorbereiden van ze voor publicatie van figuren. Verder willen we Anne Hildebrandt bedanken voor de steekproefvoorbereiding en Sreedhar Unnikrishnakurup, Alexander Battig en Felix Fritzsche voor het proeflezen.
Materials
| Name | Company | Catalog Number | Comments |
| 500 W diode laser system, 940 nm | Laserline | LDM 500 - 20 | Pilot laser class 2 @ 650 nm, diode laser is a class 4 laser system --> special laboratory needed |
| Laser control box | Laserline | Laser control box LDM | Add on to the laser system, used to switch electronically, laser threshold, shutter, laser on 0 V..5 V TTL |
| Control box scanner | Laserline | Add on to the laser system, used to adjust the optical output power via analog signal from 0 V..10 V | |
| Fiber Laser Mount 2", f = 80 mm | Laserline | Add on to the laser system | |
| Multifunction Data Aquisition (DAQ) Device + BNC Terminal | National Instruments | NI-USB 6251 | The DAQ card is used to trigger the IR camera, the DLP Light Commander 5500, control Laser and diode PDA 36A |
| Standard - PC | Control PC - graphic card for two screens, at least 4 x USB, Windows based | ||
| BNC cabel | Standard cable | ||
| HDMI cable | Standard cable | ||
| Micro USB to USB cable | Standard cable | ||
| LabVIEW 2013 SP1 Development System | National Instruments | Development environment for device control | |
| LPPT control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT intensity software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT laser control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| Matlab 2016b | MathWorks | Postprocessing of the measurement data | |
| LPPT postprocessing software | BAM | Postprocessing of the measurement data | |
| IR camera control PC | InfraTec | Control PC is supplied by camera distributor | |
| IR camera control software | InfraTec | Irbis 3 Professional | |
| InfraTec SDK | InfraTec | Dynamic Link Library as interface between the native data aquisition format of Infratec and Matlab | |
| IR camera | InfraTec | Image IR 8300 | 640 x 512, cooled InSb detector, wavelength 2 µm..5.7 µm, noise = 20 mK + accessories (LAN cable, Digital in/out cable, space ring, power supply, case) |
| Tripod | Manfrotto | 161MK2B | |
| IR camera mount | Manfrotto | 405 | |
| Projector development kit (PDK) for digital light processing (DLP) technology (DLP Light Commander 5500) | Logic PD | DLP-LC-DLP5500-10R | DLP5500 Digital Micromirror Device from Texas Instruments included , light engine and case need to be disassembed |
| PDK control software | Logic PD | Included when delivered, DLP Light Commander control software | |
| Mechanical platform for the PDK | BAM | Self made (140 x 230 x 420) mm3 | |
| Power meter control unit | Ophir | Vega | USB Interface |
| 30 W power meter head | Ophir | 30(150)A-LP1-18 | Power meter head to determine Transmission of the projector system |
| 500 W power meter head | Ophir | FL500A | Power meter for process supervision |
| Motion controller | Newport | ESP301 | with USB Interface |
| Translation stage | Newport | M-ILS200CC | Connected to ESP301 |
| Photodiode with amplifier | Thorlabs | PDA 36A-EC | 1" mount |
| Reflective filter ND1 | Thorlabs | ND10A | to be mounted to the PDA 36A |
| Pinhole 1" | Thorlabs | P1000S | to be mounted to the PDA 36A |
| Optical aluminium breadboard | Thorlabs | MB60120/M | (1,200 mm x 900 mm) base |
| Plano Convex Lens f = 200 mm | Thorlabs | LA1979-B | Coated for IR, first telescope lens |
| Plano Convex Lens f = 75 mm | Thorlabs | LA1145-B | Coated for IR, second telescope lens |
| xy-translation stage | Newport | M401 | Used for adjusting the telecope |
| Beamsampler | Thorlabs | BSF20-B | Splits the optical output, used to reduce the optical input for the projector system |
| Mirror | Thorlabs | BB2-E03 | Mirror for coupling the beam to the DLP Light Commander |
| Heavy duty lab jack | Thorlabs | L490 | Used for the fiber mount and on top of the linear stage to position the sample (2x) |
| PDK-objective | Nikon | Nikon AF Nikkor 50 mm 1:1:8:D | Objective for DLP Light Commander, 50 mm |
| Plano Convex Lens f = 100 mm | Thorlabs | LA1050 -B | Lens is attached to the Nikon Objective |
| Bi-Convex Lens f = 60 mm | Thorlabs | LB1723 -B | Lens to be attached to the Nikon objective in order to determine the optical transmission with the 30 W measurement head |
| Square protected gold mirror | Thorlabs | PFSQ20-03-M01 | |
| High power IR sensor card | Newport | F-IRC-HP-M | Sensor card to check the optical pathway |
| 2" crosshairs | BAM | Self-made | |
| 1" crosshairs | BAM | Self-made | |
| Bullseye level | Thorlabs | LCL01 | |
| Translation Stage | Newport | M-UMR8.25 | Used for measuring the beam profile |
| Micrometer screw | Newport | DM17-25 | Used with translation stage M-UMR8.25 |
| Mounted Zero Aperture Iris | Thorlabs | ID75Z/M | used to check the optical pathway |
| Bases and Post Holders Essentials Kit, Metric and Universal Components | Thorlabs | ESK01/M | Basis |
| Posts & Accessories Essentials Kit, Metric and Universal Components | Thorlabs | ESK03/M | |
| M6 Cap Screw and Hardware Kit | Thorlabs | HW-KIT2/M | |
| Construction Rails | Thorlabs | XE25L700/M | |
| 1" Construction Cube | Thorlabs | RM1G | Used to mount construction rails |
| Electrical discharge machining | Sodick | AG60L | www.sodick.de |
| St37 block of steel (100 x 100 x 40) mm3 |
BAM | self-made, hidden defect with remaining wall thicknesses of 0.25 mm, 0.5 mm, 0.70 mm, 1.25 mm (shown in Figure 5) | |
| St37 block of steel (100 x 100 x 40) mm |
BAM | self-made, hidden defect with remaining wall thicknesses of 1 mm, 1.5 mm, 1.75 mm, 2 mm (shown in Figure 5) | |
| Graphite spray | CRC Industries Europe NV | GRAPHIT 33 | Ref. 20760, 200 mL aerosol (Kontakt-Chemie) |
| Protective tape | Tesa | tesakrepp 4348 | used to protect the hidden defects while coating |
References
- Thiel, E., Kreutzbruck, M., Ziegler, M. Laser-projected photothermal thermography using thermal wave field interference for subsurface defect characterization. Appl. Phys. Lett. 109 (12), 123504 (2016).
- Ibarra-Castanedo, C., Tarpani, J. R., Maldague, X. P. V. Nondestructive testing with thermography. Eur. J. Phys. 34 (6), 91-109 (2013).
- Maldague, X. P. Introduction to NDT by active infrared thermography. Mater. Eval. 60 (9), 1060-1073 (2002).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning pulsed laser spot thermography. Ndt&E Int. 44 (2), 216-225 (2011).
- Lugin, S. Detection of hidden defects by lateral thermal flows. Ndt&E Int. 56, 48-55 (2013).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning laser-line thermography and laser-spot thermography. Meas. Sci. Technol. 22 (3), (2011).
- Pech-May, N. W., Oleaga, A., Mendioroz, A., Salazar, A. Fast Characterization of the Width of Vertical Cracks Using Pulsed Laser Spot Infrared Thermography. Journal of Nondestructive Evaluation. 35 (2), 22 (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. SPIE 9761. Douglass, M. R., King, P. S., Lee, B. L. , Spie-Int Soc Optical Engineering. (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. WCNDT 2016. , 6 (2016).
- Mandelis, A. Diffusion-Wave Fields: mathematical methods and Green functions. , Springer-Verlag. (2001).
- Almond, D., Patel, P. Photothermal Science and Techniques. 10, Chapman & Hall. (1996).
- Salazar, A. Energy propagation of thermal waves. Eur. J. Phys. 27 (6), 1349-1355 (2006).
- Bennett, C. A., Patty, R. R. Thermal wave interferometry: a potential application of the photoacoustic effect. Appl. Opt. 21 (1), 49-54 (1982).
- Busse, G. Stereoscopic depth analysis by thermal wave transmission for nondestructive evaluation. Appl. Phys. Lett. 42 (4), 366 (1983).
- Holtmann, N., Artzt, K., Gleiter, A., Strunk, H. P., Busse, G. Iterative improvement of Lockin-thermography results by temporal and spatial adaption of optical excitation. Qirt J. 9 (2), 167-176 (2012).
- Pribe, J. D., Thandu, S. C., Yin, Z., Kinzel, E. C. Toward DMD illuminated spatial-temporal modulated thermography. Proc. SPIE 9861. , (2016).
- Ravichandran, A. Spatial and temporal modulation of heat source using light modulator for advanced thermography. , Missouri University of Science and Technology. (2015).
- DLP 0.55 XGA Series 450 DMD. , TexasInstruments. (2015).
- Application Note - DLP System Optics. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?baseLiteratureNumber=dlpa022&keyMatch=dlpa022&tisearch=Search-EN-Everything (2010).
- DLP LightCommander Control Software - User Manual. , LogicPD. Available from: https://support.logicpd.com/ProductDownloads/LegacyProducts/DLPLightCommander.aspx?_sw_csrfToken=318b0448 (2011).
- White Paper - Laser Power Handling for DMDs. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?literatureNumber=dlpa027&fileType=pdf (2012).
- Moench, H., et al. High-power VCSEL systems and applications. Proc. SPIE 9348. , (2015).
