

Summary
Denne metoden tar sikte på å lokalisere vertikale undergrunnsdefekter. Her kobler vi en laser med en romlig lysmodulator og utløser dens videoinngang for å oppvarme en prøveoverflate deterministisk med to antifase modulerte linjer samtidig som man får høyt oppløste termiske bilder. Feilposisjonen hentes fra evaluering av termisk bølgeinterferensminima.
Abstract
Den presenterte metoden brukes til å lokalisere undergrunnsdefekter orientert vinkelrett på overflaten. For å oppnå dette skaper vi destruktivt forstyrrende termiske bølgebelter som er forstyrret av defekten. Denne effekten måles og brukes til å lokalisere feilen. Vi danner de ødeleggende forstyrrende bølgefeltene ved å bruke en modifisert projektor. Den originale lyskilden til projektoren er erstattet med en fiberkoblet høy-effektdiodelaser. Strålen er formet og justert til projektorens romlig lysmodulator og optimalisert for optimal optisk gjennomstrømning og homogen projeksjon ved først å tegne stråleprofilen, og for det andre korrigere den mekanisk og numerisk. Et høyytelses infrarødt (IR) kamera settes opp i henhold til den stramme geometriske situasjonen (inkludert korreksjoner av geometriske bildeforvrengninger) og kravet om å oppdage svake temperaturoscillasjoner på prøveoverflaten. Datainnsamling kan utføres en gang til en synkroniseringRonisering mellom de enkelte termiske bølgefeltkildene, skannefasen og IR-kameraet er etablert ved å bruke et dedikert eksperimentelt oppsett som må tilpasses det konkrete materialet som undersøkes. Under data etterbehandling blir den relevante informasjonen om tilstedeværelsen av en defekt under overflaten av prøven ekstrahert. Den hentes fra den oscillerende del av den oppkjøpte termiske strålingen som kommer fra den såkalte uttømningslinjen på prøveoverflaten. Den nøyaktige plasseringen av defekten er utledet fra analysen av den romlige temporale formen til disse svingninger i et siste trinn. Metoden er referansefri og svært følsom for endringer innen termisk bølgefelt. Så langt har metoden blitt testet med stålprøver, men gjelder også for forskjellige materialer, særlig temperaturfølsomme materialer.
Introduction
Den laserprojiserte fototermiske termografiprofilen (LPPT) brukes til å lokalisere undergrunnsdefekter som er innebygd i prøvenes volum og orientert overveiende vinkelrett på overflaten.
Metoden bruker destruktive interferens av to anti-fasede termiske bølgefelt med samme forlengelse og frekvens som vist i figur 1b . I isotrope defektfrie materialer nøytraliserer termisk bølger destruktivt ( dvs. null temperatur oscillasjon) ved symmetriplanet ved koherent superposisjon. I tilfelle et materiale med en undergrunnsdefekt, benytter metoden samspillet mellom de laterale komponentene ( dvs. i flyet) mellom forbigående varmestrøm og denne feilen. Denne interaksjonen kan måles i en gjentatt oscillerende temperaturforlengelse ved symmetrilinjen på prøveoverflaten. Nå blir den defekte prøven skannet av det overliggende termiske bølgefeltet ogNivået av temperaturforlengelse måles i forhold til prøveposisjonen. På grunn av symmetri er den destruktive interferenstilstanden fornøyd igjen når defekten krysser symmetriplanet; Dette gjør at vi kan finne defekten svært sensitivt. Siden nivået av maksimal forstyrrelse av destruktive interferens korrelerer med dybden av defekten, er det dessuten mulig å bestemme dens dybde ved å analysere temperaturskanningen 1 .
LPPT kan tilordnes den aktive termografiske metoden, en veletablert ikke-destruktiv metode, hvor forbigående oppvarming genereres aktivt, og den resulterende, forbigående temperaturfordeling måles via et termisk IR-kamera. Generelt er følsomheten til denne metoden begrenset til feil som er orientert hovedsakelig vinkelrett på den forbigående varmestrømmen. Videre, siden den styrende forbigående varmeledningsekvasjon er en parabolisk partiell differeNtial likning, er varmestrømmen i volumet sterkt dempet. Som en konsekvens er undersøkelsesdybden for den aktive termografiske metodikk begrenset til et nær overflateområde, vanligvis i millimeterområdet. To av de vanligste aktive termografiteknikkene er pulserende og låsingstermografi. De er raske på grunn av plan optisk overflatebelysning 2 , men fører til en forbigående varmestrøm vinkelrett på overflaten. Derfor er følsomheten til disse teknikkene begrenset til mangler som hovedsakelig er orienterte parallelle ( f.eks. Delamineringer eller hulrom) til den oppvarmede prøveoverflate. En empirisk regel for pulserende termografi sier at "radiusen for den minste detekterbare feilen skal være minst en til to ganger større enn dens dybde under overflaten" 3 . For å øke det effektive samspillingsområdet mellom en vinkelrett orientert defekt ( f.eks. En sprekk) og varmestrømmen, må retningen av varmestrømmen væreendret. Lokal eksitasjon, ved å bruke en fokusert laser med et lineært eller sirkulært sted, for eksempel, genererer en varmestrøm med en in-plan-komponent som er i stand til å effektivt samvirke med den vinkelrette defekten 4 , 5 , 6 , 7 .
I den presenterte metoden bruker vi også komponentene for lateral varmestrømning for å oppdage undergrunnsdefekter, men vi bruker det faktum at termiske bølger kan legges over, mens feil, spesielt vertikalt orienterte, forstyrrer denne superposisjonen. På denne måten ligner den presenterte metoden en referansefri, symmetrisk og meget sensitiv metode, da det er mulig å oppdage kunstige undergrunnsdefekter ved bredde / dybdeforhold langt under en 8 , 9 . Inntil nå var det vanskelig å opprette to anti-fasede termiske bølgefelt som tilveiebringer tilstrekkelig energi. Vi oppnådde dette bY kobler en romlig lysmodulator (SLM) til en høykvalitetsdiodelaser, som gjorde det mulig for oss å slå sammen den høye optiske effekten til lasersystemet med den romlige og tidsmessige oppløsningen til SLM (se figur 2 ) i en høyspenningsprojektor . De termiske bølgefeltene er nå opprettet ved fototermisk konvertering av to antifasede sinusformet modulerte linjemønstre via piksellysstyrken til det projiserte bildet (se figur 2 , figur 1a ). Dette fører til strukturert oppvarming av prøveoverflaten og resulterer i veldefinerte destruktivt forstyrrende termiske bølgefelt. For å finne en undergrunnsdefekt måles forstyrrelsen av destruktive inngrep som en temperaturoscillering ved overflaten ved hjelp av et IR-kamera.
Begrepet termisk bølge, diskuteres kontroversielt fordi termiske bølger ikke transporterer energi på grunn av den diffusive karakteren av varmeutbredelsen. Likevel er det bølge-lignende atferd når hea Ting periodisk, slik at vi kan bruke likheter mellom virkelige bølger og diffusjonsprosesser 10 , 11 , 12 . Således kan en termisk bølge forstås som svært dempet i forplantningsretningen, men periodisk over tid ( figur 1b ). Den karakteristiske termiske diffusjonslengden  Beskrives herved av dets materielle egenskaper (termisk ledningsevne k , varmekapasitet c p og tetthet p ) og eksitasjonsfrekvensen ƒ. Selv om den termiske bølgen faller sterkt, kan dens bølge natur brukes for å få innblikk i egenskapene til prøven. Den første applikasjonen av termisk bølgeinterferens ble brukt for å bestemme lagets tykkelse. I motsetning til metoden ble interferenseffekten brukt i dybdimensjonen ( dvs. vinkelrett på overflaten) Ref "> 13. Utvidelsen av ideen om interferens med en andre dimensjon ved å dele opp en laserstråle, var termisk bølgeinterferens brukt til å dimensjonere undergrunnsdefekter 14. Likevel ble denne metoden anvendt i overføringskonfigurasjon, hvilket betyr at den var begrenset av penetrasjonen Dybden av termisk bølge. Dessuten, fordi bare en laser kilde er brukt, gjelder denne metoden konstruktiv interferens, noe som betyr at det mangler en defektfri referanse. Bortsett fra ideen om å bruke termisk bølgeinnblanding, er den første tekniske tilnærmingen til romlig og Temporalt kontrollert oppvarming ble utført av Holtmann et al. Ved å bruke en umodifisert LCD-projektor med den innebygde lyskilden, som var sterkt begrenset i sin optiske utgangseffekt 15. Ytterligere tilnærminger av Pribe og Ravichandran, som har til formål å øke optisk Utgangseffekt ved å også kopiere en laser til en SLM 16 , S = "xref"> 17.
Beskrives herved av dets materielle egenskaper (termisk ledningsevne k , varmekapasitet c p og tetthet p ) og eksitasjonsfrekvensen ƒ. Selv om den termiske bølgen faller sterkt, kan dens bølge natur brukes for å få innblikk i egenskapene til prøven. Den første applikasjonen av termisk bølgeinterferens ble brukt for å bestemme lagets tykkelse. I motsetning til metoden ble interferenseffekten brukt i dybdimensjonen ( dvs. vinkelrett på overflaten) Ref "> 13. Utvidelsen av ideen om interferens med en andre dimensjon ved å dele opp en laserstråle, var termisk bølgeinterferens brukt til å dimensjonere undergrunnsdefekter 14. Likevel ble denne metoden anvendt i overføringskonfigurasjon, hvilket betyr at den var begrenset av penetrasjonen Dybden av termisk bølge. Dessuten, fordi bare en laser kilde er brukt, gjelder denne metoden konstruktiv interferens, noe som betyr at det mangler en defektfri referanse. Bortsett fra ideen om å bruke termisk bølgeinnblanding, er den første tekniske tilnærmingen til romlig og Temporalt kontrollert oppvarming ble utført av Holtmann et al. Ved å bruke en umodifisert LCD-projektor med den innebygde lyskilden, som var sterkt begrenset i sin optiske utgangseffekt 15. Ytterligere tilnærminger av Pribe og Ravichandran, som har til formål å øke optisk Utgangseffekt ved å også kopiere en laser til en SLM 16 , S = "xref"> 17.
Protokollen som presenteres her beskriver hvordan man bruker LPPT-metoden for å finne undergrunnsdefekter orientert vinkelrett på overflaten av stålprøver. Metoden er på et tidlig stadium, men likevel kraftig nok til å validere den foreslåtte tilnærmingen; Det er imidlertid fortsatt begrenset i form av den oppnådde optiske utgangseffekten av forsøksoppsettet. Siden økningen av den optiske utgangseffekten forblir en utfordring, blir den fremstilte metode påført på belagt stål som inneholder kunstige elektrisk utladningsbearbeidede hakk. Ikke desto mindre holder de viktigste og mest kritiske trinnene i protokollen, som genererer en homogen strukturert belysning, møteforutsetninger for destruktiv termisk bølgeinnblanding, og lokalisering av defekten, fortsatt å holde for mer krevende feil også. Siden den styrende mengden er termisk diffusjonslengde μ, kan LPPT-metoden også påføres mange forskjellige materialer.
nt ">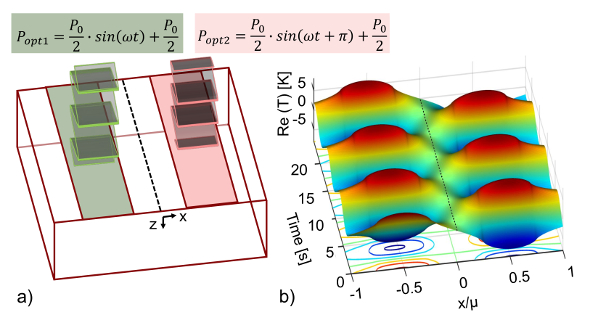
Figur 1: Prinsipp for destruktiv interferenseffekt. ( A ) Skjematisk av belysningsmønsteret som ble brukt under forsøkene. Prøven blir romlig og midlertidig oppvarmet av to periodisk opplyste mønstre med faseforskyvning av π. Den strekkede linjen representerer symmetrilinjen mellom begge mønstrene. Denne linjen vil bli brukt til evaluering som en "uttømmingslinje". ( B ) Diagram over det romlig og tidsmessig løst alternerende termisk resultat som beregnet fra den analytiske løsningen av termisk varmeledningsekvasjon. Den viser de reagerende termiske bølgene til belysningen av (a) med en bestråling av de to mønstrene med P opt 1 = 1,5 W sin (2π 0.125 Hz t ) + 1,5 W og P opt 2 = 1,5 W sin (2π 0.125 Hz t + Π) + 1,5 W for konstruksjonsstål ρ 3 , c p = 461 J / (kg · K), k = 54 W / (m · K). Temperaturprofilen på punktlinjen viser ingen termisk oscillasjon for homogent, isotropt materiale. Vennligst klikk her for å se en større versjon av denne figuren.

Figur 2: Skjematisk av måleprinsippet for strukturert oppvarming som brukes i aktiv termografi. En Gaussisk stråle som er homogenisert til en topphattprofil, blir brukt på en romlig lysmodulator (SLM). SLM løser strålen romlig ved hjelp av bryterelementene og temporært ved byttehastighet. Hvert element representerer en SLM-piksel. I dette eksperimentet er SLM en digital mikrospeil-enhet (DMD). Ved å modulere piksellysstyrken A med en tidsdeterministisk kontrollprogramvare, prøveoverflatenOppvarmes på en strukturert måte. I tilfelle det presenterte eksperimentet modulerer vi to anti-fasede linjer (faser: φ = 0, π), som er opprinnelsen til koherent forstyrrende termiske bølgefelt ved vinkelfrekvensen ω. Bølgefeltene samhandler med prøvenes indre struktur og påvirker også temperaturfeltet på overflaten. Dette måles via sin termiske stråling med et midtbølget infrarødt kamera. Vennligst klikk her for å se en større versjon av denne figuren.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
MERK: Forsiktig: Vær oppmerksom på lasersikkerhet fordi oppsettet bruker en klasse 4-laser. Vennligst bruk riktig beskyttelsesbriller og klær. Behandle også pilotlaseren med forsiktighet.
1. Koble diode laseren til projektorutviklingssettet (PDK)
- Forbered brødbrettet.
- Monter sammen alle enhetene på brødbrettet, som vist på figur 3 . Plasser brødbrettet med alle forhåndsinnstilte enheter i et laserlaboratorium.
- Plasser laserfiberfestet på brødbrettet.
- Fest fiberen til laserfiberfestet ( se figur 3 ).
- Bytt lukker og lasertærskel på diodelaseren på. Ved å bruke IR-sensorkortet med høy effekt, kontroller utgangsdiodens diameter (40 mm). Slå av laserstærskelen og pilotlaseren på. Juster høyden på den optiske aksen på laserfiberfestet til inngangen til PDK ved bruk avLab jack ( se figur 4a, 4d ).
- Flytt laserfibrefestet langs skinnen. Vær oppmerksom på pilotenes posisjon på avstand. Senterpunktet bør ikke bevege seg. I tilfelle det gjør, må du sjekke festet mellom lab jack og laser fiber mount. Fest laserfibermonteringen etterpå.
MERK: Skinnen er referansen for den optiske aksen og skal justeres parallelt med brødbrettet. Teleskoplinsene må fjernes på forhånd.
- Juster teleskopet.
- Bruk teleskopet til å redusere strålediameteren fra 40 mm til 15 mm for å passe inn i inngangen til PDK ( jf. Figur 4a, 4d ). Bruk en konveks linse på 200 mm og en 75 mm som henholdsvis første og andre linse. Bruk piloten og krysshårene til å plassere den første linseen ( se figur 4b ).
- Juster avstanden mellom begge linsene grovt ved hjelp av stållinjen. Bruk krysshårene igjenÅ plassere linsen til pilotlaseren. Monter det andre objektivet på en xy-oversetterstadium. Bruk scenen til å kollimere strålen.
- Juster stråleprøven.
- Hit (med laserstrålen) stråle sampler i en vinkel på 45 °. Bruk en andre skinne vinkelrett på den første til å plassere stråle sampler.
MERK: Det meste av den optiske effekten avkjøles av 500 W strømmåleren. Den optiske utgangen til diodelaseren er stabilere ved full effekt, og derfor er den optiske effekten delt opp. - Bruk irisene i et høydefestet innlegg for å sjekke den optiske banen langs skinnen ( jf. Figur 4a ) med pilotlaseren.
- Hit (med laserstrålen) stråle sampler i en vinkel på 45 °. Bruk en andre skinne vinkelrett på den første til å plassere stråle sampler.
- Juster speilet.
- Før du justerer speilet som vist på figur 4c , fjern PDK og baseplaten. Fest en tredje skinne vinkelrett på den andre. Igjen, sjekk den optiske banen med iris.
MERK: Den optiske banen sBør justeres til skinneretningen. Strålen skal kollimeres.
- Før du justerer speilet som vist på figur 4c , fjern PDK og baseplaten. Fest en tredje skinne vinkelrett på den andre. Igjen, sjekk den optiske banen med iris.
- Demonter og plasser PDK.
- Før du plasserer PDK 18 , fjern den originale lyskilden.
MERK: Det var to tidligere linser som opprinnelig kollimerer LEDene til PDK 19 ( jf. Figur 4d , inngang). De limes og må fjernes ved bruk av aceton. - Juster plattformen til PDK for å være parallell med den tredje skinnen og dermed til den optiske aksen til strålen. Bruk krysshårene justert til PDKs inngang for å plassere PDK i forhold til strålen. Hold justert parallelt. Slå av pilotlaseren, fordi den er for svak til å passere PDK.
- Før du plasserer PDK 18 , fjern den originale lyskilden.
- Projiser et hvitt bilde for å kontrollere den optiske effekten.
- Pass på at HDMI-kabel og USB-kabel på PDK samt datakjøpsavtalen (DAQ) -kortet er koblet tilKontroll PC. Koble portene til laserkontrollboksen for "laser lukker", "laser terskel" og "laser på" til DAQ-kortet. Koble "laserkontrollspenning" -porten til kontrollboksskanneren til DAQ-kortet.
- Start PDK-kontrollprogramvaren 20 og konfigurer den som en vanlig projektor som følger trinnene i.1 til i.3 i figur 5b . Aktiver den andre skjermen og sørg for at det ikke er noe vindu innenfor den andre skjermen. Bruk en hvit bakgrunnsbilde og kontroller funksjonen til projektoren med LED-blitslyset som inngangskilden.
MERK: Hvis et hvitt bilde projiseres til bildeplanet til PDK, virker enheten riktig.
- Kontroller optisk inngangseffekt.
- Sett 30 W strømmålerhodet festet til effektmålerens styreenhet i den optiske banen foran PDK ( se figur 4e - posisjon 1). Bytt diodlaserenPå med LPPT-laserstyringsprogramvaren som følger trinnene i.1 til i.3 i figur 5a ) ved et lavt strømnivå i trinn i.1 = 0,5 V.
MERK: LPPT-laserkontrollprogramvaren skifter DAQ-kortet som bytter laserkontrollutgangene ( se 1.7.1). Overvei lasersikkerhet, bruk briller og beskyttende klær! - Kontroller strømmålerens sensorposisjon med IR-sensorkortet med høy effekt. Hold IR-kortet inn i strålen og se det glø av. Match strålediameteren til effektmålerens sensorområde ( Figur 3 ).
- Kontroller maksimal optisk inngangseffekt ved inngangen til PDK (igjen følg figur 5a ), trinn i.1) med en verdi på 10 V.
MERK: Den optiske inngangseffekten ved inngangen til PDK skal være maksimalt rundt 22 W 21 . Ved denne konfigurasjonen ble målingstider opptil 5 minutter tolerert uten å ødelegge SLM, noe som er tilfelle hvis PDK ble realisert som en digital mikromirror-enhet (DMD). - Kontroller den optiske utgangseffekten.
- Plasser 30 W strømmålerhodet i en omtrentlig avstand på 60 mm til PDK ved hjelp av af = 60 mm objektiv festet til PDK-målet ( se figur 4e ).
- Plasser LED-blitslyset ved inngangen til projektoren ( se figur 4d ) og slå den på. Finjustere posisjonen til effektmålerhodet slik at det samler lyset av det projiserte bildet som vist i figur 4e . Fjern LED-blitslyset etterpå.
- Start LPPT-laserkontrollprogramvaren. Skriv inn '0,5 V' i feltet "spenning" og klikk på "Laser On!" knapp. Les den optiske effekten fra effektmålerens kontrollenhet. Stopp laseren ved å klikke på "Stopp" -knappen. Gjenta disse trinnene for 2 V, 6 V, 10 V ( se figur 5a , i.1 til i.3).
MERK: Hvis en spenning på 10 V gir en optisk utgangseffekt på &# 62; 4 W, den første testen er vellykket. Ellers må den optiske justeringen kontrolleres. Prøv å maksimere den optiske utgangseffekten ved å finjustere speilet.
- Mål stråleprofilen.
- Bruk en fotodiode med forsterker og tapphull for å måle bjelkeprofilen til det resulterende projiserte bildet ( se figur 4f ). Hvis en stråleprofil er tilgjengelig, bruk denne enheten, men svek strålen.
- Fest fotodioden til et oversettelsesstadium som er montert på en brakett. Fest også et nøytralt tetthet (ND) 1 reflekterende filter og 1 mm pinhull til dioden. Plasser fotodioden på toppen av en motorisert oversettelsestrinn og labkontakten. For å få høyde, bruk to brødbrett (100 mm x 100 mm).
- Bruk av = 100 mm objektiv etter PDK-målet ( se figur 4e ) og prosjekt et hvitt bilde ved hjelp av LED-blitslyset ( se trinn 1.7). Flytt fotodioden til bildeplanet ogKontroller at rekkevidden av fotodioden som beveger seg i oversettelsestrinn ligger innenfor det projiserte bildet ( se figur 4f ).
- Koble fotodioden til strømforsyningen og DAQ-kortet. Bruk 40 dB forsterkning for 6 V styrespenning for optisk laserkraft. Koble bevegelseskontrolleren til den motoriserte oversettelsestrinnet til kontroll PCen.
MERK: LPPT-intensitetsprogramvaren styrer bevegelsen til den pinholte fotodioden gjennom det opplyste området med en konstant hastighet på v = 0,1 mm / s og registrerer bildediodesignalet ved 100 kHz. Laseren styres også via programvare. - Bruk mikrometerskruen på scenen i trinn på 1 mm som vist på figur 4f for å skanne bildet. Se resultater vist i figur 6a-6b .
- Beregn korreksjonsbildet.
- For å korrigere inhomogeniteten til stråleprofilen, beregne en omvendt pikselmatrise angående strålenprofil. Identifiser rekkevidden av det projiserte bildet ved hjelp av en kantdeteksjonsalgoritme.
- Transform tidinformasjon til romlig informasjon ved hjelp av scenens hastighet. Transform den romlige informasjonen til pikseldomenet til PDK med x = 1,024 piksler og y = 768 piksler. Normaliser diodesignalet til maksimumsverdien.
MERK: Referansenivået for korreksjon ble valgt med gjennomsnittet av alle normaliserte bilderverdier. Dampnivået beregnes med:
P Pixel er normalisert diode intensitet per piksel. Verdiene av Pixel LC over 1 er satt til 1. - Multipliser korreksjonsmatrisen ( se figur 6c ) med et hvitt bilde og måle profilen igjen for å sjekke om korreksjonen var tilstrekkelig ( se figur 6e-6h ).
2. Klargjør prøven
- Sett 30 W strømmålerhodet festet til effektmålerens styreenhet i den optiske banen foran PDK ( se figur 4e - posisjon 1). Bytt diodlaserenPå med LPPT-laserstyringsprogramvaren som følger trinnene i.1 til i.3 i figur 5a ) ved et lavt strømnivå i trinn i.1 = 0,5 V.
- Bruk to blokker på 100 mm x 100 mm x 40 mm konstruksjonsstål St37 som prøvemateriale med en tetthet på ρ = 7 850 kg m -3 , termisk ledningsevne k = 54 W · m -1 · K -1 og varmekapasitet Av c p = 461 J · kg -1 · K -1 .
- Sett kunstige defekter i to blokker ved 0,25 mm, 0,5 mm, 0,7 mm, 1,25 mm og 1 mm, 1,5 mm, 1,75 mm, 2 mm ved elektrisk utladning under overflaten som vist på figur 7 .
- Tape feilene med beskyttelsestape. Sandblast toppflaten for å ha homogen absorpsjon. Tape defekter med beskyttende tape før belegging. Avfett overflaten ved hjelp av aceton.
- Coat det opplyste området med grafitt spray fra 30 mm avstand to ganger (0 ° og 90 °). Belegget lykkes hvis det er en homogen overflate. Hvis belegget ikke er intakt, start avfetting og rengjøring igjen og gjentaBeleggetrinnet. Tør overflaten ~ 2 timer. Ikke rør overflaten, det vil forandre utslipp.
- Fjern båndet og sørg for at grafitt ikke kommer inn i undergrunnsdefekten.

3. Forbered eksperimentet
- Klargjør PDK og diode laser.
- Prosjekt et hvitt bilde som beskrevet i trinn 1.7). Kontroller den optiske inngangseffekten til PDK som beskrevet i trinn 1.8). Kontroller den optiske utgangseffekten til PDK som vist i trinn 1.9).
- Koble 500 W strømmålerhodet til effektmålerens styreenhet og fest strømmåleren til kontrollcomputeren (PC) via en USB-kabel.
- Forbered bevegelseskontrolleren og plasser prøven.
- Koble bevegelseskontrolleren til oversetterstadiet og til styreenheten via en USB-kabel. Plasser oversettelsesfasen ortogonalt til den optiske aksen i en avstand på rundt 80 mm i forhold til PDK.
MERK: LPPT-programvarenE, kjører på kontrollcomputeren styrer bevegelseskontrolleren. - Fest f = 100 mm linse til PDK-målet. Bruk LED-blitslyset som inngangslyskilde ( se figur 4d , krysshårene markerer inngangen) til PDK for å finne projektorens bildeplan.
- Plasser et hvitt papirark i en omtrentlig avstand på 100 mm foran objektivet, og flytt det frem og tilbake for å finne flyet til det skarpe opplyste rektangelet, som er bildeplanet.
- Plasser den belagte prøveflaten på dette planet. Sett høyden på prøven ved hjelp av lab jack montert på lineær oversettelse trinn. Velg høyden slik at toppen av det opplyste rektangel treffer toppen av prøven ( se figur 4g ). Plasser feilen som ligger innenfor rekkevidden til det opplyste området.
- Nul bevegelsestyringen ved å slå enheten av og på igjen.
- Koble bevegelseskontrolleren til oversetterstadiet og til styreenheten via en USB-kabel. Plasser oversettelsesfasen ortogonalt til den optiske aksen i en avstand på rundt 80 mm i forhold til PDK.
- Klargjør kameraet og plasser gullspeilet.
- Bruk LED-blitslyset som inngangskilden for projektoren til å projisere et hvitt bilde til prøven.
- Plasser gullspeilet i en høyde slik at den ser øvre kant av prøven ( figur 4g ). Sett speilet i en vinkel på ca 35 ° som det er vist på figur 3 . Plasser gullspeilet så nært som mulig til PDK-målet, men ikke skygge projeksjonen.
MERK: Speilet er festet til et innlegg i en montert stolpe. Høyden og stillingen er festet av klemmer. - Monter IR-kameraet på stativet. Nivå IR-kameraet med Bullseye-nivået. Juster IR-kameraet til høyden på PDK-målet. Plasser den slik at den ser det projiserte hvite bildet over gullspeilet.
MERK: Den omtrentlige avstanden langs den optiske banen er rundt 1 m. - Bruk mellomromringen mellom IR-kameraets mål og IR-kameraet. GjøreKontroller at utløserinngangen på kameraet er koblet til måledatakjøpskortet for å utløse rammen. Koble også IR-kamerakontrollen til IR-kameraet via LAN-kabelen.
- Slå på kameraet og vent minst i oppvarmingstiden ( ca. 30 min).
- Start IR kamerakontroll programvare. Endre menylinjeelementet til "Kamera". Klikk på "Koble" -knappen for å koble til IR-kameraet ( se figur 8a , trinn i.1).
MERK: Kameraet viser et levende bilde av scenen. - Klikk på "Fjern" -knappen for å åpne panelet "Fjernkontroll" ( se figur 8d , trinn i.2). Velg kalibrering "HF 100mm (-10 ° C - 60 ° C) 1140 μs". Se figur 8d , trinn i.2.1.
MERK: Kalibreringsområdet skal være så lite som mulig for å redusere støy. - Juster objektivfokusringen manuelt for å fokusere IR-kameraet til denE prøveplan.
MERK: Det er viktig at kameraets synsfelt er like stort som det maksimale projiserte området for å få maksimal romlig oppløsning ( jf. Figur 4g ). Man må kanskje endre posisjon, høyde og orientering av IR-kameraet. For å bestemme om et bilde er skarpt, trenger man en temperaturkontrast på bildeplanet. En stållinje kan brukes til å generere en kontrast. Hvis IR-bildet fortsatt har lav kontrast, kan det justeres ved hjelp av valgverktøyet ( se figur 8c , i.3) - Utfør en ikke-ensartet korreksjon ved å klikke på knappen "NUC" ( se figur 8d , trinn i.2.2). Dekk IR-kameraets mål og klikk på "OK".
- Bestem forholdet mellom IR-kameraets pixel-domene og projektorkoordinater.
- Bestem forholdet mellom PDK piksel domene, IR kamera piksel domene og leNgth skala av prøven ved å projisere et hvitt bilde eller mønster til prøveoverflaten ( se figur 4g, h ). Mål det projiserte området ved å bruke en stållinje som gir forholdet mellom PDK-domenet og lengden av prøven.
- Bruk f = 100 mm objektiv festet til PDK-objektivet for å få et opplyst område på 21,3 mm x 16 mm (4: 3).
MERK: Lengdeskalaen i PDK-koordinatene er: 1 projisert piksel = 21,3 mm / 1,024 piksel - Finn forholdet mellom PDK og IR kamera. Gjenta trinn 1.9.3) for 10 V.
- Bruk IR-kameraprogramvaren til å endre menylinjen til "Mål". Velg "Kryssverktøy" fra verktøylinjen "Målområder" ( se figur 8c ), trinn i.4). Merk hjørnene til det resulterende termiske bildet ved å venstre klikke på rammen som vises.
- Høyreklikk på krysset for å komme til eiendomsvinduet. Bytt til "koordinater" og registrer dem forSenere transformasjon av det termiske bildet til PDK-koordinatsystemet.
4. Gjennomfør eksperimentet
- Forbered eksperimentet.
- Estimatbelysningsareal i forhold til lengden av prøven.
- Bruk f = 100 mm linse for å oppnå et opplyst område på 5,5 mm x 16 mm per mønster. Velg et område på 5,5 mm x 16,5 mm mellom dem som ikke er opplyst.
MERK: Den resulterende bestrålingen er ca. 1,2 W / cm².
- Bruk f = 100 mm linse for å oppnå et opplyst område på 5,5 mm x 16 mm per mønster. Velg et område på 5,5 mm x 16,5 mm mellom dem som ikke er opplyst.
- Estimatbelysningsareal i enheter i forhold til PDK-pikseldomenet.
- Transform den opplyste mønsterposisjonen til PDKs pikseldomene (1.024 piksler x 768 piksler) ved hjelp av ligningen i trinn 3.4.2). Bruk [(512, 1); (512, 768)] piksler i PDK-domenet som uttømningslinjen, som er symmetrisk mellom begge mønstrene.
- Beregn totalt antall rammer, målingstid og rammer peR periode. Forutsatt en hastighet på v = 0,05 mm / s, beregner en trinnreiseavstand på x = 10 mm og en PDK-rammehastighet ƒ r = 40 Hz, beregningstiden t via t = x / v = 200 s. Også beregne antall rammer nei ƒ = ƒ r • t = 8 000. Med en eksitasjonsfrekvens på ƒ = 0.125 Hz, beregne rammene per periode p med p = nei ƒ / t ƒ = 320 rammer / periode.
Merk: Disse verdiene vil bli brukt til å generere de projiserte bildene. - Kontroller oppsettet og kontroller at lasersystemet, IR-kameraet og (valgfritt) temperaturkontrollen er koblet til DAQ-kortet. Sjekk om 500 W strømmåler, PDK og lineær trinn er koblet til kontroll PC.
- Estimatbelysningsareal i forhold til lengden av prøven.
- Sett opp kamerakontroll-PCen.
- Konfigurer IR-kamerakontrollprogramvaren for å ta tak i en ramme når IR-kameraet mottar en triggerinngang. For dette sHeks til panelet "Kamera" og klikk på "Fjern" -knappen ( se figur 8a , trinn i.2) for å åpne fjernkontrollpanelet. Velg "Process IO" fra rullegardinmenyen ( Figur 8d , trinn i.2.3) og aktiver "Synkroniser inn" og "Gate" og lukk menyen.
- Åpne oppkjøpsmenyen ved å klikke nederst til høyre på "Oppkjøpsparametere" -fanen ( se figur 8a , i.5). Velg "Ext / Sync" fra rullegardinmenyen ( se figur 8b , i.5.1). Oppgi målingen ved å skrive inn fil- og mappens navn i "Mapp" -feltet (se figur 8b , i.5.2).
- Skriv inn det totale rammenummeret beregnet fra trinn 4.1.3 i feltet "count" ( se i.5.3). Lukk oppkjøpsmenyen og klikk på "Record" -knappen for å starte IR-kameraoppsamlingen ( se figur 8 , i.6).
MERK:Opptaket vil bare skje hvis det er en utløserinngang fra DAQ-kortet.
- Utfør eksperimentet.
- Start LPPT-kontrollprogramvaren. Aktiver bevegelsestyringen ved å klikke på "Aktiver?" Knappen ( figur 9a , i.1). Sett reiseparametrene "StartPosition" = "-5 mm", "EndPosition" = "5 mm" og "Velocity" = "0.05 mm / s" ved å redigere de tilsvarende navngitte feltene som vist i Figur 9a , i.1. Klikk på "Start måling" -knappen (se figur 9a , i.2).
MERK: Hvis det er uklart hvor feilen er plassert, velg en større kjøreavstand med høyere hastighet. Vær oppmerksom på temperaturøkningen i PDK, og mengden data som er opprettet. Merk at et brukergrensesnitt for å generere rammebildene vil vises ( se figur 9b ). - Generer de projiserte rammebildene. <ol>
- Venstre klikk på feltet "Velg områdefarge". Velg en farge for mønsterområdet fra fargedialogen ( figur 9 , i.3). Velg "rektangelverktøyet" fra tegneverktøylinjen øverst til venstre.
- Tegn et rektangel på bildeområdet ved å venstre klikke og holde mens du strekker seg over bildeområdet. Bruk de transformerte mønsterkoordinatene fra trinn 4.1.2) til å få rektangelkoordinatene vist i venstre nederste hjørne (i.4). Klikk på "Definer område" -knappen ( figur 9b , i.5).
MERK: De beregnede pikselkoordinatene i PDK-domenet for 5,5 mm mønsterstørrelse er: Rektangel 1 (x1 = 116, y1 = 1; x2 = 380, y2 = 768), rektangel 2 (x1 = 644, y1 = 1; x2 = 908, y2 = 768). Etter å ha klikket på knappen "Definer område", vises en dialog for å angi mønsteregenskapene.
- Start LPPT-kontrollprogramvaren. Aktiver bevegelsestyringen ved å klikke på "Aktiver?" Knappen ( figur 9a , i.1). Sett reiseparametrene "StartPosition" = "-5 mm", "EndPosition" = "5 mm" og "Velocity" = "0.05 mm / s" ved å redigere de tilsvarende navngitte feltene som vist i Figur 9a , i.1. Klikk på "Start måling" -knappen (se figur 9a , i.2).
- Angi mønsteregenskapene ( figur 9c , i.6).
- Velg "sinusbølge" fraRullegardinmeny ved å klikke på feltet "Signaltype". Definer oscillasjonsparametrene ved å sette feltene "Phase Shift" til "0 °", "Frekvens" til "0.125 Hz" og "Amplitude" til "127" (faseskift på 0 for det første mønsteret og en faseskift av π for den andre).
- Still laserspenningen til 10 V ved å sette "10" til feltet "Spenning". Lim inn 320 til feltet "Pics / period" ved å bruke verdien fra trinn 4.1.3). Trykk på "Neste" -knappen; Dette lukker panelet.
MERK: LPPT-kontrollprogramvaren beregner en periodisk bildestrøm ved oppløsning av PDK. Som en hvit piksel betyr maksimal optisk kraft og en svart piksel null kraft, beregnes to oscillerende mønstre. Gråverdien til det første mønsteret beregnes med P1 = 127 sin (2π 0.125 Hz t ) + 127 og den for den andre med P2 = 127 sin (2π 0.125 Hz t+ Π) + 127 (se figur 2 , graf), mens tiden t er diskretisert til den valgte rammeprisen ( se trinn 4.3.4).
- Lag det andre projiserte mønsteret.
- Gjenta trinn 4.3.2) og 4.3.3) etter arbeidsflyten i Figur 9, men med en annen farge og en annen "Faseskift" på "180 °". Klikk på kalkrammer-knappen for å beregne de projiserte mønstrene. Still inn rammen for PDK og IR-kameraet til å være "40 Hz" i dialogboksen dukker opp.
- Legg inn korreksjonsbildet.
- Følg arbeidsflyten i figur 9b ), trinn i.12. Velg "load correction" panelet, og gi filen for det beregnede bildet fra trinn 1.11). Legg inn korreksjonsbildet ved å klikke på knappen.
- Start målingen ved å klikke på "Start" -knappen ( se figur 9b , trinn i.13).
MERK: Beregnede rammer blir projisert på prøven mens scenen beveger seg. Rammene vil bli kjøpt og talt med IR-kamerakontrollprogramvaren. - Stopp målingen når alle rammer er anskaffet (fremdriftslinje = 100%) ved å klikke på "Stop Measurement" -knappen ( se figur 9a , i.14).
MERK: Etiketten på knappen vil endres hvis den klikkes.
5. Etterbehandle datafilen
- Start LPPT etterbehandlingsprogramvare. Klikk på "last" -knappen og velg målfilen i fildialogen. Klikk "OK" for å forvandle kameraformatformatet til dataprogrammet etter behandling ( se figur 10a ).
MERK: IR-kameradataene lagres på IR-kameraets PC i et opprinnelig format. IR-kameraets styringsprogramvareutviklingssett brukes til å konvertere IR-kamerasekvensen til en tredimensjonal matrise (piksel X, piksel Y, rammenummer) og enHeader inkludert en tidsvektor vektor t. - Transform IR-kameradataene til PDK-domenet ( se figur 10b ) ved å sette inn koordinatene til de fire projeksjonspunktene P1x til P4y fra trinn 3.4.3) og klikk på "Transform".
MERK: På grunn av bildeprojeksjonen via gullspeilet til IR-kameraet ( se figur 4g ), blir det resulterende IR-bildet forvrengt. En affine geometrisk transformasjon utføres fra IR kamera domenet til PDK domenet. Resultatet er en matrise av størrelse 1,024 x 768 x rammenummer. - Trekk ut temperaturinformasjonen på avløpsledningen ( se figur 10c ).
- Definer uttømningslinjen med to punkter L1 og L2 ved å fylle feltene L1x = Lx2 = "512" piksel som den allerede ble valgt i trinn 4.1.2). Velg y fra L1y = "343" til L2y = "393". Se figur 10c .
MERK: På grunn av transformasjonen i trinn 5.2), kan dataene væreHentes med en gang, men bivirkninger oppstår fordi prøven bare er delvis opplyst. Derfor må du ikke vurdere kanten av mønstrene. Hvis støyen fortsatt er for høy, kan størrelsen på y økes. - Angi eksperimentelle parametere for IR-kameraet ved å fylle ut følgende felt: FrameRate som "40" Hz, frekvens som "0.125" Hz, hastighet v som "0.05" mm / s og startposisjon xStart som "-5" mm ( jfr. Figur 10c ). Still parametrene for data etterbehandling: "Fit Degree" = "7", "Smoothing" = "20" og "Hilbert" = "500" som i Figur 10c .
MERK: Dataene som utvinnes ved utløpslinjen er geometriske i gjennomsnitt. Etterpå hentes vekslende temperatur termen Δ T (se Figur 11a, b ) ved å utføre en polynomisk passform (Fit Degree). Det resulterende signalet glattes av et glidende gjennomsnittsfilter (utjevning).Endelig påføres en Hilbert-transformasjon for å hente den øyeblikkelige amplituden. Et annet glidende gjennomsnittsfilter (Hilbert) påføres for å redusere resterende krusninger. Ved å bruke informasjon om amplitudeminimum, oppnås posisjonen til den skjulte defekten. - Klikk på "Evaluer" for å utføre data analysen. Les den beregnede posisjonen til defekten fra feltet "CrackPosition [mm]". Feilposisjonen vises i vinduet i Figur 10d .
- Definer uttømningslinjen med to punkter L1 og L2 ved å fylle feltene L1x = Lx2 = "512" piksel som den allerede ble valgt i trinn 4.1.2). Velg y fra L1y = "343" til L2y = "393". Se figur 10c .

Figur 3: Fotografi av eksperimentell oppsett med markert optisk bane (rød linje). Laserfiberfestet er festet til fiberen til diodlaseren. Strålen er justert av teleskopet til inngangsdiameteren til PDK. Før du går inn i PDK, er strålen delt av stråleprøven og overvåket av effektmåleren. Inne i PDK blir strålen homogenisert aNd projisert til en DMD. PDM, styrt av LPPT-kontrollprogramvaren, projiserer belysningsmønstre til prøven. Det projiserte lyset er fototermisk omdannet og oppvarmer prøven. Temperaturen måles av et IR-kamera via den termiske strålingen (oransje linje) som sendes ut fra prøveflaten. Selve prøven er plassert på den lineære oversettelsestrinn. Vennligst klikk her for å se en større versjon av denne figuren.

Figur 4: Fotosekvens som viser justeringen av eksperimentoppsettet. ( A ) På toppen av eksperimentoppsettet vises en oversikt. ( B ) Justering av teleskopet: Krysshårene brukes til å sentrere linsen til laserstrålens optiske akse. ( C ) Justere de optiske elementene: Et stangsystem mounteD til den optiske benken brukes til å justere den optiske strålen i forhold til benken. En høydefast iris brukes til å holde strålen parallell med benken. ( D ) Bilde av sidevisningen til koblingspunktet mellom projektor og stråle. Korshårene brukes til å justere projektoren til strålen. ( E ) Bestemme overføringen av prosjektorsystemet: Strømmåleren brukes til å måle den optiske effekten før og etter projektoren. ( F ) Bestemmelse av bjelkeprofilen: Pinhole og ND1 filter er montert på dioden som beveges via to lineære trinn gjennom det projiserte bildet. Projektoren må konfigureres for å projisere et hvitt bilde. ( G ) Plassering av det infrarøde kameraet til prøven via et gullspeilet: Prøven må plasseres i projektorens bildeplan. For å kontrollere effektdensiteten kan objektivet og tilleggslinsene knyttet til målet brukes. ( H ) BestemmelseAv skalaen mellom projisert bilde, IR kamera bilde og den faktiske lengden av prøven. Vennligst klikk her for å se en større versjon av denne figuren.

Figur 5: Skjermbilder av programvare. ( A ) Skjermbilde av LPPT laserstyringsprogramvare. ( B ) PDK-kontrollprogramvare: Trinnene i.1 til i.3 viser hvordan du konfigurerer PDK som en vanlig projektor. Vennligst klikk her for å se en større versjon av denne figuren.

Figur 6: Korrigering av den inhomogene stråleprofilen. ( A ) Beamprofil for det projiserte hvite bildet (full belysning) tatt av a Fotodiode som ble flyttet gjennom profilen. Dataene viser en inhomogen stråleprofil med en fremtredende topp i midten. ( B ) Tverrsnittslinjeprofilen som svarer til den røde linjen i a). ( C ) Korrigeringsbilde som overlaid på SLM med det projiserte hvite bildet for å redusere nivået av inhomogenitet. ( D ) Tilsvarende tverrsnittslinjeprofil av den røde linjen i c). ( E ) Resulterende stråleprofil etter korreksjon som viser en profil nærmere en topphattprofil. ( F ) Tilsvarende tverrsnitt linjeprofil av den røde linjen i e). ( G ) Belysningsprofil av to korrigerte mønstre. Mønstrene vil bli modulert med samme frekvens og amplitude, men med motstridende faser som skaper en zone med destruktive forstyrrelser mellom mønstrene. ( H ) Tilsvarende tverrsnittslinjeprofil av den røde linjen i g). Ve.com/files/ftp_upload/55733/55733fig6large.jpg "target =" _ blank "> Vennligst klikk her for å se en større versjon av denne figuren.

Figur 7: Prøveforberedelse. ( A ) Fotografi av prøveoverflaten som viser en blokk med svart belagt stål St37 (20 mm x 0,5 mm x 15 mm). ( B ) Transparent CAD tegning av undergrunnsdefektene. Manglene er plassert 40 mm fra høyre side. ( C ) Sett fra sidebilder av prøvene som viser idealiserte defekter på forskjellige dybder under overflaten (side 1 = 0,25 mm, side 2 = 0,5 mm, side 3 = 0,7 mm, side 4 = 1,25 mm). Prøvesidene er ikke belagt for å redusere varmetap. Den andre prøven (ikke vist) har undergrunnsdefekter på: side 1 = 1 mm, side 2 = 1,5 mm, side 3 = 1,75 mm, side 4 = 2 mm.= "_ Blank"> Vennligst klikk her for å se en større versjon av denne figuren.

Figur 8: Skjermbilder av IR-kamerakontrollprogramvaren. Trinnene i.1 til i.5 viser hvordan du konfigurerer IR-kameraet for datainnsamling. ( A ) Skjermbilde av "Kamera" -panel: IR-kameraet kan kobles til IR-kamerakontroll PC via "Koble" -knappen. Kontrollpanelet "Remote" (b) og oppkjøpspanelet (d & e) kan nås herfra. Videre kan målingen startes via "Record" -knappen. ( B ) Skjermbilde av "Oppkjøp" -panelet: IR-kameraet må konfigureres via "Ext / Sync" for å ta opp en ramme hvis den mottar en 5 V TTL-utløser. ( C ) Skjermbilde av "Mål" -panel: Datautvisningsområdet kan justeres med "Valg" -knappen. Punkt- og linjeverktøyBrukes til å kalibrere IR kamera bildet til ekte verdens koordinater. ( D ) Skjermbilde av IR kamera fjernkontroll "Kalibreringer" panel. Et lite måleområde (-10 til 60 ° C) må velges for å oppnå høy følsomhet. ( E ) IR-kameraets fjernkontrollpanel: "Process-IO", "IN1" og "IN2" må aktiveres for å utløse IR-kameraet. Vennligst klikk her for å se en større versjon av denne figuren.

Figur 9: Skjermbilder av LPPT-kontrollprogramvaren. Arbeidsflyten for brukerinteraksjoner med programvaren er merket med som trinn i.1 til i.14. ( A ) Skjermbilde av LPPT hovedpanelet; "Aktivert?" Er en boolsk type og aktiverer scenen hvis den er sann. "Start-" og "EndPosiFeltet "Velocity" er definert i mm / s. "Startmåling" -knappen starter målingene, åpner dialogboksen som vises i panelet (b) og stopper målingen hvis den er feil. ( B ) Skjermbilde av brukergrensesnittet som brukes til å lage mønstrene projisert til prøven. En farge er valgt for å representere et område av piksler. Området velges ved å tegne rektangler til bildet. Hvis knappen "definer område" trykkes, Panelet som vises i panelet (c) vil dukke opp for å definere egenskapene til området. Etter å ha definert alle områder, vil knappen "calc Frames" beregne et sett med bilder. "Load Correction" vil gi en dialogboks for å laste inn korreksjonen Bildet for å unngå en inhomogen stråleprofil. Knappen "Start" vil starte målingen. ( C ) Skjermbilde av brukergrensesnittet som brukes til å angi egenskapene til ett mønster. Den øvre rammen viser signaltype (sinusbølge), faseskiftI grader og frekvens i Hz. Den nederste rammen viser rammer per periode, amplitude fra 1 til 127 og laserspenning (0 V til 10 V = 0 W til 500 W). Rammer per periode er verdien som representerer hvor fin en periode er diskretisert. Etter at knappen "Next" (videre) er trykket, kommer en dialogboks opp og ber om kamerarammerfrekvens i Hz og rammebrytelseshastighet i Hz. Vennligst klikk her for å se en større versjon av denne figuren.

Figur 10: Skjermbilder av LPPT etterbehandlingsprogramvare. ( A ) Last inn og transformer det infrarøde IR-kameraformatet. ( B ) Transform rammatrisen til projektorens koordinatsystem ved å bruke transformasjonspunktene P1x til P4y. ( C ) L1x til L2y representerer pikselkoordinatene til den evaluerte linjen. &# 34; v "," xStart "," FrameRate "og" Frequency "er eksperimentelle parametere." V "er hastigheten i mm / s," xStart "startposisjonen i scenen i mm," FrameRate "og" Frequency "Fit Degree" representerer graden av polynomisk passform, "Smoothing" representerer antall elementer for et glidende gjennomsnittlig filter som brukes til å redusere støy og forbrenning. "Hilbert" -parameteren brukes til å angi nivået av utjevning for å finne minimum av kurven. ( D ) Skjermbilde av resultatet som viser sprekkposisjonen som en vertikal stiplede linje. Vennligst klikk her for å se en større versjon av denne figuren.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Etter protokollen ble side 1 av stålprøven med en undergrunnsdefekt i en dybde på 0,25 mm valgt for å generere representative resultater. Defekten ble opprinnelig plassert omtrent i midten av det opplyste området. Prøven ble deretter flyttet fra -5 mm til 5 mm via det lineære trinn med en hastighet på 0,05 mm / s. Ved å bruke disse parametrene viser figur 11a skanningsdataene etter at de har blitt ekstrahert fra uttømningslinjen. På dette stadiet kan eksperimentets suksess estimeres, da rådataene er tilgjengelige fra IR-kamerakontrollprogramvaren som forhåndsvisning (valgfritt: Bruk linjeværktøyet til å forhåndsvise dataene, se figur 8 , trinn i.4) . Etter ytterligere signal etterbehandling viser figur 11b defektposisjonen i det minste av Hilbert-kurven (blå) ved 0,3 mm.
For å validere eksperimentet, bør kurven hAve følgende egenskaper: den skal være symmetrisk, ha et uttalt minimum ved symmetriplanet og to like maksima til venstre og høyre. Maksima oppstår fordi varmestrømmen fra en av ledningskildene dominerer over den andre på grunn av opphopning av varme ved defekten. Dette er spesielt tilfellet når defekten er plassert nær symmetriplanet. Feilen danner en barriere for varmestrømmen, slik at vi kan observere varmestrømmen til den dominerende kilden og dens refleksjon fra feilen. Hvis defekten er plassert symmetrisk i midten, splittes varmen i likhet, noe som resulterer i minst 1 .
Effekten av skannehastigheten er vist i figur 11c . Her ble skannehastigheten doblet til 0,1 mm / s for å evaluere den samme feilen. På forhånd ble prøven skiftet litt på scenen for å oppnå en annen relativ posisjon. Defektposisjonen ble bestemtÅ være -2 mm. Forlengningsnivået ligner dataene vist i figur 11a , hvilket viser god reproduserbarhet av forsøket, men med færre svingninger. Siden maksimal forlengelse korrelerer med dybden på defekten, kan informasjon om posisjon og dybde også opprettholdes 1 .
Figur 11d viser et suboptimal datasett. Defekten var 1 mm under overflaten, som er nesten ved gjenkjenningsgrensen for denne diffusjonslengden og den tilgjengelige optiske effekten. Selv om plasseringen av defekten fortsatt kan bestemmes, er måleusikkerheten større fordi plasseringen av null-svingningen allerede er påvirket av støy. Fra denne oppførselen kan vi konkludere at de mest åpenbare tegn på feil i deteksjonseksperimentet er hvis uttømningslinjen forsvinner helt eller hvis det er sterk asymmetrisk oppførsel. Dette kan skyldes folloVinkelsaker: (i) IR-kameraets romlige oppløsning er ikke tilstrekkelig, og uttømningslinjen kan ikke løses ordentlig, (ii) støyen i kameraet er for høy i forhold til temperaturstigningen, (iii) belysningsmønsteret er Inhomogen og ikke korrigert riktig, iv) den valgte scenhastigheten er for høy i forhold til modulasjonsfrekvensen til belysningsmønsteret, og (v) termisk diffusjonslengden (via modulasjonsfrekvensen) ikke er tilpasset defekten dybde.

Figur 11: Representativt datasett fra eksperimenter for å finne undergrunnsdefekter. ( A ) Representative eksperimentelle data fra St37-prøven, side 1 med en defekt på en dybde på 0,25 mm. Den svarte linjen viser temperaturinformasjon over tid (toppakse). Ved å oversette scenen med en hastighet v = 0,05 mm / s er stillingenHentet (bunnakse). Den røde kurven viser en polynomisk passform (7 grader) som brukes til å oppnå vekslende temperaturkomponent. Den stiplede røde linjen representerer posisjonen til undergrunnsdefekten. ( B ) Den svarte kurven viser den alternerende temperaturgrafen oppnådd ved å subtrahere polynomisk passform fra temperaturdataene til panelet (a). Den blå kurven ble oppnådd ved å anvende Hilbert-transformasjon til den svarte kurven og gjennomsnittlig. ( C ) Representative eksperimentelle data på samme side over et område på -7 mm til 3 mm ved en trinnhastighet på 0,1 mm / s. Frekvensen er halvert, men forlengelsen er lik panelet (a). ( D ) Suboptimal eksperimentell data oppnådd når undergrunnsdefekten var i en dybde på 1 mm. Vennligst klikk her for å se en større versjon av denne figuren.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Den presenterte protokollen beskriver hvordan man finner kunstige undergrunnsdefekter orientert vinkelrett på overflaten. Hovedidéen til metoden er å skape forstyrrende termiske bølgefelt som interagerer med undergrunnsdefekten. De viktigste trinnene er (i) å kombinere en SLM med en diodelaser for å skape to alternerende høyeffektbelysningsmønstre på prøveoverflaten; Disse mønstrene blir fototermisk omdannet til koherente termiske bølgebelter, (ii) å la dem ødelegge seg interferert med en undergrunnsdefekt, og (iii) å lokalisere disse defektene fra en overflateskanning av den dynamiske temperaturen på prøveoverflaten ved hjelp av en termisk bildebehandling IR kamera. Siden kun relativ oscillasjon av temperaturen rundt en sakte varierende middelverdi og ikke absolutt temperaturverdien er nødvendig, er denne tilnærmingen ekstremt følsom overfor skjulte mangler 1 .
En av de mest kritiske trinneneInnenfor protokollen er å etablere tilstrekkelig homogenitet av belysningsstråleprofilen ved bruk av en SLM-koblet laserkilde for strukturert oppvarming (se trinn 1.10). Diodelaseren gir en høy bestråling, men må mates inn i projektoren som inneholder SLM med riktig strålediameter og retningsstyrke. På grunn av små uunngåelige geometriske og spektrale feilmatcher med den proprietære optiske banen i prosjektøren, blir det genererte bildet på prøven forvrengt. Derfor utføres en numerisk korreksjon av bildens intensitetsverdier som styrer det projiserte bildet, med en referansestråleprofilmåling. Et annet kritisk trinn for et vellykket eksperiment er å oppnå en høy romlig oppløsning av IR-bildet (se trinn 3.3.7-3.3.8). Avløpssonen må være tilstrekkelig romlig oppløst, ellers ingen utmattelse og derfor kan ingen feilposisjon måles.
Naturen til de anvendte termiske bølgene er en diffusjonsaktigProsess som fører til en sterk demping av deres amplitude over noen få millimeter. Vi møter denne inneboende fysiske begrensningen ved å bruke en høy-effektdiode laser som lyskilde. Flaskhalsen i dagens eksperimentelle oppsett er termisk spenningsgrense for SLM 21 , noe som betyr at bare en brøkdel av den tilgjengelige laserkraften kan påføres. Vår nåværende løsning er å belegge prøveoverflaten med et svart grafittbelegg. I fremtiden forventer vi oppsett med høyere følsomhet ved hjelp av optimaliserte lysmotorer eller til og med byttebare direkte laserarrayer, for eksempel høy-power vertikale hulroms overflate-emitterende laser (VCSEL) arrays 22 .
Hovedforskjellen mellom denne metoden og eksisterende termisk bildebehandling i ikke-destruktiv testing er det faktum at vi bruker destruktive forstyrrelser av fullt sammenhengende termiske bølgefelt; Som kun er mulig etter å ha kontroll over amplitude og fase av et sett av individuelle liGht kilder på en deterministisk måte. Innenfor eksisterende termografiske metoder benyttes enten en plan lyskilde, styrt i tidsdomene, eller en enkelt fokusert laserpunkt, styrt i det romlige domenet. Den største fordelen med vår tilnærming er høy følsomhet for defekter som ligger vinkelrett på prøveoverflaten.
Så langt har bare to individuelle lyskilder blitt opprettet. Med den laserkoblede SLM kan vi i prinsippet generere og kontrollere opptil en million individuelle lyskilder - en million varmekilder - på prøveoverflaten. Klart denne tilnærmingen åpner opp mulighetene for vilkårlig termisk bølgeforming på lang sikt og overfører teknikker fra ultralyd eller radar til feltet for aktiv termografi, innenfor fysiske grenser. Når irradiansutfordringen som angitt ovenfor ( dvs. optisk effekt per projisert piksel) er tilfredsstillende løst, bør enda mindre defekter som ligger dypere under overflaten bli detekterbare. Så langt,Stål har blitt testet, men metoden er svært lovende spesielt for plast, sammensatt materiale og andre sensitive materialer, på grunn av lavt termisk stress påført.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Forfatterne har ingenting å avsløre.
Acknowledgments
Vi vil gjerne takke Taarna Studemund og Hagen Wendler for å ta bilder av eksperimentell oppsett, samt forberede dem til figurutgivelse. Videre vil vi gjerne takke Anne Hildebrandt for prøvepreparasjonen og Sreedhar Unnikrishnakurup, Alexander Battig og Felix Fritzsche for korrekturlesing.
Materials
| Name | Company | Catalog Number | Comments |
| 500 W diode laser system, 940 nm | Laserline | LDM 500 - 20 | Pilot laser class 2 @ 650 nm, diode laser is a class 4 laser system --> special laboratory needed |
| Laser control box | Laserline | Laser control box LDM | Add on to the laser system, used to switch electronically, laser threshold, shutter, laser on 0 V..5 V TTL |
| Control box scanner | Laserline | Add on to the laser system, used to adjust the optical output power via analog signal from 0 V..10 V | |
| Fiber Laser Mount 2", f = 80 mm | Laserline | Add on to the laser system | |
| Multifunction Data Aquisition (DAQ) Device + BNC Terminal | National Instruments | NI-USB 6251 | The DAQ card is used to trigger the IR camera, the DLP Light Commander 5500, control Laser and diode PDA 36A |
| Standard - PC | Control PC - graphic card for two screens, at least 4 x USB, Windows based | ||
| BNC cabel | Standard cable | ||
| HDMI cable | Standard cable | ||
| Micro USB to USB cable | Standard cable | ||
| LabVIEW 2013 SP1 Development System | National Instruments | Development environment for device control | |
| LPPT control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT intensity software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT laser control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| Matlab 2016b | MathWorks | Postprocessing of the measurement data | |
| LPPT postprocessing software | BAM | Postprocessing of the measurement data | |
| IR camera control PC | InfraTec | Control PC is supplied by camera distributor | |
| IR camera control software | InfraTec | Irbis 3 Professional | |
| InfraTec SDK | InfraTec | Dynamic Link Library as interface between the native data aquisition format of Infratec and Matlab | |
| IR camera | InfraTec | Image IR 8300 | 640 x 512, cooled InSb detector, wavelength 2 µm..5.7 µm, noise = 20 mK + accessories (LAN cable, Digital in/out cable, space ring, power supply, case) |
| Tripod | Manfrotto | 161MK2B | |
| IR camera mount | Manfrotto | 405 | |
| Projector development kit (PDK) for digital light processing (DLP) technology (DLP Light Commander 5500) | Logic PD | DLP-LC-DLP5500-10R | DLP5500 Digital Micromirror Device from Texas Instruments included , light engine and case need to be disassembed |
| PDK control software | Logic PD | Included when delivered, DLP Light Commander control software | |
| Mechanical platform for the PDK | BAM | Self made (140 x 230 x 420) mm3 | |
| Power meter control unit | Ophir | Vega | USB Interface |
| 30 W power meter head | Ophir | 30(150)A-LP1-18 | Power meter head to determine Transmission of the projector system |
| 500 W power meter head | Ophir | FL500A | Power meter for process supervision |
| Motion controller | Newport | ESP301 | with USB Interface |
| Translation stage | Newport | M-ILS200CC | Connected to ESP301 |
| Photodiode with amplifier | Thorlabs | PDA 36A-EC | 1" mount |
| Reflective filter ND1 | Thorlabs | ND10A | to be mounted to the PDA 36A |
| Pinhole 1" | Thorlabs | P1000S | to be mounted to the PDA 36A |
| Optical aluminium breadboard | Thorlabs | MB60120/M | (1,200 mm x 900 mm) base |
| Plano Convex Lens f = 200 mm | Thorlabs | LA1979-B | Coated for IR, first telescope lens |
| Plano Convex Lens f = 75 mm | Thorlabs | LA1145-B | Coated for IR, second telescope lens |
| xy-translation stage | Newport | M401 | Used for adjusting the telecope |
| Beamsampler | Thorlabs | BSF20-B | Splits the optical output, used to reduce the optical input for the projector system |
| Mirror | Thorlabs | BB2-E03 | Mirror for coupling the beam to the DLP Light Commander |
| Heavy duty lab jack | Thorlabs | L490 | Used for the fiber mount and on top of the linear stage to position the sample (2x) |
| PDK-objective | Nikon | Nikon AF Nikkor 50 mm 1:1:8:D | Objective for DLP Light Commander, 50 mm |
| Plano Convex Lens f = 100 mm | Thorlabs | LA1050 -B | Lens is attached to the Nikon Objective |
| Bi-Convex Lens f = 60 mm | Thorlabs | LB1723 -B | Lens to be attached to the Nikon objective in order to determine the optical transmission with the 30 W measurement head |
| Square protected gold mirror | Thorlabs | PFSQ20-03-M01 | |
| High power IR sensor card | Newport | F-IRC-HP-M | Sensor card to check the optical pathway |
| 2" crosshairs | BAM | Self-made | |
| 1" crosshairs | BAM | Self-made | |
| Bullseye level | Thorlabs | LCL01 | |
| Translation Stage | Newport | M-UMR8.25 | Used for measuring the beam profile |
| Micrometer screw | Newport | DM17-25 | Used with translation stage M-UMR8.25 |
| Mounted Zero Aperture Iris | Thorlabs | ID75Z/M | used to check the optical pathway |
| Bases and Post Holders Essentials Kit, Metric and Universal Components | Thorlabs | ESK01/M | Basis |
| Posts & Accessories Essentials Kit, Metric and Universal Components | Thorlabs | ESK03/M | |
| M6 Cap Screw and Hardware Kit | Thorlabs | HW-KIT2/M | |
| Construction Rails | Thorlabs | XE25L700/M | |
| 1" Construction Cube | Thorlabs | RM1G | Used to mount construction rails |
| Electrical discharge machining | Sodick | AG60L | www.sodick.de |
| St37 block of steel (100 x 100 x 40) mm3 |
BAM | self-made, hidden defect with remaining wall thicknesses of 0.25 mm, 0.5 mm, 0.70 mm, 1.25 mm (shown in Figure 5) | |
| St37 block of steel (100 x 100 x 40) mm |
BAM | self-made, hidden defect with remaining wall thicknesses of 1 mm, 1.5 mm, 1.75 mm, 2 mm (shown in Figure 5) | |
| Graphite spray | CRC Industries Europe NV | GRAPHIT 33 | Ref. 20760, 200 mL aerosol (Kontakt-Chemie) |
| Protective tape | Tesa | tesakrepp 4348 | used to protect the hidden defects while coating |
References
- Thiel, E., Kreutzbruck, M., Ziegler, M. Laser-projected photothermal thermography using thermal wave field interference for subsurface defect characterization. Appl. Phys. Lett. 109 (12), 123504 (2016).
- Ibarra-Castanedo, C., Tarpani, J. R., Maldague, X. P. V. Nondestructive testing with thermography. Eur. J. Phys. 34 (6), 91-109 (2013).
- Maldague, X. P. Introduction to NDT by active infrared thermography. Mater. Eval. 60 (9), 1060-1073 (2002).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning pulsed laser spot thermography. Ndt&E Int. 44 (2), 216-225 (2011).
- Lugin, S. Detection of hidden defects by lateral thermal flows. Ndt&E Int. 56, 48-55 (2013).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning laser-line thermography and laser-spot thermography. Meas. Sci. Technol. 22 (3), (2011).
- Pech-May, N. W., Oleaga, A., Mendioroz, A., Salazar, A. Fast Characterization of the Width of Vertical Cracks Using Pulsed Laser Spot Infrared Thermography. Journal of Nondestructive Evaluation. 35 (2), 22 (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. SPIE 9761. Douglass, M. R., King, P. S., Lee, B. L. , Spie-Int Soc Optical Engineering. (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. WCNDT 2016. , 6 (2016).
- Mandelis, A. Diffusion-Wave Fields: mathematical methods and Green functions. , Springer-Verlag. (2001).
- Almond, D., Patel, P. Photothermal Science and Techniques. 10, Chapman & Hall. (1996).
- Salazar, A. Energy propagation of thermal waves. Eur. J. Phys. 27 (6), 1349-1355 (2006).
- Bennett, C. A., Patty, R. R. Thermal wave interferometry: a potential application of the photoacoustic effect. Appl. Opt. 21 (1), 49-54 (1982).
- Busse, G. Stereoscopic depth analysis by thermal wave transmission for nondestructive evaluation. Appl. Phys. Lett. 42 (4), 366 (1983).
- Holtmann, N., Artzt, K., Gleiter, A., Strunk, H. P., Busse, G. Iterative improvement of Lockin-thermography results by temporal and spatial adaption of optical excitation. Qirt J. 9 (2), 167-176 (2012).
- Pribe, J. D., Thandu, S. C., Yin, Z., Kinzel, E. C. Toward DMD illuminated spatial-temporal modulated thermography. Proc. SPIE 9861. , (2016).
- Ravichandran, A. Spatial and temporal modulation of heat source using light modulator for advanced thermography. , Missouri University of Science and Technology. (2015).
- DLP 0.55 XGA Series 450 DMD. , TexasInstruments. (2015).
- Application Note - DLP System Optics. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?baseLiteratureNumber=dlpa022&keyMatch=dlpa022&tisearch=Search-EN-Everything (2010).
- DLP LightCommander Control Software - User Manual. , LogicPD. Available from: https://support.logicpd.com/ProductDownloads/LegacyProducts/DLPLightCommander.aspx?_sw_csrfToken=318b0448 (2011).
- White Paper - Laser Power Handling for DMDs. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?literatureNumber=dlpa027&fileType=pdf (2012).
- Moench, H., et al. High-power VCSEL systems and applications. Proc. SPIE 9348. , (2015).
