

ERRATUM NOTICE
Important: There has been an erratum issued for this article. Read more …
Summary
このプロトコルは、従来の非侵襲的な画像モダリティに代わる実用的で費用対効果が高く、迅速な代替手段としてロボット超音波(米国)を実証しています。
Abstract
げっ歯類の in vivo イメージングの一般的なモダリティには、陽電子放射断層撮影法(PET)、コンピュータ断層撮影法(CT)、磁気共鳴画像法(MRI)、および超音波(米国)が含まれる。各方法には、可用性、使いやすさ、コスト、サイズ、電離放射線または磁場の使用など、制限と利点があります。このプロトコルは、げっ歯類の腎臓および心臓の インビボ イメージング、その後のデータ分析、および可能な研究アプリケーションのための3DロボットUSの使用を記述しています。ロボットUSの実用的な用途は、総腎臓容積(TKV)の定量化、ならびに嚢胞、腫瘍、および血管系の測定である。分解能は他のモダリティほど高くはありませんが、ロボットUSはより実用的な高スループットのデータ収集を可能にします。さらに、US Mモードイメージングを用いて、心機能を定量してもよい。腎臓は心拍出量の20%〜25%を受け取るので、心機能を評価することは腎臓生理学および病態生理学の理解にとって重要である。
Introduction
in vivoげent イメージングの最も一般的なモダリティには、陽電子放射断層撮影法(PET)、光学画像法(OI)、コンピュータ断層撮影法(CT)、磁気共鳴画像法(MRI)、および超音波(米国)が含まれます。これらの技術は、高解像度のin vivo画像を提供し、研究者が疾患モデルを非侵襲的に定量的に評価し、縦方向に追跡することを可能にします1。各イメージングモダリティには限界がありますが、前臨床研究のための非常に貴重なツールも提供します。
ここでは、この研究は米国のシステムを詳述し、ロボットおよび3Dげっ歯類イメージングのプロトコルを提示する。米国の波は、トランスデューサと呼ばれるプローブによって生成され、通常はハンドヘルドです。音波は組織と相互作用しながら反射され、エコーは画像に再構成されます2。ここで説明するプロトコルは、ロボット制御トランスデューサを使用し、定量的評価のための迅速な3D再構成を可能にするソフトウェアを使用して、腎臓および心臓のイメージングに焦点を当てます。
Robotic USは、高速で信頼性が高く、非侵襲的なイメージングモダリティであり、研究者はハイスループットで縦断的な研究を行うことができます。ハンドヘルドUS法と比較して、ロボットUS法は、数分で最大3匹の動物をスキャンできるため、時間効率が良いです。腎臓測定の高スループットは、1時間あたり最大20匹のマウスを画像化できることを示唆しています。ロボットトランスデューサは音響膜の下に配置され、2つの自由度で動物とは独立して移動します(図1A)。これにより、初心者ユーザーは高品質の画像を取得できますが、ハンドヘルドUSメソッドはユーザーエラーの影響を受けやすくなります。結合されたソフトウェアは、効率的でリアルタイムの3D腎臓再建を可能にします。これまで、磁気共鳴画像法(MRI)は、優れた軟部組織コントラスト、放射能の欠如、および浸透深さのために、非侵襲的イメージングのための一般的な方法であった。しかし、MRIはしばしば長い取得時間を必要とし、実行にコストがかかります。米国では、総腎臓容積(TKV)3を評価する際にMRIに代わる信頼性が高く、より迅速な代替手段として評価されています。
Protocol
このプロトコルのすべてのステップは、メイヨークリニック(ミネソタ州ロチェスター)の動物使用ガイドラインに準拠しており、メイヨークリニック施設動物ケアおよび使用委員会によって承認されています。
1. 動物モデル
- 市販の供給源からマウスを入手してください。
注:C57BL/6J(年齢=18ヶ月;n = 22(男性7人、女性15人))(材料表)およびPkd1(RC/RC)( 年齢= 18ヶ月;n = 9(男性3人、女性6人))4 が研究に使用された。
2.脱毛
- 麻酔室で気化したイソフルラン(2%〜3%)を用いて動物を麻酔する。つま先のピンチを実行して、動物が十分に麻酔されていることを確認してください。マウスが約 60 ~ 90 回の呼吸/分の速度で呼吸していることを確認し、明らかな空気のガルピングがないことを確認します。
注:気化イソフルランは、動物の麻酔レベルを制御および微調整する能力のために選択されました。酸素100%と混合したイソフルランが利用された。 - 電気カミソリを使用して、米国の測定に必要な皮膚領域を剃ります。
注:この研究では、腎臓と心臓の測定に焦点を当てているため、動物の胸と背中を剃りました。 - 脱毛クリームを綿の先端のアプリケーターで動物の剃った皮膚に塗布する。30〜60秒後に乾いたペーパータオルを使ってクリームを拭き取ってください。その後、湿ったガーゼパッドを用いて脱毛クリーム残渣を拭き取り続ける。スキャンを開始する前に、脱毛が完了していることを確認してください。
注:残りの髪の毛は画質に干渉します。完全な脱毛は非常に重要です。しかし、動物の皮膚を傷つけるのを防ぐために、1分以内に脱毛クリームを拭き取る必要があります。動物の残りの脱毛クリームは、米国機械のイメージング膜を染色する可能性があります。濡れたガーゼパッドを使用して動物の適切な清掃を確認してください。
3. 動物のポジショニング
- US マシンと、US ベイの内部発熱体のスイッチをオンにします。使用する対応する米国のベイに適した麻酔バルブをオンにします。
メモ:イメージングUSソフトウェアを起動する前に、USマシンの電源を入れる必要があります。 - 湾を膜を覆うのに十分な水で満たしてください。麻酔をかけた動物を鼻円錐形に置きます。
- 心臓測定のために、動物を臆病な位置に置き、それを約30°右に傾けます。
- 腎臓の測定のために、動物をまっすぐで仰臥位に置きます。動物の体を静かに平らにして、動物と膜の間のエアポケットを最小限に抑えます(図1B)。
注:動物の体のそばに指を走らせると、皮膚に付着している気泡を取り除くことができ、イメージングが妨げられます。米国培地として水または米国生理食塩水ゲルを使用する。しかし、水はここで議論された迅速なイメージングを容易にします。
4. 超音波測定
- イメージングUSソフトウェアで、 US集録 を選択し、計測器を初期化します。
- Bモードを用いた腎臓イメージング。
- 適切なダイアログボックスにスタディの名前を入力します。
- 適切なダイアログボックスに動物IDを入力します。
注:最大3匹の動物を順番に画像化できます。 - 3Dというラベルの付いたタブをクリックして、 3D スキャンを初期化します。
- ライブ カメラ フィードを使用して、関心領域 (ROI) ボックスを移動して腎臓を含めます。
注:ROIのサイズは、画像ターゲットのサイズに応じて調整することができる。ROIのサイズを大きくすると、スキャン時間がわずかに長くなります(図1C)。ROIサイズに応じて、スキャナは探触子がROI全体をスキャンするために必要なパス数を自動的に調整します。 - 希望する画像のタイプに応じて、 リニアアレイ または ウォブラーを選択して探触子を選択します。 高速スキャン またはいずれかの探触子用に 最適化 から選択します。
メモ: リニアアレイはより高速で、通常は適切なイメージングを提供します。ウォブラートランスデューサは、リニアアレイで所望の画質を獲得できない場合に利用することができる。ウォブラー探触子は、より高い周波数波長を利用するため、画像でより多くの精細度を提供します。高速スキャンオプションは、呼吸補正なしで中品質の画像を高速で取得します。「最適化」オプションは、もう少し時間がかかりますが、画質が向上し、呼吸補正が可能になります。この原稿では、最適化された線形配列プリセットの使用に焦点を当てます。 - ライブビューをクリックすると、目的の表示領域の ライブ 画像が表示されます。
- 探触子を移動するには、円形の [移動先 ]ボタンをクリックし、画像化するマウスの領域をクリックします。所定のステップサイズの方向矢印を使用して、探触子の位置を微調整します。
- コントロールパネルウィンドウの横にある矢印をクリックして、設定トレイを開きます。[スキャンプロトコル]をクリックして、スキャン設定を開きます。
- 理想的な焦点深度を決定し、TGC(タイムゲイン補正)のスライダーを調整して、腎臓を最もよく見るように画像コントラストを変更します。目的の設定が完了したら、矢印をもう一度クリックして 設定トレイを閉じます。
- スタティック取得ボタンを押して、3Dスキャンを開始します。
メモ:スキャンの進行状況は、ソフトウェアの左下にあるプログレスバーに表示されます。 - スキャンが完了したら、青いダウンロード矢印をクリックして プレビューモードでスキャンを開き、画質を確認します。スキャンの 3D フレーム間を移動するには、ウィンドウの上部にある赤い矢印をドラッグします。ズームインまたはズームアウトするには、Ctrl キー を押し ながらマウスのスクロール ボタンを使用します。
- 追加の動物をスキャンするには、動物IDダイアログボックスを更新し、新しいIDを入力してから、上記の手順を繰り返します。
注:スキャンが完了したら、動物を乾かして自宅のケージに戻してください。
- Mモードを用いた心臓イメージング。
注:Mモードは、特定の選択された超音波ラインに沿った超音波の表示です。- [Mモード]タブをクリックして、心臓イメージングを有効にします。
注: 一度に画像化できる動物は 1 匹だけです。 - 動物が心臓スキャンに適した位置にあることを確認します(ステップ2.2)。ROIを心臓のおおよその位置に移動します。
- ハートファインダーボタンを押して心臓を見つけます。ヒートマップを使用して、探触子の位置を最適化します。円形の[移動]ボタンを使用して、トランスデューサを左心室に移動します(図2A)。
- ライブビューに移動し、矢印ボタンを使用して乳頭筋の間に探触子を配置します(図2B)。探触子が正しく配置されていることを確認するには、ライブMモードトレースを表示します(図2D)。
- 探触子が適切な位置になったら、 シーケンスの集録をクリックします。青いダウンロード矢印をクリックして、完了したスキャンを表示します。
- [Mモード]タブをクリックして、心臓イメージングを有効にします。
5. 腎臓解析(解析力学)
- [画像 解析 ]タブを開き、[ ボリュームのロード] ボタンを選択して、画像ファイル/フォルダを入力します。
- セグメンテーション
- さまざまな平面を表す色付きの線を移動して、すべての平面で腎臓を見つけます。
- [ 追加 ] をクリックして、新しいセグメンテーションを追加します。ファイルのマークアップ名を指定します。
- [サーフェスカット]ボタンを使用して、複数の平面で腎臓の外縁の周りにポイントを追加します。[適用]をクリックして、腎臓全体にわたってセグメンテーションを生成します(図3A)。
- 各平面の異なるフレームをスクロールし、[編集]をクリックしてポイントを正しい場所にドラッグして、不正確な領域 を編集し ます。
- または、腎臓の形状が不規則な場合は、 Draw 関数を使用して、腎臓の周りに不規則な形状の痕跡を作成します。エッジの周りのポイントをクリックするか、左クリックを押したままにしてトレースをフリーハンドで描画します。
- [描画] ボタンでトレースを完了するには、マウスで右クリックします。複数のフレーム先にスクロールし、トレース処理を繰り返します。
- 対象領域全体でフレームがトレースされるまで繰り返します。
- 「描画」機能を使用する場合は、「スライス間で塗りつぶし」を選択してトレースを確認および調整します。[初期化]をクリックしてプレビューを表示します。プレビューが受け入れられる場合は、[適用]をクリックします。そうでない場合は、[キャンセル]をクリックしてトレースを変更します。
メモ: [消去] ボタンを使用すると、トレース内の領域を削除できます。 「滑らか」 ボタンは、トレースのギザギザのエッジを滑らかにします。 - 画像解析に問題がなければ、[ 保存 ] を選択して解析を元の画像ファイルに保存します。
- 測定
- キャリパー関数を使用して、画像内のフィーチャを測定します。「キャリパー」ボタンをクリックし、測定する距離の2点を左クリックします(図3B)。
- 画面上部のディスクボタンをクリックして、測定値を保存します。
- セグメンテーション
6. 心臓分析
- 「ボリュームのロード」を選択して、分析するファイルを入力します。
- [追加] オプションを選択します。
- ポイント配置ツールを使用して、心臓組織の各層の収縮期と拡張期をトレースします。心臓組織の他の層で続行します。Edit機能を使用してトレースを変更します(図2C、D)。
メモ: M モードトレースが非常に明確な場合は、[ 追加 (自動) ] ボタンを使用して、各レイヤーのトレースを自動的に生成します。 - [適用] を選択して、心臓パラメーターを計算します。「定量化」タブを表示し、「統計のエクスポート」を選択して、すべてのデータを *.csv ファイルとしてエクスポートします (図 2E)。
Representative Results
腎臓分析結果
表面積および体積データは、腎臓のセグメンテーションから取得される。この情報は、実験モデルと対照モデルを比較したり、時間の経過に伴う変化を追跡したりするために使用できます。ノギスツールは、異常(嚢胞、腫瘍など)とそれらが時間の経過とともにどのように長さが変化するかを迅速に測定するのに役立ちます。 図3は 、セグメンテーション法とノギス法の両方を使用して嚢胞体積を正確に測定できることを示唆している。 図4 は、年齢適合対照マウスと実験的(Pkd1RC/RC)マウスとの間の総腎臓容積(TKV)の明確な差を示しています。これらのボリュームレンダリングの3D視覚化は、3D空間内の回転を含め、システム内で実行され得る(図5)。これらの3D再構成は、TKV(mm3; 図4)個々の大きな嚢胞体積と同様に。
心臓分析結果
Mモード画像の解析から多くの有用なパラメータが取得されます。これらのデータは、その時点での左心室(LV)心機能の良好なスナップショットを提供します。データ出力には、LV内径、LV後壁、LV前壁径、駆出率、分数短縮、一回拍出量、心拍数、心拍出量、LV容積、およびLV質量が含まれる。心臓分析の成功は、M Mode画像上の層の正確なセグメンテーションにかかっています。ほとんどの心血管結果は、後心内膜層および前心内膜層のピーク収縮期および拡張期段階によって計算される。後心外膜層は明るい白色に見え、後心内膜層と同様のパターンに従う。後心内膜層のトレースは、最も低い輪郭に配置する必要があります。前心内膜層は、その層の最高輪郭に沿ってトレースされるべきである。前心外膜層は、動物の傾向のある位置のために、画像の下部に直線的に現れる(図2D)。 図6 は、実験マウスと対照マウスの間で心拍出量に有意差のない1つの研究の例を示す。腎イメージングと同様に、3D心臓可視化が可能です。それにもかかわらず、心周期の4D可視化(補足図1)により、研究者は、評価された動物の形態学的および周期動的異常の両方を視覚化し、特定することができる。
形態評価
迅速かつ安価な評価のために、米国は生理学的パラメータを縦方向に効果的に監視することができる。しかし、多くの研究は、嚢胞の数およびサイズ、石灰化(腎臓結石)、血管新生、または線維症の程度など、より微細な形態学的特徴をさらに決定することを望む。 図7 は、正常なマウス腎臓を嚢胞性マウス腎臓と中程度に石灰化したマウス腎臓と比較したものである。米国の中心周波数(リニアアレイでは10MHz)を35MHz(ウォブラーアンプ)に増やすことで、ディテールが増す画像が得られます。

図1:超音波システムとマウスの配置 。 (A)超音波システムとトランスデューサの位置の図。(B)超音波プラットフォーム上の仰臥位にあるマウスのビュー。(C)動物IDを有する関心領域(腎臓)の対象領域(ROI)の例。 この図の拡大版を表示するには、ここをクリックしてください。

図2:生理学的パラメータを取得するための心臓超音波イメージング。 (A) Heart Finder ヒートマップ画像を使用して、Mモードイメージングのためにトランスデューサを左心室に配置します。左心室のトランスデューサの位置は、大きな緑色の点で示されます。(B)乳頭筋の上に正しく配置したときのトランスデューサの図(点線の箱)。(C)心臓パラメータの測定に必要な層の例図。(D)パネルC.のように指定されたレイヤーによるライブMモード画像のビュー(上から下へのレイヤー:後心外、後心内、前心骨、前外心。(E)心臓測定から生成された統計の出力例。 この図の拡大版を表示するには、ここをクリックしてください。

図3:セグメンテーションおよびノギスツールを使用して腎臓および 嚢胞を測定する(A)腎臓(青色およびオレンジ色の陰影)および大嚢胞(黄色)の両方のセグメンテーション(軸方向図)の例。セグメント化されていないビューは、不明瞭な米国を表示できるように、下に表示されます。(b)以下の測定値と同じ嚢胞を測定するためのノギスの使用例(矢状図)を 図3A から示す。体積は、楕円の式を用いて計算した(体積=(4/3)π x a x b x c、ここでa、b、cはそれぞれ相対x、y、zである)。 この図の拡大版を表示するには、ここをクリックしてください。

図4:WTおよび嚢胞性マウス腎臓のTKV分布。 野生型(WT)(C57BL/6J)および罹患(Pkd1RC/RC)マウスのTKVの表現。n = 22 (WT) n = 9 (Pkd1RC/RC);両側 t検定の結果:p<0.0001であった。ボックスは25〜75パー センタイル値を示し、ウィスカは4分位範囲の1.5倍を示します。 この図の拡大版を表示するには、ここをクリックしてください。

図5:セグメント化された腎臓と嚢胞のアニメーション3D再構成。 ソフトウェアを使用して、腎臓および嚢胞の3D投影を3D空間内で回転または揺動させることができる(青色=左腎臓;黄色=大きな嚢胞;オレンジ=右腎臓)。 この図をダウンロードするには、ここをクリックしてください。

図6:米国の測定値からの心臓生理学的パラメータ。 WTおよび罹患(Pkd1RC/RC)マウスの心拍出量(mL/min)の表現。n = 22 (WT) n = 9 (Pkd1RC/RC).下の表のデータは、駆出率、一回拍出量、心拍数(HR)、または心拍出量(CO)においてこれら2つの群に有意差がないことを示している。両側 t検定の結果:p>0.05。ボックスには、25 ~ 75 パー センタイルの値が表示されます。 この図の拡大版を表示するには、ここをクリックしてください。

図7:正常および2つの病状の米国矢状切片の比較。 (A)野生型(C57BL/6J株)腎臓(TKV = 143.202 mm3)。(B)TKVが増加した嚢胞腎(Pkd1RC/RCマウス)(TKV = 333.158 mm3)。嚢胞は黄色の矢印で示される。(C)血管石灰化を伴う腎臓(モデル=低密度リポタンパク質受容体欠損、アポリポタンパク質B100のみのマウスに12ヶ月間西洋食を与えた5)(TKV=127.376mm3)。腎結石は緑色の矢印で示される。この図の拡大版を表示するには、ここをクリックしてください。
補足図1:米国の測定値からの4D心周期ムービー。ソフトウェアを使用して、鼓動する心臓の表現を3D USでキャプチャし、心臓周期を通して投影します。緑色の矢印は大動脈弁を示す。(モデル=低密度リポタンパク質受容体欠損、アポリポタンパク質B100のみのマウス、西洋食を12ヶ月間給餌した5)。このモデルは、米国における石灰化の音響反射率が高いため、心臓および弁の視覚化を容易にする血管石灰化を生成する。同様の4D再構成はWTマウスでも可能です。ただし、キャプチャされた音響コントラストはそれほど高くありません。 このファイルをダウンロードするには、ここをクリックしてください。
Discussion
超音波は音波を利用しており、音波の伝播に対する障壁は画質に干渉します。したがって、画像化される領域の完全な脱毛が重要である。脱毛クリームは動物の皮膚の火傷/刺激を引き起こし、スキャナーの透明な膜を変色させる可能性があるため、脱毛クリームを完全に除去することも重要です。ベイ内の適切な水位は、最適な音波伝搬のために必要であり、したがって、最高の画像解像度を得るために必要である。ただし、動物が臆病な姿勢にある場合は、動物の鼻が水位を超えているか、動物が水を吸入する危険性があることを確認してください。イメージングパラメータ、特に焦点深度の最適化は、高品質の画像を得るために重要です。パラメータの変更は、個々の動物のために必要であり得る。
Robotic USは、従来のハンドヘルドUSモダリティよりも多くの利点を提供します。まず、このシステムはシンプルなポイントアンドクリックカメラベースのインターフェースを使用します。この機能は、従来の米国の複雑さに対処し、初心者ユーザーによって操作された場合でも一貫したデータを生成します6。第二に、このシステムは、音響媒体として従来の米国のゲルではなく水の使用を可能にする。以前は、米国ゲルの使用は、高品質の画像取得を妨げる気泡の形成を可能にした。また、米国のゲルは乱雑で、クリーンアップの課題を提供します。さらに、水はヒートランプによって暖められ、動物の体温を維持するのを助けます。第三に、ロボットの米国はより高速であるため、呼吸運動による人工物は問題になりません。イメージング速度の向上により、高スループットのデータ収集を実用的に完了できます。第四に、ロボットUSは3D画像を取得するため、オブジェクトの3D再構成が簡単になります(図4)。MRIやその他のモダリティは高価で時間がかかり、常に利用できるとは限りません。重要なことに、ロボットの米国システムはテーブルやベンチに収まり、より費用対効果が高いです。最後に、以前の研究は、ロボット米国がMRI3などのより高価なモダリティに匹敵する測定データを提供できることを実証しました。
本研究で説明した米国ロボットシステムの画質と解像度は、提案するアプリケーションには十分であったが(図7)、将来的に画質を向上させる方法はいくつかある。たとえば、より高い周波数の探触子(50~70MHzなど)を利用すると、より優れた特徴定義を備えた高解像度の画像が得られます。より高い周波数を利用すると浸透の深さが悪くなりますが、画像はマウス腎臓などの表在器官の in vivo イメージングには十分であるはずです。他の画像化モダリティと同様に、造影剤は、特定の特徴を増強するために使用され得る。米国にとって、これは通常、音波を非常に反射するものを使用することを意味します。脂質が非常に小さな気泡を取り囲む血管内マイクロバブルは、そのような薬剤の1つである。ミクロンサイズの気泡は反射性が高く、したがって、血管系の高解像度に変換される第2の明確な信号を提供します7。この音響コントラスト技術は非常に便利ですが、いくつかの欠点があります。まず、マイクロバブルを新鮮にし、5〜10分間のみ インビボで 持続させる必要があります。第二に、 in vivo 血管内注射は、典型的には、注射のためにテールベールカテーテル法を必要とし、これは技術的に困難な場合がある。特定の状況および脈動体制下では、マイクロバブルイメージング自体が腎血管系の損傷につながる可能性があります8。
使用される特定の米国のシステムには、より一般的な制限もあります。第1に、ロボットシャーシには1つのリニアアレイ(18MHzを中心とする)しか含まれていないため、現在、高周波または低周波数のプローブに切り替えることはできません。これは、システムで評価できるモデルの幅 (大きいか小さいかのいずれか) に影響を与える可能性があります。この装置の将来の反復には、前臨床動物モデルの全範囲をカバーするために複数の線形配列を含める必要があります。第2に、動物被写体に対するトランスデューサ角度を制御することはできません。したがって、ドップラーなどの角度依存的な画像化技術を実行するか、または特定の器官の代替の面内視(例えば、腎臓の長軸図)を達成することは、動物の再位置合わせを必要とし、達成することが困難であり得る。この課題を改善するために、ロボットの動きにさらなる自由度を追加することができます。第三に、時折、動物をトランスデューサから分離する音響膜から生じる残響アーチファクトを観察し、表面的な特徴や境界の視覚化を不明瞭にすることがあります。このような場合、ゲルスタンドオフを使用して動物を膜から遠ざけると、状況を改善することができます。最後に、ヒートランプによる温度制御は不正確であるため、イメージング中に動物の深部体温に細心の注意を払う必要があります。統合された加熱パッドなど、より制御された加熱メカニズムは、恒常性管理とイメージングスループットを向上させる可能性があります。
ロボット米国の使用は、研究の様々な分野に適用できる可能性があります。この技術は、総組織構造の可視化を可能にするため、腫瘍の進行および潜在的な治療法6,9、ならびにここで提示される腎形態を追跡するために使用することができる。画像の特定の特徴をセグメント化する機能は、多発性嚢胞腎(PKD)のモデルを研究するための魅力的なツールになります3。Mモード画像は、多くの重要な心臓パラメータの簡単な定量化を可能にし、心臓生理機能のin vivo評価を可能にします。腎臓は心拍出量の20%〜25%を受け取るため10、腎病理の縦断的評価中に心機能を理解することは重要です。これらの米国のプロトコルを通じて、我々は、米国のイメージングがin vivoおよび縦断的腎臓研究に実用的であるだけでなく、ますます米国のツールが前臨床試験におけるマウスの形態学的および生理学的評価の両方を可能にすることを実証しようとしました。
Disclosures
何人かの著者は、SonoVol, Inc.(CJM、RCG、TJC)によってライセンスされた特許に雇用されているか、重大な財政的関心を持っているか、または共同発明者です。
Acknowledgments
この研究はNIH(R43-DK126607、TJC、TLK、MFR)とメイヨー財団の支援を受けた。
Materials
| Name | Company | Catalog Number | Comments |
| Electric Razor | Braintree Scientific, Inc | CLP-9868 14 | |
| C57bk6j | The Jackson laboratory | https://www.jax.org/ | |
| Cotton gauze pads | Fisher Scientific | ||
| Cotton tipped applicators | Fisher Scientific | ||
| Depilatory cream | N/a | N/a | This study used Nair |
| Heat lamp | Included with SonoVol Vega system | ||
| Robotic Ultrasound System | SonoVol Inc | SonoVol Vega system includes anesthesia system | |
| SonoEQ Software | SonoVol | Included with SonoVol Vega system | |
| TERRELL Isoflurane | Piramal Critical Care, Inc | NDC 66794-019-10 |
References
- Cunha, L., et al. Preclinical imaging: an essential ally in modern biosciences. Molecular Diagnostics & Therapy. 18 (2), 153-173 (2014).
- Ultrasound. NIBIB. , Available from: https://www.nibib.nih.gov/science-education/science-topics/ultrasound#pid-936 (2016).
- Beaumont, N. J., et al. Assessing polycystic kidney disease in rodents: Comparison of robotic 3d ultrasound and magnetic resonance imaging. Kidney360. 1 (10), 1128-1136 (2020).
- Hopp, K., et al. Functional polycystin-1 dosage governs autosomal dominant polycystic kidney disease severity. The Journal of Clinical Investigation. 122 (11), 4257-4273 (2012).
- Weiss, R. M., Ohashi, M., Miller, J. D., Young, S. G., Heistad, D. D. Calcific aortic valve stenosis in old hypercholesterolemic mice. Circulation. 114 (19), 2065-2069 (2006).
- Czernuszewicz, T. J., et al. A new preclinical ultrasound platform for widefield 3D imaging of rodents. Review of Scientific Instruments. 89 (7), 075107 (2018).
- Chong, W. K., Papadopoulou, V., Dayton, P. A. Imaging with ultrasound contrast agents: current status and future. Abdominal Radiology (NY). 43 (4), 762-772 (2018).
- Nyankima, A. G., Kasoji, S., Cianciolo, R., Dayton, P. A., Chang, E. H. Histological and blood chemistry examination of the rodent kidney after exposure to flash-replenishment ultrasound contrast imaging. Ultrasonics. 98, 1-6 (2019).
- Rojas, J. D., et al. Ultrasound measurement of vascular density to evaluate response to anti-angiogenic therapy in renal cell carcinoma. IEEE Transactions on Biomedical Engineering. 66 (3), 873-880 (2019).
- Boron, W. F., Boulpaep, E. L. Medical Physiology. 3rd edn. , Elsevier. (2017).
Tags
医学 第174号Erratum
Formal Correction: Erratum: Use of 3D Robotic Ultrasound for In Vivo Analysis of Mouse Kidneys
Posted by JoVE Editors on 10/06/2021.
Citeable Link.
An erratum was issued for: Use of 3D Robotic Ultrasound for In Vivo Analysis of Mouse Kidneys. An author name was updated, along with the Protocol and Representative Results sections.
The name of an author was updated from:
Ryan C. Gesser
to:
Ryan C. Gessner
Step 3.1 of the Protocol was updated from:
Turn on the US machine and the heat lamp above the US platforms. Turn on the appropriate anesthesia valves for the corresponding US bays that will be used.
to:
Turn on the US machine and the switch for the internal heating element for the US bays. Turn on the appropriate anesthesia valves for the corresponding US bays that will be used.
Figue 1 in the Representative Results was updated from:
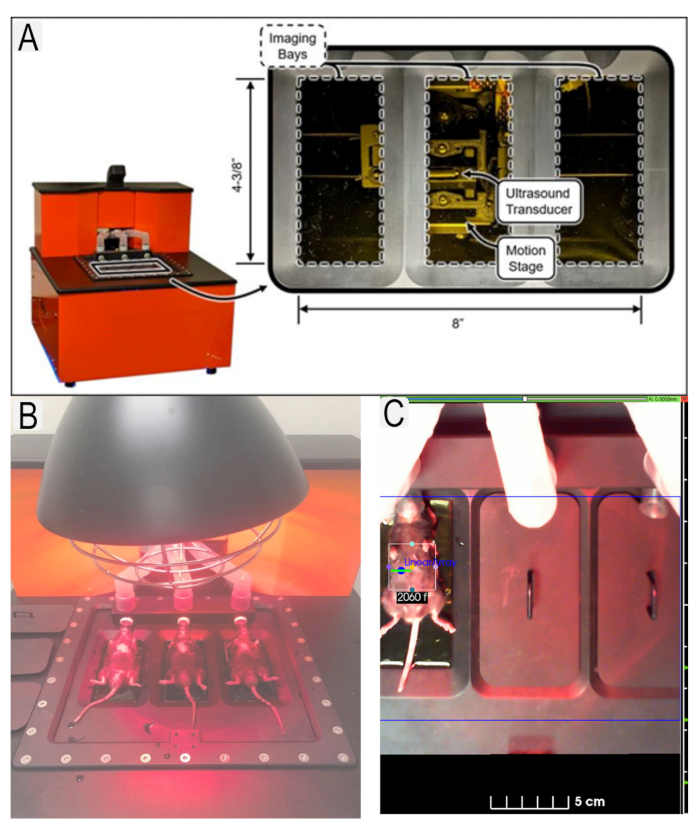
Figure 1: Ultrasound system and mouse placement. (A) Diagram of ultrasound system and location of transducers. (B) View of mice in supine position on ultrasound platform with heat lamp. (C) Example of region of interest (ROI)s in place for area of interest (kidneys) with animal IDs. Please click here to view a larger version of this figure.
to:
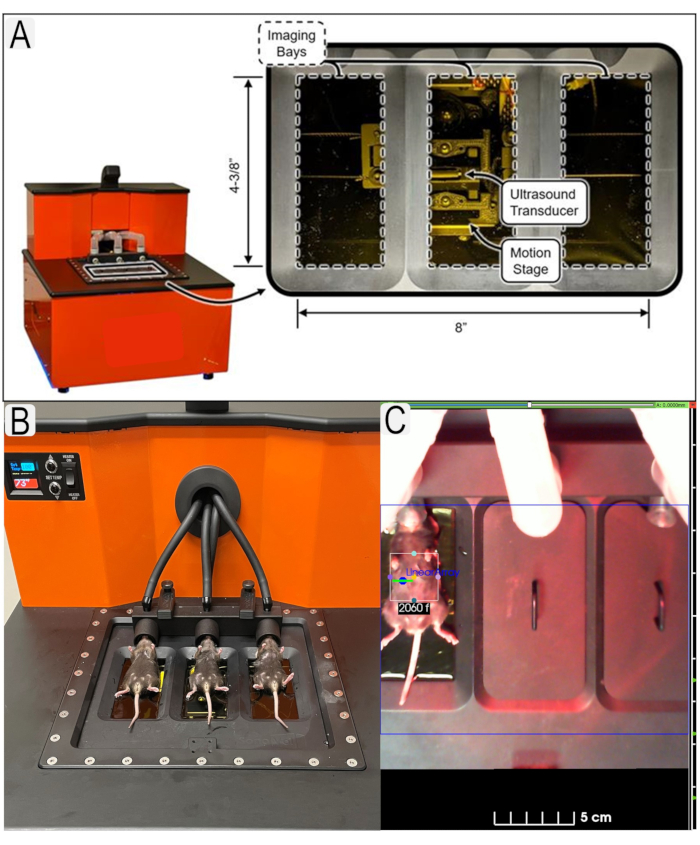
Figure 1: Ultrasound system and mouse placement. (A) Diagram of ultrasound system and location of transducers. (B) View of mice in supine position on ultrasound platform. (C) Example of region of interest (ROI)s in place for area of interest (kidneys) with animal IDs. Please click here to view a larger version of this figure.
