

Summary
Se presenta una novedosa técnica inalámbrica para registrar señales neuronales extracelulares del cerebro de la natación libre de peces dorados. El dispositivo de grabación se compone de dos tetrodes, un microdrive, un registrador de datos neuronales y una caja impermeable. Todas las piezas están hechas a medida, excepto el registrador de datos y su conector.
Abstract
Los mecanismos neuronales que rigen el comportamiento de los peces siguen siendo en su mayoría desconocidos, aunque los peces constituyen la mayoría de todos los vertebrados. La capacidad de registrar la actividad cerebral de los peces que se mueven libremente avanzaría considerablemente la investigación sobre la base neuronal del comportamiento de los peces. Por otra parte, el control preciso de la ubicación de registro en el cerebro es fundamental para estudiar la actividad neuronal coordinada a través de las regiones en el cerebro de los peces. Aquí, presentamos una técnica que registra de forma inalámbrica desde el cerebro de nadar libremente peces mientras controla para la profundidad de la ubicación de grabación. El sistema se basa en un registrador neural asociado con un nuevo implante compatible con el agua que puede ajustar la ubicación de grabación mediante tetrodes controlados por microunidad. Las capacidades del sistema se ilustran a través de grabaciones del telencéfalo de peces dorados.
Introduction
Los peces son el grupo más grande y diverso de vertebrados, y al igual que otros vertebrados exhiben habilidades cognitivas complejas como navegar, socializar, dormir, cazar, etc. Sin embargo, los mecanismos neuronales que rigen el comportamiento de los peces permanecen en su mayor parte desconocidos.
En las últimas décadas, las grabaciones extracelulares de peces inmovilizados se han implementado principalmente para investigar diferentes aspectos de la base neuronal del comportamiento1,2. Aunque esta técnica es apropiada para algunos sistemas sensoriales, la investigación de todo el espectro de la base neuronal del comportamiento es difícil, si no imposible, en animales inmovilizados. Los primeros avances implicaron la grabación de las células Mauthner de peces nadadores atados3,4. Sin embargo, las células Mauthner son desproporcionadamente grandes y las amplitudes potenciales de acción registradas, que pueden ir tan alto como unos pocos mV, facilitan la grabación. Más tarde, Canfield y otros describieron una prueba de concepto cuando se utiliza un animal atado para registrar el telencéfalo de los peces5. Otra técnica reciente para registrar la actividad neuronal de los peces es la toma de imágenes de calcio (ver comentarios de Orger y de Polavieja6, y Vanwalleghem et al.7). Esta técnica fue desarrollada para su uso con larvas de pez cebra porque la piel y el cráneo son transparentes durante la etapa larval. Sin embargo, esta técnica no se puede utilizar para estudiar comportamientos complejos en etapas posteriores de desarrollo.
Aquí, presentamos una técnica novedosa para registrar la actividad neuronal extracelular desde el cerebro de los peces que nadan libremente. Esta es una versión modificada del protocolo descrito en Vinepinsky et al.8. La principal innovación es la adición de un microdrive que permite controlar la posición de los electrodos después de la cirugía. La técnica está diseñada para grabar desde el telencéfalo de peces dorados utilizando un conjunto de tetrodes que están conectados a un registrador de datos neuronales a través de un micromotor. Toda la configuración es inalámbrica y anclada al cráneo del pez. El peso específico del sistema se iguala al peso específico del agua mediante la adición de un pequeño flotador que permite a los peces nadar libremente.
La técnica se basa en el uso de un registrador de datos neuronales que amplifica, digitaliza y almacena la señal en un dispositivo de memoria integrado. El sistema de telemetría del registrador se utiliza para iniciar y detener las grabaciones, y para la sincronización con la cámara de vídeo. En este protocolo, se utiliza un registrador neural de 16 canales, integrado en una caja impermeable junto con el micromotor.
El conjunto de microunidades se fabrica a partir de dos componentes principales: el propio micromotor y la carcasa de microunidad(Figura 1A,B). La carcasa sostiene el micromotor y los tetrodes, y también actúa como el ancla entre el cráneo y la caja del registrador(Figura 1C). La caja registradora de PVC se fabrica mediante un proceso de máquina y se sella mediante una red tórica(Figura 1E-G,véase también Figura suplementaria 1, Figura suplementaria 2y Figura suplementaria 3 para un diagrama tridimensional [3D]). En un extremo, un pedazo de espuma de poliestireno se une a la caja del registrador para compensar el peso del implante y proporcionar al pez un implante neutro de flotabilidad. La construcción del micromotor descrito en el protocolo sigue el procedimiento presentado por Vandecasteele et al.9 con una modificación para conectar el micromotor a la carcasa(Figura 1A). Se presentan todos los pasos principales.
El procedimiento descrito en el protocolo para preparar el cráneo de pescado es similar al que se presenta en Vinepinsky et al.8 y se describe brevemente en el protocolo. Un día después de la cirugía, los peces normalmente se recuperan completamente de los efectos de la anestesia y están listos para los experimentos conductuales. Tenga en cuenta que la ubicación del tetrode se puede ajustar girando el tornillo de micromotor. El tornillo tiene un espaciado de 300 m por rotación completa y se recomienda un avance de 75 m hasta que se alcance la ubicación del cerebro objetivo. Se debe consultar un atlas cerebral adecuado para apuntar a la región cerebral específica de interés. Es aconsejable probar la impedancia del electrodo cada vez que el pez es anestesiado para el reemplazo de la batería o la tarjeta de memoria.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
Todos los procedimientos de cirugía deben ser aprobados por los comités de ética local sobre bienestar animal (por ejemplo, IACUC).
1. Construcción de la carcasa Microdrive
- Para construir la carcasa, corte una placa de latón de 1 mm de ancho en una placa de 19 mm x 29 mm x 1 mm utilizando una sierra. Corte dos aberturas de 5,5 mm en cada uno de los lados largos perpendiculares al borde, de modo que cada abertura esté a 6,5 mm de distancia de los lados estrechos(Figura 2A).
- Usando alicates, doble el área entre las hendiduras en los lados largos hacia adentro, luego doble la parte inferior hacia adentro y el lado superior hacia afuera para obtener la carcasa(Figura 2B,C).
- Usando una broca de 3 mm, haga agujeros para tornillos en la carcasa de la microunidad.
NOTA: Estos orificios se utilizarán más adelante para fijar la carcasa a la caja del registrador(Figura 2D). - Soldar los lados de la carcasa.
- Usando un archivo circular fino, genere una pequeña hendidura semicircular de 1,5 mm en radio en la parte inferior de la carcasa(Figura 2E).
NOTA: Esto se utilizará más adelante para insertar el tubo de acero inoxidable para guiar los electrodos. - Utilice una broca de 1 mm para hacer un agujero en la parte posterior de la carcasa para los tetidas(Figura 2F).
NOTA: Un modelo 3D de la carcasa se encuentra en el archivo de alojamiento suplementario.stl.
2. Construcción del Microdrive
- Con un cortador, rompa una pieza de tres pines de una tira de cabezal de pasador macho de una sola fila (Figura 1H). Con alicates, extraiga el pasador central.
- Con una fresa, corte los pasadores restantes a 10 mm de longitud (2 mm menos que la longitud del tornillo). Otra posibilidad es utilizar un tornillo más largo (ver paso 2.4).
- Taladre un agujero utilizando una broca #65 a través del agujero del pasador central. Taladre un hilo con un grifo de 00 a 99.
- Montar el micromotor y las placas de latón (7,5 mm x 2,5 mm x 0,6 mm, ver Figura suplementaria 4) de forma que las placas de latón toquen los pasadores. Inserte un tornillo (cabezal redondo #00-90, 12 mm, latón) a través de la primera placa de latón, luego a través de la rosca del cabezal del pasador y la segunda placa de latón. Por último, coloque una tuerca en el tornillo y apriete suavemente la microunidad montada.
- Soldar los pasadores junto con las placas de latón, y la tuerca con la punta del tornillo.
- Soldar el micromotor en la carcasa de microdrive en cuatro puntos en los lados de las placas de latón microdrive.
- Corte un tubo de acero inoxidable de 6 mm de largo con un diámetro interior de 1,5 mm y otro tubo de acero inoxidable de 3 mm de largo con un diámetro interior de 1,2 mm. Pulir los extremos de los tubos para evitar extremos afilados.
- Pegue el tubo de 6 mm de largo a la pequeña hendidura semicircular en la parte inferior de la carcasa de micromotor utilizando epoxi. Pegue el acero inoxidable de 3 mm de largo en el cabezal del pasador, alineado con el tubo de 6 mm de largo en la carcasa.
- Corte dos segmentos de tubo de silicona de 5 cm de largo con diámetro de 0,64 mm y un tubo de poliimida de 5 cm de largo con diámetro de 0,250 mm.
- Inserte los tres tubos en los dos tubos de acero inoxidable. Pegue los tubos al tubo de acero inoxidable unido al cabezal del pasador utilizando pegamento de cianoacrilato. Atornille el micromotor y corte el exceso de tubos de la parte superior e inferior de los dos tubos de acero.
NOTA: El micromotor con la carcasa ya está listo para su uso(Figura 1C).
3. Preparación de la matriz Tetrode
- Para fabricar un implante de dos tetrodes con cuatro electrodos en cada tetrode, prepare ocho cables, cada uno de 12 cm de largo, aislado Formvar, de alambre de tungsteno de 25 m de diámetro.
NOTA: El mismo diseño puede acomodar cuatro tetrotas. - Coloque un soporte para una placa de interfaz de electrodo de 16 canales (EIB-16) PCB (ver Tabla de Materiales)bajo el microscopio.
- Usando una pinza de punta suave y un encendedor, retire el recubrimiento de cada uno de los ocho cables de un lado usando la llama.
NOTA: Esto es para asegurarse de que el cable se conectará correctamente al conector PCB más adelante. - Empuje un cable en uno de los orificios del EIB-16 con el lado recubierto en el agujero. Coloque un pasador y presiónelo con alicates. Compruebe la conectividad midiendo la resistencia entre el pasador y el lado no recubierto del cable.
NOTA: La resistencia está en el orden de decenas de Ohms. - Repita el paso 3.4 con los ocho cables.
- Pegue dos grupos de cuatro cables juntos usando cinta adhesiva al final de cada cable.
NOTA: Cada grupo se pegará juntos más tarde para formar un tetroda. - Cortar una pieza de alambre de tungsteno de 12 cm de largo con un diámetro de 50 m. Conéctelo a una de las conexiones EIB-16.
NOTA: Este cable servirá como electrodo de referencia. - Cortar dos alambres de plata desnuda de 12 cm de largo con un diámetro de 75 m que servirán como base para el registrador de grabación. Soldar los dos cables a la conexión a tierra en el EIB-16.
- Sostenga el EIB-16 por encima de un dispositivo de torneado motorizado y coloque el extremo de cinta adhesiva de un grupo de cuatro cables en el dispositivo de afinación motorizado. Aplique 130 rondas en el sentido de las agujas del reloj seguidas de 20 rotaciones en sentido contrario a las agujas del reloj. Aplique pegamento de cianoacrilato para cubrir el tetrodo.
- Espera a que se cure el pegamento. Corte el tetrodo cerca de la cinta adhesiva.
- Repita los pasos 3.9 y 3.10 con el segundo tetrode.
NOTA: Esto produce la matriz de dos tetrodes terminado(Figura 1D).
4. Montaje del implante
- Al diablo con la microunidad hasta el fondo.
- Usando 1 x 3M Phillips tornillos de cabeza redonda, conecte el EIB-16 a la placa de PVC.
- Usando pinzas de extremo suave, tire de todos los tetrodes y cables a través del agujero en la parte delantera de la cubierta de la caja del registrador.
- Usando los tornillos de cabeza plana Phillips de 2 x 6M, conecte la placa de PVC a la cubierta de la caja del registrador. Mantenga el conector EIB-16 en la orientación correcta para que el registrador pueda montarse en el EIB-16. Asegúrese de que el EIB-16 esté fijado en su lugar para evitar artefactos de movimiento en la señal grabada.
- Selle los cables a la caja con epoxi. Aplicar lo menos posible porque el sellado primario se realizará por vulcanización de temperatura ambiente (RTV) más adelante.
- Fije la carcasa de la microunidad a la cubierta de la caja del registrador con tornillos de 2 mm.
- Enrosque los tetrodes y todos los cables a través del orificio en la parte posterior de la carcasa de la microunidad. Enrosque los tetrodes a través de los dos tubos de silicona en el micromotor. Enhebrar el cable de tungsteno de 50 m a través del tubo de poliimida en el micromotor.
- Pegue los tetrodes y los cables a sus tubos aplicando pegamento de cianoacrilato en el extremo superior de los tubos, para asegurar que el movimiento sea consistente con el micromotor. Atornilla roscar el micromotor hasta la parte superior.
- Aplique petróleo blando (ver Tabla de Materiales)en el tetrodo expuesto y los cables dentro de la carcasa de la microunidad para evitar el movimiento.
- Corte una ventana inferior de 12 mm x 14,5 mm Petri con una cuchilla de afeitar calentada. Fije la ventana a la parte delantera de la carcasa de micromotor con epoxi. Mantenga los cables de tierra fuera de la ventana.
- Aplique el recubrimiento RTV a los tetrodes y cables expuestos entre la cubierta de la caja del registrador y la carcasa de la microunidad.
- Después de curar la RTV, cierre la caja con un pequeño peso en el interior y sumerja en agua durante la noche para asegurarse de que no haya fugas de agua en la caja.
- Corte los teturos y el alambre de referencia a la longitud deseada utilizando tijeras afiladas.
- Fije la espuma de poliestireno extruida marcada (ver Tabla de materiales)a la caja. Ajuste su tamaño para que su flotabilidad se equilibre cuando se sumerme en un baño de agua.
- Sumerja las puntas de tetrode en solución de color negro platino y utilice una corriente directa (-0,2 oA) para recubrir los electrodos y ajustar la impedancia de los electrodos como desee. Utilice un probador de impedancia multielectrodo (consulte Tabla de materiales)para las mediciones de recubrimiento e impedancia.
NOTA: En el palio de peces dorados, un valor de 40 kOhm es mejor. Dependiendo de la aplicación, la impedancia del electrodo se puede ajustar modificando el recubrimiento negro platino10,11.
5. Preparación de la anestesia — 1% MS-222 Solución de stock
PRECAUCION: La preparación de la anestesia incluye el uso de MS-222 en polvo, un carcinógeno. Por lo tanto, los pasos 5.2 y 5.3 deben hacerse en una campana química usando guantes.
- Añadir 100 ml de agua a un tubo que pueda contener más de 100 ml.
- En una campana química, coloque una placa de ponderación desechable en una báscula. Añadir 1 g de polvo MS-222 usando una espátula, luego añadir el polvo al tubo.
- Agitar bien el tubo.
NOTA: En forma líquida, MS-222 se puede utilizar fuera de la campana química usando guantes, pero no requiere una máscara. - Coloque una placa de ponderación desechable en una báscula. Añadir 2 g de bicarbonato de sodio usando una espátula, luego añadir el polvo al tubo. Agitar bien el tubo.
6. Preparación de la calavera de pescado
NOTA: En esta etapa, el pez está listo para la cirugía de implantes. Antes de la cirugía, asegúrese de que todos los componentes y suministros han sido esterilizados por los procedimientos apropiados. Para este paso, se necesita un portapeces en forma de U fuera del agua. En este protocolo, se utiliza un soporte de aluminio que se adapta a un pez dorado largo de cabeza a cola de 15 cm. Este sistema mantiene a los peces fuera del agua mientras perfunde las branquias con agua oxigenada. Para obtener más información, véase Vinepinsky et al.8.
- Coloque el pescado en un baño de agua 0.02% MS-222 durante 20 minutos hasta que el pez esté dormido.
- Con guantes estériles, saque el pescado del agua y colóquelo en el soporte.
NOTA: El agua oxigenada que perfunde el pescado contiene MS-222 a una concentración de 0.02%, por lo que el pez permanece anestesiado durante la cirugía. - Usando una espátula estéril, aplicar lidocaína 5% pasta en la piel por encima del lugar designado para la cirugía durante 10 minutos, luego quitar la lidocaína.
NOTA: Consulta un atlas cerebral adecuado para dirigirte a la región cerebral específica. - Usando un bisturí estéril de 15 cuchillas, retire la piel por encima del cráneo en la región del implante.
- Usando un taladro dental con brocas de 0,7 mm, taladre 4 agujeros en el cráneo. Inserte un tornillo de 1 mm (3 mm de largo) en cada orificio y aplique pegamento de cianoacrilato en los orificios justo antes de insertar el tornillo.
- Usando un burnisher dental, aplique cemento dental en los tornillos y en la periferia del cráneo expuesto.
- Usando el taladro dental, haga un agujero de 5 mm de diámetro en el cráneo por encima de la región cerebral de interés. Retire el tejido graso entre el cráneo y el cerebro y exponga el objetivo de la región cerebral usando pinzas finas y papel de tejido blando. Tenga cuidado de no dañar los vasos sanguíneos grandes debajo del cráneo.
NOTA: Al final de esta etapa, el pez está preparado para implantar la sonda. Aquí solo se describen los pasos principales específicos de este protocolo. Varios procedimientos postoperatorios (como documentación detallada sobre la salud del animal y la esterilización de las herramientas y el área de la cirugía) no se presentan ni discuten porque son aplicables a todas las cirugías con peces o animales pequeños.
7. Implantación de la sonda
NOTA: Para completar el paso final en el protocolo, se necesita un manipulador que pueda mantener el implante en su lugar mientras se inserta en el cerebro.
- Utilice el manipulador para sujetar la cubierta de la caja registradora con los tetódes apuntando hacia el cerebro de los peces.
- Doblar el electrodo de referencia de tal forma que cuando los tetrodes se bajan en el cerebro, la referencia permanece fuera del cerebro.
- Corta los jardines de tal forma que encajen en el cráneo. Opcionalmente, conecte un cable de tierra a uno de los tornillos del cráneo.
- Baje el implante de tal forma que los electrodos se inserten en el cerebro mientras que la parte inferior de la carcasa de microunidad está cerca del cráneo.
- Comience a unir el implante al cráneo aplicando una pequeña cantidad de cemento dental entre la carcasa y el tornillo craneal más cercano.
- Después de que se cure la primera parte del cemento dental, aplique cemento dental y cierre el agujero por encima del cráneo y todo el cráneo expuesto.
NOTA: Por lo general, se necesitan varias rondas de aplicaciones de cemento dental para cubrir todo el cráneo expuesto. - Instale el registrador y la batería en la caja y selle la caja con todos los tornillos.
- Aplicar antibióticos y analgésicos locales según el tipo de pescado utilizado para los experimentos.
- Enjuague las branquias del pez con agua dulce hasta que el pez comience a despertarse. Retire el pescado del soporte y colóquelo de nuevo en su tanque de origen.
NOTA: El pez se recupera completamente dentro de los 60 minutos después de la cirugía. - Asegúrese de que el pez es capaz de nadar libremente con el implante(Figura 3, Vídeo Suplementario 1). Si es necesario, reajuste el tamaño de la espuma de poliestireno extruido por encima de la caja del registrador de modo que el pez pueda equilibrarse fácilmente.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Durante una sesión de grabación, el pez dorado nadó libremente en un tanque de agua cuadrado mientras se registraba la actividad neuronal en su telencéfalo. El objetivo de estos experimentos era estudiar cómo la actividad neuronal de las células individuales determina el comportamiento del pez. Para ello, es necesario identificar la actividad de punción en los datos registrados. La actividad cerebral, mientras se registraba, fue digitalizada a 31.250 Hz y la paso alta filtrada a 300 Hz por el registrador de datos. Luego, sin conexión, se aplicó un filtro de paso de banda (300 a 5.000 Hz) a las señales, y los datos sin procesar presitados se separaron en los canales de cada tetrode y en el canal de referencia(Figura 4A). A continuación, se utilizaron algoritmos comunes de clasificación de picos12 para caracterizar la actividad de una sola celda. En primer lugar, cada canal se filtró manualmente por el umbral mínimo de amplitud de pico (en relación con los niveles de ruido de cada canal). Luego, debido a que las puntas de los tetrodes no están en el mismo sitio, y el electrodo de referencia estaba fuera del cerebro, también se filtraron los picos que aparecieron en más de un tetrode o en el canal de referencia. Los datos filtrados se agruparon y filtraron manualmente por forma, longitud, intervalo entre picos (el tiempo entre los potenciales de acción posteriores debe adherirse al período refractario de las neuronas) y por análisis de componentes principales (PCA). En la Figura 4se presentan ejemplos de agrupación en clústeres de celda única frente a clústeres multiunidad y ruido.

Figura 1: Montaje del implante. (A) Microdrive, hecho de un cabezal de pasador, placas de latón y un tornillo. (B) Carcasa microdrive, hecha de una sola placa de latón mediante plegado. (C) Montaje de microunidad realizado con la microunidad (A) y la carcasa (B). (D) La matriz de tetrodes se hizo utilizando EIB-16, dos tetrodes, un electrodo de referencia y terrenos conectados a un conector (véase Tabla de materiales). (E) y (F) El conjunto del implante de microunidad está conectado a la cubierta impermeable de la caja registradora. El conector de ensamblaje de tetrode se encuentra dentro de la caja y los tetrodes están pegados a la microunidad. (G) La base de la caja del registrador donde se encuentran el registrador y la batería. El anillo O alrededor de la base se utiliza para el sellado. (H) Tira de cabezales de pasador macho de una sola fila. Haga clic aquí para ver una versión más grande de esta figura.

Figura 2: Técnica de plegado de la carcasa Microdrive. (A) Comience con una placa de latón de 1 mm de ancho y haga cuatro aberturas. (B) Doblar la parte central del lado hacia adentro. (C) Doblar la parte superior hacia atrás y la parte inferior hacia adentro. (D) Taladre tres orificios de 3 mm en la parte superior. (E) Grabe un semicírculo de 1 mm en la parte inferior. (F) Taladre un agujero de 1 mm en el centro de la parte superior. Haga clic aquí para ver una versión más grande de esta figura.

Figura 3: Grabación de un pez dorado que se comporta libremente. (A) Los tetrodes se implantan en el cerebro de los peces y el conjunto está conectado al cráneo del pez. (B) La caja está sellada con el registrador en su interior. (C-E) Un pez nadando libremente con el montaje después de la cirugía. Haga clic aquí para ver una versión más grande de esta figura.

Figura 4: Resultados representativos. (A) Registro de 0,5 s de largo desde un pez que nada libremente 24 h después de la cirugía. La señal se filtra mediante un filtro de paso de banda (300 a 10.000 Hz). No hay ruido de gran amplitud en el electrodo de referencia, lo que indica una falta de artefactos de movimiento. No hay potencial escindez en el segundo tetroda (canales verdes). Los primeros datos del electrodo se muestran en los canales marrones. Las estrellas azules y rojas indican picos de racimos azules y rojos que se muestran en los paneles B y C, respectivamente. (B) Formas de espiga de dos grupos diferentes de neuronas individuales, registradas a partir del tetrodo 1. (C) Proyección de los tres primeros componentes principales de los datos del primer tetrode de todos los candidatos de pico que cruzaron el umbral. Los clústeres azules y rojos corresponden a formas de púas azules y rojas del panel B. Los puntos grises representan el ruido neuronal o la actividad multiunidad. Haga clic aquí para ver una versión más grande de esta figura.

Vídeo suplementario 1: Patrones de natación: ejemplo de peces dorados un día antes de la cirugía de implantación (izquierda) y un día después (derecha). El video muestra patrones de natación similares, lo que indica que el pez no está impedido por la cirugía. La velocidad de vídeo es x1.8. Haga clic aquí para ver este video (Haga clic con el botón derecho para descargar).

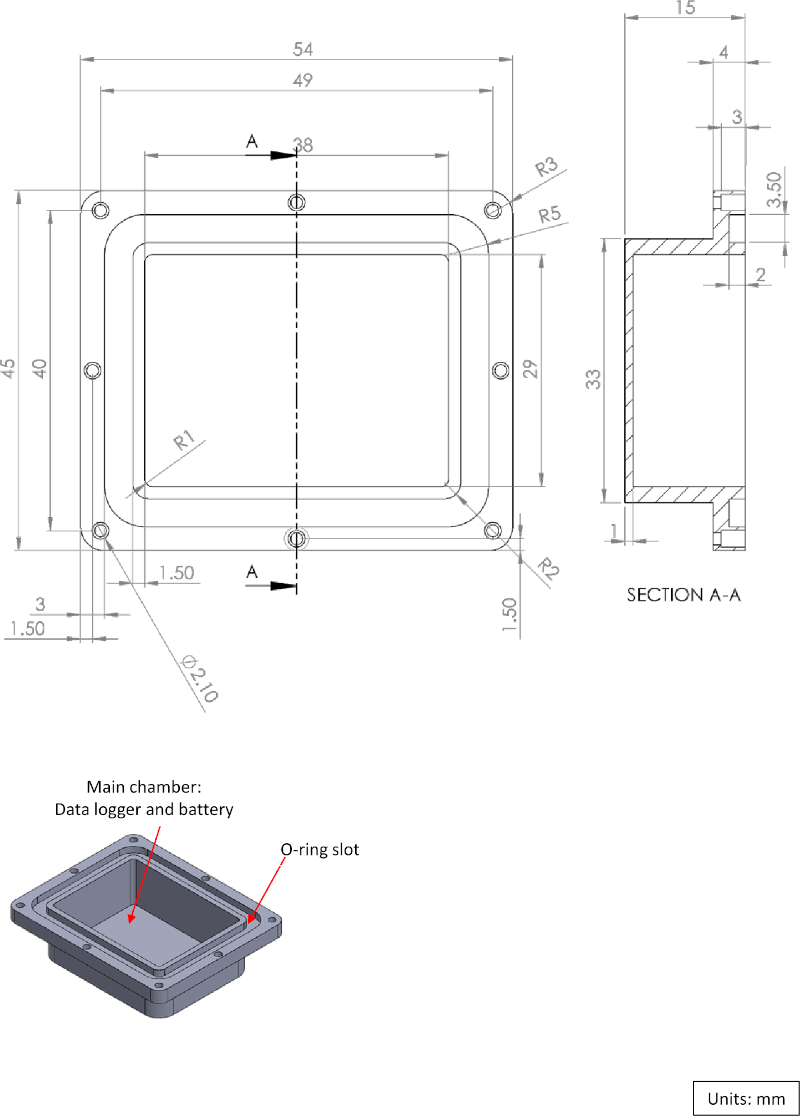
Figura suplementaria 1: Diagrama de la cámara principal de la caja del registrador. Haga clic aquí para ver una versión más grande de esta figura.

Figura suplementaria 2: Diagrama de la cubierta de la caja del registrador. Haga clic aquí para ver una versión más grande de esta figura.

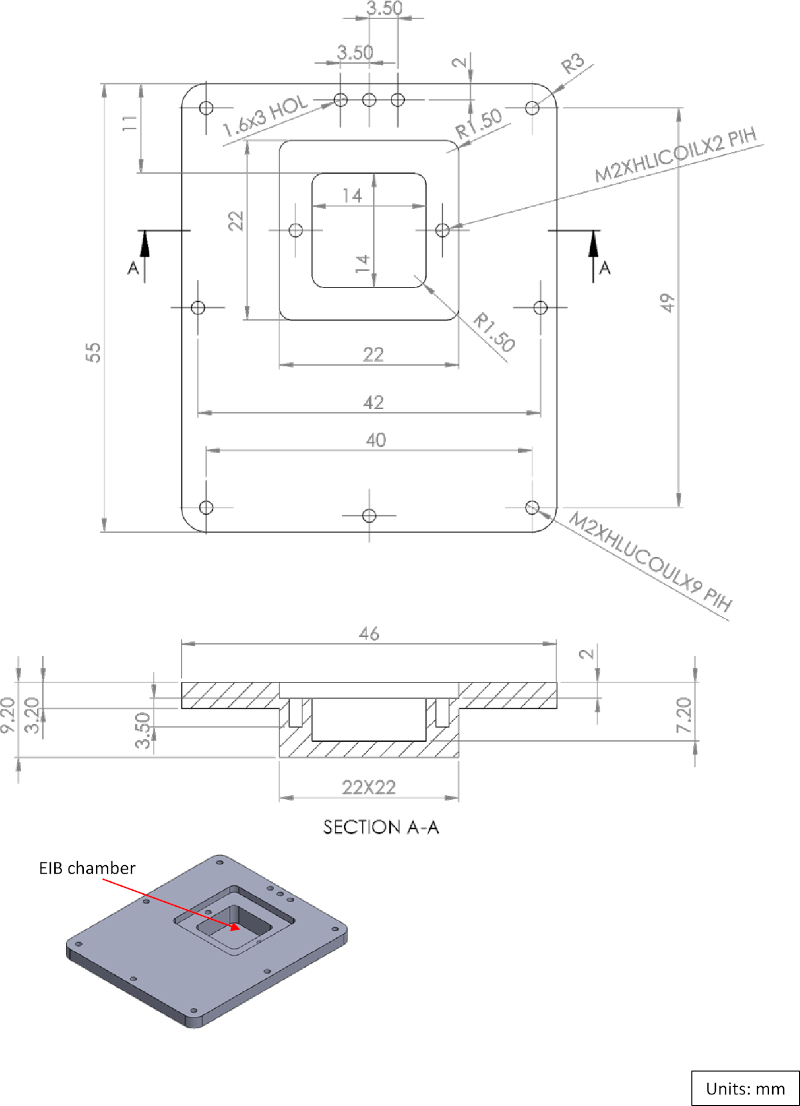
Figura complementaria 3: Diagrama de la cubierta de la cámara EIB-16. Haga clic aquí para ver una versión más grande de esta figura.

Figura suplementaria 4: Diagrama de la placa de latón utilizada para el micromotor. Haga clic aquí para ver una versión más grande de esta figura.
Archivo Suplementario 1: Diagrama de Vivienda. Haga clic aquí para ver este archivo (haga clic con el botón derecho para descargar).
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Este protocolo detalla los pasos involucrados en la implantación de una matriz de tetrodes en el telencéfalo de nadar libremente peces dorados. Esta técnica implementa un registrador neural que amplifica y registra las señales adquiridas de hasta 16 canales junto con una microunidad que puede ajustar la posición del tetrode en el cerebro. La microunidad permite ajustar la posición en el cerebro para optimizar la grabación.
Este protocolo se puede modificar fácilmente para la grabación desde otras regiones cerebrales (ver Vinepinsky et al.8 para la grabación desde el tectum óptico utilizando una técnica similar) o cualquier otro animal acuático de 15 cm de largo o más (aproximadamente igual a un pez dorado cabeza a cola, 100 gramos de peso). Además, el protocolo se puede modificar para trabajar con cualquier registrador de datos siempre y cuando se comunique a una frecuencia que pueda penetrar en el agua. El registrador utilizado aquí se comunica utilizando una frecuencia de radio de 900 MHz y puede comunicarse a través de unos 20 cm de agua. Una frecuencia de radio de 2,4 GHz también puede penetrar a través de 15 cm de agua dulce. Frecuencias más bajas y otras alternativas podrían dar resultados aún mejores13,14,15. El protocolo presentado aquí utilizaba una matriz de dos tetrodas con ocho canales de grabación. Además, el protocolo se puede modificar para incorporar otras geometrías de sonda como una matriz de cables16 o sondas de silicona9.
El uso de un registrador de datos sobre un sistema de grabación de telemetría completo o un sistema atado tiene varias ventajas. En primer lugar, la comunicación inalámbrica añade ruido a la grabación. Por lo tanto, la transmisión completa de los datos reducirá la calidad de la señal. Además, el registro de los datos garantiza que no se pierdan datos si se produce un error en la comunicación. Además, los sistemas inalámbricos permiten que los peces naden libremente, a diferencia de los animales atados. Por último, este protocolo fue desarrollado para registrar potenciales de acción, pero también se puede utilizar para registrar potenciales de campo localestableciendo el filtro analógico de paso alto del registrador en 1 Hz en lugar de 300 Hz. Una desventaja del registrador es la necesidad de descargar físicamente los datos y reemplazar la batería cuando se agota.
La microunidad sugerida en el protocolo aumenta significativamente la probabilidad de registrar la actividad de una sola célula. Sin el dispositivo de micromotor, los tetrodes implantados se colocan aproximadamente en el mismo sitio de grabación en el cerebro durante todo el tiempo que el pez está siendo probado. Esto limita físicamente la probabilidad de registrar múltiples neuronas individuales del mismo pez, y por lo tanto reduce el rendimiento de grabación por pez. El hecho de que el sitio de registro específico en el cerebro sigue siendo desconocido hasta después de la cirugía fortalece la necesidad de un dispositivo móvil que hace posible mover los electrodos en el cerebro después de la fijación, así.
Una característica importante de este protocolo que se omitió para mayor claridad es la determinación de la impedancia del electrodo. La impedancia del electrodo se puede ajustar mediante la selección del diámetro del alambre (es decir, un diámetro más alto conduce a una menor impedancia), la composición del alambre (por ejemplo, tungsteno o nicromo) y el recubrimiento de electrodos (por ejemplo, negro platino para tungsteno y oro para el nicromo) que produce alambres con diámetros más bajos e impedancia más baja. Debido a que todos estos parámetros son críticos para el éxito de las grabaciones neuronales, se recomienda encarecidamente al lector que consulte la vasta literatura sobre este tema, incluyendo Harris et al.17.
Tenga en cuenta la importancia del electrodo de referencia en la detección de posibles fuentes de ruido externas en el sistema. El electrodo de referencia es un electrodo de impedancia relativamente baja que se inserta en el cráneo pero está fuera del cerebro. Debido a que no entra en contacto con el tejido cerebral, registra la firma de la señal, que se compone de ruido térmico, artefactos de movimiento y ruido externo. Las principales fuentes de ruido en este sistema son artefactos de movimiento y ruidos de comunicación que pueden ser controlados y cronometrados por el registrador. Estos ruidos pueden ser fácilmente detectados por la firma que imponen en la señal del electrodo de referencia.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Los autores no tienen nada que revelar.
Acknowledgments
Estamos agradecidos a Nachum Ulanovsky y a los miembros del laboratorio de Ulanovsky por toda su ayuda. Además, estamos agradecidos a Tal Novoplansky-Tzur por la asistencia técnica útil. Agradecemos el apoyo financiero de THE ISRAEL SCIENCE FOUNDATION - FIRST Program (subvención no 281/15), y el Helmsley Charitable Trust a través de la Iniciativa de Robótica Agrícola, Biológica y Cognitiva de la Universidad Ben-Gurion del Negev.
Materials
| Name | Company | Catalog Number | Comments |
| 0.7 mm round drill bits | Compatible with the drill. | ||
| 15 blade Scalpel | Sigma-Aldrich | ||
| 16 channel PCB board | Neurlynx | EIB-16 | |
| 1x3M phillips flat head screws | Stainless steel. Any type. | ||
| 1x3M phillips round head screws | Stainless steel. Any type. | ||
| 27 cm x 19 cm x 1 mm brass plate | See Figure 2 | ||
| 2x6M phillips flat head screws | Stainless steel. Any type. | ||
| 3140 RTV coating | Dow Crowning | 2767996 | |
| 75 µm Silver wire | A-M Systems | ||
| Brass machine screws #00-90 | 947-1006 | ||
| Brass plates 7.5 mm x 2.5 mm x 0.6 mm | A 3D drawing is provided. See supplementary 1 | ||
| Coated Tungsten wire 25µm | California Fine Wire Company | 5000160 | Depending on the appication the tetrodes can be fabricated from any type of wire. Popular wires are nicrome wires that can be found with lower diameters (eg. A-M systems, 762000) |
| Coated Tungsten wire 50 µm | A-M Systems | 795500 | Can be replaced with any other wire with low impedance |
| Cyanoacrilic glue | |||
| Dental Burnisher | ComDent UK | Any small sterille stainless-still tool will do. | |
| Dental cement - GCFujiPLUS | GC | 431011 | Other dental cements would probably will work as well although we have never tried any other. |
| Dental drill or nail polish drill | Dental drills are expensive, a nail polish drill can be a cheap replacement. | ||
| Drill bit #65 | 947-65 | ||
| Fast curing epoxy | Any 5 min curing epoxy can be used here. | ||
| Logger box with O-ring sealing | A 3D drawing is provided. See supplementary 1-3. The box should be machine fabricated (do not use 3D printers). Use transperant material, to be able to see the indicator LEDs on the logger. | ||
| Motorized turning device | Custom made as described in "open ephys" website. Can also be purchusaed from neurolynx ("Tetrode Spinner 2.0") or bulit by other means. | ||
| Mouselog-16 Neural logger | Deuteron Technologies Ltd | There are several neural loggers available on the market, including: SpikeGadget (UH32 32channels) and Neurologger 2/2A/2B of Alexei Vyssotski. It should be noted that weight is not a major contraint since it can be counterbalanced with floating Styrofoam | |
| MS-222 | Sigma Aldrich | E10521 | Ethtl 3-aminobenzoate methanesulfonate 98% |
| Nano-Z plating | White Matter LLC | The nano-Z can be bought from several supllieres. Any impedance meter can be used, e.g. IMP-1 / 6662 / 2788, BAK Electronics. | |
| PCB pins | Neurlynx | Neuralynx EIB Pins | |
| Polymide tubing 250 µm | A-M Systems | 822000 | |
| Rechargable battery | 3.7 Lipo battery, 370 mAh. Holds about 6 hours of recording. Smaller or larger battries can be used to reduce the weight or extend recording time. | ||
| Silicone tubing 0.64 mm | A-M Systems | 806100 | |
| Stainless steel 1.5 mm | A-M Systems | 846000 | |
| Sudium Bicarbonate | Sigma Aldrich | S9625 | |
| Tap #00-90 | 947-1301 | ||
| Vaseline | Any type of soft petroleum skin protectant can be used here. |
References
- Jacobson, M., Gaze, R. M. Types of visual response from single units in the optic tectum and optic nerve of the goldfish. Quarterly Journal of Experimental Physiology and Cognate Medical Sciences. 49 (2), 199-209 (1964).
- Ben-Tov, M., Donchin, O., Ben-Shahar, O., Segev, R. Pop-out in visual search of moving targets in the archer fish. Nature Communications. 6, 6476 (2015).
- Zottoli, S. J. Correlation of the startle reflex and Mauthner cell auditory responses in unrestrained goldfish. Journal of Experimental Biology. 66 (1), 243-254 (1977).
- Canfield, J. G., Rose, G. J. Activation of Mauthner neurons during prey capture. Journal of Comparative Physiology A. 172 (5), 611-618 (1993).
- Canfield, J. G., Mizumori, S. J. Methods for chronic neural recording in the telencephalon of freely behaving fish. Journal of Neuroscience Methods. 133 (1-2), 127-134 (2004).
- Orger, M. B., de Polavieja, G. G. Zebrafish behavior: opportunities and challenges. Annual Review of Neuroscience. 40, 125-147 (2017).
- Vanwalleghem, G. C., Ahrens, M. B., Scott, E. K. Integrative whole-brain neuroscience in larval zebrafish. Current Opinion in Neurobiology. 50, 136-145 (2018).
- Vinepinsky, E., Donchin, O., Segev, R. Wireless electrophysiology of the brain of freely swimming goldfish. Journal of Neuroscience Methods. 278, 76-86 (2017).
- Vandecasteele, M., et al. Large-scale recording of neurons by movable silicon probes in behaving rodents. JoVE (Journal of Visualized Experiments). (61), e3568 (2012).
- Ferguson, J. E., Boldt, C., Redish, A. D. Creating low-impedance tetrodes by electroplating with additives. Sensors and Actuators A: Physical. 156 (2), 388-393 (2009).
- Arcot Desai, S., Rolston, J. D., Guo, L., Potter, S. M. Improving impedance of implantable microwire multi-electrode arrays by ultrasonic electroplating of durable platinum black. Frontiers in Neuroengineering. 3, 5 (2010).
- Lewicki, M. S. A review of methods for spike sorting: the detection and classification of neural action potentials. Network: Computation in Neural Systems. 9 (4), R53-R78 (1998).
- Teixeira, F. B., Freitas, P., Pessoa, L. M., Campos, R. L., Ricardo, M. Evaluation of IEEE 802.11 underwater networks operating at 700 MHz, 2.4 GHz and 5 GHz. Proceedings of the 10th International Conference on Underwater Networks & Systems. , Arlington, VA. (2015).
- Sendra, S., Lloret, J., Rodrigues, J. J., Aguiar, J. M. Underwater wireless communications in freshwater at 2.4 GHz. IEEE Communications Letters. 17 (9), 1794-1797 (2013).
- Lloret, J., Sendra, S., Ardid, M., Rodrigues, J. J. Underwater wireless sensor communications in the 2.4 GHz ISM frequency band. Sensors. 12 (4), 4237-4264 (2012).
- Hoogerwerf, A. C., Wise, K. D. A three-dimensional microelectrode array for chronic neural recording. IEEE Transactions on Biomedical Engineering. 41 (12), 1136-1146 (1994).
- Harris, K. D., Quiroga, R. Q., Freeman, J., Smith, S. L. Improving data quality in neuronal population recordings. Nature Neuroscience. 19 (9), 1165 (2016).

{kind=link}
{kind=link}
{kind=link}
{kind=link}