

Summary
로코는 종종 같은 신경 과학 및 정형 외과 등의 분야에서 질병의 다양한 모델의 행동 결과로 심사합니다. 이 비디오 종이가 억제 운동 중에 쥐가에서 지상 반응 병력 및 운동학를 수집하는 방법을 설명하는 계획이다.
Abstract
문제는 그 광범위한 정의에 physiologic 프로세스의 모터 발현으로 정의할 수 있습니다. 따라서, 모든 행동은 모터 시스템을 통해 명단. 신경 과학 및 정형 외과 분야에서, 운동은 질병 모델의 다양한 일반적으로 평가 행동입니다. 예를 들어, 신경계에 충격 부상 후 전위의 회복 1-3 가장 일반적으로 평가 행동 중 하나입니다. 운동은 종점 측정 다양한 (운전하는 작업 등 전체로 이동 예 : 시간), semiquantitative 동점 조치 (예 : 순서 평가 척도 (예 : 바소 비티와 브레스 나한의 운동력이있는 사람 (BBB) 평가 척도 등)) 및 대리자를 사용하여 평가할 수 있지만 행동 조치 (예 : 근육 힘, 신경 전도 속도 등) 단 운동 (힘 측정) 및 운동학은 (공간에서 몸 세그먼트의 측정) 동물 1 locomote 수 있습니다하는 전략에 대한 자세한 설명을 제공합니다. 비록 locomoting 설치류 아니다 새로운 운동학 및 운동 측정은 이제 더 쉽게 접근으로 인해 이러한 목적을위한 상용 장비의 가용성이다. 중요한 것은, 그러나 경험은 biomechanical 분석 이론 매우 친숙하고 사전에 상대적으로 노동 집약적인 학습이 될 것이다 무엇에 착수하기 위해 분석 이러한 형태의 장점과 한계를 이해해야합니다. 현재 신문은 상용 장비를 사용하는 동적 및 지상 반력 데이터를 수집하는 방법을 설명하는 것을 목표로하고있다. 장비 및 설정 장치의 세부 사항은, 동물, 포함 및 허용 실행의 제외 기준 및 데이터를 수집을위한 방법의 사전 교육이 설명되어 있습니다. 우리는 스트레인 일치하는 젊은 성인, 중년과 노인 쥐의 운동학 및 속도론을 설명하여이 행동 분석 기술의 유틸리티를 설명합니다.
Protocol
1. Biomechanical 로코 모션 분석을위한 사전 requisites
이전 비싼 전위의 분석 장비를 구입에 착수하고, 운동학 및 / 또는 운동 전위의 평가가 이루어집니다 실험을 계획하기 위해서는 sensorimotor의 행동, 동물의 operant 에어컨, 실험자들이 biomechanical 분석의 기술 및 실용적인 측면을 잘 알고있는 것이 필수적입니다 및 처리 / 저장 / 디지털 대량의 데이터를 관리. 이러한 사전 requisites 많은 듯이 보이지만, 그것은 연수생들이 비교적 상세 전위의 분석을 수행하는 기술 및 실용적인 복잡성을 실현 실험 이러한 유형에 따라 착수 이후입니다. 저자들이 경험이 소개 biomechanics 다루는 과정에 등록할 것을 권장합니다, 잘 알고 있어야하거나 데이터 관리에 필요한 프로그래밍 언어에 익숙한 사람을 고용하고, 동등한 중요성의 실질적인 시간 상호 작용, 처리하고, 실험실 동물 작업을 보냅니다. neurosciences의 운동 분석 및 sensorimotor 행동 분석을 이해, 경험 (1 참조, 4-7) 몇 가지 중요한 참조라고합니다.
2. 운동학 및 운동 시험 장치
양국 데이터를 수집하는 데 유용 운동학 및 운동 테스트 장치는, 다음과 같은 구성 요소 (자세한 내용은 "특정 시약 및 장비의 표"참조)으로 구성됩니다 :
- 조용하고 충분한 크기의 객실 (필요하지 않게 방음,하지만 트래픽이 낮은 지역에 위치)
- 동물 방 밖에서 혼란 소음을 제한하는 배경 "잡음"을 공급하는 라디오
- 사각형 구멍 (11cm X 11cm) 맑은 플렉시 글라스, 동봉, 평면 표면 활주로 (180cm X 길이 20cm 폭 60cm X 높이) 중 하순부터 등거리 활주로의 중심에 위치한
- plexi - 유리 (10.5 cm X 10.5 cm)의 조각
- 양면 접착 스카치 테이프
- 피부 마커를위한 3M 반사 접착제 테이프
- 피부 마커를 생성하는 홀 펀치
- Isofluorane의 마취 기계는 피부 마커 배치하기 전에 면도를위한 anesthetizing 동물에 필요한
- 활주로의 길이를 따라 동물의 장려 운동에 대한 치리
- AMTI HE6X6 forceplate
- Vicon Motus 맞춤 시스템 (소프트웨어, 컴퓨터 등)
- 적절한 커넥터 케이블 4 개 비디오 카메라 (적어도 60 Hz에서 샘플링)과 삼각대
- 4 카메라 마운트의 할로겐 불빛이 동물 피사체의 조명에 대한 최적의 조명과 반사 피부 마커를 제공합니다
- 적절한 크기의 교정 프레임이나 의미있는 거리 측정에 X, Y, Z의 위치를 보정하기 위해 Vicon Motus 시스템에 필요한 볼륨
3. 동물 교육
이전 데이터를 수집, 각 동물은 평면 표면 동봉된 활주로를 건너 훈련해야합니다. 적절한 동물 공급 업체에서 쥐를 접수하는 즉시, 동물은 1 주일 동안 그들의 새로운 가정에 acclimated해야합니다. 이 acclimation 시간 동안 여러 치리는 쥐의 케이지에 매일 게재됩니다. 동물 비만을 방지하고이 작업을 수행하는 동기를 보장하기 위해 유지 보수의 에너지 요구에 제한 식품입니다. 이후, 각 동물은 1 주일 동안 매일 10~15분에 대한 실험자에 의해 처리됩니다. 같은 기간 동안, 각 동물은 양쪽 끝에있는 치리와 함께 활주로에 배치됩니다. 동물들이 환경에 익숙한되고 나면, 그들은 치리을 먹고 시작합니다. 동물이 활주로 내에서 편안하고 먹는 치리되면, 실험자들은 operantly 조건 식품 보상을위한 활주로의 길이를 실행할 수있는 동물을 다음해야합니다. 이것은 쥐의이 위치는 활주로의 반대 끝에 ¼ 잘있어 던지기에 의해 수행됩니다. 쥐의이 잘있어을 먹고 나면 다른 ¼의 잘있어은 활주로의 다른 끝에 배치됩니다. 이것은 일정한 속도로 활주로를 따라 일관되게 밀고 (토스의> 90 %) 이동까지 매일 15-20분에 대해 이루어집니다 갤로핑 / 경계없이 잘있어 먹고 (예없이 중지 탐험, 또는 게이트를 변경하지 않고, 시작) . 쥐는 트로팅 보행을 고용해야합니다. 이 작업을하기 위해 동물의 이상 - 에어컨이 급속도 이러한 게이츠가> 90cm / s의 여행 동물의 지표 아르 경계 동물을 초래할 수 전철과 게이츠를 갤로핑, biomechanically, 다양한 이유로 (예 : 다리 리드 포함 기준 등)에 대한 해석보다 어렵습니다. 우리의 경험에서는, 일단 쥐 일관 게이츠 갤로핑 또는 경계 고용, 그것은 활주로에 locomoting 동안 그들 트로팅 게이트를 사용해야하기 어려운이 아니라면 불가능합니다. 동물 주변이나 중추 신경계 손상으로 고통 이후 판매율> 90cm / s 이상은 거의 본 적이 있습니다. 성공적인 훈련에 도달하는 시간은 바리아입니다쥐의 변종과 남녀 간의 경. 위스타, 루이스, 롱 - 에반스, 그리고 스프 라그 - 돌리 계통 지속적으로 훈련 8 발병로부터 2 주 이내에 활주로를 통과하실 수 있습니다. 우리의 경험에서 피셔 (F - 344) 쥐이 작업 8 배울 4-6주의 이상을하는 경향이 있습니다.
4. 마킹 공동 위치
Forelimb 동점 분석 인해 웅크리고 자세 9가 쥐 같은 수종의 악화있는 앞발, 피부에 마커를 배치하여 부과 피부 운동 유물을 신뢰할 수 있습니다. 대신, 앞발의 운동학은 x - 선 촬영이나 fluoroscopy 10-13을 사용하여 달성해야합니다. 등, 뒷다리 공동 위치 마커 배치는 여기 설명되어 있습니다.
이전 데이터 수집하려면 각 만한게 적절한 inhalational 마취 (예 : isofluorane, 1.5-2 %가 정밀 vaporizor에 다이얼)와 얼굴을 마스크를 통해 산소 관리, 주요 지형 해부를 사용하여 데이터 수집을 사전에 최소 24 시간 anesthetized되어야합니다 랜드마크가 표시되어야합니다. 절차의 간결 감안할 때, 그리고 긴 행동 마취 에이전트를 사용하지 않기 때문에, 동물의 체온을 유지하는 데 사용할 필요가 없습니다 동물 온난 장치의 사용합니다. 동물 anesthetized되면, 장골의의 너머의 수준에 뒷다리 팔다리와 dorsum는 면도 있습니다. 동물은 다음 흉골 드러누움에 배치이며 hindlimbs 그것을 지원하기 위해 기업 포장 거품을 사용하여 약 서 위치에 배치됩니다. 장골의의 너머의 두개골의 대부분의 부분을 overlying 피부는, 대퇴골, 측면 tibial tuberosity, tarsal 공동, 그리고 5 번째 metatarsal의 말초 및 측면의 큰 trochanter은 무독성 영구 마커로 표시됩니다. 동물은 마취에서 회복됩니다. 세속적인 연구, 정기적인 마취가 hindlimbs이를 허락 후속 반사 마커 배치 (아래 참조)을 면도해야 할 수 있습니다. 또한, 일일 이전에 표시된 해부 랜드마크 (같은 무독성 마커를 사용)의 강조는 쥐 천천히 자연 미용 행동으로 마커를 제거하므로 필요합니다.
5. 데이터 레코딩
모든 카메라의 전망들은 위치가 적절하고보기 같은 분야를 캡처되었는지 확인하는 검사입니다. 각 카메라는 서로 약 60-80도 정도에 위치해야합니다. 보기의 필드는 중앙에 forceplate 두 진보를 캡처하는 충분한 활주로의 길이를 포함해야합니다.
교정 볼륨은 활주로의 미리 정해진 영역 내의 위치입니다. 카메라의 각 활주로 내에 보정 볼륨의 싱글 프레임, 캡처합니다. 기둥의 각각의 길이를 따라 모든 보정 마르크는 디지털입니다. 한 번만 디지털화에 만족 오류가 운전하는 데이터를 수집하기 위해 진행 실험자이 수 수행됩니다. 이 보정 단계는 이전 데이터 수집하는 것이 중요합니다. 교정이 정확하게 수행되지 않을 경우, 또는 교정 전에 녹음 세션에 즉시 발생하지 않는 경우, 모든 결과 데이터가 정확하고 사용할 수 있습니다. 중요한 것은 카메라의 다친다거나 이동하는 경우, 그것은 시스템의 보정은 반복해야 가정 안전합니다.
바로 전에 활주로에 동물을 배치하는 원뿔 반사 피부 마커를 (3M 반사 테이프를 사용하여 테이블을 참조), 그 무게가 기록되고 미리 만든이 뒷다리 지형 명소에 만들어진 미리 정해진 느낌이 자국을 준수하고 있습니다. 한 소원이 그룹간에 비교를 할 경우 중요한 부분 - 동물의 체중을 기록하는 것은 체중을 접지 반응 세력의 회고 정상화를 허용합니다. 또한, 체중 측정은 실험 기간 동안 동물의 전반적인 건강의 모니터링을 용이하게합니다. 마커 배치는 적절한 동물 처리가 필요하며 동물의 마취가 필요하지 않습니다. 반사 테이프에 접착제가 동물의 피부에 준수 부족한 경우, 무독성 접착제의 매우 작은 금액 (예 : 3M VetBond 조직 접착제)는 동물의 시체에있는 마커의 이행을 촉진하는 데 사용할 수 있습니다. 마커가 hindlimbs에 배치되면, 실험자는 컴퓨터의 키보드 근처에 편안하게 위치 및 직접 Vicon Motus 시스템을 통해 연결된 이벤트 마커를 가지고 있어야합니다. 템플릿으로 보정된 파일을 사용하여 여러 파일을 기록 미리 만들어집니다. 일반적으로 25-30 파일은 저장해야합니다. 각 파일은 고유 이름이 있어야합니다. 각 파일 하나가 기록되는 동물의 실행 기록 나타내는 것입니다. 30 파일 스물 다섯이 포함 기준 속도 (예 : 60-90센티미터 / s의)를 회의 운영의 충분한 번호가 수집되는 것을 보장하기 위해 필요합니다. 파일의 충분한 숫자가 생성 후 실험자 데이터를 수집 시작할 수 있습니다. Experimenter은 활주로의 양쪽 끝에 치리의 ¼ 조각 던져하여 활주로 내에 셔틀 쥐를 프롬프트합니다. 조심 조정과 타이밍으로 이벤트 마커는 개시에서 발생하고 있으며 성공적으로 활주로에 따라 패스를 완료 쥐 완성 직전. 추적 원유 지상 반력을 검토 후에하고, 왼쪽 또는 오른쪽 팔다리가 강제 판에 충돌 여부를 기록 후, 파일이 저장되고 닫힙니다. 왼쪽 및 오른쪽 사지 forceplate 히트 동등한 번호를 기록해야합니다. 실행의 충분한 숫자가 기록된 때까지 해당 실행에서 데이터를 기록하는 과정이 반복됩니다.
6. 데이터 분석
운동학 및 접지 반응 군에 대한 데이터 수집을 완료되면, 모든 동물에서 각 실행 속도에 대한 평가해야합니다. 이 상대적으로 고정 마커 (iliums의 예 : 날개)를 사용하여 하나는 마커 (Vicon Motus 파일 서식 파일을 만들 때 이전 완료) 사이에 가상 지점을 평가할 수 있습니다. 이 "가상"지점의 속도를 계산하기 전에, 장골의 표시에 대한 마커 디지털해야합니다. Vicon motus 소프트웨어, X - 방향 (운동의 수평 방향)에서이 가상 지점의 속도를 사용하는 것은 계산됩니다. 이렇게에서, 단지 최종 분석에 사용되는 (사전 결정) 주어진 범위 내에서 속도를 실행합니다. 우리는 60-90cm / s의 사이에 이동하는 동물들이 일관성 트로팅 게이츠를 사용하는 것을 발견했습니다. 10 실행의 최소 (왼쪽 수족이 강제 플랫폼과 접촉을하게하고 오른쪽 사지가 무력 플랫폼과 접촉을하게 어디에 5 실행 5 실행)가 필요합니다. 허용 실행 각 동물 식별되면, 나머지 피부 마커의 디지털화는 완료해야합니다.
, 무릎 이상의 피부 운동 유물에 대한 보상하기 위해 무릎 위치 추정이 측량을 (두 동아리 2D 운동학 사이의 교차점, 또는 2 차원 운동학 분야 사이의 교차로)를 사용하여 계산됩니다로는 이전에 설명되었습니다. 엉덩이, 무릎, 그리고 호크 공동 각도, 판매율 및 가속 이제 결정하실 수 있습니다. 그들의 정확성이 고용되고있는 카메라의 샘플링 속도에 따라 제한에도 불구하고 자세와 스윙 시간도 평가할 수있다. 이들 및 기타 계산은 Vicon Motus KineCalc 소프트웨어, 또는 데이터가 ASCII 데이터로 수출과 같은 MatLab과 같은 소프트웨어의 사용자 정의 루틴을 사용하여 분석할 수를 사용하여 (수출하지 않고 IE) 직접 수행할 수 있습니다.
그라운드 반력 데이터 측정 및 증폭 AMTI 포스 플랫폼에서와 Vicon Motus로 1200 Hz에서에서 수집됩니다. 따라서, 일단 지상 반력 데이터는 적절한 디지털 필터 Vicon의 Motus를 사용하여 데이터에 적용되어 수집됩니다. 실험자 이미 적절한 피부 마커, 동점 데이터로 동시에 수집했습니다 지상 반력 데이터가, 다른 사용자 정의 소프트웨어를 사용하는 직접 또는 간접적으로 Vicon Motus KineCalc를 사용하여 분석할 수 디지털화 이후 여행 및 식별 허용 실행의 속도를 결정했다고 감안할 때 일상. 군대에 대한 변수의 다양한, 세 직교 방향 각각에서 계산하실 수 있습니다. 이러한 변수는 최대 힘, 지역 깨물어 곡선 (즉 충동), 등 중요한 것은, 그러나 실험자 따로 각 동물의 각 실행에 대해 좌우 사지 데이터를 보관해야합니다. 포함 오른쪽 또는 왼쪽 팔다리에서 추출된 데이터는 각 동물에 대한 평균과 그 동물을위한 대표적인 데이터로 사용됩니다. 데이터는 적절한 절차를 사용하여 통계 분석입니다.
7. 대표 결과
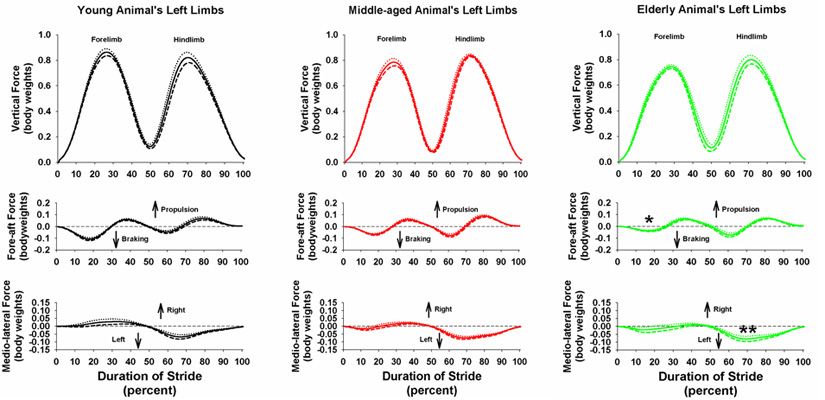
전위의 분석이 양식의 유틸리티를 대표하는, 운동학 및지면 반응 세력은 젊은 중년과 노인 여성 위스타 쥐에 대한 결정됩니다. 이 분석에서 연령 관련 차이점은 여성 위스타 쥐를 찾을 수 있었다. 특히, 지상 반력 분석 노인 쥐가 forelimb 제동 능력을 감소하고 동물의 다른 그룹 (그림 1)에 비해 측면 안정화 위해 hindlimbs 이상을 사용하는 경향이 있다고 설명합니다. 동점 분석, 각 그룹 사이에 통계적 차이를 공개하지만 운동학은 쉽게 암흑의 거의 모든 연령 (그림 2)에서 기록될 수 보여줍하지 않았다.

그림 1 그라운드 반력이 젊은이의 왼쪽 팔다리에서 가져온 추적. (24 개월, N = 5) 및 노인 (4 달이 넘은,, N = 7), 중년 (N = 7 13~14개월 세) 여성 위스타 쥐. 오른쪽 팔다리 비슷한되었습니다. 그것은 노인 쥐가 젊은 중년 쥐에 비해 제동 (* = P <0.05)에 대해 덜 자신의 앞발을 사용하고, 노인 쥐 젊은 쥐에 비해 측면 안정화 위해 hindlimbs 이상을 사용하는 경향이 그 즉시 분명합니다 (**). 솔리드 라인 그러니까, 점선 뜻 + SE를 나타냅니다 대표, 그랬어요라인 SE 의미 나타냅니다. 큰 그림을 보시려면 여기를 클릭하십시오.

그림 2. 젊은 중년과 노인 쥐의 왼쪽 사지에 대한 동점 삐쩍 말라. 스틱 그림은 그룹의 각 왼쪽 사지의 의미 움직임을 나타냅니다. 스텝주기 동안 공동 각도에 대한 동물의 그룹 사이에 큰 차이가 없었다 것은. 큰 그림을 보시려면 여기를 클릭하십시오.
Discussion
현재 신문은 지속적인 양적 운동학 및지면 반력 결정을 사용하는 운동을 평가하기위한 방법론을 제공합니다. 이 방법론에 따라 착수에 관심이 누구를위한 중요한 운동의 biomechanics, 동물 sensorimotor 동작 및 데이터 관리와 조작에 강한 배경이다. 운동학 및지면 반력의 결정은 전위의 분석 (예 : 종점 조치 순서 평가 척도)의 다른 형태에 비해 추가적인 시간과 전문 지식을 필요로하지만, 얻은 데이터는 정형 외과 14-22과 neurologic의 다양한 민감한, 객관적이고 정량이다 인류의 다양한 질병의 1-3, 23-32 모델.
우리는 간단하고 덜 중요한 조치를 사용 gleaned 수 없습니다 스트레인 일치하는 쥐 정보의 다양한 세 사이의 운동의 차이를 설명하는 데이터를 제공하고 있습니다. 또한, 운동의 운동학 및 운동 분석 평가의 다른 형태가 실패 될 신경계 조건의 다양한 전위의 변경을 설명하는 데 사용되었습니다. 잠재력 therapeutants을 평가할 때 중요한 조치의 8, 23-25, 27 사용 특히 중요 해집니다 질병의 다양한 모델. 테스트 실험자가 타입 - II 통계 오류를 범한의 위험을 실행하는 잠재적인 therapeutant의 효과를 분별 정도로 구분하지 않으면 (사실에 효과가 있었을 때 즉, 결론이 치료에 대한 효과가 없다). 또한, 종점 측정하고 운동을 평가하는 더 주관적인 테스트를하기 때문에, 편견의 가능성을가 존재합니다. 운동학 및 운동 평가가 적절 포함 / 제외 기준이 선험 만들어 제공한다는 점에서 순수한 목적은, 실험자 단순히 수집, 검사하고 데이터 (즉, 데이터 결정에 아무런 주관적인 구성 요소가 없습니다)에 해당하는 통계를 적용합니다.
운동학 및 운동 분석은 또한 인류의 수많은 사용할 수있는 능력을 내실수가 있었죠. 사실, 운동학, 지상 반력 결정, 또는 둘 모두가 같은 코끼리 33-35, 소 36, 37-40 마리, 개 4, 41-45, 고양이 21, 46-49, 각종 같은 종의 다양한에서 사용되었습니다 설치류 3, 8, 50, 51, 조류 4, 52-55, 생선 56, 57 (이 목록은 완전한 의미없이하는 것입니다.) 저자의 경험에서, 그러나 생쥐의 사용은 생쥐가 활주로를 따라 여행을 operantly 상태로 쉽지 않은 점을 감안할 때 문제가됩니다. 활주로를 선법 때 감안할 때, 마우스는 비교적 일정한 속도로 여행하고 그 대신 속도 업과 느린 다운되지 않습니다. 지상 반력 결정을위한 실험 장치는 러닝 머신 사용에 대한 수정하는 경우이 문제는 가능성이, 부분, 러닝 머신과 비디오 녹화 러닝 머신에있는 동물 locomoting합니다. 58 생쥐를 실행하여 극복할 수있는, 지상 반력 결정 겠지 러닝 머신 벨트는 포어 - 후미에와 메디오 - 측면 강제 결정에 영향을 마찬가지로 가능성만을 쉽게 수직 접지 반력에 대해 얻을 수 있습니다.
모두, 운동의 운동학 및 운동 분석은 정형 외과와 neurologic 조건의 다양한 모델에 대한 고용 수있는, 신뢰할 수있는 민감한, 그리고 객관적인 방법입니다. 또한, 장비의 모든 따라서 sensorimotor 행동 분석의이 양식을 수행하지 어떠한 관련 이유를 negating, 설치류에서 사용할되었다.
Disclosures
관심 없음 충돌 선언하지 않습니다.
Acknowledgments
이 연구는 자연 과학 및 캐나다의 공학 연구 협의회에서 AAW에 디스커버리 그랜트에 의해 지원되었다.
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J.
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M.
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R.
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}