

Summary
運動は、多くの場合、神経科学、整形外科などの分野における疾患の様々なモデルの行動の結果として検査される。このビデオのホワイトペーパーでは、気ままな歩行時のラットから床反力と運動学を収集する方法を説明する予定です。
Abstract
動作は、その最も広い定義では、生理学的プロセスの運動徴候として定義することができます。このように、すべての動作は、モーターのシステムを介して現れる。神経科学と整形外科の分野では、運動は疾患モデルの様々な一般的に評価された動作です。例えば、神経系への外傷性損傷後の運動回復は1-3最も一般的に評価行動の一つです。運動は、エンドポイントの測定(自発運動タスクの完了にかかった例:時間、など)、半定量的運動学的対策(例:序評価尺度(例えばバッソビーティーとブレスナハンの運動(BBB)評価スケールなど))とサロゲートのさまざまな方法を使って評価することができますが行動の措置(例えば、筋力、神経伝導速度、など)、唯一の動力学(力の測定値)と運動学は、(スペースで身 体セグメントの測定値)動物が1を動き回ることができるとなることで戦略の詳細な説明を提供しています。 locomotingげっ歯類のではないが、新たな運動学および動力学的測定がより容易にアクセスできるため、この目的のために設計された市販の機器の可用性になります。重要なのは、しかし、実験者は、生体力学的分析の理論と非常に精通していると、比較的労働集約的な研究となるものに着手する前に分析のこれらの形態の利点と限界を理解する必要があります。本論文では、市販の機器を用いて運動学と地面反力のデータを収集する方法を記述することを目的とする。機器の詳細や装置のセットアップ、許容可能な実行の動物、包含と除外基準の事前トレーニング、およびデータを収集するための方法が説明されています。我々は、ひずみを一致させた若い成人、中年、そして老人ラットの運動学と動力学を記述することにより、この行動分析の手法の有用性を示しています。
Protocol
1。生体力学的歩行解析のための前提条件
前の高価な運動の解析装置を購入に着手し、運動学および/または運動運動の評価が実行される実験を計画するために、それは感覚運動行動、動物のオペラント条件付け、実験者は、生体力学的分析の技術的および実用的な側面に精通していることが必須です、およびデジタル化された大量のデータを処理/保管/管理する。これらの前提条件は、多くの明白なように見えるけれども、それは唯一の研修生が、比較的詳細な運動解析を行うことの技術的および実用的な複雑さを実現する実験を、これらのタイプに着手した後です。著者らは、実験者が入門生体力学を扱うコースに入学することをお勧め精通しているか、データの管理に必要なプログラミング言語に精通して誰かを雇う、と同等の重要性、取扱い、及び実験動物での作業、かなりの時間の相互作用を過ごす。神経科学における運動分析と感覚運動行動の分析を理解するために、実験者が(1を参照、4-7)いくつかの重要な参照と呼ばれます。
2。キネマティックとキネティック試験装置
二国間のデータを収集するための有用な運動と運動試験装置は、次のコンポーネント(詳細は、"特定の試薬および器具の表"を参照)で構成されています。
- 静かで十分なサイズの部屋(必ずしも防音、しかし低トラフィックエリアに位置する)
- 動物に部屋の外から気が散る音を制限するためにバックグラウンド"ノイズ"を供給するラジオ
- どちらかの端から等距離にある滑走路のセンター内にある四角い穴(11センチ× 11センチメートル)との明確なプレキシガラス、同封の、フラット面の滑走路(180センチ× 20 cm幅X高さ60cm)
- プレキシガラスのピース(10.5センチメートルX 10.5センチ)
- 両面粘着セロハンテープ
- 皮膚マーカーの3M反射粘着テープ
- 皮膚マーカーを作成するための穴のパンチ
- 皮膚マーカーの配置前にシェービングのために動物を麻酔するために必要なイソフルランの麻酔器
- 滑走路の長さに沿って動物の励みに動きのためのチェリオス
- AMTI HE6X6 forceplate
- VICON Motusカスタマイズされたシステム(ソフトウェア、コンピュータ、等)
- 適切なコネクタのケーブルと4ビデオカメラ(少なくとも60 Hzのサンプリング)と三脚
- 4カメラマウントのハロゲンライトの動物対象の照明に最適な照明と反射皮膚マーカーを提供します。
- 適切なサイズのキャリブレーションのフレームまたは意味のある距離尺度にx、y、zの位置を校正するためにViconのMotusシステムに必要なボリューム
3。動物のトレーニング
データを収集する前に、各動物は、平坦な表面、同封の滑走路を横断するように訓練する必要があります。適切な動物のサプライヤーからラットを受信すると、動物は1週間のための彼らの新しい家に環境に順応させる必要があります。この順応時間の間に、いくつかのチェリオスは、ラットのケージに毎日置かれている。動物は、肥満を防止し、このタスクを実行する動機を確保するため、そのメンテナンスのエネルギー所要量に制限食品です。その後、各動物は1週間、毎日10-15分のための実験者によって処理されます。この同じ期間に、各動物は、いずれかの端に位置するチェリオスで滑走路に配置されます。動物がその環境に慣れになると、彼らはチェリオスを食べ始めます。動物が快適で滑走路内でチェリオスを食べになると、実験者は、その後operantly条件動物を食品の報酬のために滑走路の長さを実行する必要があります。これは、ラットが配置されている滑走路の反対側に¼チェリオを投げることによって達成される。ラットは、このチェリオを食べると、別の¼のチェリオは、滑走路のもう一方の端に配置されます。これは、一貫してラット(トスの> 90%)まで、毎日15〜20分間疾走/境界なしにチェリオを食べるために一定の速度(すなわち探索、停止、起動せず、または歩行を変更せずに)で滑走路に沿って移動を行います。ラットは小走り歩行を採用すべきである。このタスクへの動物の上に空調は> 90 cm / sの走行動物の指標となるこれらの歩容を疾走し、バウンディング動物につながる可能性境界と歩容を疾走する、生体力学的に、さまざまな理由(例えば足のリードの選択基準、など)のために解釈することは困難です。我々の経験では、かつてラットは一貫して歩容を疾走するかの境界採用、それは滑走路にlocomotingつつも、小走り歩行を使用することは困難、不可能ではないです。動物の末梢または中枢神経系の損傷に苦しんでいる後に速度> 90 cm / sにはめったに見られない。成功したトレーニングに到達する時間はヴァリアーですラットの系統と男女間のBLE。ウィスター、ルイス、のLong - Evans、およびSprague - Dawleyラットの系統は一貫して訓練8の発症から2週以内の滑走路を横断することができます。我々の経験では、フィッシャー(F - 344)ラットは、このタスク8を学ぶために4-6週間の上向きを取る傾向がある。
4。マーキング関節位置
前肢運動学的分析は、原因で腰を落とした姿勢9持っているラットのような種で悪化した前肢、、で皮膚マーカーを配置することによって課される皮膚の動きのアーティファクトに信頼性が低いです。代わりに、前肢の運動は、X線映画撮影や透視10-13を使用して達成されなければならない。このように、後肢関節位置のマーカーの配置は、ここに記載されている。
データ収集の前に、各ラットは、適切な吸入麻酔薬(例えばイソフルラン、1.5〜2%が精密vaporizorにダイヤル)とフェイスマスクを介して酸素を投与、およびキー地形解剖学を用いたデータ収集の前に少なくとも24時間麻酔でなければなりませんランドマークは、マークされている必要があります。手順の簡潔さを与え、および長時間作用型麻酔薬が使用されていないので、動物の加温装置の使用は、動物の体温を維持するために使用する必要はありません。動物の麻酔になると、腸骨稜のレベルに後肢と背は、坊主です。動物は、胸骨の横臥位に配置され、その後肢はそれをサポートするために会社発泡スチロールの梱包を使用しておおよその立ち位置に配置されます。腸骨稜の頭蓋-ほとんどの部分を覆う皮膚は、大腿骨の大転子、外側脛骨粗面、足根関節、および第 5中足骨の遠位及び外側面は、非毒性の永久的なマーカーでマークされます。動物が麻酔から回収される。時間的な研究のために、定期的な麻酔は、それによってその後の反射マーカーの配置を可能に後肢(下記参照)を剃るために必要となる場合があります。また、以前にマークされた解剖学的ランドマーク(同じ非毒性のマーカーを使用して)の毎日のハイライトは徐々に自然な毛づくろい行動を通じてマーカーが削除されるラットのような必要となります。
5。データの記録
すべてのカメラビューは、その位置が適切とビューの同じフィールドをキャプチャしているかどうか確認されます。各カメラは、互いに約60〜80度の角度で配置する必要があります。ビューのフィールドには、中央にforceplate二歩をキャプチャするために十分な滑走路の長さを含める必要があります。
キャリブレーションのボリュームは、滑走路の所定の領域内に配置される。 、カメラの各々から、滑走路内でのキャリブレーションボリュームの単一フレームキャプチャされます。極のそれぞれの長さに沿ってすべてのキャリブレーションマークがデジタル化されています。一度だけデジタル化で十分なエラーは、運動データを収集するために進んで実験者が、できます達成されます。このキャリブレーションのステップは、前のデータを収集するために重要です。キャリブレーションが正確に行われていない場合、またはキャリブレーション前のレコーディングセッションにすぐに発生しない場合、すべての結果のデータは不正確と使用できなくなります。重要なのは、カメラのいずれかが触れたり、移動している場合、そのシステムのキャリブレーションを繰り返す必要があると仮定するのが最も安全です。
滑走路に動物を配置する直前に、その重量が記録され、事前に作られた円錐形の反射皮膚マーカーは(3M反射テープを使用して、テーブルを参照してください)後肢地形ランドで行われたあらかじめ定められたフェルトマークに接着されている。保管したいが、グループ間の比較を行うために場合の重要な側面 - 動物の体重を記録することが体重に床反力の回顧正規化を許可します。また、体重の測定は、実験の期間中、動物の全体的な健康状態のモニタリングを容易にします。マーカーの配置は、適切な動物の取り扱いを必要とし、動物の麻酔を必要としません。反射テープの接着剤は、動物の皮膚に付着するのに十分でない場合は、非毒性接着剤(例:3M VetBondの組織接着剤)の非常に少量の動物の体上のマーカーの付着を促進するために使用することができます。マーカーが後肢に配置されると、実験者は、コンピュータのキーボードの近くで快適に位置し、手にViconのMotusシステムを介して接続されているイベントのマーカーを持っている必要があります。テンプレートとしてキャリブレーションファイルを使用して、いくつかのファイルは、録音の前に作られています。通常は25〜30のファイルは保存する必要があります。各ファイルは、一意に名前を付ける必要があります。各ファイルは1つが記録されている動物の実行記録表します。ファイル数:30〜25は、選択基準の速度(すなわち、60〜90センチメートル/ s)を満たすランの十分な数が収集されていることを確認する必要があります。ファイルの十分な数が作成された後、実験には、データの収集を開始できます。 Experimenterは滑走路の両端にチェリオスの¼の部分をスローすることにより、滑走路内にシャトルにラットを促す必要があります。入念な調整とタイミングで、イベントマーカーは開始時にトリガされ、成功した滑走路に沿ってパスを完了したラットの完了直前に。トレース原油床反力を調べた後、左または右の手足がフォースプレートを打つかどうかを記録した後、ファイルが保存され、閉じられます。左右の肢のforceplateヒットの等しい番号が記録されることが望ましい。ランの十分な数字が記録されるまで、特定の実行からのデータを記録するプロセスが繰り返されます。
6。データ解析
運動と床反力のデータ収集を完了すると、すべての動物からそれぞれの実行速度について評価する必要があります。つの比較的固定されたマーカー(iliumsの例:翼)を使用して1つのマーカー(ViconのMotusファイルのテンプレートを作成するときに前に行われる)の間に仮想的なポイントを評価することができます。この"仮想"の点の速度を計算する前に、腸骨マーカーのマーカーは、デジタル化されている必要があります。 Viconのmotusソフトウェアを使用して、この仮想的なポイントX -方向に(移動の水平方向)の速度が計算されます。そうすることで、唯一の最終的な分析で使用されている( 事前に決定される)特定の範囲の速度内で実行されます。我々60〜90 cm / sの間を移動する動物は、一貫性のある速歩歩容を使用していることがわかります。 10回(左肢がフォースプラットフォームと右の手足がフォースプラットフォームとの接触をする5ランとの接触をする5ラン)の最小値が必要です。許容実行は各動物のために識別されたら、残りの皮膚マーカーのデジタル化を完了する必要があります。
以前に記載されているように、、膝の皮膚の動きによるアーチファクトを補正するために、膝の位置の推定は、三角測量(または2の球の間の交差点の3D運動学二つの円2D運動学の交点)を使用して計算されます。股関節、膝、そしてホックの関節角度、速度、および加速度を今決定することができます。その精度が採用されているカメラのサンプリング速度に基づいて制限されてもスタンスとスイングの時間も、評価することができます。これらおよび他の計算は、ViconのMotus KineCalcソフトウェアを使用して(エクスポートをせずに)直接実行することができます、またはデータをASCIIデータとしてエクスポートし、MATLABなどのソフトウェアでカスタマイズ可能なルーチンを使用して分析することができます。
床反力データを測定し、AMTI力のプラットフォームで増幅し、ViconのMotus、1200 Hzで収集されます。このような、一度床反力のデータが収集されるように、適切なデジタルフィルタは、ViconのMotusを使用してデータに適用されます。実験者は、既に適切な皮膚マーカー、運動学的データとして同時に収集された床反力データは、他のいくつかのカスタマイズ可能なソフトウェアを使用して直接、または間接的にViconのMotus KineCalcを使用して分析することができますdigitizing後travel、識別された許容実行の速度を決定したことを考えるルーチン。力のためのさまざまな変数は、3つの直交方向のそれぞれにおいて、計算することができます。このような変数が重要なのはピーク力、面積ウント曲線(すなわちインパルス)、等を含んで、しかし、実験者は別々のそれぞれの動物の実行ごとに左右の肢のデータを保持する必要があります。右または左の手足から抽出されたデータは、各動物についての平均値とその動物のための代表的なデータとして使用されます。データは、適切な統計学的手法を用いて分析される。
7。代表的な結果
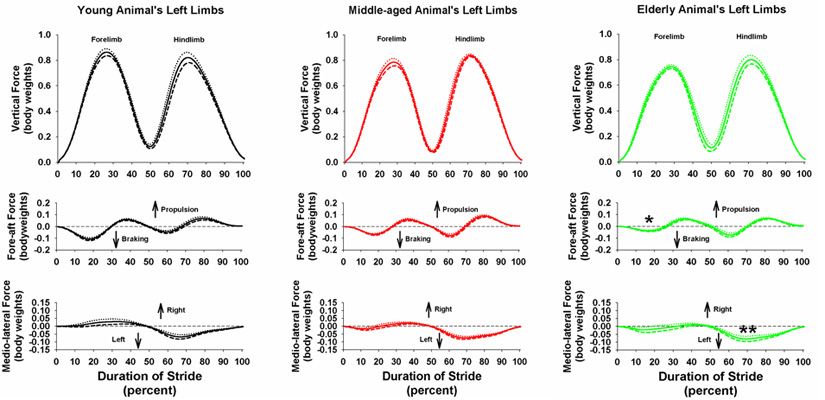
運動分析のこの形式のユーティリティを表現するために、運動学および床反力は、若い、中年、そして老人雌Wistarラットについて測定した。この分析から、年齢関連の違いは、雌のWistarラットのために発見された。特に、地面反力の解析では、高齢者のラットは前肢制動能力が低下していることを示していると動物の他のグループ(図1)に比べて横方向の安定化のためのより多くの彼らの後肢を使用する傾向があります。運動学が容易にラットのほぼすべての年齢(図2)から記録することができることを示しているものの運動学的解析は、各グループ間の任意の統計的な差異を明らかにしなかった。

図1床反力は、若いの左の手足から採取したトレース。(24ヶ月歳であり、n = 5)、及び高齢者(4か月古い; N = 7)、中年(n = 7の13から14ヶ月齢)雌のWistarラット。右手足が類似していた。それは高齢者のラットは若いと中年ラットに比べてブレーキ(* = p <0.05)がために低く、その前肢を使用し、高齢者のラットは若いラットに比べて横方向の安定化のために彼らの後肢以上を使用する傾向があることは容易に明らかである(**).実線は平均値、破線は平均値+ SEを表して表し、破線行は、SEを意味表しています。 大きな図をご覧いただくにはこちらをクリックしてください。

図2若年、中年、そして老年ラットの左肢のためのキネマティックスティック数字。スティックの数字は、グループのそれぞれについて、左肢の平均値の動きを表しています。ステップサイクルの中で関節角のための動物の群間に有意差はなかった。 大きな図をご覧いただくにはこちらをクリックしてください。
Discussion
本論文は、連続的な定量的な運動と床反力の測定を使用して運動を評価するための方法論を提供します。この方法論に着手するに興味を持つ人にとって重要な運動のバイオメカニクス、動物の感覚の挙動、およびデータの管理や操作に強力なバックグラウンドです。運動学と地面反力の測定は、自発運動の解析(例えば、エンドポイント対策、順序評価尺度)のいくつかの他の形態と比較して、追加の時間と専門知識を必要とするものの、得られたデータは、整形外科14から22と神経学のさまざまな敏感な、客観的かつ定量的です。種の様々な疾患の1-3、23〜32モデル、。
私たちは、シンプルで低感度指標を用いて収集されることができなかった菌株をマッチさせたラットの情報の様々な年齢層の間に運動の違いを記述するデータを提供している。さらに、運動の運動学と動力学的解析、評価の他の形態が不成功となる神経系の様々な条件での運動の変化を記述するために使用されています。潜在的なtherapeutantsを評価する際に敏感な措置の8、23-25、27の使用が特に重要になる病気の様々なモデルのため。テストは、潜在的なtherapeutantの影響を識別するのに十分な感度ではない場合実験者は、タイプ- II統計的な誤差(すなわち結び、実際に効果があった場合の治療のは効果がない)コミットのリスクを実行します。さらに、エンドポイント対策と運動を評価し、より主観的なテストがあるため、バイアスの可能性が存在する。運動学的および動力学的評価は、適切な包含/除外基準は先験的に作られて提供され、その中の純粋に客観的であり、実験者は、単に収集し、検査し、データ(すなわちデータの決定には主観的なコンポーネントが存在しない)ために適切な統計値を適用します。
運動学的および動力学的分析は、また種の多数に使用する能力を与える。実際には、運動学、床反力の測定、またはその両方がそのような象の33から35、牛36、馬37から40、犬4、41から45、猫21、46から49まで 、様々な種のさまざまな用途に使用されているげっ歯類3、8、50、51、鳥4、52から55、そして魚56、57(このリストは網羅されるものではない)。筆者の経験では、しかし、マウスの使用は、マウスが滑走路に沿って移動するoperantly条件に容易ではないことを考えると問題があります。滑走路をたどったときに、与えられた、マウスは、比較的一定の速度で移動し、代わりにスピードアップ、スローダウンしません。床反力測定のための実験装置は、トレッドミルの使用状況に合わせて変更されることになっていた場合、この動作はおそらく、部分的には、トレッドミルとビデオテーピングトレッドミル上の動物locomotingを。58上にマウスを実行することによって克服することができる、床反力の測定はでしょうトレッドミルのベルトは、船首船尾とメディオ - 横力の測定を妨げるとして可能性が高いだけ垂直床反力のために容易に得ること。
完全に、運動の運動学と動力学的解析は、整形外科と神経学的条件の様々なモデルのために用いることのできる、信頼性の敏感な、と客観的な方法です。さらに、機器のすべては、このように感覚運動行動分析のこのフォームを実行しないため、関連する理由を否定し、げっ歯類で使用するために利用できるとなっています。
Disclosures
利害の衝突は宣言されません。
Acknowledgments
この研究は、カナダ自然科学工学研究評議会からAAWにディスカバリーグラントによってサポートされていました。
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J.
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M.
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R.
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}