

Summary
运动往往是研究在各种型号的疾病,如神经科学和骨科等领域的行为的结果。此视频文件,打算来形容收集老鼠在奔放的运动地面反作用力和运动学的方法。
Abstract
行为,在其最广泛的定义,可以定义为电机的生理过程体现。因此,所有的行为表现,通过电机系统。运动神经科学和骨科等领域,是为多种疾病模型的常用评估行为。例如,外伤后神经系统的运动恢复是最常用的评估行为 1-3之一。虽然运动可以使用的各种端点测量(例如,所需的时间来完成的运动任务等),半定量运动的措施(如序号评定量表(如巴索贝蒂和布雷斯纳汉运动功能(BBB)的评级规模等))和替代评估行为的措施(如肌肉力量,神经传导速度等),只有动力学(测力)和运动学(细分的身体在太空测量)提供了一个战略的动物是能够locomote 1的详细描述。虽然不是新的,运动学和动力学locomoting啮齿类动物的测量现在更容易获得由于为此目的而设计的市售设备的可用性。然而,更重要的是,实验者需要与生物力学分析的理论非常熟悉和了解分析这些形式的好处和限制,会变成什么样一个相对劳动密集型的研究展开前。本文件旨在描述一个使用市售设备的运动学和地面反作用力的数据收集方法。设备和仪器设置的详细信息,培训前动物,纳入和排除标准,可接受的运行,并收集数据的方法进行了阐述。我们通过描述应变匹配的年轻成年,中年,老年大鼠的运动学和动力学的行为分析技术的实用。
Protocol
1。生物力学步态分析的先决条件
着手进行购买昂贵的运动功能分析设备,并规划将进行运动学和/或动能的运动功能评估的实验之前,它是实验者必须熟悉的技术和实践方面的生物力学分析,感觉的行为,操作性条件反射的动物和处理/存储/管理大量的数字化数据。虽然这些先决条件似乎是显而易见的许多的,它是后,才开始根据这些类型的实验,让学员认识到执行比较详细的运动功能分析技术和实践的复杂性。作者建议实验者参加在介绍生物力学的交易过程,熟悉或雇人熟悉数据管理所需的一种编程语言,并具有同等的重要性,花大量的时间进行交互,处理,并与实验动物工作。对于理解运动神经系统科学的分析和感觉运动行为分析,实验者被称为几个重要的参考( 见1,4-7) 。
2。运动学和动力学测试仪器
一个运动学和动力学的检测仪器,用于收集双边数据非常有用,是由以下几部分组成(见“表特定的试剂和仪器”更详细)组成:
- 安静和足够大小的房间(不一定隔音,虽然在低流量区位于)
- 广播电台提供背景“噪音”,以限制从房间外的动物分心的噪音
- 从两端跑道等距离的中心位于透明有机玻璃封闭,平板表面跑道(180厘米长X宽20厘米x 60厘米高),方孔(11厘米× 11厘米)
- 这块丛玻璃(10.5厘米X 10.5厘米)
- 双面胶透明胶带
- 3M反光胶带皮肤标记
- 创建皮肤标记打孔
- Isofluorane anesthetizing动物麻醉机前先剃须,皮肤标记的位置
- 麦片为鼓励运动的动物,沿跑道的长度
- AMTI HE6X6 forceplate
- 维科Motus定制的系统(软件,计算机等)
- 4个摄像机(至少60 Hz的采样)与适当的连接电缆和三脚架
- 4摄像机安装卤素灯提供最佳的照明动物主题的照明和皮肤反射标记
- 适当大小的标定架或卷威康Motus系统所必需的X,Y,Z位置校准成有意义的距离措施
3。动物训练
收集数据之前,每个动物的,必须经过培训,跨平坦的表面,封闭跑道。从一个合适的动物供应商在收到大鼠,动物被驯化1周的新家。在此驯化的时间,几个麦片每天放置到老鼠的笼子。动物是限制其维护能源需求的食物,防止肥胖,并确保执行此任务的动力。此后,每个动物的处理10-15分钟,每天1周的实验者。在同一时期,每个动物被放置到位于任一端与麦片跑道。一旦动物变得熟悉他们的环境,他们将开始吃麦片。一旦动物的舒适,吃麦片内的跑道,然后实验者必须operantly条件的动物为食物奖励运行跑道的长度。这是通过折腾¼ cheerio大鼠是定位在跑道的另一端。一旦老鼠吃这个cheerio,另一荐cheerio被放置在跑道的另一端。这样做是为了每天15-20分钟,直到沿跑道的大鼠一贯(> 90%),扔在一个恒定的速度移动(即没有启动,停止,探索,或在不改变步态)吃奔腾/边界的cheerio 。老鼠只应雇用小跑的步态。这一任务的动物在空调可导致动物奔腾和边界,这些步态是指示性动物旅行> 90厘米/秒。边界和奔腾的步态,生物力学,更难以解释为由于各种原因(如腿铅列入标准等)。在我们的经验,一旦大鼠一贯采用奔腾或边界的步态,它是困难的,如果不是不可能的的,在跑道locomoting时,他们使用一个小跑步态。都是世所罕见的动物遭受从周边或中枢神经系统损伤后的速度> 90厘米/秒。是变化的时间才能达到成功的培训BLE大鼠株和两性之间。只Wistar,刘易斯,埃文斯长,和只Sprague - Dawley株都能够始终如一地穿越跑道,2个星期内,从发病培训 8 。根据我们的经验,菲舍尔(F 344)大鼠往往需要4-6周以上,学习这方面的任务 8 。
4。关节位置标记
前肢的运动学分析是不可靠的由于皮肤运动,置于皮肤上的物种加剧的前肢,像老鼠,有一个蜷缩的姿态9标记的工件。相反,前肢运动必须达到使用X射线摄影或透视10-13。因此,后肢关节的位置标志的位置仅仅是本文所述。
收集数据之前,各组大鼠麻醉后至少24小时在数据采集之前使用适当的吸入性麻醉剂(例如isofluorane,拨通了一个精确的vaporizor 1.5-2%)和管理,通过面罩吸氧,关键地形解剖地标必须标明。鉴于简洁的程序,因为不使用长效麻醉剂,使用动物变暖设备不需要使用,以保持动物的体温。动物麻醉后,后肢和背部,髂脊水平是光头。动物,然后放置在胸骨斜卧和其后肢放置在一个近似的常设使用企业包装泡沫来支持它的位置。覆髂波峰最颅部分的皮肤,大粗隆股骨,胫骨粗隆外侧,跗关节,和第 5跖骨的远端和侧面标有一个无毒的永久性标记。该动物从麻醉中恢复。对于时间的研究,定期麻醉可能需要刮胡子的后肢从而允许随后的反射标记的位置(见下文)。此外,每日以前标记的解剖标志(使用相同的无毒标记)突出须老鼠会慢慢消除通过自然的修饰行为的标记。
5。数据记录
所有摄像机的意见进行检查,以确保他们的立场是适当的,捕捉相同的视野。每个摄像机应放在对方约60-80度。视野应包括在中心forceplate和跑道的长度足以捕捉到两个大步。
校准量是放置在预先确定的跑道面积。一个每个相机,跑道内的校准量的单帧捕获。所有沿两极的长度校准标志是数字化。只有一次,一个令人满意的错误是在数字化完成,可以进行的运动数据收集实验者。此校准步骤是前收集数据的关键。如果不进行准确校准,如果校准不会立即发生之前记录会话,所有产生的数据将不准确,无法使用。重要的是,如果任何相机触摸或移动,它是最安全的承担,需要重复校准系统。
之前放置在跑道上的动物,它的重量记录,并预先制作的锥形反光皮肤标记(使用3M反光胶带,见附表)坚持在预先确定的感觉后肢地形地标标志。记录动物的体重将允许追溯地面反作用力 - 体重正常化的一个重要方面,如果想使群体之间的比较。此外,测量体重,有利于在实验期间监测动物的总体健康。标记的位置,只需要适当的动物处理和不需要麻醉的动物。如果反光胶带粘合剂不足,坚持以动物的皮肤,极少量的无毒胶水(如3M VetBond组织粘合剂)可以用来促进动物的身体上的标记的坚持。一旦后肢上的标记上,实验者应舒适的位置,电脑的键盘附近上,已在手通过威康Motus系统连接事件标记。使用校准文件作为模板,有几个文件是在预先录制。通常情况下,25至30个文件需要保存。每个文件应命名为唯一。每个文件都将代表一个记录被记录动物的运行。二十五个30个文件,以确保收集足够数量的符合纳入标准的速度(即60-90厘米/秒)的运行。足够数量的文件被创建后,实验者可以开始收集数据。电子xperimenter必须提示跑道内穿梭的老鼠扔在跑道两端麦片荐件。认真协调和时序,在启动触发事件标记和前完成沿跑道成功完成了一通大鼠。原油地面反作用力跟踪研究后,录制后的左侧或右侧肢体是否打力板,该文件是保存和关闭。平等的左,右侧肢体forceplate点击数应记录在案。从一个给定的运行记录数据的过程是反复进行,直到有足够数量的运行已记录。
6。数据分析
运动学和地面反作用力完成数据收集后,每一种动物从每个的运行需要评估的速度。使用两个相对固定的标志物(如翅膀的iliums),可以评估一个虚拟点之间的标记(创建威康Motus文件模板时之前完成)。在这个“虚拟”的点的速度计算,髂标记的标记必须数字化。使用威康motus软件,这个虚点在X方向(水平方向运动)的速度计算。在这样做时,只运行一个给定范围内的速度内(确定先验 )在最后的分析。我们发现,动物60-90厘米/秒之间移动使用的是一致的小跑步态。最小的10次(5运行,左侧肢体接触与力平台和5运行右侧肢体的力量接触的平台)是必需的。一旦确定每个动物可接受的运行,其余皮肤标记的数字化工作必须完成。
为了弥补皮肤超过膝盖的运动伪影,膝盖的位置的估计是计算三角(两圆相交的二维运动学;或交叉点之间的2球三维运动学),先前已描述。现在可以决定的,髋关节,膝关节和飞节的角度,速度和加速度。立场和摆动时间也可以进行评估,但其准确性是有限的,根据被雇用的摄像机的采样速度。这些以及其他可以直接计算(即无出口)使用威康Motus KineCalc软件或数据可以导出为ASCII数据和分析软件如Matlab使用自定义的例程。
地面反作用力的数据测量和放大AMTI测力台,并在1200赫兹威康Motus收集。因此,一旦地面反作用力的数据收集,适当的数字滤波器适用于使用维康Motus的数据。由于实验者已经确定适当的皮肤标志,地面反作用力同时作为动态数据收集的数据,可以使用维康Motus KineCalc直接或间接使用一些其他的定制软件进行分析后,数字化的旅行,并确定了可接受的运行速度例程。各种力量的变量,在三个正交方向,可以计算的。这些变量包括峰值力,面积UND曲线(即脉冲)等,然而,更重要的是,实验者必须为每个单独的每种动物的运行保持左,右肢数据。从右侧或左侧肢体提取出的数据是平均为每个动物和动物的有代表性的数据。数据,然后使用适当的统计程序进行分析。
7。代表性的成果
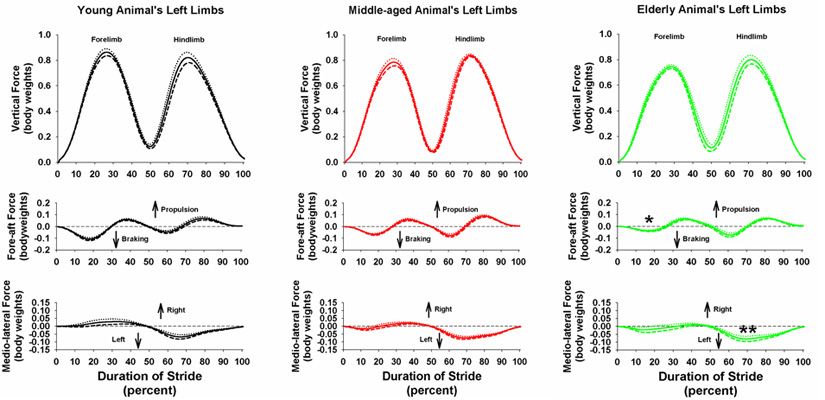
为了表示这种形式的运动分析的实用工具,运动学和地面反作用力被确定为青年,中年和老年的雌性Wistar大鼠。从这种分析中,年龄有关的差异,发现雌性Wistar大鼠。特别是,地面反作用力的分析表明,减少老年大鼠前肢的制动能力,往往使用横向稳定的后肢比其他群体的动物(图1)。运动学分析没有透露各组间的统计差异,虽然表明,运动可以很容易地从几乎任何年龄大鼠(图2)记录。

图地面反作用力的跟踪取自年轻左侧肢体(4月龄; N = 7),中年(13-14月龄; N = 7)和老年(24月龄; N = 5 )雌性Wistar大鼠。右侧肢体相似。这是显而易见的老年大鼠,使用它们的前肢制动(* = P <0.05)相比,青年和中年大鼠,老年大鼠幼鼠相比,横向稳定倾向于使用他们的后肢(**).实线表示的意思是,虚线表示平均值± SE;虚线线代表平均东南,请点击这里看到一个更大的数字。

图2,青年,中年和老年大鼠的左侧肢体运动坚持数字。棒的数字代表的左侧肢体各组的平均运动。有动物群体之间无显着性关节角度的差异,在步骤周期,请点击这里看到一个更大的数字。
Discussion
本文件提供评估运动使用连续定量运动学和地面反作用力的决心的方法。重要的是这种方法的一项有兴趣的人在运动生物力学,感觉动物的行为,数据管理和操作的强大背景。虽然运动学和地面反作用力的决心需要更多的时间和专业知识,一些其他形式的运动分析(如端点措施,有序评定量表)相比,所获得的数据是敏感的,客观的和定量的各种14-22骨科和神经1-3,23-32模型的疾病,在不同的物种。
我们所提供的数据描述应变匹配的大鼠的信息不能收集的各种年龄使用简单和较不敏感的措施,在运动之间的差异。此外,运动的运动学和动力学分析已用于描述在多种神经系统的条件下,其他形式的评价是不成功的中的运动变化,8日,23日至25日,27使用敏感的措施进行评估时,就显得尤为重要潜在therapeutants各种型号的疾病。如果测试是不够敏感,辨别一个潜在的therapeutant运行实验者犯了II型统计错误的风险的影响(即结论有没有治疗效果时,其实有效果)。此外,因为端点措施和评估运动的主观测试中,存在一种偏见的潜力。运动学和动力学的评价在这纯粹是客观的,提供适当的纳入/ 排除的标准是先验的,实验者简单的收集,审查和适当的统计数据(即有没有主观成分测定数据)。
运动学和动力学分析,也能用于众多物种的能力。事实上,运动学,地面反作用力的决心,或两者已被用于多种物种,如大象33-35,牛36,马37-40,狗4,41-45,猫21,46-49,各种啮齿类动物3,8,50,51,52-55,鸟类4,鱼56,57(这个列表并不详尽)。然而,在作者的经验,对小鼠的使用是有问题的的老鼠不容易operantly沿跑道条件。鉴于此,小鼠不会旅行在一个相对恒定的转速的,而加快和减慢时,穿越跑道。部分,此行为可能是运行在一台跑步机和视频在跑步机上的录音动物locomoting 58小鼠克服实验仪器的地面反作用力的决心,如果是跑步机的使用进行修改,地面反作用力的决心可能只有很容易获得垂直地面反作用力作为跑步机的皮带会干扰前船尾和德尔梅迪奥侧向力的决心。
总而言之,运动的运动学和动力学分析是一种可靠,灵敏,客观的方法,可用于各种型号的整形外科和神经系统的条件聘用。此外,所有的设备已成为在啮齿类动物中使用,从而否定任何不执行这种形式感觉行为分析的相关原因。
Disclosures
没有利益冲突的声明。
Acknowledgments
这项研究得到了发现格兰特AAW从加拿大自然科学和工程研究理事会。
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J.
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M.
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R.
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}