

Summary
Locomotion is vaak onderzocht als een gedrags-uitkomst in diverse modellen van de ziekte in gebieden zoals neurowetenschappen en orthopedie. Deze video paper beoogt te beschrijven een methode voor het verzamelen van de grond reactie krachten en kinematica van de ratten tijdens de ongebreidelde motoriek.
Abstract
Gedrag, in zijn breedste definitie, kan worden gedefinieerd als de motor manifestatie van fysiologische processen. Als zodanig zijn alle gedragingen manifesteren door middel van de motor systeem. Op het gebied van neurowetenschappen en orthopedie, motoriek is een algemeen geëvalueerd gedrag voor een verscheidenheid van de ziekte-modellen. Bijvoorbeeld, motorische herstel na een traumatisch letsel aan het zenuwstelsel is een van de meest geëvalueerde gedragingen 1-3. Hoewel de motoriek kan worden geëvalueerd met behulp van een verscheidenheid aan eindpunt metingen (bijvoorbeeld de tijd genomen om een motorische taak, etc compleet), semi-kwantitatieve kinematische maatregelen (bijv. ordinale schalen (zoals Basso Beattie en Bresnahan bewegingsapparaat (BBB) schaal, enz.)) en surrogaat maatregelen van gedrag (bijv. spierkracht, zenuwgeleiding snelheid, etc), alleen kinetiek (kracht metingen) en kinematica (metingen van het lichaam van segmenten in de ruimte) een gedetailleerde beschrijving van de strategie waarmee een dier in staat is om een voortbewegen. Hoewel niet nieuw, kinematische en kinetische metingen van locomoting knaagdieren is nu gemakkelijker toegankelijk te wijten aan de beschikbaarheid van commercieel verkrijgbare apparatuur voor dit doel ontworpen. Belangrijker is echter, onderzoekers moeten zeer vertrouwd met de theorie van de biomechanische analyses en de voordelen en beperkingen van deze vormen van analyses te begrijpen voorafgaand aan het aanbreken van wat een relatief arbeidsintensieve studie te worden. De huidige studie heeft als doel te beschrijven een methode voor het verzamelen van kinematische en op de grond reactiekracht gegevens met behulp van de handel verkrijgbare apparatuur. Details van apparatuur en apparatuur set-up, zijn pre-training van de dieren, inclusie en exclusie criteria van aanvaardbare runs, en de methoden voor het verzamelen van de gegevens beschreven. Illustreren we het nut van deze gedragsanalyse techniek door het beschrijven van de kinematica en kinetica van de stam op elkaar afgestemde jonge volwassene, middelbare leeftijd, en geriatrische ratten.
Protocol
1. Voorwaarden voor een Biomechanische Locomotion Analyses
Voorafgaand aan boord gaan bij het kopen van dure bewegingsapparaat analyse apparatuur, en planning experimenten waar de kinematica en / of de kinetische motorische beoordeling zal worden uitgevoerd, is het noodzakelijk dat de onderzoeker bekend te zijn met de technische en praktische aspecten van de biomechanische analyses, sensomotorische gedrag, operante conditionering van dieren , en behandeling / opslag / beheer van grote hoeveelheden digitale data. Hoewel deze pre-requisites ligt voor de hand voor velen, het is pas na inschepen op dit soort experimenten waarbij cursisten realiseren van de technische en praktische complexiteit van het uitvoeren van relatief gedetailleerde analyse bewegingsapparaat. De auteurs bevelen dat onderzoekers zich inschrijven voor een cursus omgaan met inleidende biomechanica, bekend zijn met of huur iemand die vertrouwd is met een programmeertaal die nodig zijn voor data management, en van even groot belang, besteden veel tijd in interactie, behandeling, en het werken met proefdieren. Voor het begrip van motoriek analyse en sensomotorische gedrag analyse in de neurowetenschappen, zijn onderzoekers genoemd aantal belangrijke referenties (zie 1, 4-7).
2. Kinematische en Kinetic testapparatuur
Een kinematische en kinetische testapparatuur, handig voor het verzamelen van bilaterale gegevens, bestaat uit de volgende onderdelen (zie "Tabel van specifieke reagentia en apparatuur" voor meer details):
- Rustig en voldoende grote kamer (niet per se geluiddicht, hoewel gelegen in een gebied met weinig verkeer)
- Radio op de achtergrond "ruis" te leveren aan storende geluiden beperken van buiten de ruimte aan de dieren
- Helder plexiglas, ingesloten, platte ondergrond start-en landingsbaan (180 cm lang X 20 cm breed X 60 cm hoog) met een vierkant gat (11 cm X 11 cm), gelegen in het centrum van de start-en landingsbaan op gelijke afstand van beide uiteinden
- Stuk plexi-glas (10,5 cm x 10,5 cm)
- Dubbelzijdig klevende plakband
- 3M reflecterende kleefband voor de huid markers
- Perforator voor het creëren van de huid markers
- Isofluorane anesthesieapparaat die nodig is voor verlamming dieren voor het scheren voorafgaand aan de plaatsing van de huid markers
- Cheerios voor het stimuleren van beweging van het dier over de lengte van de start-en landingsbaan
- Amti HE6X6 forceplate
- Vicon Motus op maat gemaakt systeem (software, computer, etc)
- 4 video's (minstens 60 Hz sampling) en statieven met de juiste connector kabels
- 4 camera gemonteerde halogeenlampen zorgt voor een optimale verlichting voor verlichting van het dier onderwerp en de reflecterende huid markers
- Juiste maat kalibratie frame of het volume nodig voor Vicon Motus systeem x, y, z posities kalibreren in zinvolle afstandsmaten
3. Animal Training
Voorafgaand aan het verzamelen van gegevens, moet elk dier worden opgeleid om een flat-oppervlak, ingesloten start-en landingsbaan oversteken. Na ontvangst van ratten van een geschikt dier leverancier, moeten de dieren worden gewend aan hun nieuwe huis voor 1 week. Gedurende deze tijd acclimatisering, zijn verschillende Cheerios dagelijks geplaatst in de kooi van de rat. Dieren zijn voedsel beperkt tot het onderhoud ervan energie-eisen om overgewicht te voorkomen en de motivatie om deze taak uit te voeren te garanderen. Daarna wordt elk dier behandeld door de experimentator gedurende 10-15 minuten per dag gedurende 1 week. Gedurende deze zelfde periode, wordt elk dier geplaatst in de start-en landingsbaan met Cheerios gelegen aan beide uiteinden. Zodra het dier wordt vertrouwd zijn met hun omgeving, zullen ze beginnen met het eten van de Cheerios. Zodra het dier is comfortabel en het eten Cheerios binnen de start-en landingsbaan, de onderzoeker moet dan operantly conditie van het dier aan de lengte van de baan lopen voor een levensmiddel beloning. Dit wordt bereikt door gooien ¼ Cheerio naar de andere kant van de landingsbaan, waar de rat is geplaatst. Zodra de rat eet dit cheerio, is een ander ¼ cheerio geplaatst aan de andere kant van de landingsbaan. Dit gebeurt gedurende 15-20 minuten per dag totdat de rat consistent (> 90% van de worpen) beweegt zich langs de start-en landingsbaan met een constante snelheid (dwz zonder het starten, stoppen, het verkennen van, of zonder gang) om de cheerio eten zonder galop / begrenzende . De rat mag alleen worden gebruik een draf gang. Over-conditionering van de dieren om deze taak kan leiden tot dieren galopperen en begrenzende deze gangen zijn indicatief voor dieren reizen> 90 cm / s. Begrenzen en galopperende gangen, biomechanisch, zijn moeilijker te interpreteren voor een verscheidenheid van redenen (bijvoorbeeld been leiden inclusiecriteria, etc). In onze ervaring, een keer consequent ratten dienst galopperen of omsluitend gangen, is het moeilijk, zo niet onmogelijk om ze te gebruiken een draf lopen, terwijl locomoting in de start-en landingsbaan. Snelheden> 90 cm / s worden zelden gezien na een dier lijden heeft gehad van perifere of centrale zenuwstelsel letsel. Tijd om succesvolle training te bereiken is variaBLE tussen de stammen en geslachten van ratten. Wistar, Lewis, Long-Evans, en Sprague-Dawley stammen zijn in staat om de start-en landingsbaan consequent traverse binnen 2 weken na het begin van de training 8. In onze ervaring, Fischer (F-344) ratten hebben de neiging om omhoog van 4-6 weken te nemen om deze taak acht te leren.
4. Gemeenschappelijk standpunt Markering
Voorpoot kinematische analyse onbetrouwbaar is te wijten aan de huid beweging artefact opgelegd door het plaatsen van de huid markeringen op de voorpoten, die wordt versterkt in soorten, zoals ratten, dat een ineengedoken houding 9 hebben. In plaats daarvan moet kinematica van de voorpoten worden bereikt met behulp van x-ray cinematografie of fluoroscopie 10-13. Als zodanig, achterste ledematen gezamenlijk standpunt marker plaatsing is alleen hierin beschreven.
Voorafgaand aan het verzamelen van gegevens, moet elke rat worden verdoofd ten minste 24 uur van te voren van het verzamelen van gegevens met behulp van een geschikte inhalatie-anesthesie (bijv. isofluorane, 1,5-2% gekozen op een precisie vaporizor) en toegediend in zuurstof via een gezichtsmasker, en de belangrijkste topografische anatomische monumenten moet worden gemarkeerd. Gezien de korte duur van de procedure, en omdat langwerkende anaesthetica worden niet gebruikt, gebruik van een dier opwarming apparaat hoeft niet te worden gebruikt om het dier lichaamstemperatuur te behouden. Zodra het dier is verdoofd, de achterpoten en de dorsum, tot het niveau van de darmbeenskammen worden geschoren. Het dier wordt dan geplaatst in sternum decubitus en de achterpoten worden geplaatst in een benadering staande positie met behulp van stevige vulling schuim om het te ondersteunen. De huid bovenliggende het craniale meest delen van de iliacale toppen, is de trochanter major van het femur, de laterale tuberositas tibiae, het spronggewricht, en de distale en laterale aspect van de 5 e middenvoetsbeentje gemarkeerd met een niet-giftige permanent marker. Het dier is hersteld van anesthesie. Voor de tijdelijke studies kunnen periodieke anesthesie nodig zijn om de achterpoten zodat het toelaat latere reflecterende marker plaatsing (zie hieronder) te scheren. Ook zal dagelijks accentueren van de eerder gemarkeerde anatomische oriëntatiepunten (met behulp van dezelfde niet-toxische marker) nodig als ratten langzaam zal de markeringen te verwijderen door middel van natuurlijke verzorging gedrag.
5. Gegevensopslag
Alle camera bekeken worden onderzocht om ervoor te zorgen dat hun positie is nodig en vastleggen van hetzelfde gezichtsveld. Elke camera moet worden geplaatst op ongeveer 60-80 graden ten opzichte van elkaar. Het gezichtsveld moet de forceplate in het centrum en een lengte van de baan voldoende om twee stappen vast te leggen.
De kalibratie volume is geplaatst binnen de vooraf bepaalde gebied van de start-en landingsbaan. Een enkel frame van de kalibratie volume binnen de start-en landingsbaan, van elk van de camera's, wordt vastgelegd. Alle geijkte merken langs de lengte van elk van de polen zijn gedigitaliseerd. Slechts een keer een bevredigende fout in de digitalisering wordt bereikt, kan de experimentator overgaan tot het verzamelen van gegevens bewegingsapparaat. Deze kalibratie stap is essentieel voor het verzamelen van gegevens. Als de kalibratie is niet nauwkeurig uitgevoerd, of indien kalibratie niet onmiddellijk optreden voorafgaand aan een opname sessie, worden alle resulterende gegevens niet correct zijn en onbruikbaar. Belangrijk is, als een van de camera's worden aangeraakt of verplaatst, is het veiligste om te veronderstellen dat de kalibratie van het systeem moet worden herhaald.
Onmiddellijk voorafgaand aan het plaatsen van het dier in de start-en landingsbaan, het gewicht is opgenomen en pre-en-klare conische reflecterende huid markers (met 3M reflecterende tape, zie tabel) zijn gehouden aan de vooraf bepaalde voelde markeringen op de achterste ledematen topografische bezienswaardigheden. De opname van de dieren zal het mogelijk retrospectieve normalisering van de grond reactie krachten om het lichaamsgewicht - een belangrijk aspect als men wil vergelijkingen tussen groepen te maken. Bovendien, het lichaamsgewicht meten vergemakkelijkt de controle van de algehele gezondheid van het dier voor de duur van het experiment. Marker plaatsing vereist enige geschikte dier omgaan en vereist geen verdoving van het dier. Als de lijm op de reflecterende tape is onvoldoende om zich te houden aan de huid van het dier, kan een zeer kleine hoeveelheid van de niet-giftige lijm (bijv. 3M VetBond Tissue lijm) gebruikt worden om hechting van de marker op het lichaam van het dier te vergemakkelijken. Zodra de markers zijn geplaatst op de achterbenen, moet de onderzoeker comfortabel worden geplaatst in de buurt van het toetsenbord van de computer en hebben in-hand het geval marker aangesloten via de Vicon Motus systeem. Met behulp van de geijkte bestand als een sjabloon, worden een aantal bestanden op voorhand van de opname. Typisch, 25 tot 30 bestanden moeten worden opgeslagen. Elk bestand moet een unieke naam. Elk bestand zal vertegenwoordigen een geregistreerde gegevens van het dier wordt opgenomen. Vijfentwintig tot dertig bestanden zijn vereist om ervoor te zorgen dat er voldoende aantallen loopt die voldoet aan de inclusie criterium snelheid (dwz 60-90 cm / s) worden verzameld. Na voldoende aantallen bestanden worden aangemaakt door de experimentator kan beginnen met het verzamelen van gegevens. Het experimenter moet prompt de rat om shuttle binnen de start-en landingsbaan door het gooien van ¼ stukken van Cheerios aan weerszijden van de landingsbaan. Met een zorgvuldige coördinatie en timing, is het evenement marker geactiveerd bij aanvang en vlak voor de afronding van de rat met succes voltooien van een pass langs de landingsbaan. Na bestudering van de ruwe grond reactiekracht opsporing, en na de opname of het links of rechts ledematen de kracht plaat geraakt, wordt het bestand opgeslagen en gesloten. Gelijke aantallen van de linker en rechter ledematen forceplate bezoeken moeten worden geregistreerd. Het proces van het opnemen van de gegevens van een bepaalde run wordt herhaald totdat voldoende aantallen runs zijn opgenomen.
6. Data Analysis
Bij het voltooien van het verzamelen van gegevens voor de kinematica en de grond reactiekrachten, ieder loopt van elk dier moet worden geëvalueerd voor snelheid. Met behulp van twee relatief vaste markers (bijv. vleugels van de iliums) kan men evalueren een virtueel punt tussen de markers (voor gedaan bij het maken van een Vicon Motus bestand template). Voor de berekening van de snelheid van deze "virtuele" punt, moet markers voor de iliacale markers worden gedigitaliseerd. Met behulp van Vicon motu software, de snelheid van deze virtuele punt in de X-richting (horizontale richting van de beweging) wordt berekend. Daarbij, alleen draait binnen een bepaald bereik snelheden (bepaald a priori) worden gebruikt in de uiteindelijke analyses. We vinden dat dieren die tussen de 60-90 cm / s zijn in overeenstemming draf gangen gebruikt. Een minimum van 10 runs (5 runs waar de linker ledematen contact maakt met de kracht platform en 5 loopt waar de juiste ledematen contact maakt met de kracht platform) zijn vereist. Zodra de aanvaardbare loopt zijn geïdentificeerd voor elk dier, moet digitalisering van de resterende huid markers worden ingevuld.
Om te compenseren voor de huid bewegen artefact over de knie, een raming van de knie positie wordt berekend op basis van triangulatie (snijpunt van twee cirkels 2D kinematica, of kruising tussen de twee bollen 3D-kinematica), zoals eerder beschreven. Heup, knie en spronggewricht hoeken, snelheden en versnellingen kan nu worden bepaald. Houding en swing tijden kunnen ook geëvalueerd worden, maar de nauwkeurigheid is beperkt gebaseerd op de bemonstering snelheid van de camera's wordt gebruikt. Deze en andere berekeningen kunnen direct worden uitgevoerd (dat wil zeggen zonder export) met behulp van Vicon Motus KineCalc software of gegevens kunnen geëxporteerd worden als ASCII-gegevens en geanalyseerd met behulp van aanpasbare routines in de software, zoals MatLab.
De grond reactie kracht data wordt gemeten en versterkt door de Amti kracht platform en verzameld bij 1200 Hz door Vicon Motus. Als zodanig, zodra de grond reactie kracht gegevens worden verzameld, een geschikte digitale filter wordt toegepast op de gegevens met behulp van Vicon Motus. Gezien het feit dat de experimentator al heeft de snelheid van de reis-en geïdentificeerd acceptabele series vastgesteld na digitalisering juiste huid markers, de grond reactiekracht gegevens die tegelijkertijd werd verzameld als de kinematische gegevens kunnen worden geanalyseerd met behulp van Vicon Motus KineCalc direct of indirect gebruik van sommige andere aanpasbare software routine. Een verscheidenheid van variabelen voor krachten, in elk van de drie orthogonale richtingen, kan worden berekend. Dergelijke variabelen zijn piek van kracht, het gebied und de curve (dwz impuls), etc. Het is echter belangrijk, de experimentator moet links en rechts ledematen gegevens gedurende elke run van elk dier afzonderlijk. Gegevens uit rechts of links ledematen is gemiddeld voor elk dier en gebruikt als representatieve gegevens voor dat dier. Gegevens worden vervolgens geanalyseerd met behulp van passende statistische procedures.
7. Representatieve resultaten
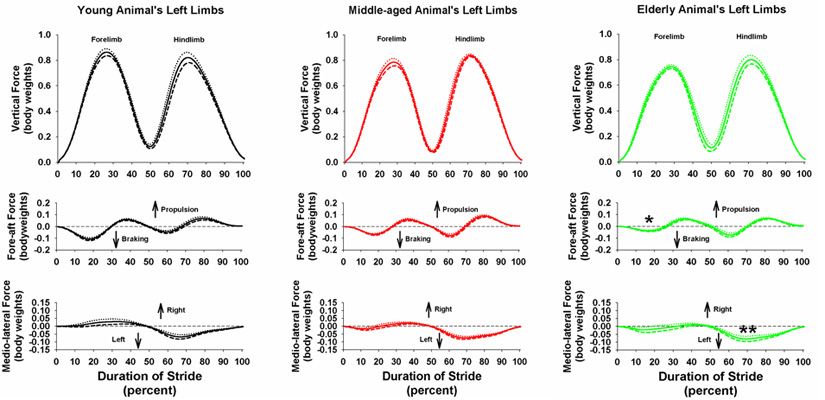
Het behartigen van de nut van deze vorm van motorische analyse werden kinematica en de grond reactiekrachten bepaald voor jonge, middelbare leeftijd, en geriatrische vrouwelijke Wistar ratten. Uit deze analyse werden leeftijd-gerelateerde verschillen gevonden voor vrouwelijke Wistar ratten. In het bijzonder, de grond reactie kracht analyse toont aan dat geriatrische ratten hebben voorpoot remvermogen verminderd en hebben de neiging om hun achterpoten meer te gebruiken voor laterale stabilisatie in vergelijking met de andere groepen van dieren (figuur 1). Kinematische analyse bracht geen statistische verschillen tussen elke groep, maar toont aan dat kinematica gemakkelijk kan worden opgenomen van vrijwel elke leeftijd van de rat (figuur 2).

Figuur 1 Ground reaction force traceren genomen van de linker ledematen van jongeren. (4 maand oud, n = 7), van middelbare leeftijd (13-14 maanden oud is, n = 7), en geriatrische (24 maanden oud; n = 5) vrouwelijke Wistar ratten. Rechts ledematen waren vergelijkbaar. Het is snel duidelijk dat de geriatrische ratten hun voorpoten gebruiken minder voor het remmen (* = p <0,05) ten opzichte van jonge en middelbare leeftijd ratten, en geriatrische ratten hebben de neiging hun achterpoten meer te gebruiken voor laterale stabilisatie in vergelijking met jonge ratten (**). Volle lijnen stellen bedoel, streeplijnen de gemiddelde + SE; stippellijnlijnen zijn gemiddelden SE. U kunt hier klikken voor een grotere afbeelding te zien.

Figuur 2. Kinematisch stick figures voor de linker ledematen van jonge, middelbare leeftijd, en geriatrische ratten. Stok cijfers geven het gemiddelde beweging van de linker ledematen voor elk van de groepen. Er waren geen significante verschillen tussen de groepen van dieren voor de gezamenlijke hoek tijdens de stap cyclus. U kunt hier klikken voor een grotere afbeelding te zien.
Discussion
Het huidige artikel geeft de methodologie voor het evalueren van voortbewegen met behulp van continue kwantitatieve kinematica en op de grond reactie kracht bepalen. Belangrijk voor iedereen die geïnteresseerd is bij het instappen op deze methodiek is een sterke achtergrond in de biomechanica van de motoriek, dier sensomotorische gedrag, en data management en manipulatie. Hoewel de kinematische en de grond reactie kracht bepaling vergt extra tijd en expertise, in vergelijking met enkele andere vormen van bewegings-analyse (bijvoorbeeld eindpunt maatregelen, ordinale schalen), de verkregen data is gevoelig, objectieve en kwantitatieve voor een verscheidenheid van orthopedische 14-22 en neurologische 1-3, 23-32 modellen van de ziekte, in een verscheidenheid van soorten.
We hebben gegevens verstrekt dat de verschillen in beweging tussen de verschillende leeftijden van de stam op elkaar afgestemde ratten informatie die niet kon worden afgeleid met behulp van eenvoudige en minder gevoelig maatregelen beschrijft. Verder is kinematische en kinetische analyse van de voortbeweging gebruikt om bewegingsapparaat veranderingen te beschrijven in een verscheidenheid van het zenuwstelsel situaties waar andere vormen van evaluatie zou zijn mislukt. 8, 23-25, 27 Het gebruik van gevoelige maatregelen wordt met name belangrijk bij het evalueren van potentiële therapeutants voor diverse modellen van de ziekte. Als een test is niet gevoelig genoeg om een effect van een potentiële therapeutant de experimentator loopt het risico van het plegen van een type-II-statistische fout te onderscheiden (dat wil zeggen het sluiten is er geen effect van een behandeling terwijl het in feite was er een effect). Verder, want eindpunt maatregelen en meer subjectieve tests die motoriek te beoordelen, bestaat er een potentieel voor bias. Kinematische en kinetische evaluatie is zuiver objectief in dat, mits passende insluiting / uitsluiting criterium zijn gemaakt a priori, de experimentator gewoon verzamelt, onderzoekt en past geschikte statistische methoden de gegevens (dwz er is geen subjectieve component om gegevens te bepalen).
Kinematische en kinetische analyse biedt ook de mogelijkheid om te worden gebruikt voor een veelheid van soorten. In feite hebben kinematica, grond reactiekracht bepaling of beide gebruikt in een verscheidenheid van soorten, zoals olifanten 33-35, 36 koeien, paarden 37-40, honden 4, 41-45, 21 katten, 46-49, diverse knaagdieren 3, 8, 50, 51, 4 vogels, 52-55, en vis 56, 57 (deze lijst is niet uitputtend). In de auteurs ervaring, echter, het gebruik van muizen is problematisch, gezien het feit dat muizen niet gemakkelijk te operantly voorwaarde om te reizen langs een landingsbaan. Gezien deze zullen muizen niet reizen op een relatief constante snelheid en in plaats daarvan speed-up en de vertraging bij het doorkruisen van de start-en landingsbaan. Dit gedrag kan waarschijnlijk voor een deel ondervangen worden door het uitvoeren van muizen op een loopband en video-taping het dier locomoting op de loopband. 58 Als de experimentele apparatuur voor de grond reactie kracht vastbesloten was om te worden aangepast voor gebruik loopband, de grond reactiekracht bepaling zou waarschijnlijk alleen gemakkelijk verkregen voor verticale grond reactie kracht als de loopband gordel zou interfereren met voor-achter en medio-laterale kracht bepalen.
Al met al, kinematische en kinetische analyse van de beweging is een betrouwbare, gevoelige, en objectieve methode die kan worden ingezet voor diverse modellen van orthopedische en neurologische aandoeningen. Bovendien heeft al het materiaal beschikbaar gesteld voor gebruik bij knaagdieren, dus ontkennen alle gerelateerde reden voor het niet uitvoeren van deze vorm van sensorimotorische gedragsanalyse.
Disclosures
Geen belangenconflicten verklaard.
Acknowledgments
Dit onderzoek werd ondersteund door een Discovery Grant AAW van het Natural Sciences and Engineering Research Council van Canada.
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J.
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M.
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R.
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}