

Summary
Locomotion wird oft als ein Verhaltens-Ergebnis in verschiedene Modelle der Krankheit in Bereichen wie Neurologie und Orthopädie untersucht. Dieses Video Papier beabsichtigt, eine Methode zur Erfassung der Bodenreaktionskräfte und Kinematik von Ratten während der hemmungslosen Bewegung zu beschreiben.
Abstract
Verhalten, in seiner ganzen Bandbreite, kann der Motor Manifestation der physiologischen Prozesse definiert werden. Als solche manifest alle Verhaltensweisen durch das motorische System. In den Bereichen der Neurowissenschaften und Orthopädie, ist Bewegung ein allgemein beurteilt das Verhalten für eine Vielzahl von Krankheiten Modelle. Zum Beispiel ist Bewegungsapparates Erholung nach traumatischen Verletzungen des Nervensystems eine der am häufigsten bewertet Verhaltensweisen 1-3. Obwohl Fortbewegung kann unter Verwendung einer Vielzahl von Endpunkt-Messungen (z. B. Zeit, um eine Bewegungs-Aufgabe, etc komplett), semiquantitative kinematische Maßnahmen (zB ordinale Skalen (zB Basso Beattie und Bresnahan Bewegungsapparates (BBB) Rating-Skala, etc)) und Ersatz werden Maßnahmen des Verhaltens (zB Muskelkraft, Nervenleitgeschwindigkeit, etc), nur Kinetik (Kraftmessungen) und Kinematik (Messungen der Körpersegmente im Raum) eine ausführliche Beschreibung der Strategie, mit der ein Tier in der Lage ist zu 1 fortbewegen. Obwohl nicht neu, kinematische und kinetische Messungen von locomoting Nagetieren ist jetzt leichter zugänglich aufgrund der Verfügbarkeit von kommerziell erhältlichen Geräte für diesen Zweck konzipiert. Wichtig ist jedoch, müssen Experimentatoren zu sehr vertraut mit der Theorie der biomechanischen Analysen und verstehen die Vorteile und Grenzen dieser Formen von Analysen vor Einschiffung auf das, was eine relativ arbeitsintensive studieren. Die vorliegende Arbeit soll eine Methode zur Erfassung von kinematischen und Bodenreaktionskraft Daten mit den handelsüblichen Geräten beschreiben. Details der Einrichtung und Ausstattung von Set-up, sind vor dem Training der Tiere, Ein-und Ausschlusskriterien des zulässigen läuft, und Methoden für die Erhebung der Daten beschrieben. Wir illustrieren den Nutzen dieser Verhaltensanalyse-Technik durch die Beschreibung der Kinematik und Kinetik der Belastung angepassten jungen Erwachsenen mittleren Alters, und geriatrische Ratten.
Protocol
1. Voraussetzungen für die biomechanische Analysen Locomotion
Vor Einschiffung auf den Ankauf teurer Bewegungsapparates Analyse Ausrüstung und Planung von Experimenten, wo Kinematik und / oder kinetische Bewegungsapparates Beurteilung durchgeführt wird, ist es unerlässlich, dass der Experimentator mit den technischen und praktischen Aspekte der biomechanischen Analysen werden, sensomotorische Verhalten, operante Konditionierung von Tieren und Handhabung / Lagerung / Verwaltung großer Mengen an digitalen Daten. Obwohl diese Voraussetzungen offensichtlich viele scheinen, ist es nur nach der Einschiffung auf diese Art von Experimenten, in denen Auszubildende realisieren die technischen und praktischen Komplexität der Durchführung relativ detaillierte Bewegungs-Analyse. Die Autoren empfehlen, Experimentatoren in einem Kurs den Umgang mit einleitenden Biomechanik einschreiben, werden vertraut mit oder mieten Sie jemandem vertraut mit einer Programmiersprache für die Datenverwaltung erforderlich, und von gleicher Bedeutung, verbringen viel Zeit interagieren, Handhabung und Umgang mit Versuchstieren. Für das Verständnis Fortbewegung Analyse und sensomotorischen Verhaltensanalyse in den Neurowissenschaften, sind Experimentatoren einige wichtige Hinweise bezeichnet (siehe 1, 4-7).
2. Kinematischen und kinetischen Prüfgeräte
Eine kinematische und kinetische Prüfgeräte, nützlich für die Erhebung der bilateralen Daten wird aus den folgenden Komponenten (siehe "Tabelle der spezifischen Reagenzien und Ausrüstung" für weitere Details) zusammen:
- Ruhig und ausreichend großer Raum (nicht unbedingt schalldicht, wenn auch in geringem Verkehrsaufkommen Bereich)
- Radio zum "Hintergrundrauschen" liefern, um störende Geräusche von außerhalb des Raumes zu begrenzen, um Tiere
- Klare Plexiglas, geschlossenen, flachen Oberfläche Start-und Landebahn (180 cm lang x 20 cm breit x 60 cm hoch) mit einem viereckigen Loch (11 cm X 11 cm) in der Mitte der Landebahn gleich weit von beiden Enden entfernt
- Piece of Plexiglas (10,5 cm x 10,5 cm)
- Doppelseitig klebenden Klebeband
- 3M reflektierende Klebeband für Hautmarker
- Lochung für die Erstellung von Hautmarker
- Isofluoran Narkosegerät für Anästhesie Tiere für die Rasur vor der Platzierung der Haut Marker erforderlich
- Cheerios zur Förderung Bewegung des Tieres entlang der Länge der Start-und Landebahn
- AMTI HE6X6 Kraftmessplatte
- Vicon Motus maßgeschneidertes System (Software, Computer, etc.)
- 4 Video-Kameras (mindestens 60 Hz sampling) und Stative mit entsprechenden Anschlusskabeln
- 4 Kamera montiert Halogenlampen sorgt für eine optimale Beleuchtung zur Ausleuchtung des tierischen Patienten und der reflektierenden Hautmarker
- Angemessene Größe Kalibrierung Rahmen oder notwendige Volumen für Vicon Motus System x, y, z-Positionen in sinnvolle Distanzmaße kalibrieren
3. Animal Training
Vor der Datenerhebung, muss jedes Tier geschult, um eine ebene Oberfläche, geschlossene Start-und Landebahn zu überqueren. Nach Erhalt Ratten aus einem geeigneten Tierversuch Anbieter, sollten die Tiere in ihre neue Heimat für 1 Woche akklimatisiert werden. Während dieser Gewöhnungsphase Zeit sind mehrere cheerios täglich in der Ratte in den Käfig gelegt. Die Tiere sind Nahrung beschränkt, ihre Wartung Energiebedarf zu Übergewicht zu verhindern und die Motivation für diese Aufgabe. Danach wird jedes Tier vom Versuchsleiter für 10-15 Minuten täglich für 1 Woche behandelt. Während dieser Zeit wird jedes Tier in die Start-und Landebahn mit cheerios an beiden Enden platziert. Sobald das Tier wird sich mit ihrer Umwelt, werden sie anfangen zu essen die cheerios. Sobald das Tier ist bequem und essen cheerios innerhalb der Start-und Landebahn, muss der Experimentator dann operant Zustand des Tieres, um die Länge der Start-und Landebahn für ein Lebensmittel Belohnung ausgeführt werden. Dies ist durch das Werfen ¼ cheerio zum entgegengesetzten Ende der Landebahn, wo die Ratten positioniert ist vollbracht. Sobald die Ratte frisst diese cheerio, ist ein weiteres ¼ cheerio am anderen Ende der Start-und Landebahn gestellt. Dies ist für 15-20 Minuten täglich, bis die Ratte konsequent (> 90% der Würfe) bewegt sich entlang der Start-und Landebahn mit einer konstanten Geschwindigkeit durchgeführt (dh ohne das Starten, Stoppen, zu erforschen, oder ohne Gang), um die cheerio ohne Galopp / bounding essen . Die Ratte sollte nur unter Verwendung eines Trab Gang. Over-Konditionierung der Tiere, um diese Aufgabe können Tieren führen galoppieren und begrenzenden diese Gangarten sind bezeichnend für Tiere Reisen> 90 cm / s. Bounding und Galopp Gangarten, biomechanisch, sind schwieriger zu für eine Vielzahl von Gründen (z. B. Bein führen Einschlusskriterien, etc) zu interpretieren. In unserer Erfahrung, einmal Ratten konsequent durchziehen galoppieren oder begrenzenden Grundgangarten, ist es schwierig, wenn nicht unmöglich, haben sie einen Trab Gang, während locomoting in der Start-und Landebahn. Geschwindigkeiten> 90 cm / s werden nur selten gesehen, nachdem ein Tier aus dem peripheren oder zentralen Nervensystem Verletzungen erlitten hat. Zeit für eine erfolgreiche Ausbildung zu erreichen, ist variaBLE zwischen Stämmen und Geschlechtern von Ratten. Wistar, Lewis, Long-Evans und Sprague-Dawley-Stämme sind in der Lage, konsequent durchziehen die Start-und Landebahn innerhalb von 2 Wochen ab Beginn der Ausbildung 8. Nach unseren Erfahrungen neigen Fischer (F-344) Ratten nach oben von 4-6 Wochen dauern, bis diese Aufgabe 8 zu lernen.
4. Gemeinsame Position Marking
Vorderbein kinematische Analyse ist unzuverlässig wegen Haut Bewegung Artefakt, indem Haut Markierungen auf der Vorderbeine, die in Arten verschärft wird, wie die Ratten, die eine geduckte Körperhaltung 9 haben verhängt. Stattdessen müssen Kinematik der Vorderbeine erreicht mit Röntgen-Kinematografie oder Durchleuchtung 10-13 sein. Als solches Hinterbein gemeinsame Position Marker Platzierung ist nur hier beschrieben.
Vor der Datenerhebung, muss jede Ratte narkotisiert werden mindestens 24 Stunden im Voraus über die Datenerhebung mit Hilfe eines geeigneten Inhalationsanästhetika (z. B. Isofluoran, 1.5-2% gewählt auf einer Präzisionswaage vaporizor) und verwaltet in Sauerstoff über Maske, und die wichtigsten topographischen Anatomie Landmarken markiert werden muss. Angesichts der Kürze des Verfahrens, und weil lang wirkenden Anästhetika nicht verwendet werden, der ein Tier Erwärmung Gerät benutzen müssen nicht verwendet werden, um das Tier seine Körpertemperatur zu halten. Sobald das Tier narkotisiert, sind die hinteren Gliedmaßen und dem Rücken, auf der Ebene der Beckenkamm rasiert. Das Tier wird dann in Brustlage gelegt und seine Hinterbeine sind in einer ungefähren stehender Position mit festen Packung Schaum zu unterstützen platziert. Die Haut über den Schädel und die meisten Teile der Beckenkamm, wird der Trochanter major des Oberschenkelknochens, die seitlichen Tuberositas, der Sprunggelenk und den distalen und lateralen Seite des 5 th Mittelfußknochen mit einer ungiftigen Filzstift markiert. Das Tier ist aus der Narkose erholt. Für zeitliche Studien kann eine periodische Narkose erforderlich, um die Hinterbeine wodurch eine spätere reflektierende Marker Platzierung (siehe unten) rasieren. Außerdem werden täglich Hervorhebung des zuvor markierten anatomischen Landmarken (mit der gleichen ungiftig Marker) erforderlich, da Ratten langsam entfernen Sie die Markierungen durch natürliche Pflege Verhalten sein.
5. Datenaufzeichnung
Alle Kamera-Ansichten werden untersucht, um sicherzustellen, dass ihre Position angemessen und Erfassung der gleichen Sichtfeld ist. Jede Kamera sollte bei ca. 60-80 Grad zueinander angeordnet werden. Das Sichtfeld sollte die Kraftmessplatte in der Mitte und einer Länge von Start-und Landebahn aus, um zwei Schritte zu erfassen.
Die Kalibrierung Volumen ist innerhalb der vorgegebenen Bereich der Start-und Landebahn gestellt. Ein einzelnes Bild der Kalibrierung Volumen innerhalb der Start-und Landebahn, von jeder der Kameras erfasst wird. Alle kalibrierten Markierungen entlang der Länge der einzelnen Stangen sind digitalisiert. Nur einmal eine zufriedenstellende Fehler bei der Digitalisierung erreicht ist, kann der Experimentator vor dem Sammeln Bewegungsapparates Daten. Diese Kalibrierung Schritt ist wichtig vor dem Sammeln von Daten. Wenn die Kalibrierung nicht durchgeführt wird genau, oder wenn die Kalibrierung nicht sofort geschehen, bevor eine Aufnahme-Session werden alle resultierenden Daten ungenau und unbrauchbar. Wichtig ist, dass, wenn eine der Kameras berührt oder bewegt, ist es am sichersten, anzunehmen, dass die Kalibrierung des Systems muss wiederholt werden.
Unmittelbar vor dem Einbringen des Tieres in der Start-und Landebahn, sein Gewicht wird aufgezeichnet und vorgefertigte konische reflektierenden Haut Marker (mit 3M Reflexstreifen, siehe Tabelle) sind die vorgegebenen fühlte Markierungen auf der hinteren Gliedmaßen topographischen Landmarken gemacht eingehalten werden. Recording das Gewicht des Tieres wird erlauben Retrospektive Normalisierung der Bodenreaktionskräfte auf das Körpergewicht - ein wichtiger Aspekt, wenn man will Vergleiche zwischen den Gruppen zu machen. Darüber hinaus erleichtert das Körpergewicht Messung, Überwachung des Tieres den allgemeinen Gesundheitszustand für die Dauer des Experiments. Marker Platzierung benötigt nur artgerechte Handhabung und erfordert keine Narkose des Tieres. Wenn der Klebstoff auf die Reflexfolie nicht ausreicht, um auf der Haut des Tieres halten, kann eine sehr kleine Menge von nicht-toxischen Kleber (zB 3M VetBond Gewebekleber) verwendet, um die Einhaltung der Marker auf dem Körper des Tieres zu erleichtern. Sobald der Marker auf die Hinterbeine gestellt werden, sollte der Experimentator bequem in der Nähe der Tastatur des Computers positioniert und haben in Hand der Veranstaltung Marker durch die Vicon Motus System angeschlossen. Mit den kalibrierten Datei als Vorlage, mehrere Dateien im Vorfeld der Aufnahme gemacht. Normalerweise müssen 25 bis 30 Dateien gespeichert werden. Jede Datei sollte eindeutig benannt werden. Jede Datei wird stellen eine aufgezeichnete des Tieres aufgezeichnet laufen. Fünfundzwanzig bis 30 Dateien sind erforderlich, um sicherzustellen, dass eine ausreichende Anzahl von Läufen, die die Einschlusskriterien Kriterium Geschwindigkeit (dh 60-90 cm / s) erhoben werden. Nach einer ausreichenden Zahl von Dateien erstellt der Experimentator kann mit der Datenerhebung beginnen. Die experimenter muss die Ratte zu Shuttle prompt innerhalb der Start-und Landebahn durch das Werfen ¼ Stücke cheerios an beiden Enden der Landebahn. Mit einer sorgfältigen Koordination und Timing, ist der Event-Marker bei der Initiierung ausgelöst und kurz vor dem Abschluss der Ratte erfolgreichem Abschluss einen Pass entlang der Start-und Landebahn. Nach Prüfung der Roh Bodenreaktionskraft Tracing, und nach der Aufnahme, ob die linke oder die rechte Glieder der Kraftplatte getroffen, wird die Datei gespeichert und geschlossen. Gleich viele linke und rechte Bein Kraftmessplatte Treffer sollte aufgezeichnet werden. Der Prozess der Aufnahme der Daten aus einer vorgegebenen Laufzeit wird wiederholt, bis eine ausreichende Anzahl von Durchläufen aufgezeichnet wurden.
6. Data Analysis
Nach Abschluss der Datenerhebung für die Kinematik und Bodenreaktionskräfte, muss jedem Lauf von jedem Tier für die Geschwindigkeit ausgewertet werden. Mit Hilfe von zwei relativ festen Markern (zB Flügel der iliums) kann man beurteilen einen virtuellen Punkt zwischen den Markern (vor bei der Erstellung eines Vicon Motus Dateivorlage getan). Vor der Berechnung der Geschwindigkeit dieser "virtuellen" Punkt muss Marker für die iliaca Marker digitalisiert werden. Mit Vicon Motus Software, Geschwindigkeit dieser virtuellen Punkt in X-Richtung (horizontal in Bewegungsrichtung) wird berechnet. Dabei läuft nur innerhalb eines bestimmten Bereichs Geschwindigkeiten (bestimmt a priori) sind in den letzten Analysen verwendet. Wir finden, dass Tiere, die zwischen 60-90 cm / s sind nach einheitlichen Trab Gangarten. Ein Minimum von 10 Läufen (5 läuft, wo der linke Bein in Kontakt mit der Kraft-Plattform und 5 verläuft, wo das Recht des Körpers in Kontakt mit der Kraft-Plattform) erforderlich sind. Sobald die akzeptabel läuft für jedes Tier identifiziert werden, muss die Digitalisierung der übrigen Haut Marker abgeschlossen sein.
Um für die Haut Bewegung Artefakt über das Knie zu kompensieren, die Einschätzung des Knies Position errechnet Triangulation (Kreuzung zwischen zwei Kreisen 2D-Kinematik, oder Schnittpunkte zwischen 2 Kugeln 3D Kinematik), wie bereits zuvor beschrieben. Hüft-, Knie und Sprunggelenk Winkeln, Geschwindigkeiten und Beschleunigungen kann nun bestimmt werden. Stand-und Schwungphase Zeiten können auch ausgewertet werden, wenn ihre Genauigkeit auf der Grundlage der Abtastrate der Kameras werden eingesetzt begrenzt ist. Diese und andere Berechnungen können direkt ausgeführt werden (dh ohne Export) mit Vicon Motus KineCalc Software oder Daten können als ASCII Daten exportiert und analysiert werden mit Hilfe von anpassbaren Routinen in Software wie MATLAB.
Bodenreaktionskraft Daten gemessen und durch die AMTI Kraft-Plattform verstärkt und gesammelt bei 1200 Hz von Vicon Motus. Als solcher, sobald die Bodenreaktionskraft Daten gesammelt werden, eine geeignete digitale Filter, um die Daten mit Vicon Motus angewendet wird. Da der Experimentator hat bereits die Fahrgeschwindigkeit und identifiziert akzeptabel läuft nach der Digitalisierung angemessene Hautmarker, Bodenreaktionskraft Daten, die gleichzeitig als kinematische Daten erhoben wurden, analysiert werden mit Vicon Motus KineCalc direkt oder indirekt über eine andere anpassbare Software bestimmt werden Routine. Eine Vielzahl von Variablen für Kräfte, in jeder der drei orthogonalen Richtungen, berechnet werden kann. Solche Variablen sind Spitzenkraft, Fläche und die Kurve (dh Impuls), etc. Wichtig ist jedoch, den Experimentator muss rechts und links des Körpers Daten für jeden Durchlauf der einzelnen Tiere zu trennen. Daten von rechts oder links Gliedmaßen extrahiert wird für jedes Tier gemittelt und als repräsentative Daten für dieses Tier. Die Daten werden dann mit Hilfe geeigneter statistischer Verfahren.
7. Repräsentative Ergebnisse
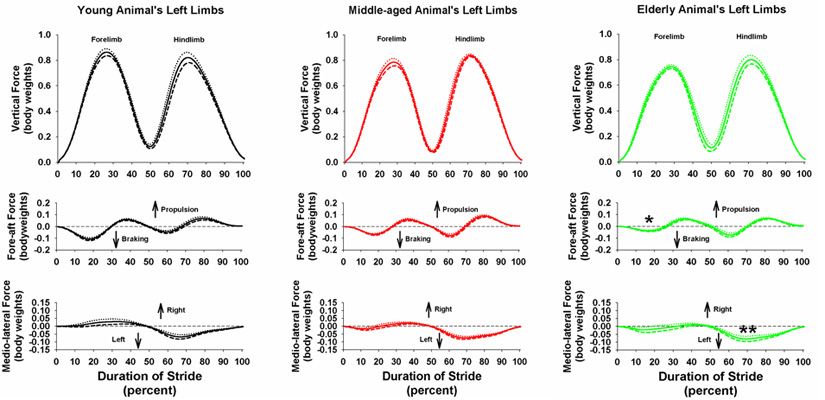
Zur Darstellung der Nutzen dieser Form des Bewegungsapparates Analyse wurden Kinematik und Bodenreaktionskräfte für junge, im mittleren Alter, und geriatrische weibliche Wistar-Ratten bestimmt. Aus dieser Analyse wurden altersbedingte Unterschiede bei weiblichen Wistar-Ratten gefunden. Insbesondere zeigt Bodenreaktionskraft Analyse, dass geriatrische Ratten haben forelimb Bremsen Fähigkeit reduziert, und neigen dazu, ihre Hinterbeine mehr zur seitlichen Stabilisierung Nutzung im Vergleich zu anderen Tiergruppen (Abbildung 1). Kinematische Analyse ergab keine statistischen Unterschiede zwischen den einzelnen Gruppen, aber zeigt, dass Kinematik leicht aus nahezu jedem Zeitalter der Ratte (Abb. 2) aufgezeichnet werden.

Abbildung 1 Bodenreaktionskraft Tracing von der linken Extremitäten junger genommen. (4 Monate alt, n = 7), im mittleren Alter (13-14 Monate alt; n = 7), und geriatrischen (24 Monate alt, n = 5) weibliche Wistar-Ratten. Rechten Extremitäten waren ähnlich. Es ist leicht ersichtlich, dass geriatrische Ratten ihre Vorderbeine verbrauchen weniger zum Abbremsen (* = p <0,05) im Vergleich zu jungen und mittleren Alters Ratten und geriatrische Ratten neigen dazu, ihre Hinterbeine mehr zur seitlichen Stabilisierung im Vergleich zu jungen Ratten verwenden (**). Die durchgezogenen Linien repräsentieren den Mittelwert, gestrichelte Linien stellen Mittelwerte + SE, gestrichelteLinien stellen Mittelwerte SE. Bitte klicken Sie hier, um eine größere Abbildung zu sehen.

Abbildung 2. Kinematische Strichmännchen für den linken Schenkel des jungen, mittleren Alters und geriatrische Ratten. Strichmännchen stellen den Mittelwert Bewegung der linken Gliedmaßen für jede der Gruppen. Es gab keine signifikanten Unterschiede zwischen den Gruppen von Tieren für Gelenkwinkel während der Schritt-Zyklus. Bitte klicken Sie hier, um eine größere Abbildung zu sehen.
Discussion
Das vorliegende Papier stellt Methodik für die Bewertung Fortbewegung mittels kontinuierlichen quantitativen Kinematik und Bodenreaktionskraft Entschlossenheit. Wichtig für alle, die Einschiffung auf diese Methodik interessiert ist, einen starken Hintergrund in der Biomechanik der Fortbewegung, Tier sensomotorische Verhalten und Daten-Management und-manipulation. Obwohl kinematischen und Bodenreaktionskraft Bestimmung erfordert zusätzliche Zeit und Know-how im Vergleich zu einigen anderen Formen der Bewegungs-Analyse (zB Endpunkt Maßnahmen, ordinal Rating-Skalen), wird die gewonnenen Daten sensibel, objektive und quantitative für eine Vielzahl von orthopädischen 14-22 und neurologischen 1-3, 23-32 Modelle der Krankheit, in einer Vielzahl von Arten.
Wir haben Daten, die Unterschiede in der Fortbewegung zwischen den verschiedenen Altersstufen der Belastung abgestimmten Ratten Informationen, die nicht sein könnten aufgelesen mit einfachen und weniger empfindlich Maßnahmen beschreibt Verfügung gestellt. Ferner hat kinematische und kinetische Analyse der Fortbewegung benutzt worden, um Bewegungs-Änderungen in einer Vielzahl von ZNS-Bedingungen, bei denen andere Formen der Evaluation erfolglos bezeichnen würden. 8, 23-25, 27 Die Verwendung von sensiblen Maßnahmen wird besonders wichtig bei der Beurteilung potenzieller Therapeutika für verschiedene Modelle von Krankheit. Wenn ein Test ist nicht empfindlich genug, um einen Effekt einer möglichen therapeutant der Experimentator die Gefahr der Begehung einer Typ-II statistische Fehler zu erkennen (dh Abschluss gibt es keine Wirkung einer Behandlung, wenn in der Tat gab es einen Effekt). Da ferner Endpunkt Maßnahmen und subjektive Tests, die Fortbewegung zu bewerten, gibt es ein Potential für Bias. Kinematische und kinetische Auswertung ist rein objektiv, dass, sofern geeignete Inklusion / Exklusion Kriterium gemacht werden a priori, der Experimentator einfach sammelt, prüft und gilt entsprechende Statistiken zu den Daten (dh es gibt keine subjektive Komponente, um Daten-Bestimmung).
Kinematische und kinetische Analyse bietet auch die Möglichkeit, für eine Vielzahl von Arten genutzt werden. In der Tat haben Kinematik, Bodenreaktionskraft Bestimmung, oder beide in einer Vielzahl von Tierarten wie Elefanten 33-35, Rinder 36, Pferde 37-40, Hunde 4, 41-45, Katzen 21, 46-49, verschiedene benutzt worden Nagetiere 3, 8, 50, 51, Vögel 4, 52-55, und Fisch 56, 57 (diese Liste ist nicht erschöpfend). In der Erfahrung des Autors, jedoch ist die Verwendung von Mäusen problematisch gegeben, dass Mäuse, die nicht leicht zu operant Zustand entlang einer Piste fahren. Vor diesem Hintergrund werden die Mäuse nicht auf einem relativ konstanten Geschwindigkeit fahren und stattdessen speed-up und Verlangsamung beim Durchlaufen der Start-und Landebahn. Dieses Verhalten kann wahrscheinlich zum Teil durch Ausführen von Mäusen auf einem Laufband und Video-Taping das Tier locomoting auf dem Laufband. 58 überwunden werden, ob die experimentelle Vorrichtung zur Bodenreaktionskraft Bestimmung war es, für Laufband Nutzung geändert werden, würde Bodenreaktionskraft Bestimmung wahrscheinlich nur leicht für die vertikale Bodenreaktionskraft erhalten, wie das Laufband mit Vorwärts-Rückwärts-und medio-lateral Kraft Bestimmung stören würde.
Insgesamt ist kinematische und kinetische Analyse der Fortbewegung eine zuverlässige, sensitive und objektive Methode, die für verschiedene Modelle von orthopädischen und neurologischen Erkrankungen eingesetzt werden können. Darüber hinaus hat die gesamte Ausrüstung wird für den Einsatz in Nagetieren zur Verfügung und negiert damit alle damit verbundenen Grund für die nicht die Durchführung dieser Form der sensomotorischen Verhaltensanalyse.
Disclosures
Keine Interessenskonflikte erklärt.
Acknowledgments
Diese Arbeit wurde durch ein Discovery-Stipendium unterstützt werden, um aus dem Natural Sciences and Engineering Research Council of Canada AAW.
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J.
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M.
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R.
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}