Summary
हम ठीक से परिभाषित फीचर बदलाव के साथ प्राकृतिक 3-D वस्तुओं और वस्तु श्रेणियों बनाने के लिए एक उपन्यास पद्धति का वर्णन. हम morphogenesis और उपन्यास, प्राकृतिक आभासी 3-D वस्तुओं और वस्तु श्रेणियों है कि फिर दृश्य छवियों या haptic वस्तुओं के रूप में गाया जा सकता है बनाने के लिए मनुष्य का बढ़ाव के जैविक प्रक्रियाओं के सिमुलेशन का उपयोग करें.
Protocol
1. प्राकृतिक वर्चुअल 3-D VM उपयोग की वस्तुओं का निर्माण
- डिजिटल भ्रूण बनाने, डिजिटल भ्रूण कार्यशाला का उपयोग (ओस, 1 टेबल देखें). प्रत्येक रन एक एकल 14 भ्रूण, आकार जो सेटिंग्स दिए गए रन (1 चित्रा) के लिए इस्तेमाल किया (या 'जीनोटाइप') की एक दिए गए सेट के लिए अद्वितीय है उत्पन्न करता है. भ्रूण की कोशिकाओं '' 14 त्रिकोण के रूप में प्रतिनिधित्व कर रहे हैं.
- कई बार के रूप में भ्रूण की वांछित संख्या उत्पन्न करने की जरूरत के रूप में कार्यक्रम चलाएं.
- यदि अधिक जटिल आकृतियाँ वांछित हैं, बार भ्रूण की कोशिकाओं के विभाजन की संख्या यानी विकास चक्र की संख्या में वृद्धि हुई है. ध्यान दें कि यह भी नीचे कार्यक्रम में धीमी हो जाएगी. यदि यह आभासी डिजिटल भ्रूण के अलावा अन्य वस्तुओं को बनाने के लिए आवश्यक है, व्यावसायिक रूप से उपलब्ध 3 डी मॉडलिंग उपकरण का उपयोग करें या वाणिज्यिक विक्रेताओं (1 टेबल) से आभासी वस्तुओं को प्राप्त करने के.
- आमतौर पर यह सलाह दी जाती है आभासी वस्तु को बचानेOBJ के रूप में आमतौर पर इस्तेमाल किया फ़ाइल स्वरूप है, तो यह है कि वस्तुओं एक वाणिज्यिक मॉडलिंग 3-D टूलकिट में आसानी से आयात किया जा सकता है. यह अंत करने के लिए, ओस डिफ़ॉल्ट OBJ प्रारूप में वस्तुओं लिखता है.
- दृश्य उत्तेजनाओं एक या एक से अधिक डिजिटल एक 3-D मॉडलिंग और प्रतिपादन वातावरण (1 टेबल) का उपयोग भ्रूण का उपयोग कर उत्पन्न किया जा सकता है. अभिविन्यास, आकार, प्रकाश, सतह बनावट और वांछित उत्तेजनाओं (चित्रा 2 देखें) की पृष्ठभूमि अलग रूप में मानक चित्रमय संचालन का प्रयोग करें.
2. प्राकृतिक वस्तु वी.पी. का उपयोग कर श्रेणियाँ बनाना
- वस्तु श्रेणियों उत्पन्न करने के लिए, दिया (या माता पिता ') पूर्वज वस्तु (या' बच्चों ') वंश ऊपर 1.1 चरण में प्रक्रियाओं की एक वांछित संयोजन (3 चित्रा) 9,10,12,13 का उपयोग उत्पन्न करते हैं.
- कुछ तरीकों morphing या प्रमुख घटकों (3 कदम और 4 से नीचे देखें) के रूप में चिकनी आकार विविधताओं, काम bett बनाने के लिए नीचे वर्णितएर अगर सभी इनपुट वस्तुओं कोशिकाओं के एक ही नंबर है और अगर वस्तुओं के कोने में एक से एक पत्राचार है. इस तरह की वस्तुओं को बनाने के लिए, केवल उन VM प्रक्रियाओं है कि कोशिकाओं की संख्या नहीं बदलने के लिए और वस्तुओं के बीच कोने की एक से एक पत्राचार की रक्षा (देखें, जैसे, 3 जी 3 चित्र में पीढ़ियों 2 जी) का उपयोग करें. उदाहरण के लिए, कोशिका विभाजन और क्रमादेशित कोशिका मृत्यु कोशिकाओं की संख्या में परिवर्तन, और यह बहुत कठिन बनाने के लिए (हालांकि असंभव 17,18 नहीं) के लिए वस्तुओं की एक जोड़ी के कोने के बीच एक से एक पत्राचार निर्धारित.
ध्यान दें कि प्रक्रियाओं है कि किसी भी वस्तु में कोशिकाओं की संख्या में परिवर्तन भी अपने आकार की जटिलता को बदल. सामान्य में, कोशिकाओं की संख्या अधिक से अधिक है, अधिक से अधिक वस्तु के आकार और जटिलता और इसकी सतह चिकनी है. - यदि आवश्यक हो, आभासी डिजिटल भ्रूण के अलावा अन्य वस्तुओं के VP को आदानों (चित्रा 4) के रूप में इस्तेमाल किया जा सकता है.
- कुछ तरीकों morphing या प्रमुख घटकों (3 कदम और 4 से नीचे देखें) के रूप में चिकनी आकार विविधताओं, काम bett बनाने के लिए नीचे वर्णितएर अगर सभी इनपुट वस्तुओं कोशिकाओं के एक ही नंबर है और अगर वस्तुओं के कोने में एक से एक पत्राचार है. इस तरह की वस्तुओं को बनाने के लिए, केवल उन VM प्रक्रियाओं है कि कोशिकाओं की संख्या नहीं बदलने के लिए और वस्तुओं के बीच कोने की एक से एक पत्राचार की रक्षा (देखें, जैसे, 3 जी 3 चित्र में पीढ़ियों 2 जी) का उपयोग करें. उदाहरण के लिए, कोशिका विभाजन और क्रमादेशित कोशिका मृत्यु कोशिकाओं की संख्या में परिवर्तन, और यह बहुत कठिन बनाने के लिए (हालांकि असंभव 17,18 नहीं) के लिए वस्तुओं की एक जोड़ी के कोने के बीच एक से एक पत्राचार निर्धारित.
- आगे तो एक दिया वर्ग के भीतर वस्तुओं के रूप में 19 सुविधाओं का भी वितरण को प्राप्त करने के लिए चुना जा सकता है. उदाहरण के लिए, एक चुनिंदा एक दिया वर्ग से मध्य आकार की वस्तुओं को समाप्त कर सकते हैं क्रम में वस्तु के आकार की एक bimodal वितरण उत्पन्न करने के लिए.
- वहाँ कोई एक विधि है कि सभी श्रेणियों के लिए उपलब्ध आकार जानकारी को मापने के लिए सार्वभौमिक इष्टतम है, और न ही वहाँ एक ही विधि है कि सभी वस्तुओं categorizing 20-22 के लिए इष्टतम है. इस प्रकार, experimentor इन श्रेणियों और 20-22 हाथ में कम्प्यूटेशनल लक्ष्यों पर आधारित विधियों का चयन करना होगा. चरण 4 उपलब्ध आकार जानकारी के विभिन्न पहलुओं को जोड़ तोड़ के लिए आमतौर पर इस्तेमाल किया विधि का वर्णन है.
- श्रेणियों की एक जोड़ी के बीच समानता निष्पक्ष उपलब्ध वंशावली तरीकों 23,24 का उपयोग करके मापा जा सकता है. उदाहरण के लिए, श्रेणियों की एक जोड़ी के बीच खड़ी दूरी (या 'विकासवादी'), के रूप में श्रेणीबद्ध सीएल द्वारा मापाआर सांख्यिकीय Toolkit में तरीकों ustering, वर्ग 25,26 समानता का एक उद्देश्य उपाय है.
3. आकार रूपांतर बनाने के अतिरिक्त तरीके: डिजिटल Morphing
- वस्तुओं के किसी भी जोड़ी तो यह देखते हुए कि एक वस्तु के हर शिखर वास्तव में एक अन्य वस्तु (यानी, कोने के बीच एक से एक पत्राचार के साथ वस्तुओं) के शीर्ष से मेल खाती है, morphing 17,18,27-29 सरल है: इस में मामले में, दो वस्तुओं के बीच चिकनी रूपों (या 'morphs') आसानी से इसी कोने और normals (5 चित्रा) के बीच interpolating द्वारा उत्पादित कर रहे हैं. चुना वस्तुओं की जोड़ी पर निर्भर करता है, morphing नई श्रेणियों या एक वर्ग के भीतर अतिरिक्त बच्चों में परिणाम देगा.
- चित्रा 5 में दिखाया वस्तुओं रैखिक morphing 27-29 उपयोग कर बनाया गया है. वस्तुओं अन्य उपलब्ध विरूपण 17,18 तकनीक का एक विशाल सरणी द्वारा (या विकृत) morphed कर सकते हैं.
- Morphed आकृतियों का एक वांछित वितरण बनाने, प्रक्षेप अंक तदनुसार चुनें.
4. आकार रूपांतर बनाने के अतिरिक्त तरीके: प्रमुख घटकों
- आदेश में प्रमुख घटकों का उपयोग करने के लिए आकार विविधताओं उत्पन्न, एक पहले प्रमुख घटकों 15 निर्धारित करने की जरूरत है. प्रमुख घटकों उन्हें 26 का निर्धारण करने के लिए इस्तेमाल किया वस्तुओं के दिए गए सेट के लिए विशिष्ट हैं. अच्छे परिणाम के लिए, 26 कोने के बीच एक से एक पत्राचार के साथ कम से कम 30 वस्तुओं का उपयोग करें.
- एक औसत वस्तु उत्पन्न n इनपुट वस्तुओं का एक वांछित सेट से अलग निर्देशांक और सभी वस्तुओं में प्रत्येक शीर्ष के सामान्य औसत से. इस प्रकार, एक्स एक दिया शिखर कश्मीर के समन्वय एक्स की औसत सभी n वस्तुओं के शिखर कश्मीर के समन्वय, और इतना आगे होना चाहिए.
- Matlab समारोह princomp का प्रयोग करेंn वस्तुओं के प्रमुख घटकों का निर्धारण करते हैं. यह n-1 गैर शून्य eigenvectors इसी n 1 26 eigenvalues के साथ उत्पन्न होगा.
- एक नई वस्तु उत्पन्न एक दिया प्रमुख घटक से एक जम्मू मैं पी, मैं इसी eigenvalue λ मैं और एक वांछित वजन w j P गुणा और औसत वस्तु को जोड़ने:
एक जे = w λ j मैं पी मैं - प्रत्येक अद्वितीय w j एक अद्वितीय वस्तु उत्पन्न होगा. आसानी से w अलग करके, एक एक दिया प्रमुख घटक के साथ चिकनी आकार रूपांतरों पैदा कर सकते हैं.
- एक स्वतंत्र आकार आयाम के साथ आकार रूपांतरों पैदा करने के लिए, 4.4 कदम एक अलग प्रमुख घटक का उपयोग कर दोहराएँ.
- दिया प्रमुख घटक के साथ आकार का एक वांछित वितरण बनाने, w के वांछित वितरण का उपयोग करें. </ Li>
- आकार के एक बहु - आयामी ग्रिड बनाने के लिए, कई प्रमुख घटकों में से प्रत्येक के लिए वजन का एक सेट का उपयोग करें:

5. 3-D वस्तुओं के Haptic संस्करण बनाने
- 'प्रिंट' बाहर 3-D वस्तुओं का उपयोग कर एक 3-D prototyper (या 3 डी 'प्रिंटर'). यदि आवश्यक हो, वस्तु के आकार को समायोजित करने और वस्तु की सतह चिकनी मुद्रण के लिए पहले.
6. एक कापी आवेदन: छवि श्रेणी Bayesian निष्कर्ष
- दृश्य प्रसंस्करण में एक महत्वपूर्ण कार्य श्रेणी में है जो किसी दिए मनाया वस्तु अंतर्गत आता inferring है. हालांकि इस निष्कर्ष की सटीक व्यवस्था अज्ञात है, वहाँ दोनों कम्प्यूटेशनल और शारीरिक 9,12,13,30-32 सबूत है कि यह वस्तु की श्रेणी अनुमान दिया छवि में वस्तु के ज्ञात सुविधाओं के बारे में जानकारी का उपयोग शामिल है. यहाँ, हम illustra होगाते कैसे इस आनुमानिक प्रक्रिया एक Bayesian ढांचे में काम कर सकते हैं, और कैसे डिजिटल भ्रूण इस क्षेत्र में अनुसंधान के लिए उपयोगी हो सकता है.
- सादगी के लिए, हम मान लें कि वर्गीकरण कार्य द्विपदीय है और श्रेणी एल (3 चित्रा) से विशिष्ठ श्रेणी कश्मीर शामिल है. सी श्रेणी चर हो. हम अनुमान करना होगा कि कश्मीर = सी या सी = मनाया छवि चाहे मैं श्रेणी कश्मीर या एल के अंतर्गत आता है के अनुसार एल. वर्गीकरण के लिए एक विशिष्ट दृष्टिकोण शामिल है:
- संभावना है कि वर्ग छवि में जानकारी दी कश्मीर कम्प्यूटिंग, पी निरूपित किया जाता है (सी = कश्मीर | मैं);
- संभावना है कि वर्ग छवि में जानकारी दी एल कम्प्यूटिंग, पी. (सी एल = | मैं) निरूपित किया जाता है, और
- उच्च संभावना के साथ वर्ग उठा.
- अगला, हम सादगी के लिए मान जाएगाकि वहाँ वास्तव में एक द्विआधारी एफ है. यह सुविधा या तो छवि में मौजूद (एफ = एक चिह्नित) या छवि (एफ = 0 चिह्नित) से अनुपस्थित हो सकता है. इस उदाहरण 'जानकारीपूर्ण टुकड़ा' सुविधा का उपयोग चित्रा 8 में दिखाया जाएगा. जानकारीपूर्ण टुकड़े 1 Ullman और उनके सहयोगियों ने 33 के द्वारा वर्णित किया गया है. वर्तमान मामले में, हम छवि टेम्पलेट सुविधा के रूप में 8 चित्र में दिखाया गया है, और 0.69 की एक सीमा मूल्य का प्रयोग करेंगे. निर्धारित करें कि क्या इस सुविधा का एक दिए छवि (कहना, चित्रा 3 में पंक्ति G3 में rightmost छवि) में मौजूद है, हम निम्न चरणों का उपयोग करेंगे:
- छवि में सभी संभव स्थानों पर इस टेम्पलेट स्लाइड और प्रत्येक स्थान पर गणना, सामान्यीकृत टेम्पलेट और अंतर्निहित उप छवि के बीच पार से संबंध के निरपेक्ष मूल्य.
- उच्चतम मूल्य (0.60 वर्तमान मामले में) के साथ छवि स्थान का चयन करें.
- यदि यह मान सीमा से ऊपर है निष्कर्ष निकालना,कि सुविधा मौजूद है, अन्यथा निष्कर्ष निकालना, कि यह अनुपस्थित है. हमारे मामले में, के बाद से उच्चतम 0.60 सहसंबंध 0.69 की दहलीज से नीचे है, हम निष्कर्ष है कि इस सुविधा का इस छवि में अनुपस्थित है.
- ऐसी सुविधाओं का उपयोग करने के तर्क और सुविधाओं चयन और निर्धारित उनके थ्रेसहोल्ड इस रिपोर्ट के दायरे से बाहर हैं, लेकिन के तंत्र refs में विस्तार से वर्णित हैं. 33, 30.
- सुविधा आधारित अनुमान के ढांचे के भीतर, हम मानते हैं कि सभी जानकारी की छवि से पर्यवेक्षक के अर्क इस सुविधा के मूल्य में निहित है, मैं. ई, कि पी (सी | मैं) = पी (C | F).
इसलिए, दिया (उपस्थित या अनुपस्थित) छवि, कंप्यूटिंग (सी कश्मीर = | F) पी एफ के मूल्य का निर्धारण करने के काम हो जाता है कि और पी (सी एल = | F) के साथ कि मूल्य F के लिए, और श्रेणी का चयन उच्च probability. - Bayesian ढांचे में,

इसलिए,
और

ध्यान दें कि दो समीकरण में हर एक समान है. (| एफ सी कश्मीर =) और पी इसलिए, पी की तुलना करने के लिए (सी एल = | एफ), यह विभाजक की गणना करने के लिए आवश्यक नहीं है, बल्कि, यह मात्रा की गणना करने के लिए पर्याप्त हैपी (सी कश्मीर = | F) α पी (सी कश्मीर =) पी (एफ | C कश्मीर =)
और
(पी सी एल = | F) α (पी सी एल =) पी (एफ | C = एल)
गुese कभी कभी 'unnormalized संभावनाओं' कहा जाता है. अवधि पी (सी) के 'पहले' कहा जाता है, और अवधि पी (एफ | C) 'संभावना' कहा जाता है.- सादगी के लिए, हम यह मान एक पूर्व 'फ्लैट': पी (सी = कश्मीर) = पी (सी एल =) = 0.5.
- काम अब पी की गणना (F | सी), एक दिया एक दिया वर्ग सी की एक छवि में सुविधा मूल्य की संभावना है.
- हम एक उदाहरण के रूप में वर्ग एल के छह छवियों (चित्रा 3) का उपयोग करने के लिए पी की गणना (F = 1 | एल = सी), संभावना है कि सुविधा श्रेणी एल के एक छवि में मौजूद है.
- पी की गणना (एफ = 1 | सी = एल), 1 सभी प्रशिक्षण छवियों कि एल हैं ले. फिर, इन 3 चित्र में दिखाया जाता है.
- प्रत्येक छवि के लिए निर्धारित करते हैं, चाहे फ़ीचर मान 1 (वर्तमान) या 0 (अनुपस्थित), के रूप में (6.3.1) में वर्णित है - (6.3.3). हमारे मामले में, चित्रा 3 में छह छवियों के लिए, मान रहे हैं: [0, 0, 1, 0, 1 0].
- छवियों के अंश जो में सुविधा मान 1 है कंप्यूट. हमारे मामले में, यह / 6 2 = 0.33 है.
- इसलिए, पी (एफ = 1 | सी = एल) = .33. सटीक अनुमान को प्राप्त करने के लिए ध्यान दें कि, एक वर्ग के अनुसार कम से कम 30 छवियों का उपयोग करना चाहिए.
- एक समान तरीके में, हम गणना कर सकते हैं कि पी (F = 0 | सी एल =) = 0.67, पी (एफ = 1 | C K =) = 0.83, पी (एफ = 0 | सी कश्मीर =) = .17.
- इन मूल्यों को देखते हुए अनुमान किया जा सकता है. मान लें कि हम एक नई छवि (9 चित्रा) दिया जाता है, और काम के लिए अपनी श्रेणी लेबल निर्धारित है. इस प्रकार के रूप में किया जाता है:
- हम यह निर्धारित करती है कि सुविधा का एफ छवि में मौजूद है, के रूप में वर्णित (6.3.1) - (6.3.3). हमारे मामले में, feaसंरचना मौजूद है, तो एफ = 1.
- समीकरणों (1) और (2), और मूल्यों में गणना (6.7.5) - (6.7.6), हम गणना कर सकते हैं कि पी (सी कश्मीर = | एफ = 1) = 0.42 और (पी सी एल = | एफ 1 =) = .17.
- इस जानकारी को देखते हुए, यह तर्कसंगत निष्कर्ष है कि छवि वर्ग कश्मीर से अपेक्षाकृत कम आत्मविश्वास के साथ है.
- यह दिलचस्प और एक जैविक प्रणाली (कहते हैं, psychophysically) में इस तरह के एक दृष्टिकोण का परीक्षण करने के लिए उपयोगी हो सकता है. इस मामले में, व्यवहार भविष्यवाणियों और किया जा सकता है (6.8.2) प्राप्त उन लोगों के रूप में इस तरह के परिणाम के खिलाफ कम्प्यूटेशनल तुलना. सटीक भविष्यवाणी करने के लिए, पी के अच्छे अनुमानों (F | सी) के लिए आवश्यक हैं. इस तरह के अनुमान है, तथापि, परिचित वस्तुओं के लिए प्राप्त करने के लिए मुश्किल हो सकता है. कारण यह है कि पी के एक विषय का अनुमान (एफ | सी) सीधे नहीं नमूदार है, और यह बहुत मुश्किल है यह विषय से गणनाS 'प्राकृतिक छवियों से पहले जोखिम बेकाबू और अज्ञात है. इसके विपरीत, यदि डिजिटल भ्रूण प्रयोगों के लिए इस्तेमाल कर रहे हैं, तो यह संभव है करने के लिए ठीक से नियंत्रित भ्रूण और भ्रूण श्रेणियों जो इस विषय से अवगत कराया है. यह वास्तव में एक ही विषय के लिए खुल गया डेटा से हित की मात्रा की गणना करने के लिए आसान बनाता है. तथ्य यह है कि भ्रूण की उपस्थिति प्राकृतिक है उपयोगी है, क्योंकि यह संभावना है कि प्राकृतिक श्रेणियों के साथ विषय के रूप में एक ही वर्गीकरण रणनीति का उपयोग कर रहा है.




Representative Results
VM उपन्यास 3-D आकृतियाँ का एक लगभग असीमित आपूर्ति उत्पन्न करने के लिए इस्तेमाल किया जा सकता है. कुछ कापी डिजिटल VM एल्गोरिथ्म का उपयोग कर उत्पन्न भ्रूण चित्रा 1 के नीचे पैनल में दिखाया जाता है, इन 16 भ्रूण की प्रत्येक Cygwin के लिए डिजिटल भ्रूण उपकरण में 40 विकास के लिए'' growEmbryos.exe 'कार्यक्रम (1 टेबल देखें) का उपयोग करके उत्पन्न किया गया. चक्र. अन्य सभी विकास मानकों आंतरिक कार्यक्रम द्वारा निर्धारित किया गया है. इन मानकों में से अधिकांश लगातार थे (यानी, एक भ्रूण से अगले करने के लिए समान). Morphogen स्रोतों के स्थान शक्ति के रूप में कुछ मानकों, यादृच्छिक प्रत्येक रन के लिए स्वतंत्र रूप से कार्यक्रम द्वारा निर्धारित मानकों के आंतरिक थे. इन 16 भ्रूण के बीच आकार विविधताओं इन यादृच्छिक मानकों में बदलाव का एक परिणाम के रूप में पूरी तरह से पड़ी.
सतह 34,35 texturing के कुछ उदाहरणों में कुछ मनमाने ढंग से चुना textures का उपयोग चित्रा 2A में दिखाया जाता है. एक दृश्य दृश्योंrbitrary जटिलता व्यावसायिक रूप से उपलब्ध 3-D मॉडलिंग और प्रतिपादन पर्यावरण, के रूप में चित्रा 2B में दिखाया का उपयोग कर बनाया जा सकता है.
एक प्रतिनिधि 'परिवार के पेड़' डिजिटल भ्रूण का उपयोग उपाध्यक्ष द्वारा उत्पन्न चित्रा 3 में दिखाया गया है. तुलनीय पेड़ भी डिजिटल भ्रूण के अलावा अन्य वस्तुओं का उपयोग करते हुए निर्माण किया जा सकता है, के रूप में 4 चित्र में दिखाया गया है. ध्यान दें कि किसी भी मामले में, वस्तुओं है कि एक आम पूर्वज straightforwardly एक वर्ग का गठन, हालांकि experimenter भी वस्तुओं के किसी भी दूसरे सेट के रूप में एक वर्ग को परिभाषित करने के लिए चुन सकते हैं. यह चित्रा 4 से ध्यान देने योग्य बात है कि हमारे VM और उपाध्यक्ष एल्गोरिदम वर्तमान कार्यान्वयन अपेक्षाकृत चिकनी, घुमावदार सतहों, के रूप में दांतेदार या फ्लैट वस्तुओं के लिए विरोध का निर्माण करने के लिए जाता है लायक है. यह भी टिप्पण लायक है कि यह शायद इन एल्गोरिदम के हमारे कार्यान्वयन की सीमा है और खुद को नहीं एल्गोरिदम, biolological प्रक्रियाओं के बाद objec का उत्पादन कर सकते हैंफ्लैट सतहों और दांतेदार रूपरेखा (जैसे, गुलाब का पत्ता) के साथ टीएस.
आंकड़े 5 और 6 के दो तरीके हैं कि करने के लिए इसके अलावा में इस्तेमाल किया जा सकता है, या वस्तु आकार और वस्तु श्रेणियों में सैद्धांतिक बदलाव बनाने के लिए करने के बजाय, उपाध्यक्ष के ठेठ परिणाम दर्शाते हैं.
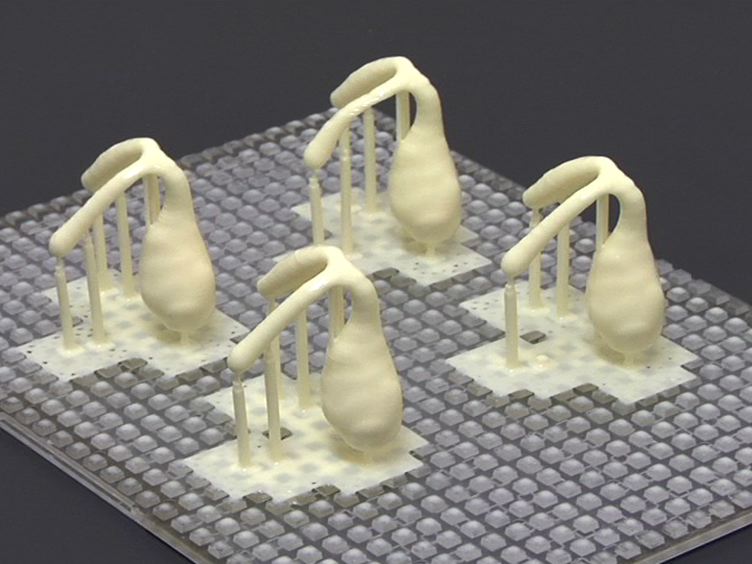
7 चित्रा के शीर्ष पैनल दो डिजिटल भ्रूण के दृश्य renderings दिखाता है, और 7 चित्रा के नीचे पैनल इसी एक व्यावसायिक रूप से उपलब्ध prototyper 3-D द्वारा उत्पन्न प्रिंटआउट दिखाता है.
आंकड़े 8 और 9 छवि टुकड़े का उपयोग करने के लिए एक दिया दृश्य वस्तु को वर्गीकृत करने के लिए धारा 6 में वर्णित प्रक्रियाओं वर्णन.

चित्रा 1. आभासी morphogenesis. 14 वस्तुओं के एक प्रकार को दिखाता है. Morphogen की मध्यस्थता कोशिका विभाजन, सेल के विकास, सेल आंदोलन और क्रमादेशित सेल 7,8,36,37 मौत: डिजिटल भ्रूण एक या जैविक embryogenesis के प्रमुख प्रक्रियाओं में से कुछ की अधिक अनुकरण द्वारा उत्पन्न किया जा सकता है. प्रत्येक रन एक विंशतिफलक (शीर्ष पैनल में दिखाया गया है) के साथ शुरू होता है, और एक अद्वितीय भ्रूण को उत्पन्न करता है, कि भ्रूण के VM पैरामीटर सेटिंग (या 'जीनोटाइप') पर निर्भर करता है. इस प्रकार, वह नीचे के पैनल में 16 भ्रूण अलग अलग आकार के है, क्योंकि वे सब अलग जीनोटाइप है. ध्यान दें कि सरल या अधिक जटिल आकार के रूप में की जरूरत उत्पन्न किया जा सकता है (उदाहरण के लिए, बेहतर दृश्य पदानुक्रम के किसी भी स्तर पर न्यूरॉन्स को प्रोत्साहित करने के लिए) भ्रूण के जीनोटाइप जोड़ तोड़ द्वारा. क्रमादेशित कोशिका मृत्यु को छोड़कर यह aforementioned भ्रूणजनक प्रक्रियाओं के सभी पैदा भ्रूण दिखाया में नकली थे. नकली क्रमादेशित कोशिका मृत्यु विशेष रूप से हैलक्षित indentations बनाने (नहीं दिखाया गया है) के लिए उपयोगी है.

चित्रा 2. दृश्य डिजिटल भ्रूण का उपयोग उत्तेजनाओं बनाना किसी वर्चुअल 3-D वस्तु की तरह, डिजिटल भ्रूण रेखांकन जा करने के लिए मनमाने ढंग से जटिलता के दृश्य पर्दे के किसी भी मानक 3-D ग्राफिकल टूलकिट का उपयोग बनाने छेड़छाड़ कर सकते हैं. यह आंकड़ा कुछ आम जोड़तोड़ दिखाता है (ए) एक ही डिजिटल भ्रूण बनावट कई अलग अलग textures का उपयोग कर, और ऊपर छोड़ दिया पर एक अदृश्य प्रकाश स्रोत से जलाया (बी) एक गोपनीय दृश्य आकार और डिजिटल भ्रूण फिर से orienting और के द्वारा बनाई गई है.. डिजिटल यह उसी पृष्ठभूमि इसके साथ textured था के खिलाफ रखकर. डिजिटल भ्रूण निचले सही चक्र में 'सादे दृष्टि' में पाया जा सकता है. दृश्य stimuli cre के अतिरिक्त उदाहरण के लिएडिजिटल भ्रूण का उपयोग ated, refs देखते हैं. 9,10,12-14,38.

चित्रा 3. डिजिटल भ्रूण वी.पी. का उपयोग कर श्रेणियों बनाना वी.पी. एल्गोरिथ्म जैविक विकास है, में है कि दोनों मामलों में, उपन्यास वस्तुओं और वस्तु श्रेणियों में पैतृक रूप में उभरने विविधताओं चुनिंदा जमा emulates. प्रत्येक पीढ़ी जी मैं, चयनित भ्रूण पैदा करना, पीढ़ी जी मैं एक अग्रणी. संतान अपने माता पिता के आकार विशेषताओं वारिस है, लेकिन अपने स्वयं के आकार विविधताओं (के रूप में उनके जीनोटाइप में छोटे बदलाव द्वारा निर्धारित) अर्जित रूप में वे विकास. यह आंकड़ा एक आम पूर्वज के रूप में, एक विंशतिफलक से शुरू वंश की तीन पीढ़ियों के परिवार के पेड़ 'से पता चलता है. ध्यान दें कि इस मामले में, आकृति जटिलता बढ़ जाती है विंशतिफलक से generatआयन 1 जी, लेकिन 1 से आगे जी नहीं. यह इसलिए है क्योंकि सेल की संख्या में वृद्धि (यानी, कोशिका विभाजन) विंशतिफलक से पीढ़ी 1 जी के लिए अनुमति दी गई थी, लेकिन नहीं जी 1 से आगे. सामान्य में, कोशिका विभाजन सेल और आकार की समग्र जटिलता बदलने के बिना सेल के विकास परिवर्तन आकार के आंदोलन के रूप में अन्य morphogenetic प्रक्रियाओं जबकि आकार जटिलता बढ़ जाता है.

चित्रा 4. वी.पी. आभासी डिजिटल भ्रूण के अलावा अन्य वस्तुओं यह आंकड़ा का उपयोग में मदद करता है सामान्य सिद्धांत का वर्णन है कि आभासी डिजिटल भ्रूण के अलावा अन्य वस्तुओं के VP को इनपुट के रूप में इस्तेमाल किया जा सकता है. अपने मौजूदा रूप में VP एल्गोरिथ्म किसी वर्चुअल 3 डी वस्तु की सतह जिसका केवल त्रिकोण के होते हैं पर काम कर सकते हैं. जनरेशन जी 1 comprisका एड (बाएं से दाएं) एक लौकी, हीरा, चेहरे नकाब, सेब, रॉक, और कैक्टस. ध्यान दें कि इस आंकड़े में पीढ़ी 1 जी में वस्तुओं को एक आम पूर्वज नहीं है, क्योंकि यह वी.पी. की आवश्यकता नहीं है. 2 जी और 3 जी में वस्तुओं 1 जी में चट्टान के वंशज का प्रतिनिधित्व करते हैं. कोई कोशिका विभाजन किसी भी पीढ़ी में अनुमति दी गई है, इसलिए है कि सभी आकार बदलाव केवल आंदोलन और / या विकास के लिए दिए गए ऑब्जेक्ट के व्यक्तिगत 'सेल' से पैदा हुई.

चित्रा 5. आकार में चिकनी रूपांतरों पैदा morphing का प्रयोग Morphing दिए गए दो वस्तुओं (दूर छोड़ दिया है और अब तक यह आंकड़ा में भ्रूण सही) और नामित दो की इसी कोने के बीच interpolating द्वारा मध्यवर्ती वस्तुओं (भ्रूण हस्तक्षेप व बचाव करने) की गणना शामिलघ वस्तुओं. मामले में दिखाया, सभी कोने एक ही अदिश कारक का उपयोग interpolated रहे थे, एक morphing रैखिक में जिसके परिणामस्वरूप. हालांकि, यह भी संभव है करने के लिए वस्तुओं गैर रैखिक morph () नहीं दिखाया. Morphing computationally सीधा है जब दो वस्तुओं के कोने के बीच एक सटीक एक से एक पत्राचार है, मामले में के रूप में दिखाया जाता है. हालांकि यह संभव है, सिद्धांत रूप में, किसी भी दिए गए दो आभासी की परवाह किए बिना कि क्या उनके कोने बिल्कुल अनुरूप वस्तुओं के बीच morph, हालांकि वहाँ 17,18 ऐसा करने के लिए कोई अद्वितीय सैद्धांतिक विधि है.

6 चित्रा. प्रमुख घटकों का उपयोग करने के लिए आकार में चिकनी रूपांतरों पैदा. (ए) औसत भ्रूण. यह भ्रूण 400 भ्रूण का अंकगणितीय औसत (श्रेणियों से कश्मीर और एल में 200 प्रत्येक का प्रतिनिधित्व करता हैचित्रा 3). प्रमुख घटक के रूप में 4.3 चरण में वर्णित गणना की गई. ध्यान दें कि प्रमुख घटकों पारस्परिक रूप से स्वतंत्र, 400 भ्रूण की अमूर्त आकार आयाम का प्रतिनिधित्व करते हैं (नहीं दिखाया) 25,26. 400 भ्रूण 399 गैर शून्य प्रिंसिपल 25,26 घटक है, जो एक साथ सभी विचरण, आकार या जानकारी, भ्रूण में उपलब्ध सामूहिक के लिए खाते उपज. परंपरा के मुताबिक, प्रमुख घटक उनके eigenvalues के घटते क्रम, या समग्र विचरण वे 25,26 समझाने की अनुपात में व्यवस्था कर रहे हैं. इस मामले में, पहले दो प्रमुख घटक क्रमश: 73% और 19% आकार 400 भ्रूण में उपलब्ध जानकारी के लिए जिम्मेदार है. (बी) भ्रूण कि प्रधान 1 घटक के विभिन्न भार (या अधिक सटीक, भारित eigenvalues) का प्रतिनिधित्व करते हैं. 2 (एकदम बाएं) से -0.2 के बराबर चरणों में (दाएं) -2 के लिए विभिन्न वजन (सी) भ्रूण कि प्रधान Compon के विभिन्न भार का प्रतिनिधित्व करते हैं2 ent. वजन भी दो (एकदम बाएं) से -0.2 के बराबर चरणों में (दाएं) -2 विविध. ध्यान दें कि प्रमुख घटकों से छेड़छाड़ विशेष रूप से किसी भी भ्रूण के शरीर के विशिष्ट भाग में हेरफेर नहीं करता है (उदाहरण के लिए, मामले में भ्रूण के पंख दिखाया गया है). हालांकि, यदि आवश्यक हो तो, आभासी शरीर के अंगों 3 डी वस्तुओं किसी भी मनमाने ढंग से उपयोगकर्ता परिभाषित व्यावसायिक रूप से उपलब्ध 3 डी मॉडलिंग वातावरण की सबसे अधिक (नहीं दिखाया गया है) का उपयोग फैशन में चालाकी से किया जा सकता है.

चित्रा 7. Haptic वस्तुओं का निर्माण 3-D आभासी वस्तुओं haptic एक मानक का उपयोग की वस्तुओं के रूप में किया जा सकता है 'मुद्रित', व्यावसायिक रूप से उपलब्ध 3-D 'प्रिंटर' या prototyper. यह आंकड़ा डिजिटल दृश्य वस्तुओं (शीर्ष पंक्ति) के रूप में या इसी haptic वस्तुओं (नीचे पंक्ति) के रूप में प्रदान की गई भ्रूण से पता चलता है. haptic है वस्तुओंइस आंकड़े में hown के बारे में 6 सेमी (पैमाने बार = 1 सेमी) चौड़ा किया जा मुद्रित किया गया है, हालांकि वस्तुओं बहुत छोटे या बड़े आकार में मुद्रित किया जा सकता है.

चित्रा 8. एक उदाहरण जानकारीपूर्ण टुकड़ा के लिए एक टेम्पलेट. इस उदाहरण में, टेम्पलेट .69 की एक सीमा के साथ जुड़े है.

9 चित्रा. एक नई छवि वस्तु वर्ग है जिसके लिए जाना जाता है और नहीं है के लिए निर्धारित किया जाना चाहिए.
Discussion
VM और उपाध्यक्ष के संज्ञानात्मक विज्ञान अनुसंधान में उपयोगिता
हम पहले L9 ,10,12 14 विस्तार में VM और उपाध्यक्ष की उपयोगिता में वर्णित है. संक्षेप में, वीएम, विशेष रूप से डिजिटल भ्रूण पद्धति, उपयोगी है क्योंकि यह उपन्यास बनाने के लिए एक सैद्धांतिक और लचीला तरीका है, लेकिन प्राकृतिक 3-D 14 वस्तुओं प्रदान करता है. इसी तरह, उपाध्यक्ष बनाने प्राकृतिक 9,10,12,13 श्रेणियों के एक सैद्धांतिक विधि प्रदान करता है. यह है कि वस्तु वी.पी. प्रकृति में तथ्य यह है कि श्रेणियों के लिए प्रकृति में श्रेणीबद्ध हो जाते हैं, और भीतर और श्रेणियों में सुविधा विविधताओं वर्गीकृत करने के लिए experimenter और एल्गोरिदम की स्वतंत्र रूप से उठता सहित वस्तु श्रेणियों, साथ शेयर कई सुविधाओं के द्वारा उत्पन्न श्रेणियों टिप्पण लायक है उन्हें 39.
वर्तमान सीमाओं और भविष्य के निर्देश
भविष्य के काम के लिए तीन हमारे प्रोटोकॉल और दिशाओं की वर्तमान सीमाओं वे सुझावविशेष रूप से उल्लेखनीय हैं: पहला, VM और उपाध्यक्ष दोनों जैविक प्रक्रियाओं अनुकरण. जबकि हम बताते हैं कि गैर जैविक आभासी वस्तुओं इन प्रक्रियाओं के लिए substrates के रूप में इस्तेमाल किया जा सकता है, अंतर्निहित प्रक्रिया अभी भी कर रहे हैं biologically प्रेरित. हालांकि, प्राकृतिक वस्तुओं - जैविक और गैर जैविक समान आकार गैर जैविक बलों के कारण परिवर्तन से गुजरना. उदाहरण के लिए, चट्टानों कटाव या अवसादन के रूप में भूवैज्ञानिक प्रक्रियाओं की वजह से आकार में बदल सकते हैं. रॉक की नई श्रेणियों के अन्य ऐसे भूवैज्ञानिक प्रक्रियाओं से उत्पन्न हो सकती है. यह अपेक्षाकृत उपलब्ध आकार परिवर्तन एल्गोरिदम के प्रदर्शनों की सूची में इन प्रक्रियाओं को शामिल करने के लिए स्पष्ट किया जाना चाहिए.
हमारे प्रोटोकॉल का दूसरा प्रमुख सीमा है कि गतिशील आकार में परिवर्तन के मौजूदा प्रदर्शनों की सूची बल्कि सीमित है. यह आकार में परिवर्तन का एक बड़ा जैविक गति, या हवा, पानी या गुरुत्वाकर्षण के रूप में बाहरी ताकतों के कारण गति के रूप में, सरणी को शामिल करने के लिए वांछनीय है. हमें उम्मीद है कि यह wilमैं अपेक्षाकृत सीधा करने के लिए जैसे गतिशील आकार में परिवर्तन को लागू करने के लिए जाना जाता कंप्यूटर ऐनिमेशन एल्गोरिदम को सहन करने के लिए लाने के लिए हो सकता है.
हमारे प्रोटोकॉल के 3 प्रमुख सीमा है कि VM वर्तमान में कई अन्य में जाना जाता है, सबसे विशेष रूप से, 36 gastrulation morphogenetic प्रक्रियाओं को शामिल नहीं करता है. यह भी तथ्य यह है कि पौधों में morphogenesis पूरी तरह से विकास द्वारा मध्यस्थता है कम या कोई सेल संभव आंदोलन के साथ, के रूप में कुछ ज्ञात कमी, सेल 36 दीवारों की वजह से, को शामिल करने में विफल रहता है. इसी तरह, उपाध्यक्ष अन्य आनुवंशिक 40 बहाव के रूप में जाना जाता वंशावली प्रक्रियाओं शामिल नहीं है. इन सीमाओं को संबोधित बहुत मदद कर सकता है विकास, पारिस्थितिकी और विकासवादी सिमुलेशन में हमारे प्रोटोकॉल के उपयोग की सुविधा होगी.
Disclosures
ब्याज की कोई संघर्ष की घोषणा की.
Acknowledgments
इस काम के हिस्से में अमेरिकी सेना अनुसंधान प्रयोगशाला और अमेरिकी सेना के अनुसंधान कार्यालय अनुदान W911NF1110105 और NSF अनुदान IOS-1147097to जे हेगड़े द्वारा समर्थित किया गया. समर्थन भी जॉर्जिया स्वास्थ्य विज्ञान विश्वविद्यालय के विजन डिस्कवरी संस्थान से एक पायलट जे हेगड़े अनुदान द्वारा प्रदान किया गया. डैनियल Kersten N00014-05-1-0124 ONR और NIH R01 EY015261 अनुदान द्वारा समर्थित किया गया और भाग में WCU (वर्ल्ड क्लास यूनिवर्सिटी) कोरिया की नेशनल रिसर्च फाउंडेशन के माध्यम से शिक्षा, विज्ञान और प्रौद्योगिकी मंत्रालय द्वारा वित्त पोषित प्रोग्राम (R31 10,008 ). Karin Hauffen अमेरिकी सेना के अंडर ग्रेजुएट रिसर्च शिक्षुता कार्यक्रम (URAP) द्वारा समर्थित किया गया.
Materials
| Name | Company | Catalog Number | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. | |||
References
- Palmeri, T. J., Gauthier, I.
- Seger, C. A., Miller, E. K.
- Perceptual Learning. Fahle, M., Poggio, T. , MIT Press. (2002).
- Ashby, F. G., Maddox, W. T.
- Gauthier, I., Tarr, M. J. Becoming a "Greeble" expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Fragment-based learning of visual categories. Bart, E., Hegdé, J., Kersten, D. Cosyne 2008 Conference, 2008 Feb 28-Mar 2, Salt Lake City, , Cosyne. Salt Lake City. 121-12 (2008).
- Ball, P. Nature's patterns : a tapestry in three parts. , Oxford University Press. (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D.
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M.
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. Numerical geometry of non-rigid shapes. , Springer. (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. Pattern classification. , 2nd edn, Wiley. (2001).
- Bishop, C. M. Pattern recognition and machine learning. , Springer. (2006).
- Theodoridis, S., Koutroumbas, K. Pattern recognition. , 3rd edn, Academic Press. (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , 4th edn, W.H. Freeman and Co. (2011).
- Tuffery, S. Data mining and statistics for decision making. , Wiley. (2011).
- Crawley, M. J. Statistical Computing: An Introduction to Data Analysis using S-Plus. , Wiley. (2002).
- Venables, W. N., Ripley, B. D. Modern Applied Statistics with S. , Springer. (2003).
- Beier, T., Neely, S.
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. Warping and morphing of graphical objects. , Morgan Kaufmann Publishers. (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , IEEE Computer Society Press. (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. Computer graphics. , Nova Science Publishers. (2011).
- Lengyel, E. Mathematics for 3D game programming and computer graphics, third edition. , 3rd Ed, Cengage Learning. (2011).
- Gilbert, S. F. Developmental biology. , 9th edn, Sinauer Associates. (2010).
- Gilbert, S. F., Epel, D. Ecological developmental biology : integrating epigenetics, medicine, and evolution. , Sinauer Associates. (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E.
- Futuyma, D. J. Evolution. , 2nd edn, Sinauer Associates. (2009).