Summary
Biz kesin tanımlanmış özelliği varyasyonları ile natüralist 3 boyutlu nesneler ve nesne kategoriler oluşturmak için yeni bir yöntem tarif. Biz morfolojilerinden ve ardından görsel veya dokunsal nesneleri olarak kılınabilir roman, natüralist sanal 3 boyutlu nesneler ve nesne kategoriler oluşturmak için phylogenesis biyolojik proseslerin simülasyonları kullanın.
Abstract
Kantitatif nesne algısını incelemek amacıyla, biyolojik sistem tarafından veya makineler, özellikleri 1, tercihen natüralist, kesin tanımlanabilir nesneleri ve nesne kategoriler oluşturmak için bir ihtiyaç tarafından algı olabilir. Ayrıca, algısal öğrenme çalışmaları için, bu tür özellikleri 2 ile yeni nesneleri ve nesne kategoriler (veya nesne sınıfları) oluşturmak için yararlıdır.
Birçok yenilikçi ve kullanışlı yöntemler halen yeni nesneleri ve nesne kategoriler 3-6 (ayrıca refs bakın. 7,8) oluşturmak için yapılmamış. Ancak, genellikle mevcut yöntemleri eksiklikleri üç geniş tip var, konuşma.
İlk olarak, şekil varyasyonları genellikle deneyci 5,9,10 dayattığı ve bu nedenle doğal kategorilerde değişkenliği farklı olabilir ve belirli bir tanıma algoritması için optimize edilmiş. Bu varyasyonların tamponlar bağımsız olarak ortaya konulması arzu edilen bir olacaktırrnally kısıtlamalar empoze.
İkinci olarak, mevcut yöntemler zorluk doğal nesneler 11-13 şekil karmaşıklığı yakalama sahiptir. Hedefi doğal nesne algısını incelemek için ise, muhtemel karıştırıcı ve özel durumlarda önlemek amacıyla, nesneleri ve natüralist olması nesne kategorileri için arzu edilir.
Üçüncü olarak da, niceliksel olarak geleneksel yöntemler ile oluşturulan, uyarıcı bilgiler ölçmek için genellikle zordur. Bu bilgiler tam olarak ölçülmesi nerede nesneleri ve nesne kategoriler oluşturmak için arzu edilir ve gerekli durumlarda, sistematik (veya 'ayar') manipüle. Istiyorsunuz Bu, bir nicel olarak alttaki nesneyi tanıma işlemleri formüle etmek için olanak sağlar.
Burada yukarıdaki kriterlerden üç karşılamak algoritmaları veya yöntemler, bir dizi tanımlamak. Sanal morfolojilerinden (VM) tarafından 'dijital embriyolar' adlı romanı, natüralist sanal 3 boyutlu nesneler oluştururembriyogenez 14 biyolojik süreci simüle. Sanal phylogenesis (VP) doğal seleksiyon 9,12,13 evrimsel süreci simüle ederek roman, natüralist nesne kategoriler oluşturur. Bu simülasyonlar tarafından oluşturulan nesneleri ve nesne kategoriler daha şekil özelliklerinin 15,16 sistematik varyasyonlar oluşturmak için çeşitli morphing yöntemlerle manipüle edilebilir. VP ve yöntemler geçişin aynı zamanda dijital embriyolar dışında roman sanal nesneler, ya da gerçek dünya nesneleri 9,13 sanal sürümleri için, prensip olarak uygulanabilir. Bu şekilde oluşturulan sanal nesneler yüzey dokusu, aydınlatma, boyut, bakış açısı ve arka plan arzu manipülasyonlar ile, geleneksel bir grafik arayüzü kullanarak görsel olarak kılınabilir. Sanal nesneler aynı zamanda geleneksel bir 3-D prototipleme kullanılarak haptik nesneler olarak 'basılıyor' olabilir.
Biz de illu yardımcı olmak için bu hesaplama algoritmaları bazı uygulamaları tarifalgoritmaları potansiyel yarar Bitrate. Bu onların uygulamalarından algoritmaları ayırt etmek önemlidir. Uygulamaları temel bir algoritma 'ilkesi kanıtı' olarak sadece sunulan gösteriler vardır. Bu, genel olarak, bir hesaplama algoritmasının uygulanması çoğu zaman algoritması yok sınırlamaları vardır, dikkat etmek önemlidir.
Hep birlikte, bu yöntemler hem biyolojik ve hesaplama sistemleri ile nesne tanıma ve algısal öğrenme çalışmak için güçlü ve esnek bir araç kümesi temsil eder. Uygun uzantıları ile, bu yöntemler de morfolojilerinden phylogenesis çalışmalarında yararlı olabilir.
Protocol
1. VM kullanarak Doğacı Sanal 3 boyutlu nesneleri oluşturma
- Dijital embriyo oluşturmak için, Dijital Embriyo Atölye kullanın (DEW; bkz. Tablo 1). Her bir işlem, tek bir embriyo 14, belli çalışma (Şekil 1) için kullanılan ayarlar (veya genotip ') bir kümesi için eşsiz olan bir şekil oluşturur. Embriyonun 'hücreler' üçgenler 14 olarak temsil edilir.
- Embriyo istenilen sayı üretmek için gerekli gibi birçok kez programını çalıştırın.
- Daha karmaşık şekiller istenen ise, embriyo hücreleri böleceğiz sayısını yani büyüme döngülerinin sayısını artırmak. Bu aynı zamanda program yavaşlatmak dikkat ediniz. Dijital embriyolar dışında sanal nesneleri oluşturmak gerekirse, piyasada mevcut 3-D modelleme araçları kullanmak veya ticari satıcıları (Tablo 1) sanal nesneler edinin.
- Bu sanal nesneyi kaydetmek için genellikle tavsiye edilirnesneleri kolaylıkla ticari bir 3-D modelleme araç içine alınabilir böylece bu tür OBJ gibi yaygın olarak kullanılan bir dosya biçimi, s. Bu amaçla, çiy varsayılan OBJ biçiminde nesnelerin yazar.
- Görsel uyaranlara bir 3-D modelleme ve render ortamında (Tablo 1) kullanarak bir veya daha fazla dijital embriyoları kullanılarak oluşturulabilir. Bu tür yönlendirme, boyutu, aydınlatma, yüzey dokusu ve (bkz. Şekil 2) istenilen uyaranlara oluşturmak için arka değişen standart olarak grafik işlemleri kullanın.
2. VP kullanarak Doğal Nesne Kategorileri Oluşturma
- Nesne kategorileri oluşturmak için, yukarıdaki Adım 1.1 süreçlerin istenilen kombinasyonu (Şekil 3) 9,10,12,13 kullanarak verilen atası (veya 'üst') nesne soyundan (ya da 'çocuk') oluşturur.
- Bazı yöntemler gibi morphing veya temel bileşenler (Adım 3 ve 4'ün altına bakınız) gibi pürüzsüz şekil varyasyonları, iş bett oluşturmak için aşağıda açıklananer tüm giriş nesnelerin hücrelerin aynı sayıda nesneleri köşeler arasında bire bir karşılık var demektir. ise Bu tür nesneler yaratmak için, hücre sayısı değişmeyecek ve (bkz., örneğin, Şekil 3 G 3 nesiller G 2) nesneler arasında köşeler bire bir yazışma koruyacak yalnızca VM süreçler kullanmak. Örneğin, hücre bölünmesi ve programlı hücre ölümü hücre sayısını değiştirebilir ve nesnelerin belirli bir çifti köşeler arasında bire-bir yazışma belirlemek için (17,18 imkansız olmasa da) çok zor bunu yapmak.
Belirli bir nesne içinde hücrelerin sayısı değiştirme işlemleri, aynı zamanda, şekil karmaşıklığı değiştirmek dikkat ediniz. Genel olarak, hücre sayısı arttıkça, nesnenin büyük şekil karmaşıklığı ve onun yüzeyi düzgündür. - Dijital embriyolar dışında gerekli, sanal nesneler VP girişleri (Şekil 4) olarak kullanılabilir durumunda.
- Bazı yöntemler gibi morphing veya temel bileşenler (Adım 3 ve 4'ün altına bakınız) gibi pürüzsüz şekil varyasyonları, iş bett oluşturmak için aşağıda açıklananer tüm giriş nesnelerin hücrelerin aynı sayıda nesneleri köşeler arasında bire bir karşılık var demektir. ise Bu tür nesneler yaratmak için, hücre sayısı değişmeyecek ve (bkz., örneğin, Şekil 3 G 3 nesiller G 2) nesneler arasında köşeler bire bir yazışma koruyacak yalnızca VM süreçler kullanmak. Örneğin, hücre bölünmesi ve programlı hücre ölümü hücre sayısını değiştirebilir ve nesnelerin belirli bir çifti köşeler arasında bire-bir yazışma belirlemek için (17,18 imkansız olmasa da) çok zor bunu yapmak.
- Donanımı 19, belirli bir dağılımı elde etmek için olduğu gibi, belirli bir kategori içinde nesneler ayrıca çok seçilebilir. Örneğin, bir seçici olarak nesne boyutlu bir bimodal bir dağılım oluşturmak için yeterli bir kategori ikinci orta büyüklükteki nesneleri ortadan kaldırabilir.
- Tüm kategoriler için kullanılabilir şekil bilgisini ölçmek için evrensel uygun olduğunu tek bir yöntem yoktur, ne kategorilendirme tüm nesneleri 20-22 için uygun olan tek bir yöntem yoktur. Böylece, experimentor yandan 20-22 adresinde kategorileri ve hesaplamalı hedeflere dayalı bu yöntemleri seçmelisiniz. Adım 4 mevcut şekil bilgi çeşitli yönlerini manipüle edilmesi için yaygın olarak kullanılan bir yöntem açıklar.
- Kategorileri, belirli bir çifti arasında benzerlik objektif olarak mevcut filogenetik yöntemler 23,24 kullanılarak ölçülebilir. Örneğin, bir kategori belirli çifti arasındaki dikey (veya 'evrimsel') mesafesi, hiyerarşik olarak cl tarafından ölçülür, R istatistiksel araç yöntemleri ustering kategori benzerliği 25,26 objektif bir ölçüdür.
3. Şekil Varyasyon Oluşturma Ek Yöntem: Dijital Morphing
- Bir nesnenin her köşe diğer nesne (. Yani, köşeler arasında bire-bir yazışma ile nesneleri) tam olarak bir köşe karşılık böylece nesnelerin herhangi bir çift göz önüne alındığında, morphing basittir 17,18,27-29: Bu da durumda, iki obje arasında düz varyasyonları (veya 'morphs') düzgün bir şekilde karşılık gelen tepe ve normal (Şekil 5) arasında enterpolasyon ile elde edilir. Seçilen nesnelerin çift bağlı olarak, geçişin bir kategori içinde yeni kategoriler veya ek çocuk neden olur.
- Şekil 5'te gösterildiği gibi nesneler doğrusal geçişin 27-29 kullanılarak oluşturulmuştur. Nesneler mevcut diğer deformasyon yöntemleri 17,18 geniş bir dizi ile (ya da buruşturulmuş) morphed olabilir.
- Morphed şekiller istenen bir dağıtım oluşturmak için, buna göre interpolasyon noktaları seçin.
4. Şekil Varyasyon Oluşturma Ek Yöntemleri: Temel Bileşenler
- Şekil varyasyonları oluşturmak için ana bileşenler kullanmak için, bir birinci ana bileşenleri 15 belirlemek gerekmektedir. Temel bileşenler onları 26 belirlemek için kullanılan nesneler kümesi için özeldir. Iyi sonuçlar için, köşeler 26 arasında bire-bir yazışma ile en az 30 nesneler kullanın.
- Ortalama bir nesne oluşturun n giriş nesneleri istenen bir dizi ayrı ayrı tüm nesneler her köşe koordinatlarını ve normal ortalayarak. Böylece, x, belirli bir tepe k koordine x, ortalama benzeri her n nesnelerin tepe k koordinatları, ve olmalıdır.
- Matlab fonksiyonuyla princomp kullanınn nesnelerin temel bileşenleri belirlemek için. Bu, karşılık gelen n-1 öz 26 ile birlikte, n-1 sıfır olmayan özvektörler oluşturur.
- Yeni bir nesne oluşturmak için belirli bir temel bileşen A j P i, ilgili özdeğer λ i ve istenilen ağırlık w j i p çarpma ve ortalama nesne eklemek:
A j = + w j λ i P i - Her benzersiz w j benzersiz bir nesne oluşturur. Sorunsuz w değiştirerek, bir belirli bir temel bileşen boyunca pürüzsüz şekil varyasyonları oluşturabilirsiniz.
- Bağımsız bir şekil boyut boyunca şekil varyasyonları oluşturmak için, farklı bir ana bileşen kullanılarak 4.4 adımı tekrarlayın.
- Belirli bir temel bileşen boyunca şekil istenen bir dağılım oluşturmak için, w istenen dağılım kullanınız. </ Li>
- Şekillerin çok boyutlu bir ızgara oluşturmak için, birkaç temel bileşenler her biri için ağırlıklar kümesini kullanın:

5. 3-D Objects Haptik Sürümleri oluşturma
- Bir 3-B prototipleme (veya 3-D 'yazıcı') kullanarak "Print-out '3-boyutlu nesneler. Eğer gerekirse, nesnenin boyutu ayarlamak ve baskı öncesinde nesnenin yüzeyi pürüzsüz.
6. Bir Exemplar Uygulama: Resim Kategorisi Bayesian Çıkarım
- Görsel işleme önemli bir görevi verilen gözlenen nesnenin ait olduğu kategori inferring edilir. Bu çıkarsama mekanizması tam olarak bilinmemekle birlikte, nesne kategorisi anlaması için verilen görüntüde nesnenin bilinen özellikleri hakkında bilgi kullanımını içerdiğini hesaplamalı ve fizyolojik kanıtlar 9,12,13,30-32 hem yoktur. Burada, misal olacakte bu nasıl çıkarımsal süreç Bayesian çerçevesinde çalışabilir ve nasıl dijital embriyolar bu alanda araştırma için yararlı olabilir.
- Basitlik için, biz kategorizasyon görev ikili ve kategori L (Şekil 3) ayırt kategori K içerdiğini varsayar. C kategorisi değişken olsun. Biz anlaması edeceğini C = K veya C kategori I K veya L ait gözlenen görüntünün olmadığına göre = L. Kategorizasyon için tipik bir yaklaşım gerektirir:
- Kategorisinde görüntüde bilgi verilmiş K olduğunu olasılık hesaplama, p belirtilir (C = K | I);
- Kategorisinde görüntüde bilgi verilmiş L olduğu olasılığı Bilgisayar, p belirtilir (C = L | I) ve
- Olasılığının yüksek kategori Toplama.
- Sonra, basitlik için üstlenecekTam bir ikili özelliği F olduğunu. Bu özellik, ya görüntünün mevcut (F = 1 gösterilir) veya görüntü (F = 0 gösterilir) devamsızlık olabilir. Bu örnek, Şekil 8'de gösterildiği 'bilgilendirici parçası' özelliğini kullanacak. Bilgilendirici parçaları ilk Ullman ve arkadaşları 33 tarafından tarif edilmiştir. Bu durumda, bu özellik olarak Şekil 8'de gösterildiği gibi görüntü şablonu ve 0.69 arasında bir eşik değerini kullanır. Bu özellik, belirli bir görüntü (Şekil 3 satır G3 sağdaki görüntü söylüyorlar) mevcut olup olmadığını belirlemek için, aşağıdaki adımları kullanır:
- Görüntüdeki tüm olası konumları üzerinden bu şablonu kaydırın ve her yerde, şablon ve temel alt görüntü arasında normalize çapraz korelasyon mutlak değerini hesaplar.
- En yüksek değer (davada 0.60) ile görüntü konumu seçin.
- Bu değer, eşiğin üstünde ise, sonuçlandırmakbu özellik mevcutsa, aksi takdirde eksik olduğu sonucuna varıldı. Yüksek korelasyon 0.60 altında 0.69 eşik olduğundan bizim durumda, biz özelliği bu görüntüde eksik olduğu sonucuna varıldı.
- Bu özelliklerin kullanımı gerekçesi, ve özelliklerini seçerek ve onların eşik bu raporun kapsamı dışındadır, fakat belirleme mekanizmaları Refs de ayrıntılı olarak tarif edilmiştir. 33, 30.
- Özellik tabanlı çıkarsama çerçevesinde, biz i, görüntüden gözlemci özler tüm bilgileri bu özelliğin değeri bulunan varsayalım. e, ki p (C | I). = p (C | F).
Bu nedenle, görev haline verilen görüntü (mevcut veya yok), bilgisayar p (C = K | F) F değerini belirleyen bu ve p (C = L | F) bu değeri F ve kategori seçerek Daha yüksek olasılığı,lity. - Bayesian çerçevesinde,

Bu yüzden,
ve

Iki denklemde payda aynı olduğuna dikkat ediniz. (| F C = K) ve p Bu nedenle, s karşılaştırmak için (C = L | F) payda hesaplamak için gerekli değildir, aksine, bu miktarları hesaplamak için yeterlidirp (C = K | F) α p (C = K) p (F | C = K)
ve
p (C = L | F) α p (C = L) p (F | C = l)
These bazen 'normalleştirilmemiş olasılıklar' denir. 'Olasılığını' denir | (C F) terimi p (C) 'önceden' olarak adlandırılan ve çarpım terimi edilir.- Basitlik için, biz kabul edecek bir önceki 'düz': p (C = K) = p (C = L) = 0.5.
- (| C F), belirli bir kategori C bir görüntü belirli bir özellik değeri olasılığını görevi p hesaplamak artık.
- (| C = L F = 1), özellik kategorisi L bir görüntü mevcut olduğunu olasılığı Biz p hesaplamak için bir örnek olarak kategori L altı görüntüleri (Şekil 3) kullanacaktır.
- P hesaplamak için (F = 1 | C = L), ilk L ait bütün eğitim görüntü alabilir. Yine, bu Şekil 3 'de gösterilmiştir.
- Her görüntü için özellik değeri 1 (mevcut olup olmadığını belirlemekOlarak (6.3.1) 'de anlatılan) veya 0 (olmayan), - (6.3.3.) Bizim durumumuzda, Şekil 3'te altı görüntüler için değerler şunlardır: [0, 0, 1, 0, 1, 0].
- Özellik değeri 1 olduğu görüntü fraksiyonu hesapla. Bizim durumda, 2/6 = 0.33 olduğunu.
- Bu nedenle, P (F = 1 | C = l) = 0.33. Doğru tahminler elde etmek için olduğunu unutmayın, bir sınıf başına en az 30 resim kullanmanız gerekir.
- Benzer bir tarzda, bu hesaplayabilir ki p (F = 0 | C = l) = 0.67, p (F = 1 | C = K) = 0.83, p (F = 0 | C = K) = 0.17.
- Bu değerler göz önüne alındığında, çıkarsama gerçekleştirilebilir. Biz yeni bir görüntü (Şekil 9) verilen ve görevi kategori etiketini belirlemektir varsayın. Bu, aşağıdaki gibi yapılır:
- (6.3.3) - Biz (6.3.1) 'deki gibi özelliği, F, görüntü içinde mevcut olup olmadığını belirler. Bizim durumumuzda, fea yılındaTure mevcut ise, yani F = 1.
- Denklem (1) ve (2), ve hesaplanan değerlerin (6.7.5) - (6.7.6), biz hesaplamak olabilir p (C = K | F = 1) ve p = 0.42 (C = L | F = 1) = 0.17.
- Bu bilgiler göz önüne alındığında, bu görüntüyü nispeten düşük güven ile, kategori K olduğu sonucuna rasyoneldir.
- Bu bir biyolojik sistem (söylemek, psychophysically) böyle bir yaklaşım sınamak için ilginç ve yararlı olabilir. Bu durumda, davranışsal tahminler yapılmış ve bu gibi (6.8.2) elde edilmiş olanlar olduğu gibi, bilişimsel sonuçlarına karşı kıyaslanabilir. Doğru tahminler yapmak için, p iyi tahminler (F | C) gereklidir. Bu tahminler, ancak, bilinen nesneler için elde etmek zor olabilir. Bunun nedeni p bir konu satışta (F | C) doğrudan gözlemlenebilir ve bu konu çünkü hesaplamak için son derece zor değildirDoğal görüntüler için 's pozlama öncesi kontrol edilemeyen ve bilinmemektedir. Dijital embriyolar deneyler için kullanılır Buna zıt olarak, daha sonra tam konusu maddeye maruz kalan ve embriyolar embriyo kategorileri kontrol etmek mümkündür. Bu sayede tabi maruz bırakıldı tam olarak aynı veri ilgi miktarları hesaplamak mümkün kılar. Bu konu doğal kategorileri ile aynı kategorizasyon strateji kullanıyor muhtemel kılmaktadır beri embriyo 'görünümü doğal olduğu gerçeği, yararlı olur.




Representative Results
VM yeni 3-D şekilleri neredeyse sınırsız kaynağı oluşturmak için de kullanılabilir. VM algoritması kullanılarak üretilir Bazı örnek dijital embriyo Şekil 1 'in alt panelinde gösterilir. Bu 16 embriyo her biri 40 büyümesi için (bkz Tablo 1) Cygwin için dijital embriyo araçları' growEmbryos.exe 'programı kullanılarak oluşturulan çevrimleri. Diğer tüm büyüme parametreleri program tarafından dahili olarak belirlenmiştir. Bu parametrelerin çoğu (bir embriyo diğerine özdeş, yani) sabit olmuştur. Böyle morfojen kaynaklarının yeri ve gücü gibi bir kaç parametre, her çalışma için ayrı ayrı program tarafından dahili olarak ayarlanmış rastgele parametrelerdir. Bu 16 embriyoları şekil varyasyonları bu rastgele parametrelerde değişimler sonucunda sadece ortaya çıktı.
Bir isteğe bağlı olarak seçilen dokular kullanılarak yüzey dokusu 34,35 bazı örnekleri Şekil 2A'da gösterilmiştir. Bir görsel sahnelerirbitrary karmaşıklık, Şekil 2B'de gösterildiği gibi, piyasada bulunan 3-D modelleme ve işleme ortamı kullanılarak oluşturulabilir.
Dijital embriyoları kullanılarak VP tarafından oluşturulan bir temsilci soyağacına 'Şekil 3' de gösterilmiştir. Şekil 4'te gösterildiği gibi karşılaştırılabilir ağaçlar da, dijital embriyolar başka nesnelerin kullanılarak inşa edilebilir. Deneyci da nesnelerin herhangi bir başka grubu gibi bir kategori tanımlamak için tercih rağmen her iki durumda da, bir ortak ata nesneler doğrudan doğruya, bir kategorisi oluşturmaktadır dikkat edin. Bu VM ve VP algoritmalarının mevcut uygulanması gibi pürüzlü veya düz nesnelere karşı nispeten yumuşak, kavisli yüzeyler üretmek eğilimindedir Şekil 4'ten fazlalaştı. Bu muhtemelen bu algoritmaların bizim uygulama sınırlaması değil algoritmalar kendileri olduğunu da fazlalaştı, biolological süreçler yana objec üretebilirdüz yüzeyleri ve pürüzlü hatları (örneğin., gül yaprağı) ile ts.
Şekiller 5 ve 6, şekil nesne ve nesneyi kategorilerde ilkesel varyasyonların oluşturulması için iki ek olarak kullanılabilecek yöntemler, ya da yerine, VP tipik sonuçlarını göstermektedir.
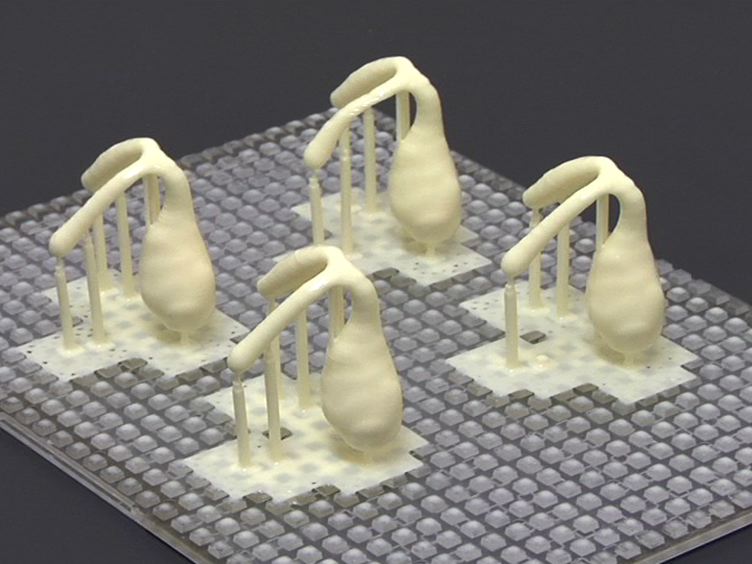
Şekil 7 ve üst panelde iki dijital görsel embriyoların kaplamalar göstermektedir, ve Şekil 7, bir alt panel ticari olarak satılan bir 3-D prototipleme tarafından oluşturulan karşılık gelen çıktıları göstermektedir.
Şekil 8 ve 9, belirli bir görsel obje kategorize etmek için görüntü parçaları kullanarak Bölüm 6'da tarif edilen prosedürler göstermektedir.

Şekil 1. Sanal morfogenez. 14 adlı romanı, natüralist, sanal 3 boyutlu nesneler bir tür göstermektedir. Morfojen-aracılı hücre bölünmesinin, hücre büyümesinin, hücre hareketi ve programlanmış hücre ölümü 7,8,36,37: Dijital biyolojik embriyolar embriyo kilit Bazı işlemleri, bir veya daha fazla taklit ederek oluşturulabilir. Her çalışma bir icosahedron (üst panelde gösterilen) ile başlar ve bu embriyonun VM parametre ayarları (veya 'genotip') bağlı olarak, benzersiz bir embriyo oluşturur. Hepsi farklı genotip çünkü Böylece, alt panelinde 16 embriyolar, farklı şekiller var. Gerektiği gibi basit veya daha karmaşık şekiller embriyonun genotip manipüle ederek (örneğin, optimum görsel hiyerarşi belirli bir düzeyde nöronların uyarmak için) oluşturulur unutmayın. Programlanmış hücre ölümü dışında yukarıda belirtilen embryogenetic işlemlerin tümü embriyolar gösterildiği üreten simüle edilmiştir. Simüle programlı hücre ölümü özellikle böyledir(gösterilmemiş olan) hedeflenen girintiler oluşturmak için yararlıdır.

Şekil 2. Dijital embriyoları kullanılarak görsel uyaranlara oluşturma. Herhangi bir sanal 3 boyutlu nesne gibi, dijital embriyolar grafiksel herhangi bir standart 3-D grafik arayüzü kullanılarak karmaşıklıkta sahneler görsel oluşturmak için manipüle edilebilir. Bu rakam bazı ortak manipülasyonları göstermektedir. (A) aynı dijital embriyo birçok farklı dokular kullanılarak dokulu olup, sol üst köşede, görünmez bir ışık kaynağından yaktı. (B) A kamufle sahne boyutlandırma ve dijital embriyo yeniden yönlendirilmesi ve oluşturulur dijital onunla dokulu oldu aynı arka plana karşı yerleştirerek. Dijital embriyo sağ alt kadranda 'ova görünümünde' bulunabilir. Görsel uyaranların CRE ek örnekler içinDijital embriyoları kullanılarak ated, refs bakın. 9,10,12-14,38.

Şekil 3,. VP kullanılarak dijital embriyo kategoriler oluşturmak. VP algoritması iki durumda, yeni nesneler ve nesne kategoriler gibi varyasyonlar seçici birikir Kalıtımsal emerge bu biyolojik evrim, öykünür. Her nesil G i anda, seçilen embriyolar nesil G i +1 yol doğurmayı. Döl ebeveynlerinin şekli özelliklerini devralır, ancak onlar geliştikçe kendi şekil varyasyonları (onların genotipinde küçük varyasyonlar tarafından belirlenir) tahakkuk eder. Bu rakam tek bir ortak atadan, bir icosahedron başlayarak soyundan üç kuşak bir 'aile ağacı' gösterir. , Ki bu durumda, şekil karmaşıklık icosahedron dan generat notiyon G 1, ama G 1 itibaren. Hücre sayısının artması (yani., Hücre bölünmesi) icosahedron nesile G 1 izin verildi, çünkü bu, ama değil G 1 itibaren. Genel olarak, hücre bölünmesi gibi şekil genel anlamda değiştirmeden hücre hareketi ve hücre büyümesi ile şekil değiştirme gibi diğer morfogenetik işlemler, oysa şekil karmaşıklığı daha da artmaktadır.

Şekil 4. VP Dijital embriyolar dışında sanal nesneleri kullanarak. Bu rakam dijital embriyolar dışında sanal nesneler VP girdi olarak kullanılabilecek genel ilke göstermek yardımcı olur. Mevcut haliyle VP algoritma, yüzeyi üçgen yalnızca oluşur herhangi bir sanal 3 boyutlu nesne üzerinde çalışabilir. Nesil G 1 comprised (soldan sağa), bir kabak, elmas, yüz maskesi, elma, rock ve kaktüs. VP bunu gerektirmez, çünkü, bu rakam nesil G 1 nesnelerin ortak bir atası var unutmayın. G 2 ve G 3 Nesneler G 1 kaya soyundan temsil eder. Resim hücre bölünmesi tüm şekil varyasyonları sadece hareketi ve / veya belirli bir nesnenin, bireyin hücrelerinin büyümesi ortaya çıkmıştır ki, her kuşak izin verildi.

Şekil 5,. Şeklinde pürüzsüz varyasyon oluşturmak için geçişin kullanma. Morphing içerir verilen iki nesne (bu rakam kadar sol ve embriyo sağında) alarak ve iki adayı karşılık gelen köşeler arasında interpolasyon ile ara nesneleri (embriyo müdahale) hesaplanmasıd nesneler. Gösterilen durumda, tüm noktalar geçişin bir doğrusal ile sonuçlanan, aynı sayısal faktör kullanılarak enterpole edilmiştir. Bununla birlikte, (gösterilmemiş olan) non-lineer nesnelerin morph etmek de mümkündür. İki nesne köşeler arasında bir tam bire bir karşılık olduğunda gösterilen durumda olduğu gibi Morphing, hesaplama basittir. Öylesine 17,18 yapmak için hiçbir benzersiz ilkeli yöntem olmasına rağmen Ancak, ne olursa olsun kendi vertices tam olarak karşılık olsun herhangi iki sanal nesneler arasında morph, ilke olarak, mümkündür.

Şekil 6. Şeklinde pürüzsüz varyasyonlarını oluşturmak için ana bileşenler kullanma. (A) Ortalama embriyo. Bu embriyo 400 embriyoların aritmetik ortalaması (K ve L kategorilerden 200 Her temsilŞekil 3). Adım 4.3 'de açıklandığı gibi temel bileşenler hesaplandı. Temel bileşenler (gösterilmemiştir) 25,26 400 embriyoların karşılıklı bağımsız, soyut şekil boyutlarını temsil unutmayın. 400 embriyolar birlikte tüm varyans veya embriyolar topluca mevcut şekil bilgisi, hesap 399 sıfır olmayan temel bileşenler 25,26, verim. Geleneksel olarak, ana bileşenler kendi öz ise sırasıyla, ya da 25,26 açıklamak genel varyans orantılı olarak düzenlenir. Bu durumda, ilk iki temel bileşenler sırasıyla% 73 ve 400 embriyo mevcut şekli bilgilerin% 19 olarak gerçekleşmiştir. (B) Temel Bileşen 1 farklı ağırlıklar (ya da daha doğrusu, ağırlıklı özdeğerler) temsil Embriyolar. Anapara compon farklı ağırlıkları temsil -0.2 eşit basamakta -2 (en sağda) ile +2 (en solda) arasında değişmekteydi ağırlıkları. (C) Embriyolarent 2. Ağırlıkları da +2 (en solda) den -0.2 eşit basamakta -2 (en sağda) arasında değişmekteydi. Temel bileşenler manipüle münhasıran (örn., Durumda embriyo kanatları gösterilen) embriyonun herhangi bir belirli vücut parçası manipüle unutmayın. Ancak, gerektiğinde, sanal vücut parçaları 3-boyutlu nesneler (gösterilmemiştir) ticari olarak temin edilebilen 3-D modelleme ortamlardan en kullanarak rasgele herhangi bir kullanıcı tanımlı bir şekilde manipüle edilebilir.

Şekil 7. Haptik nesneleri oluşturma. Sanal 3 boyutlu nesneler 3-D 'Yazıcı' ya prototipleme, bir standart kullanarak haptik nesneler olarak piyasada bulunan 'basılıyor' olabilir. Bu rakam, görsel nesneleri (üst sıra) veya ilgili haptik nesneleri (alt satır) olarak işlenir dijital embriyoları gösterir. Haptik nesneler snesneleri çok daha küçük ya da daha büyük boyutlarda basılmış olmasına rağmen bu rakam hown, yaklaşık 6 cm genişliğinde (ölçek çubuğu = 1 cm) olarak basılmıştır.

Şekil 8. Örnek bilgi parçası için bir şablon. Bu örnekte, şablon ile ilişkili 0.69 bir eşik sahiptir.

Şekil 9,. Nesne kategori bilinen ve edilmediği için yeni bir görüntü tespit edilmesi gerekmektedir.
Discussion
Bilişsel Bilimler Araştırma VM ve VP kullanışlılığı
Biz daha önce ayrıntılı l9 ,10,12-14 VM ve VP yararlılığını nitelendirdiler. Bir roman yaratmak için ilkeli ve esnek bir yöntem, ancak natüralist 3 boyutlu nesneler 14 sağladığından Kısaca, VM, özellikle dijital embriyo metodolojisi, yararlıdır. Benzer şekilde, doğal VP kategoriler 9,10,12,13 oluşturma ilkesel bir yöntem sağlar. Bu kategoride doğada hiyerarşik olma eğilimindedir, ve içinde ve kategoriler arasında özellik varyasyonları sınıflandırmak için bağımsız deneyci ve algoritmaların ortaya gerçeği dahil doğada nesne kategorileri ile VP ortak özellikler tarafından üretilen bu nesne kategorileri fazlalaştı Onları 39.
Mevcut Sınırlamalar ve Açılımlar
Gelecekte yapılacak çalışmalar için bizim protokol ve yol tarifi Üç akım sınırlamaları onlar önermeközellikle dikkat çekicidir: Birincisi, VM ve VP hem biyolojik süreçleri simüle. Biz biyolojik olmayan sanal nesneler bu işlemler için substrat olarak kullanılabilir olduğunu gösterirken, temel süreçleri hala biyolojik motive vardır. Ancak, doğal nesneler - hem biyolojik ve biyolojik olmayan - biyolojik olmayan kuvvetler nedeniyle şekil değişikliklere uğrarlar. Örneğin, kayalar nedeniyle erozyon veya sedimantasyon gibi jeolojik süreçlere şekli değişebilir. Kaya Yeni kategoriler gibi diğer jeolojik süreçlerin ortaya çıkabilir. Bu mevcut şekil değişikliği algoritmaları repertuarına bu süreçlere dahil etmek oldukça basit olmalıdır.
Bizim protokolünün ikinci önemli kısıtlılığı dinamik şekil değişiklikleri nedeniyle mevcut repertuarını oldukça sınırlı olmasıdır. Bu tür biyolojik hareket, ya da bu tür rüzgar, su veya ağırlık olarak dış kuvvetlerin hareket olarak şekil değişikliği daha büyük bir dizi dahil etmek tercih edilir. Biz wil bekliyoruzl gibi dinamik şekil değişiklikleri uygulamak için bilinen bilgisayar animasyonu algoritmaları ayı getirmek için nispeten kolay olması.
Bizim protokol üçüncü büyük sınırlama olduğunu VM anda gastrulasyon 36, en önemlisi, dahil olmak üzere birçok diğer bilinen morfogenetik süreçler içermez olduğunu. Ayrıca nedeniyle hücre duvarlarının 36 örneğin bitkilerdeki morfolojilerinden olası az veya hiç hücre hareketi ile, büyüme tamamen aracılık ettiğini gerçek olarak bilinen bazı kısıtlamalar, birleştirmek için başarısız olur. Benzer şekilde, bu tür genetik sürüklenme VP 40 gibi diğer bilinen işlemler filogenetik içermez. Bu sınırlamalar Adresleme gelişimsel, ekolojik ve evrimsel simülasyonlar bizim protokolünün kullanımını kolaylaştırmak büyük ölçüde yardımcı olacaktır.
Disclosures
Çıkar çatışması ilan etti.
Acknowledgments
Bu çalışma ABD Ordusu Araştırma Laboratuarı ve Amerikan Ordusu Araştırma Bürosu hibe W911NF1110105 ve NSF hibe IOS-1147097to Jay hedge tarafından kısmen desteklenmiştir. Destek de Gürcistan Sağlık Bilimleri Üniversitesi Vizyonu Discovery Institute Jay hedge için bir pilot hibe sağlanmıştır. Daniel Kersten hibe ONR N00014-05-1-0124 ve NIH R01 EY015261 tarafından ve kısmen Kore Ulusal Araştırma Vakfı aracılığıyla Eğitim, Bilim ve Teknoloji Bakanlığı tarafından finanse WCU (World Class Üniversitesi) programı (R31-10008 tarafından desteklenmiştir ). Karin Hauffen ABD Ordusu Lisans Araştırma Çıraklık Programı (URAP) tarafından desteklenmiştir.
Materials
| Name | Company | Catalog Number | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. | |||
References
- Palmeri, T. J., Gauthier, I.
- Seger, C. A., Miller, E. K.
- Perceptual Learning. Fahle, M., Poggio, T. , MIT Press. (2002).
- Ashby, F. G., Maddox, W. T.
- Gauthier, I., Tarr, M. J. Becoming a "Greeble" expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Fragment-based learning of visual categories. Bart, E., Hegdé, J., Kersten, D. Cosyne 2008 Conference, 2008 Feb 28-Mar 2, Salt Lake City, , Cosyne. Salt Lake City. 121-12 (2008).
- Ball, P. Nature's patterns : a tapestry in three parts. , Oxford University Press. (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D.
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M.
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. Numerical geometry of non-rigid shapes. , Springer. (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. Pattern classification. , 2nd edn, Wiley. (2001).
- Bishop, C. M. Pattern recognition and machine learning. , Springer. (2006).
- Theodoridis, S., Koutroumbas, K. Pattern recognition. , 3rd edn, Academic Press. (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , 4th edn, W.H. Freeman and Co. (2011).
- Tuffery, S. Data mining and statistics for decision making. , Wiley. (2011).
- Crawley, M. J. Statistical Computing: An Introduction to Data Analysis using S-Plus. , Wiley. (2002).
- Venables, W. N., Ripley, B. D. Modern Applied Statistics with S. , Springer. (2003).
- Beier, T., Neely, S.
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. Warping and morphing of graphical objects. , Morgan Kaufmann Publishers. (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , IEEE Computer Society Press. (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. Computer graphics. , Nova Science Publishers. (2011).
- Lengyel, E. Mathematics for 3D game programming and computer graphics, third edition. , 3rd Ed, Cengage Learning. (2011).
- Gilbert, S. F. Developmental biology. , 9th edn, Sinauer Associates. (2010).
- Gilbert, S. F., Epel, D. Ecological developmental biology : integrating epigenetics, medicine, and evolution. , Sinauer Associates. (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E.
- Futuyma, D. J. Evolution. , 2nd edn, Sinauer Associates. (2009).