

Summary
私たちは、MEMSデバイスの検査および特徴付けのためにコンパクトな反射デジタルホログラフィックシステム(CDHM)を提示します。自然の幾何学的な倍率を提供発散入力波を用いたレンズレス設計が実証されています。静的および動的の両方の研究が提示されています。
Introduction
マイクロおよびナノ物体の計測技術は、業界や研究者の両方にとって非常に重要です。実際、オブジェクトの小型化が光学測定のための新たな挑戦を表します。微小電気機械システム(MEMS)は、一般的に定義されている電気機械システムを小型化し、通常、マイクロセンサ、マイクロアクチュエータ、マイクロエレクトロニクスおよび微細構造などのコンポーネントを備えています。このようなバイオテクノロジー、医療、通信などの多様な分野で多くのアプリケーションを発見し、1を検出しました。最近、ますます複雑だけでなく、試験対象物の漸進的な小型化がMEMSに適した特性評価技術の開発のための呼び出しを提供しています。これらの複雑なマイクロシステムの高スループット製造プロセス条件2による特性パラメータと関連する欠陥を定量化するために、高度なインライン測定技術の実装を必要とします。幾何学的パラメーターの例えば、偏差MEMSデバイスにおけるメータは、システムの特性に影響を与える、特徴付けされなければなりません。加えて、産業界は、完全な三次元(3D)計測、ビュー、高撮像分解能の大型のfi ELD、リアルタイム分析のような高解像度の測定性能を必要とします。これにより、品質管理や検査工程信頼性を確保するために不可欠です。また、既存のインフラストラクチャにインストールするために生産ライン上で容易に実現可能と、比較的コンパクトに測定システムを必要とします。
最初のガボール3によって導入されたホログラフィは、参照および感光媒体への物体波との干渉を記録することによって、オブジェクトの完全な定量的情報の回復を可能にする技術です。記録として知られるこのプロセスの間に、電界の振幅、位相及び偏光を媒体に格納されています。次に物体波フィールドは、私の上に基準ビームを送信することによって回収することができますdium、ホログラムの光学読み取りとして知られているプロセス。従来の検出器が唯一の波の強度を記録するので、それは電界に関する追加情報へのアクセスを提供しますので、ホログラフィは、過去50年間に大きな関心の対象となっています。しかし、従来のホログラフィーのいくつかの側面は、業界のアプリケーションに非実用的にします。実際には、感光材料が高価であり、記録処理は、一般的に高い安定性を必要とします。このような電荷結合素子(CCD)のような高解像度のカメラセンサーの進歩は、デジタル計測のための新しいアプローチを開いています。これらの技術の一つは、デジタルホログラフィ4として知られています。デジタルホログラフィ(DH)において、ホログラムは、カメラ(記録媒体)に記録され、数値処理は、位相および強度情報を再構築するために使用されます。 Fiのに示すように、記録再生:従来のホログラフィと同様に、結果は2つの主要な手順の後に得ることができます記録は、従来のホログラフィに類似している場合グレ1。しかし、再構成は5のみの数値です。数値的再構成プロセスは、 図2に示されている。2つの手順は、再構築プロセスに関与しています。まず、物体波フィールドは、ホログラムから取得されます。ホログラムは、ホログラム面でのオブジェクトの波面を取得するには、数値基準波と乗算されます。第二に、複雑なオブジェクトの波面は、数値的に画像平面に伝播されます。我々のシステムでは、このステップは、コンボリューション法6を用いて行われます。得られた再構成されたフィールドは、複雑な関数であり、従って、位相および強度は、関心対象の定量的高さの情報を提供する抽出することができます。ホログラフィ方式で全体のfi ELD情報記憶能力および高速データ処理のためのコンピュータ技術の使用は、実験的な構成の柔軟性を提供し、大幅にSPEEを高めます実験的プロセスの開発、MEMSおよびマイクロシステム7,8のための動的計量ツールとしてDHを開発するために新たな可能性を開きます。
位相コントラストイメージングにおけるデジタルホログラフィの使用は、現在十分に確立され、最初の十年以上前に9提示されました。実際、デジタルホログラフィと顕微鏡を組み合わせて、微小デバイスの調査は、多くの研究10、11、12、13で行われた。高コヒーレンス14と、低コヒーレンス15ソースならびに幾何13、16の異なるタイプに基づいて、いくつかのシステムで、17 (ラインで、軸、共通のパスから...)提示されています。また、ラインのデジタルホログラフィは、MEMSデバイス18、19の特性に以前に使用されてきた。しかし、これらのシステムは、一般に実現するのが困難とかさばる工業的用途に適しません。本研究では、オフAXIに基づく自由な、コンパクトでシンプルなレンズシステムを提案しますリアルタイムMEMS検査および特性評価のためのデジタルホログラフィが可能です。コンパクトデジタルホログラフィック顕微鏡(CDHM)は、マイクロサイズの鏡面物体の3次元形態を得るために開発し、特許を取得したレンズ少ないデジタルホログラフィックシステムです。我々のシステムでは、638 nmで動作する10mWで、非常に安定し、温度制御されたダイオードレーザは、単一モード光ファイバに結合されます。 図3に示すように 、ファイバから発する発散ビームは、ビームスプリッタによって基準と物体光に分割されます。参照光路ジオメトリ軸オフを実現するために傾斜ミラーを含みます。物体光は散乱し、サンプルによって反射されます。 2つのビームは、ホログラムを与えるCCDに干渉する。画像上に刷り込ま干渉パターンが空間キャリアと呼ばれ、1つの画像のみで定量的位相情報の回復を可能にされています。数値再構成は、一般的なフーリエ変換や駅などの畳み込みアルゴリズム使用して実行されます以前テッド。レンズレスの構成は、それが魅力的ないくつかの利点を有します。いかなるレンズが使用されないように、入力ビームは、天然の幾何学的倍率を提供し、従って、システムの解像度を向上させる発散波です。また、一般的な光学系で遭遇する諸収差の自由です。 図3Bに見られるように、システムは、(400nm G)、(55x75x125ミリ3)軽量コンパクトにすることができ、容易に工業生産ラインに組み込むことができます。
Subscription Required. Please recommend JoVE to your librarian.
Protocol
測定の1.前準備
注記:この実験に用いたサンプルは、MEMS電極です。金電極は、リフトオフプロセスを用いてシリコンウェーハ上に製造されます。サンプルを1mm期間18 mmの周期構造(電極)で×18ミリウエハーであります
- システムを使用する前に、ログブックにサインインします。
- コンピュータ、LASERと並進ステージ電源をオンにします。
- MEMS電極/マイクロダイアフラムサンプルを置きます。
- ピンセットを用いて、試料ホルダーの中央にMEMSのサンプルを配置します。
- ビーム経路に電極を配置するために、試料ホルダーを調整します。ビューの最大測定フィールドは、カメラセンサのサイズによって定義されます。これは、2.3ミリメートルX 1.8ミリメートルの長方形です。
- 垂直方向電動ステージを用いて、近似的1.5センチメートルサンプルからシステムを移動します。
2.ソフトウェアの設定の調整
- 3DViewを開きます。ソフトウェア。 3DViewは、C ++で開発され、社内のプログラムです。
- 実験のために適切なカメラを選択するために、イメージングソースボタンをクリックします。モノクロCCDカメラを選択してください。単色ダイオードレーザーを用いているので、このセットアップではカラーカメラを避けてください。カラーカメラを使用する場合に加えて、同じ画素数では、解像度が低くなります。
- デバイスの設定]タブで、[¥800(1280×960)ビデオフォーマットおよび第2のビデオレートあたり15フレーム。
- カメラを起動するには、黄色の再生ボタンをクリックします。インプリントされた干渉縞(ホログラム)を持つオブジェクトの画像が表示されます。
- 必要に応じて画像の飽和を回避するために、最適なゲインと露出パラメータを調整します。
- ライブビデオウィンドウのカメラビューを使用して、サンプルに調査するために正確な領域を選択するための試料位置を調整します。
- オープン設定]タブ。
- 設定]タブでは、(反射または透過)面の種類を選択し、ラの波長カメラのSER、およびピクセルサイズ。レーザーは、633nmで動作するダイオードレーザです。カメラの画素サイズは、4,650 nmです。サンプルモードが選択されるべきであるので、反射鏡面MEMS電極装置です。
注:CDHM構成は、反射面を測定することができます。しかし、ソフトウェアは、異なるデジタルホログラフィシステムは13を使用する場合に透明なサンプルを測定するために使用することができます。この設定の変更は、相からの高さ計算式を変更します。それは物体の屈折率を含むように、実際に、光路差の計算は、透明なサンプルについてわずかに異なります。 - コンボリューション再構成アルゴリズムを選択して、ゼロに復興の距離を設定します。 1または2の再構築ステップを選択してください。
注:再構成距離パラメータは、ホログラムから得られた強度画像を考慮すると、オートフォーカスを使用することによって、後で定義することができます。再構成ステップは、の数を定義しますフレネル積分を実施し、ビーム伝搬をシミュレートするために使用される手順。最初の方法は、単一のフーリエ変換として一度不可欠な評価します。 2の工程を2回積分を評価します。これは、グリッド間隔でより多くの柔軟性を追加しますが、計算上20あまり効率的です。 - 後処理]タブでは、最終的に開封された画像を取得するために必要なアンラッピングアルゴリズムを選択します。選択品質はアルゴリズムをマッピングされました。
注:ソフトウェアでは、ゴールドスタインと品質の間の選択は、アルゴリズムを行うことができるマップされました。それ以降は、堅牢かつ迅速な空間位相アンラップを示しています。品質マッピングされたアルゴリズムは、21で説明したようにアンラップ導かれた位相に基づいています。
- 設定]タブでは、(反射または透過)面の種類を選択し、ラの波長カメラのSER、およびピクセルサイズ。レーザーは、633nmで動作するダイオードレーザです。カメラの画素サイズは、4,650 nmです。サンプルモードが選択されるべきであるので、反射鏡面MEMS電極装置です。
3.データ集録
- フーリエ変換フーリエスペクトルウィンドウを開くには、アイコンを変換押します。 One 0次と2 +1、-1受注が表示されます。そうでない場合、サンプルは正しい位置にあることを確認し、ゲイン調整再びD露光時間。
- ライブ測定モードを停止します。フィルタツールを使用して、回折次数(正または負の周波数)のいずれかを選択します。位相回復のために必要なすべての周波数が存在するように選択した領域が十分大きくなければなりません。再びライブモードに切り替えます。
注:負の順序の選択はちょうど最終結果の位相の符号に影響を与える、 すなわち、最終的な3D画像が反転します。 - 位相ウィンドウを開きます。開封されたモードが有効になっていないことを確認してください。ラップされた縞刻印オブジェクトのグレーの位相画像が表示されます。
- 位相画像における縞の数を減らすために、電動垂直ステージを利用します。唯一の1または2縞が画像上に残っている場合には、電動ステージを停止します。
注意:システムが干渉に基づいています。したがって、振動に敏感です。ラップされた位相画像がagai表示される前に、z方向電動ステージを移動した後、ユーザーは、1または2秒を待つ必要がありますn個。安定した位相画像を得るために、測定時の振動を回避することも重要です。 - 最高の復興距離を見つけるために、オートフォーカス22ボタンをクリックします。一つは、強度画像がシャープでクリアな表示されるまで、最適な復興距離に近づくようにオートフォーカスを数回使用する必要があります。オートフォーカス22で説明したように、効率的かつ時間効果的な角度スペクトル法に基づくものです。
注:フォーカススライドバーは、微調整のために使用することができます。次に、現在の復興距離を記録するために中央のフォーカスボタンをクリックします。最良の焦点は、オートフォーカスオプションで発見されていないことを時々表示されます。この場合、手動で入力復興距離が最良の焦点を見つけるために。 - アンラップ]ボタンをクリックして、アンラップされた位相画像を見るために開封されたモードを有効にします。
静的測定4.データの可視化と分析
- 最終的な3Dを見るために3D画像ウィンドウを開きます。サンプルの画像。 (...、カラーマップ、スケール表示を回転させる)、最終的な結果を観察するために利用可能なオプションを使用します。
- 重複しないように窓を配置し、すべての測定ウィンドウを表示するには、タイルウィンドウ]ボタンをクリックしてください。
- アンラップされた位相画像上の関心領域に線を描画するラインルーラーを使用してください。折れ線グラフウィンドウで、関心領域の断面形状のプロットを観察することができます。オブジェクトのおおよその高さ( 図5)を抽出するために、2つの緑色のラインマーカーを使用してください。
表面粗さは、試料の平坦な頂部で得ることができます。 - 必要に応じて他のソフトウェアにインポートする.JPEG形式で、最終的な位相画像を保存します。
ダイナミック測定用のサンプルとデータ分析の5準備
- 加熱ステーションプレート上のマイクロ振動板を配置します。実験が終了するまで、サンプルをプレートから除去されることはありません。
- MICRのホログラムを記録しますO絞り部2,3それは変形解析のための基準として使用されて上述した手順に従うことにより、周囲温度で。
- コンピュータ上の位相データを保存します。
- 実験室の加熱プレートをオンにします。
- 温度ノブを使用して、50℃から300℃まで50℃刻みで温度を変化させます。各温度ステップでは、.JPEG形式の位相マップ画像を保存します。
- 変形データを取得するために記録された他の位相マップから初期周囲温度の位相マップを減算します。
注:この後処理工程が単純なMATLABコードで実現することができます。得られた別の相はMATLABにロードされ、単純マトリクス減算が行われます。次に別の変形段階の断面プロットを得ることができます。
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
上記のプロトコルは、CDHMシステムを用いたMEMSとマイクロデバイスを検査し、特徴付けるために設計されました。我々のシステムでは、単一モード光ファイバは、633nmの波長で動作するダイオードレーザに結合されています。発散ビーム構成には、再構成することができるホログラムを得るために、物体光と参照光路を一致させることが重要です。これは、システムに対するサンプルの慎重な垂直位置によって達成されます。計算されたラップされた位相画像では、縞の数は、システムの高さ位置を変更することにより、最小限に低減されます。これは、光路が一致することを保証する。 図4は、試料の適切な軸方向の位置決め後CDHMを用いた測定から得られた結果を示しています。データは、単一の画像からリアルタイムに得られます。この実験では、異なる高値と周期の格子パターンで構成されるUSAFターゲットはサンプルとして選択されます。上述したように、位相マップ( 図4A)は、単一の画像ホログラムから抽出されます。特定パターンのラインプロットは 、 図4Aに示されています。黄色の線( 図4A)は、試料上の断面の位置を表します。 2つの緑色のマーカ線は試料の高さの絶対値を推定するために使用されます。デジタルホログラフィックシステムの結果を検証するために、試料の原子間力顕微鏡(AFM)の調査が行われます。同じ試料領域の断面は、 図4Bに示されています。同じ構成については、2.1ナノメートルの高さの差は、AFM及びCDHM測定の間に見出されます。このように、2つの方法の間の比較はCDHMの能力を実証します。
具体的には、MEMSデバイスを特徴付けるために、MEMS電極の3D静的調査が行われます。装置は、金電極PATTとシリコンからなりますリフトオフプロセスを使用してerned。一般的に、シリコンベースのMEMSは、エッチングなどの高感度な方法を用いて製造するか、プロセスをリフトオフしています。両方の場合において、製造プロセス中にサンプルの形態の変化を定量化する能力は非常に重要である。 図5は、この試料の測定結果を示しています。サンプルの完全な3D形態を観察することができます。断面線( 図5A)のプロットは、検査のために使用することができる深さマップを示します。チャネルの深さは632 nmであることが見出され、電極間の横方向距離はまた、試料の完全な定量的な3次元解析を提供することが可能であることを示すCDHによって提供されます。他の寸法( 図5B)のプロットはCDHMも粗さの測定に適していることを証明する電極の表面粗さを示します。
MEMSの特徴付けのstaticアプリケーションはグラムでありますreat値ではなく、対象プロセスのほとんどは動的検査を必要とします。適切な記録方法を選択することにより、CDHMシステムは、静的と動的の両方の状況の検査と特徴付けマイクロデバイスが可能である。 図6は、異なる温度で得られたマイクロダイアフラムの3Dデータの系列を示します。ダイアフラムは、SOI(シリコン・オン・インシュレータ)ウェハ試料に薄板を接合することによって作製しました。試料を加熱プレート上に置かれます。熱変形を測定するために、温度は50°Cから300°Cまで開始50°Cステップで変化します。ホログラムの数値再構成は、各温度で行われます。周囲温度でホログラムと位相が以前に記録されています。これは、基準位相として使用されます。変形状態(熱負荷)と基準状態(周囲温度)の減算は、変形マップを与えます。 Dの熱変形のこのようにフルフィールド解析 iaphragmが得られる。 図6Gは、異なる温度のための変形を強調しています。この場合、ラインプロットは、測定は、静的測定の間に得られた結果と比較して有意な粗さを示すことを明らかにする。

図1.デジタルホログラフィ記録と再構成処理方式 。この図は、オブジェクトの三次元画像を得るために、2つのステップの処理の詳細を示しています。記録工程と、得られたホログラムの漫画が示されています。物体のホログラム、振幅及び位相(モジュロ2π)から抽出されます。位相が2π曖昧さを取り除くためにアンラップされます。 3D再構成が実行される。 この図の拡大版をご覧になるにはこちらをクリックしてください。
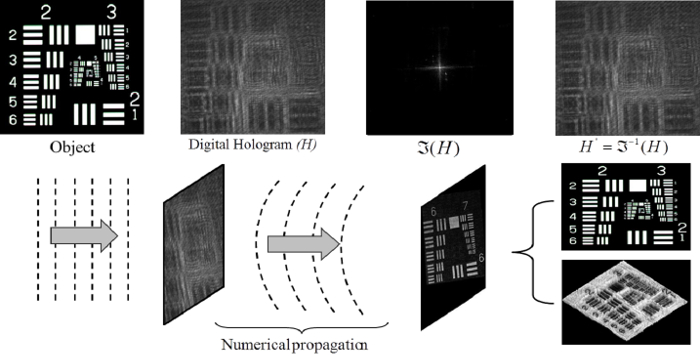
再構成プロセスの2.詳細なスキーム図 。この図は、再構成処理方式の概略図を示します。デジタルホログラムは、イメージが実行されるの(FFT)を記録し、高速フーリエ変換されます。スペクトルに有用な情報を選択した後、画像をフーリエ逆変換されます。そして、ホログラムの参照光と伝播の数値世代が独立したオブジェクトの位相と振幅を取得するためにシミュレートされている。 この図の拡大版をご覧になるにはこちらをクリックしてください。

CDHMセットアップの図3の回路図。この図は、(CDHMセットアップの概略図を示します

米国空軍のターゲットのCDHMと原子間力顕微鏡(AFM)高さ測定の間に、図4の比較。この図は、米国空軍の目標ミクロ構造からのラインプロットがCDHM(A)および原子間力顕微鏡(AFMを使用して得られた示しています)(B)。 この図の拡大版をご覧になるにはこちらをクリックしてください。

図5. 3DプロファイルおよびMEMSエルのラインプロット ectrodeデバイス。CDHMを用いてシリコンMEMS電極装置の測定結果。 x方向(A)中の特定の断面とy方向(B)と3D結果(C)を示すフィールド全体像で試料の深さを推定するために使用される緑のマーカーとラインプロット。 大きい方を表示するには、こちらをクリックしてください。この図のバージョン。

熱負荷下でのマイクロダイヤフラムの6変形試験図 。写真はマイクロ様々な熱負荷(AF)の下で振動板と、特定の断面(G)で の変形の進化を示す線グラフの3D変形画像を示します。トン= "_空白">この図の拡大版をご覧になるにはこちらをクリックしてください。
Subscription Required. Please recommend JoVE to your librarian.
Discussion
このレビューでは、我々は正確にデジタルホログラフィに頼ってコンパクトなシステムを使用して、別のMEMSデバイスの定量的な形態を回復するためのプロトコルを提供します。静的および動的の両方のモードでMEMSの特徴付けが実証されています。マイクロチャネルMEMSの定量的な3次元データが得られます。システムの精度を検証するために、結果がCDHMとAFMの間で比較しました。良好な一致は、デジタルホログラフィは3D撮像のための信頼できる技術であることを意味見出されます。その結果、システムが10 nmの深さ分解能が可能であることを示しています。さらに、マイクロチャネルで得られた結果は、試料の形態がMEMS製造プロセス中に制御することができるように、システムは、MEMSの特徴付けに使用することができることを示しています。また、CDHMを用いて得られた倍率がMEMSサイズ(4.2倍)のために使用されるべきであるものに相当します。システムはまた、全視野計測が可能です。 COMこれはかなりの資産であります長いスキャン測定を必要とするような共焦点顕微鏡など通常のMEMS検査のために使用される技術に削減します。また、システムの横方向の分解能を容易UVレーザーに赤色ダイオードレーザーを変更することによって改善することができます。最後に、システムの高感度は、粗さの測定を可能にします。
マイクロダイヤフラムの動的測定はCDHM熱や電気負荷が印加されたときにMEMSデバイスの変形を観察するための適切なツールであることがわかります。変形マップを構築するために二重露光法を用いて、微小振動板の動的変形試験を行います。一つは、振動板形状を注意深くリアルタイムで観察することができることを見ることができる。三次元形態は、1つの画像のみを使用して計算されるので、この結果は可能です。しかし、異なる静的測定中に観察されたものから、熱負荷を使用して動的な測定が異常にラフなプロファイルを示しています。実際、1はラインプロットのshを検討することもでき静的な測定結果と比較した場合、ラフとして、図6Gに所有しています。システムが10nmと小さい構造を解決できるように、粗さは、被写体からしていないようです。可能な説明は、加熱ステージで発生した熱は、2つの波の間の干渉を摂動し、物体波の波面に影響を与えることであることができます。また、動的な研究が電気負荷12を用いたMEMS上CDHMを使用して行われており、この粗さが表示されているようだしません。
プロトコルは、サンプル垂直位置、再構成距離の選択、再構成法、振動のない環境とCCD上の縞の品質など、いくつかの重要なステップが含まれています。信頼性の高い、安定した結果を確実にするために、すべての手順を慎重に実行する必要があります。例えば、物体ビーム経路は、例えば 、基準と同じにする必要があり、システムへのサンプルの距離が重要ですCCD上の明確な干渉縞を得ることができます。また、数値再構成距離が十分にホログラムが像平面で再構成されることを保証するように調整されるべきです。最後に、レーザーの波長の半分よりも高いシャープな構造を有するサンプルは、信頼性の低い位相結果を引き起こします。実際に、位相ジャンプは、アンラップ位相誤差に起因する表示されることがあります。
これらの結果は、MEMSデバイスの3次元定量的な深さ測定を実行するCDHMの能力を示します。 MEMSとマイクロエレクトロニクス産業において遭遇するように、実際に、反射面のため、CDHMは現場プロセス測定ならびにマイクロデバイスを特徴付けるし、検査するために使用することができる携帯型のシステムです。バリデーション試験は、システムによって得られた結果は非常に信頼性があることを示しています。 CDHMより大きな走査領域をカバーし、リアルタイムの測定を行うことができます。このようなAFMまたは共焦点マイクロなどの他の技術に比べて大きな利点であります時間のかかるスキャンを必要とするコピー。提示された結果に加えて、システムは、他のMEMSプロセスにおいて貴重な情報を与えることができます。例えば、MEMSデバイス11における共振モードを観察する時間平均化と強度の画像を使用して非常に速いプロセス測定で実証能力を有します。今後の課題は、リアルタイムでイメージングに電気負荷の下でMEMSカンチレバーのたわみ変化を集中します。
Subscription Required. Please recommend JoVE to your librarian.
Materials
| Name | Company | Catalog Number | Comments |
| 2 MP Camera | Imaging Source | DMX 41BU02 | used to record the hologram. 4.65 microns pixel size |
| Motorized X,Y,Z Translation Stage | Zaber Technology | TLS28-M | Holder for the system |
| Beam splitter | Edmund optics | 49-003 | Cube Beam splitter. Separate and recombine the object and reference beam |
| Laser | Micro Laser Systems, Inc. | SRT-F635S-20/OSYS | Diode laser |
| Mirror | Edmund Optics | #43-412-566 | 1" Dia. Protected Gold, λ/20 Flat Zerodur |
| monomode Fiber | Thorlabs | S405-XP | Single Mode Optical Fiber, 400 - 680 nm, Ø 125 µm Cladding |
| Sample holder | Edmund Optics | #39-930 | Ideal Positioning Platform, ±35 mm Travel in Both X and Y |
| Hotplate | Thermolyne Mirak hotplate | Barnstead International HP72935-60 | temperature range 40-370 °C |
| Holoscope Software | d'Optron Pte Ltd | software developed by the NTU researchers |
References
- Maluf, N. An introduction to Microelectromechanical Systems. , Artech House. Boston. (2002).
- Novak, E.
- Gabor, D.
- Schnars, U., Jüptner, W. Direct recording of holograms by a CCD target and numerical reconstruction. Appl. Opt. 33 (2), 179-181 (1994).
- Schnars, U., Jüptner, W. Digital recording and numerical reconstruction of holograms. Meas. Sci. Technol. 13 (9), 85-101 (2002).
- Pedrini, G., Schedin, S., Tiziani, H. Lensless digital holographic interferometry for the measurement of large objects. Opt. Commun. 171 (1-3), 29-36 (1999).
- Dubois, F., Joannes, L., Legros, J. C. Improved three-dimensional imaging with a digital holography microscope with a source of partial spatial coherence. Appl. Opt. 38 (34), 7085-7094 (1999).
- Lei, X., Xiaoyuan, P., Jianmin, M., Asundi, A. K. Studies of digital microscopic holography with applications to microstructure testing. Appl. Opt. 40 (28), 5046-5051 (2001).
- Cuche, E., Bevilacqua, F., Depeursinge, C. Digital holography for quantitative phase-contrast imaging. Opt. Lett. 24 (5), 291-293 (1999).
- Qu, W., Yu, Y., Chee Oi, C., Raj Singh, V., Asundi, A. Quasi-physical phase compensation in digital holographic microscopy. J. Opt. Soc. Am. 26 (9), 2005-2011 (2009).
- Schedin, S., Pedrini, G., Tiziani, H. J., Santoyo, F. M. Simultaneous three-dimensional dynamic deformation measurements with pulsed digital holography. Appl. Opt. 38 (34), 7056-7062 (1999).
- Lei, X., Xiaoyuan, P., Jianmin, M., Asundi, A. K. Development and validation of digital microholo interferometric system for micromechanical testing. Proc. SPIE. 4778, 11-20 (2002).
- Qu, W., Bhattacharya, K., Choo, C. O., Yu, Y., Asundi, A. Transmission digital holographic microscopy based on a beam-splitter cube interferometer. Appl. Opt. 48 (15), 2778-2783 (2009).
- Potcoava, M. C., Kim, M. K. Fingerprint biometry applications of digital holography and low-coherence interferography. Appl. Opt. 48 (34), 9-15 (2009).
- Kolman, P., Chmelìk, R.
- Lee, M., Yaglidere, O., Ozcan, A. Field-portable reflection and transmission microscopy based on lensless holography. Biomed. Opt. Express. 2 (9), 2721-2730 (2011).
- Mico, V., Zalevsky, Z., Garcìa, J. Common-path phase-shifting digital holographic microscopy: a way to quantitative phase imaging and superresolution. Opt. Commun. 281 (17), 4273-4281 (2008).
- Singh, V. R., Miao, J., Wang, Z., Hedge, G. M., Asundi, A. Dynamic characterization of MEMS diaphragm using time averaged in-line digital holography. Opt. Commun. 280 (2), 285-290 (2007).
- Singh, V. R., Anderi, A., Gorecki, C., Nieradko, L., Asundi, A. Characterization of MEMS cantilevers lensless digital holographic microscope. Proc. SPIE. 6995, 69950F-1 (2008).
- Schmidt, J. D. Numerical Simulation of Optical Wave Propagation with Examples in MATLAB. SPIE PRESS BOOK. , (2010).
- Zhao, M., Huang, L., Zhang, Q. C., Su, X. Y., Asundi, A., Qian, K. M. Quality-guided phase unwrapping technique: comparison of quality maps and guiding strategies. Appl. Opt. 50 (33), 6214-6224 (2011).
- Wang, Z., Qu, W., Yang, F., Wen, Y., Asundi, A. A new autofocus method based on angular spectrum method in digital holography. Proc. SPIE. 9449, 2-7 (2015).
