大多数动物不得不在一个高度成熟和可控的方式移动的能力。破译遗传基础底层运动控制它是强制性的定量评估不同的行为模式。在这方面,果蝇可作为理想模型。自由飞行果蝇的跟踪是诱人的1-4但果蝇幼虫在相对 低的速度爬行发生在两个维度,因此可以很容易地监测。基于摄像头的设置结合适当的照明是用来采集图像5。这两个事件或透射光受雇于行为实验6,7。然而,由于在幼虫和幼虫运动的爬行表面忠实记录的可能光反射的半透明体可以是具有挑战性的。为了克服这些问题,一些复杂的方法已被设计出来。最近,暗视场照明被引入,以提高前景/背景续RAST 8。作为替代基于相机的记录,透镜较少的光学成像和图像传感器较少片上采集技术已经引入9-11。
几个跟踪项目最近已经推出,其中包括商业软件12和定制解决方案。高通量的跟踪程序的例子是多蠕虫跟踪(MWT)13 Multianimal步态和跟踪(MAGAT)8。两者都在共同的,即多种动物可以跟踪在一个单一的旷场舞台,使得碰撞动物导致多个新的动物的身份。为了克服此限制,一个多井设置导入分离12动物进入各个孔14。单一个体的运动的精确定量可以通过使用一个可移动的跟踪阶段结合用显微镜15来实现。然而,所有这些方法要么成本效率不高,缺乏足够的重溶液或太费时高通量的表型。
为了克服上述局限性,我们已经开发FIM( 基于FTIR的成像方法)根据受抑全内反射(FTIR)16( 图1)。这种新的成像方法提供了前所未有的高对比度,甚至允许爬行动物16的多色记录。这种方便和有效的方法的基本原理很简单。丙烯酸玻璃板上充斥着光( 例如,875纳米红外线)。由于丙烯酸类玻璃和空气的折射率不同,则光被完全在玻璃/空气界面处反射。丙烯酸类玻璃的无加热注意到16。仅当具有较高折射率的物体触摸光线充足的表,可以点亮输入这些对象。如果动物触摸表面,光被反射,并且可以从下面( 图1)捕获。其结果,只使触头动物的区域表现为一个亮点,它可以让影像细节与整体的黑色背景。因此,FIM-成像可以录制完美的电影的计算机视觉算法。简单和坚固的使用FIM现在带来的复杂的动物行为的详细的高通量分析成范围,可用于研究的信息处理: 例如,嗅觉8,16;远景17或18 thermosensation。
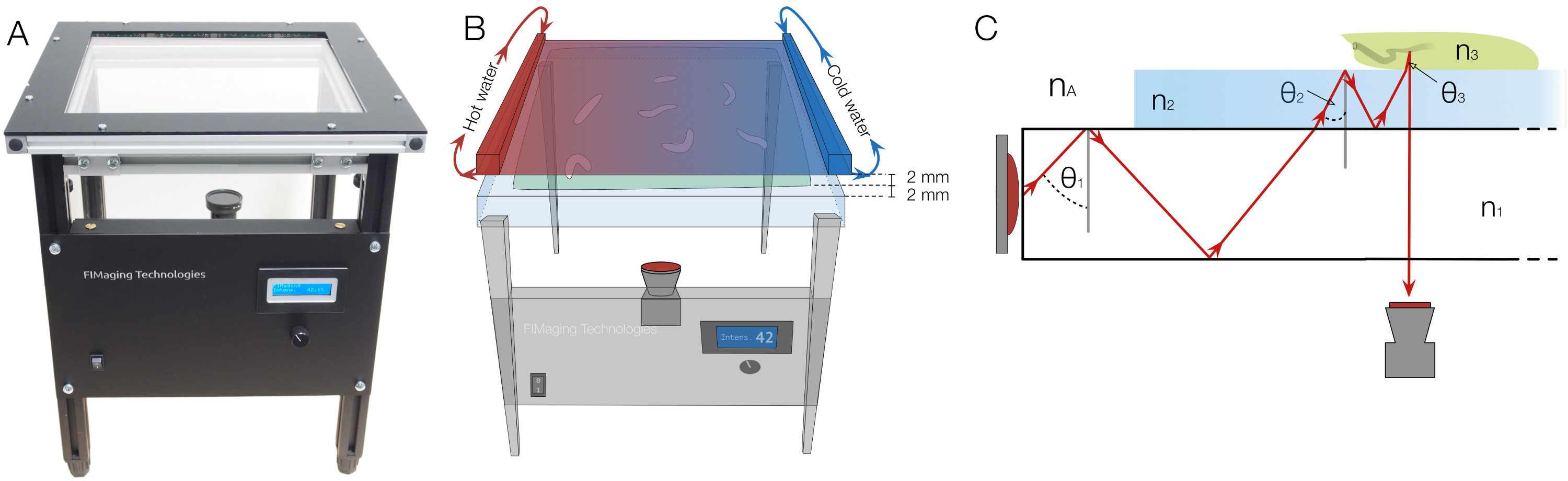
图1. FIM安装热刺激一体化和基本物理原理。 (A)的FIM设置。照明强度可以在前面板上进行调整。(B)提供一个热的刺激,一个黑色涂漆铝板,两边灌注热水和冷水,放在上面的琼脂表面2毫米其中本身为2毫米厚。梯度被建立在散热器板和琼脂由温度差(℃)受抑全内反射的物理原理:一个有机玻璃板由红外光照射。 θ1,θ2,θ3表示的光的反射角度。 N A,N 1,N 2和N 3表示的空气,亚克力玻璃,琼脂和幼虫的折射率分别履行不平等N A <N 1 <N 2 <N 3。由于折射,反射角度转变过程中发生变化。如果角度小于临界角,光不再反映,可以通过图层,可以从下面拍摄的。 请点击此处查看该图的放大版本。
在SP过程ectrum可由FIM被分析广阔。没有任何进一步的调整,FIM成像可用于监测果蝇( 图5B)的所有幼虫阶段或可用于遵循足部印痕成年果蝇19。 C的同样,轨迹线虫或涡扁虫的运动可以很容易地记录( 图5C)。真菌菌丝或根毛生长甚至分析似乎可行的19。在我们当前的FIM设置,4×16的红外发光二极管(IR-LED)的被集成到一个32×32 cm 2的丙烯酸系的玻璃板,被称为跟踪表( 图1)。对IR-LED的强度取决于在跟踪表中的对象,这可以通过经由脉宽调制(PWM),其连接到所述电路微控制器来容易地进行的重量进行调整。 FIM产生非常高的对比度的图像在宽范围的照明强度。重要的是,它根erates在已经很低的总体红外irridation了优异的成绩。
用红外滤波器的摄像机放置在跟踪表,它允许集成的额外刺激到设置在下面。热刺激可以通过热辐射板可以很容易地应用和光刺激被由LCD投影机施加。还加臭剂可以通过简单的盖子8被包含在梯度。对热梯度的实验中,散热板被分别灌注用热水和冷水在两侧,并放置幼虫( 图1B)超过2毫米。
的高对比度,高品质的电影的产生将打开的可能性为复杂的计算机图像分析,从而我们实施了FIMTrack软件来提取一大组的特征,从图像( 图2)。前六个主要特征是从动物( 图3A)的轮廓限定。这些功能提供基线为进一步的计算描述该动物的形状和其在某些刺激位置在给定的时间点( 图3B)6次要特征。目前,九三级功能是计算正在将时间方面,从而与主要和次要特征( 图3C)的动物的运动特征在一起。
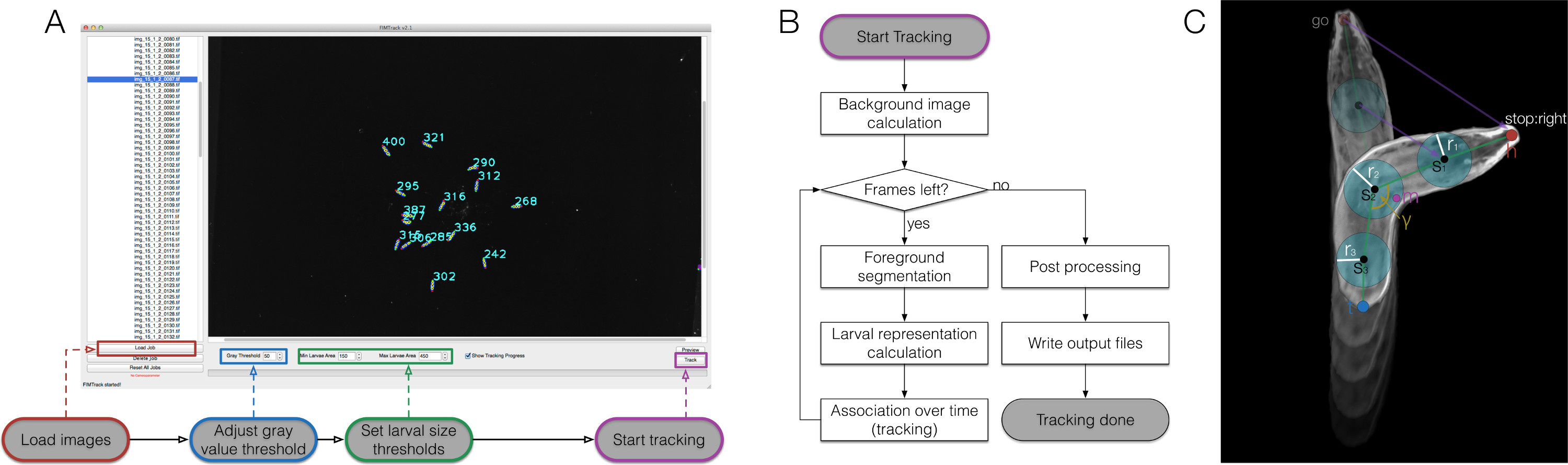
图2. FIMTrack概述,算法的工作流程和幼虫表示。 (A)如何使用FIMTrack。图像被加载。灰度值阈值和幼虫大小阈值定义单一的幼虫必须设置。幼虫面积必须在[分钟尺寸,最大尺寸。跟踪是通过突出显示的按钮启动。(B)跟踪的工作流程。被点击开始按钮后,背景图象为Calculated(最小强度随着时间的推移)。只要有左帧,幼虫是基于灰度阈值和min-和最大尺寸的阈值分割。对于幼虫表示计算所有分段(比较(C))。每一个新的模型被关联到一个给定的轨迹,如果一个有效的轨道是可用的。如果最后帧为止,最后完成后处理完成后的输出的生成。(C)的幼虫表示。动物包括一个头部和尾部点(H和T)的。这些点之间的脊点秒的任意奇数号i可以被设置具有半径R I。此外,质量为m和主体弯曲角度γ的中心被计算出来。几种运动相关的参数是由紫色的线条勾勒。 请点击此处查看该图的放大版本。

图由FIMTrack计算3.特点。 (A)主要功能基于动物的轮廓上。(B)二次特点的基础上,主要功能。(C)第三功能的基础上,在连续帧的和额外的投入主要功能,请点击这里查看这是一个更大的版本数字。
