De meeste dieren de mogelijkheid om te bewegen in een zeer geavanceerde gecontroleerde manier. Om de genetische basis onderliggende motoriek controle te ontcijferen is het verplicht om verschillende gedragspatronen kwantitatief te beoordelen. In dit opzicht kan Drosophila dienen als een ideaal model. Tracking van vrij vliegen Drosophila is verleidelijk 1-4 maar kruipen van Drosophila larven gebeurt in twee dimensies bij relatief lage snelheid en kan dus eenvoudig worden gecontroleerd. Camera-gebaseerde opstellingen in combinatie met de juiste belichting worden gebruikt om beelden 5 verwerven. Beide incident of doorgelaten licht wordt gebruikt in gedragsexperimenten 6,7. Echter, als gevolg van de semi-doorschijnend lichaam van de larven en mogelijke licht reflecties van de kruipende oppervlak getrouwe wijze vastleggen van larvale bewegingen kan een uitdaging zijn. Om dergelijke problemen te overwinnen, hebben sommige complexe methoden ontwikkeld. Onlangs werd donker veld verlichting geïntroduceerd op de voorgrond / achtergrond cont verbeterenrast 8. Als alternatief voor cameragebaseerde opname, lens minder optische beeldvorming en-sensorloze on-chip acquisitietechnieken geïntroduceerd 9-11.
Verschillende opsporingsprogramma's zijn onlangs geïntroduceerd, waaronder de handel verkrijgbare software 12 en maatwerkoplossingen. Voorbeelden voor high-throughput opsporingsprogramma's zijn de Multi Worm Tracker (MWT) 13 en Multianimal Gait En Track (Magat) 8. Beide hebben met elkaar gemeen, dat meerdere dieren kunnen worden bijgehouden in een enkele open-veld arena zodat botsende dieren leiden tot meerdere nieuwe dier identiteiten. Om deze beperking te omzeilen, werd een multi-well setup geïntroduceerd scheiden van 12 dieren in de individuele putten 14. Nauwkeurige kwantificering van beweging van afzonderlijke individuen kan worden bereikt door een beweegbare tracking-fase in combinatie met een microscoop 15. Al deze methoden zijn ofwel kosteninefficiënte, onvoldoende reoplossing of te tijdrovend voor high throughput fenotypering.
Om de bovengenoemde beperkingen te overwinnen, ontwikkelden we FIM (FTIR-based Imaging Method) op basis van gefrustreerde totale interne reflectie (FTIR) 16 (Figuur 1). Deze nieuwe imaging benadering biedt een ongekend hoog contrast en maakt zelfs multi-color opname van kruipende dieren 16. Het onderliggende principe van deze handige en effectieve methode is eenvoudig. Een acrylglas plaat wordt overspoeld met licht (bijvoorbeeld 875 nm infrarood). Vanwege de verschillende brekingsindices van acrylglas en lucht, wordt het licht volledig weerspiegeld in het glas / lucht grens. Geen verwarming van het acrylglas wordt opgemerkt 16. Alleen als objecten met een hogere brekingsindex raken de lichte tafel, kan het licht voert deze objecten. Indien de dieren het oppervlak raken, wordt licht gereflecteerd en kan worden opgenomen uit hieronder (figuur 1). Bijgevolg alleen contactgebied van de dieren verschijnt als een lichtpuntje, die een gedetailleerde beeldvorming mogelijk maakt met een totale zwarte achtergrond. Zo FIM-imaging maakt het mogelijk om perfect films voor computer vision algoritmes opnemen. De eenvoudige en robuuste gebruik van FIM brengt nu gedetailleerde hoge doorvoer analyse van complexe dierlijk gedrag in bereik en kan worden gebruikt voor het bestuderen van informatieverwerking: bijvoorbeeld reukzin 8, 16; vision 17 of thermosensation 18.
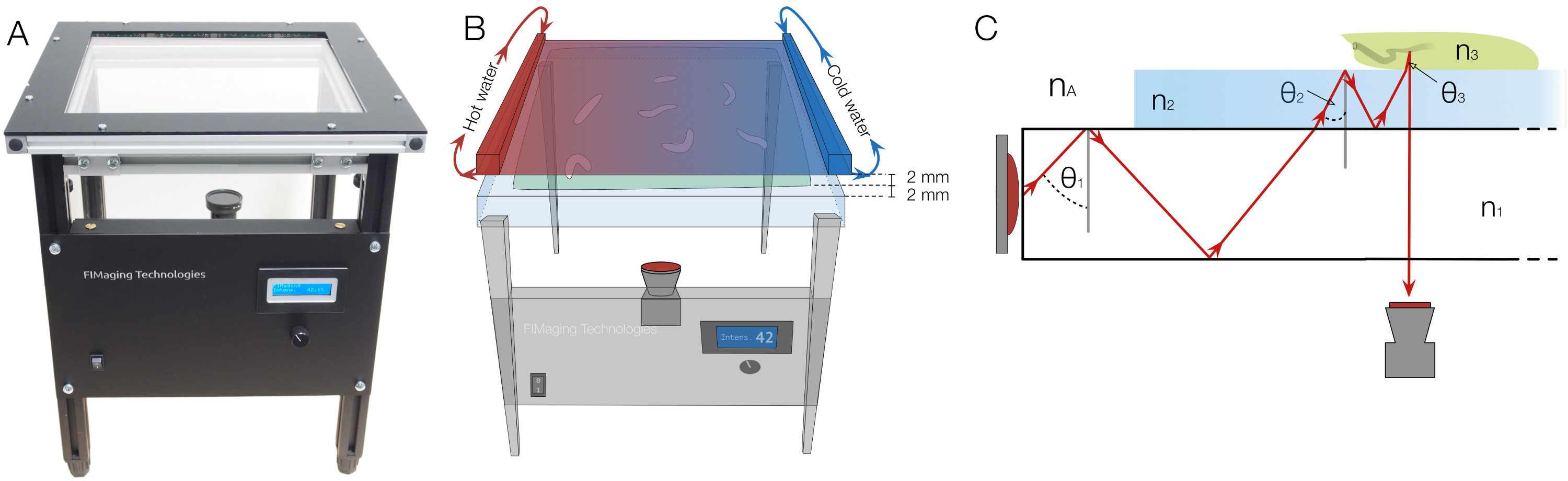
Figuur 1. FIM setup met warmte-stimulus-integratie en de onderliggende fysische principes. (A) De FIM setup. Lichtintensiteit kan op het voorpaneel worden geregeld. (B) Om een warmte stimulans te leveren, een zwart gelakte aluminium plaat, perfusie met warm en koud water aan beide zijden, wordt geplaatst 2 mm boven de agar oppervlak datzelf is 2 mm dik. De gradiënt is gevestigd op het vuur radiator plaat en de agar door de temperatuurverschillen (C) Het natuurkundige principe van gefrustreerde totale interne reflectie. Een acrylglas plaat wordt verlicht door infrarood licht. θ 1, θ 2, en θ 3 geven de lichtreflectie hoeken. n A, n 1, n 2 en n 3 duiden de brekingsindex van lucht, acrylglas, agar en de larve respectievelijk en voldoen aan de ongelijkheid n A <n 1 <n 2 <n 3. Door breking, verandert de reflectiehoek tijdens de overgang. Als de hoek onder de kritische hoek, wordt het licht niet meer terug te vinden, kan door de lagen en kunnen worden vastgelegd van onderen. Klik hier om een grotere versie van deze afbeelding te bekijken.
De spectrum processen die kunnen worden geanalyseerd door FIM breed. Zonder verdere aanpassingen kunnen FIM beeldvorming worden gebruikt om alle larvale stadia van Drosophila (Figuur 5B) monitor of kan worden gebruikt om de voetafdrukken van volwassen Drosophila 19 volgen. Ook de banen van C. elegans of de beweging van planarian platwormen kan eenvoudig worden opgenomen (Figuur 5C). Zelfs de analyse van schimmel Schimmeldraad of wortel haar groei lijkt haalbaar 19. In de huidige FIM opstart, worden 4 x 16 infrarood licht emitterende diodes (IR LEDs) geïntegreerd in een 32 x 32 cm 2 acrylglas plaat, genaamd de tabel volgen (figuur 1). De intensiteit van de IR-LED's wordt aangepast afhankelijk van het gewicht van de voorwerpen op de tracking tafel, die gemakkelijk kunnen worden uitgevoerd door een microcontroller verbonden met het circuit via pulsbreedtemodulatie (PWM). Levert FIM zeer contrastrijke beelden over een breed scala van verlichting intensiteiten. Belangrijker is dat het genteert uitstekende resultaten bij al lage totale infrarood irridation.
Een camera met een infrarood filter onder het volgen tabel, die de integratie van extra stimuli laat in de opstelling geplaatst. Warmte stimuli kan gemakkelijk door een warmte radiator plaat worden toegepast en licht stimuli worden door een LCD-projector toegepast. Ook geurstoffen kunnen in verlopen worden opgenomen door eenvoudige deksels 8. Voor warmte gradiënt experimenten wordt de warmte radiator plaat doorbloed met warm en koud water aan beide zijden respectievelijk geplaatst 2 mm boven de larven (Figuur 1B).
Het produceren van een hoog contrast, hoge kwaliteit films opent de mogelijkheid voor geavanceerde computer gebaseerde beeldanalyse, waardoor implementeerden we de FIMTrack software om een grote reeks van functies uit beelden te extraheren (Figuur 2). Eerste zes primaire functies gedefinieerd van de contour van het dier (Figuur 3A). Deze functies bieden de basislijnvoor verdere berekening zes secundaire functies die de dieren vorm en zijn in bepaalde stimuli op een bepaald tijdstip (Figuur 3B). Momenteel zijn negen tertiaire kenmerken berekend dat integreren temporele aspecten en daarmee karakteriseren de voortbeweging van het dier tezamen met de primaire en secundaire kenmerken (figuur 3C).
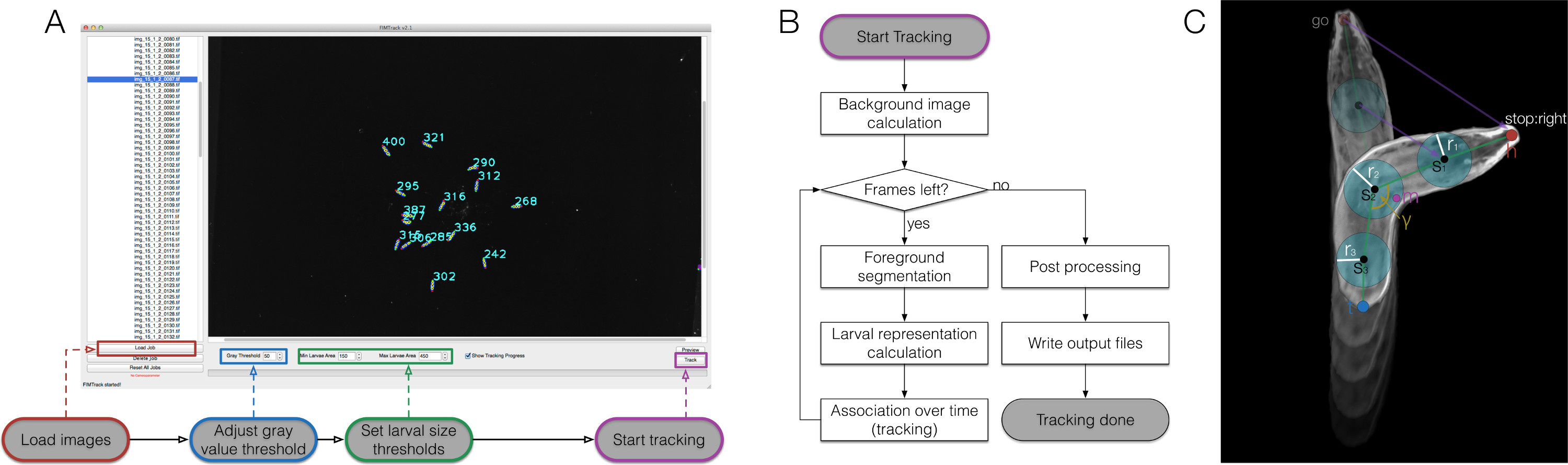
Figuur 2. FIMTrack overzicht, algoritmische workflow en larvale vertegenwoordiging. (A) Hoe FIMTrack gebruiken. De afbeeldingen worden geladen. Grijswaarde drempel en larvale drempels definiëren van enkele larven moeten worden ingesteld. De larvale moet gelegen zijn op [min-size, max-size]. Tracking wordt gestart door de gemarkeerde knop. (B) Tracking workflow. Na de start knop wordt geklikt, de achtergrondafbeelding is calculated (minimale intensiteiten in de tijd). Zolang er frames verlaten, worden de larven gesegmenteerd op basis van de grijsdrempelwaarde en de min- en max-drempelwaarde. Voor alle segmentaties de larvale representaties berekend (te vergelijken (C)). Elk nieuw model is gekoppeld aan een bepaald traject als een geldig nummer beschikbaar is. Als het laatste frame is bereikt, wordt de laatste hand nabewerking gedaan, gevolgd door de output genereren. (C) Larvale vertegenwoordiging. Het dier bestaat uit een kop en een staart punt (h en t). Tussen deze punten een willekeurig oneven aantal wervelkolom punten s kan ik worden ingesteld met een straal r i. Bovendien, het centrum van de massa m en het hoofdlichaam buighoek γ berekend. Verschillende motion gerelateerde parameters worden geschetst door paarse lijnen. Klik hier om een grotere versie van deze afbeelding te bekijken.

Figuur 3. Kenmerken berekend door FIMTrack. (A) Primaire functies op basis van de contour van de dieren. (B) Secundaire functies, op basis van de primaire functies. (C) Tertiaire functies, op basis van de primaire functies in opeenvolgende frames en extra ingangen Klik hier om een grotere versie van deze foto figuur.
