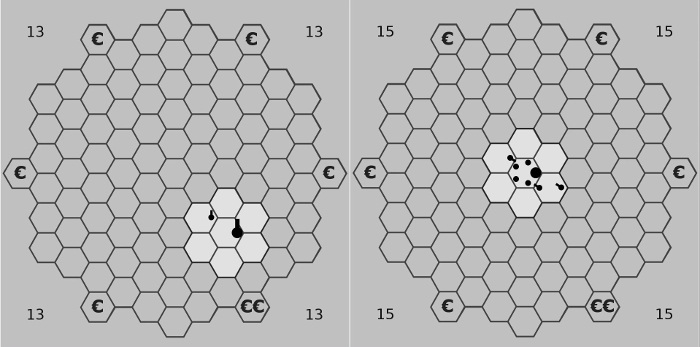
An initial experiment with the HoneyComb paradigm demonstrated that humans showed basic signs of flocking behavior, such as seeking the proximity of others, without being rewarded17. Subsequently, we addressed the question of how individual humans can be behaviorally coordinated to reach the same physical target/goal also investigated by Boos et al.1, focusing not only on unspecific flocking behavior, but also group coordination and leadership behavior. Using the above-described experiment-defined parameters, goal hexagon locations were defined, and a monetary reward option was used to examine shared goals based on shared incentives, as well as motivation toward group cohesion. Motivation to achieve group cohesion was enhanced by stipulating an additional reward based on how many other participants ended up in the same goal hexagon. Within each of the 40 ten-person groups, two subgroups (a minority group comprised of two randomly selected individuals and a majority group comprised of the remaining eight) were created by giving the following levels of information. The two minority group members were informed about the location of one two-euro prize hexagon and five one-euro prize hexagons (Figure 9, left). The eight members of the majority group were not informed about the two-euro prize hexagon and instead were shown the locations of six equally rewarded one-euro goal hexagons (Figure 9, right). None of the participants were told that there were different subgroups.
We designed our study questions according to Couzin et al.'s23 computer simulation model. Because the only information exchanged among the players were their abilities to perceive the movement of other players, we aimed to see (i) if this information was sufficient for the informed/higher rewarded minority group to coordinate the movements of the uninformed/lower rewarded majority group, and if so, (ii) how the double prize goal-informed minority group would/could lead the uninformed majority to their two-euro goal hexagon. As stated earlier, we restricted these study designs to two basic parameters of swarming behavior, 1) alignment (group members moving towards a goal hexagon) and 2) cohesion (group members tending toward moving as group). For the alignment parameter, we set up the six goal hexagons that granted a monetary payoff. For the cohesion parameter (i.e., making move choices that were coordinated with moves with fellow participants), we granted participants a reward based on the amount of avatars at the end that were in the same hexagon as their own.
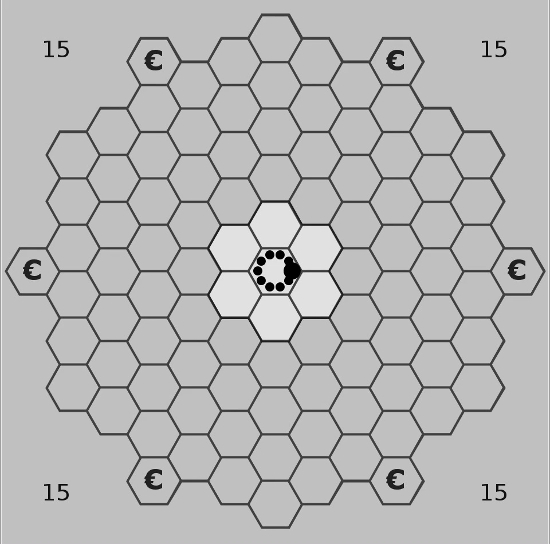
The HoneyComb playfield contains 97 hexagons. All participants' avatars began the game together in the honeycomb's middle hexagon. Each player was granted a maximum 15 move-count. All were restricted to move their avatar (via a mouse click) only across one of hexagon's six sides to an adjacent hexagon. The game ended when every avatar was on a payoff field or when every player had completely used their 15 move-count.
An additional experiment factor was implemented to answer a third study question: (iii) whether perception radius (global vs. local condition) of the other participants affects movement coordination. The perception of half of the 40 ten-person groups was restricted on a random basis, which meant that twenty groups (local condition) could perceive the movement of only those avatars adjacent to their avatar. The remaining twenty 10-person groups (global condition) could perceive all participants' avatar locations and movements.
To answer question (ii) [which movement characteristics of the minority groups led to more success (successfully reaching a goal field as a group and therefore greater monetary reward)], we defined and analyzed various movement behaviors including first mover, shared movement paths/directions of the two minority participants, path lengths, average time between moves, initial-move order among participants, Big Five personality characteristics (extraversion, openness, etc.), and computer literacy. The statistical procedure, a finite mixture model with two binomials, and detailed results are published in Boos et al.1.
Our study demonstrated that in a group of humans, assigned avatars in a 2D HoneyComb play field (moving according to the above-described parameters and conditions), 20% of them (the 2-person minority group) based solely on their movements could successfully lead the other 80%, even when their perception was restricted to only adjacent avatars on the playfield. Here, successful leadership of these 2-person minority group participants entailed that their fellow participants made similar initial moves and that these 2-person minority participants were first to make an initial move1 (Video 2). For detailed parameters of this group’s movement behavior, please see Table 2. An in-depth analysis of the group’s dispersion over time is provided in Figure 10. We also found, surprisingly, that neither personality variables nor computer literacy among these minority participants played a crucial role in their success.
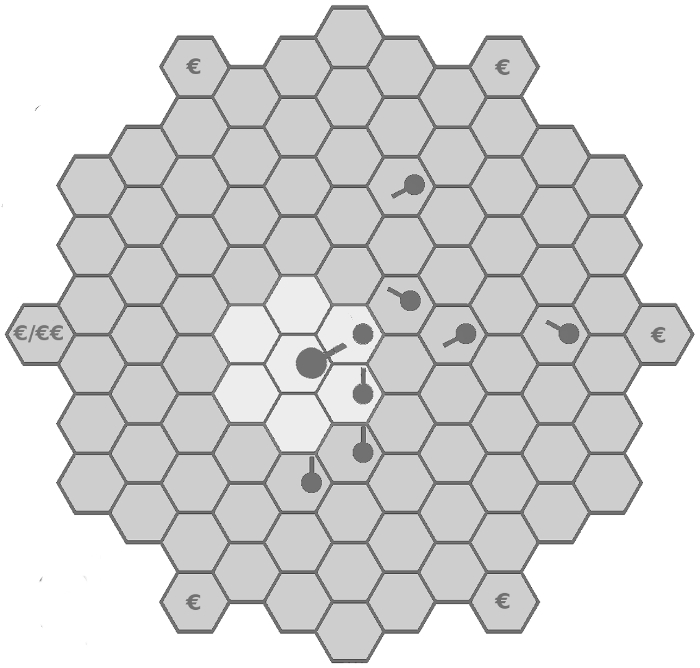
Figure 1: Playfield of the computer-based multi-agent game HoneyComb. Visual representation of human players as avatars (black dots) on a hexagon virtual playfield. Please click here to view a larger version of this figure.
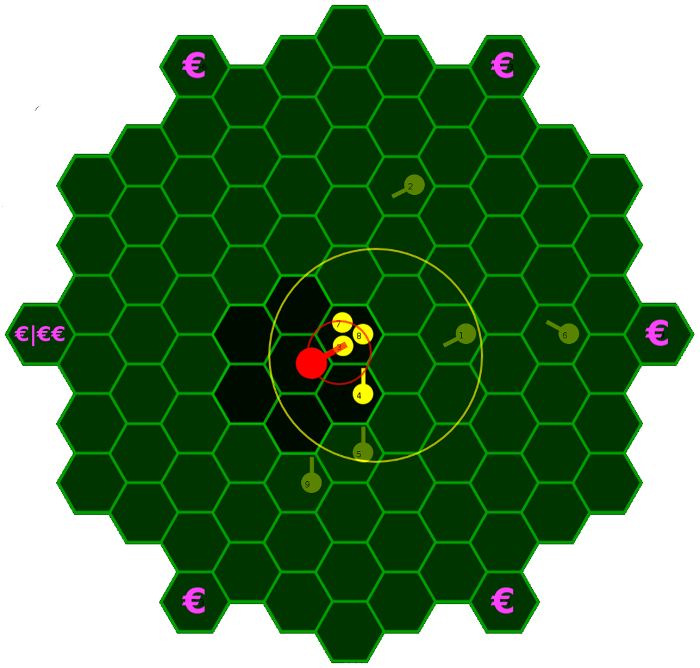
Figure 2: Local vs. global perspectives. Participants with local perspectives can only see other players' avatars within their visual range. In this case, the marked player (red) is only able to see 4 out of 9 co-players. A global perspective, if configured, would provide visibility of all co-players. Please click here to view a larger version of this figure.
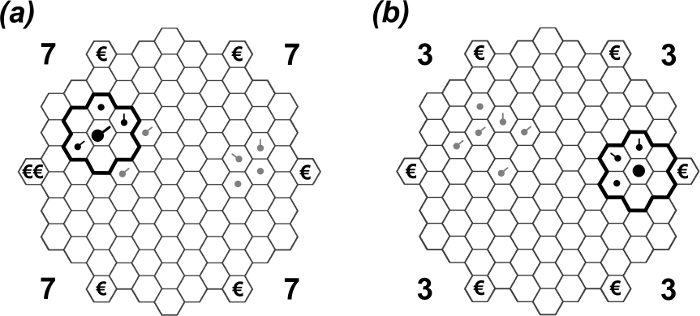
Figure 3: Monetary incentives. This illustration shows how monetary incentives can be implemented within the HoneyComb game. Avatars marked as grey are outside of the local perception radius and are thus invisible to the respective player. Two different points of view are shown. (a) Informed player: this player is endowed with one higher-rewarded goal field, which is marked as "€€", (b) uninformed player: this player is provided six equally lower-rewarded goal fields, which are marked as "€". Please click here to view a larger version of this figure.
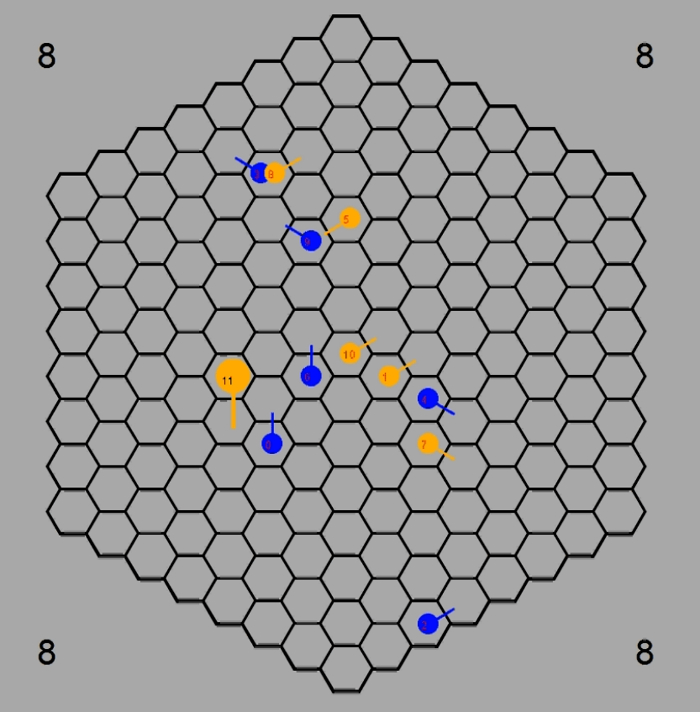
Figure 4: Subgroup avatar experiment. In this scenario, two sub-groups are created by coloring the participants' avatars as blue and yellow. Please click here to view a larger version of this figure.
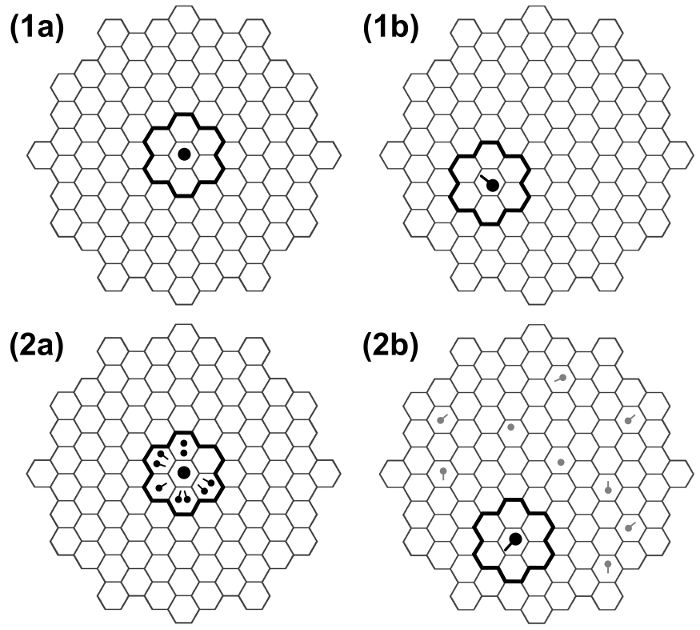
Figure 5: Single vs. joint game. This illustration shows two different settings from one player's point of view, comparable to Belz et al.17 (1a/b) Single game: co-players are invisible and cannot be found on the hexagon virtual playfield, (2a/b) joint game: co-players are visible as long as they stay within the local perception radius of other players. Please click here to view a larger version of this figure.
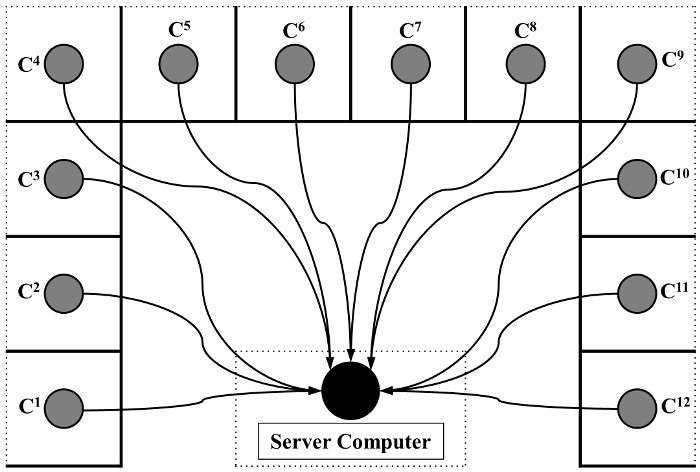
Figure 6: Server and client configuration. Ten to twelve notebooks (clients C1 through C12) should be arranged in the vicinity of (and connected to) the server computer. The use of partitions encasing each participant's workstation (indicated as thick lines) prohibits visual communication with others outside the virtual environment. Use of LAN-cables instead of WLAN is recommended due to less latency and more reliable data throughput. Please click here to view a larger version of this figure.

Figure 7: Contextual setting. Communication (sensory, visual, auditory) among participants is restricted due to the use of partition walls and earplugs. Please click here to view a larger version of this figure.
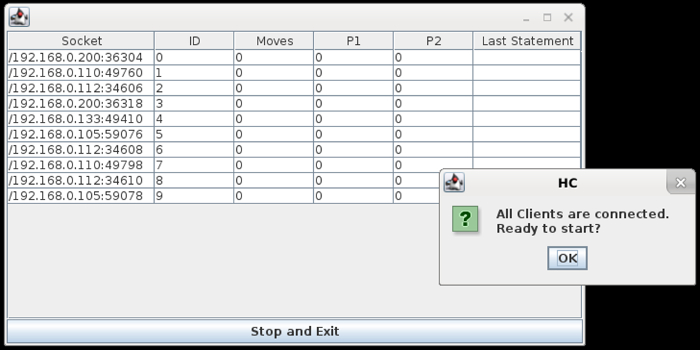
Figure 8: Graphic interface on the server. For each connected client, there is a line showing IP and other data (e.g., number of moves, position, amount to be paid to each player). Please click here to view a larger version of this figure.
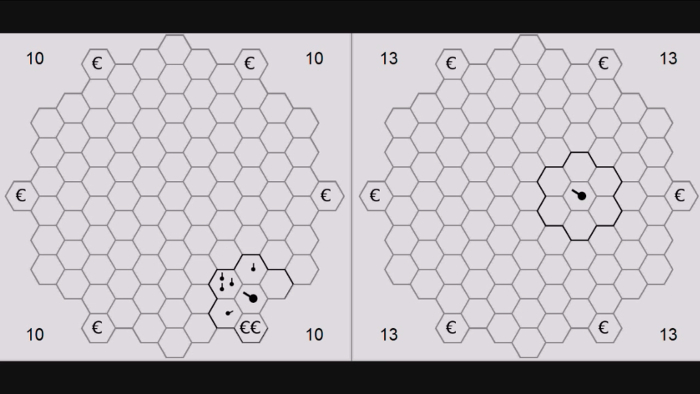
Figure 9: Successful leadership. On the left side, the screenshot shows one informed player approaching a monetary goal field (see also Figure 4), successfully leading five other players to his/her goal field. On the right side, an uninformed player lost sight of his/her co-players. Please click here to view a larger version of this figure.
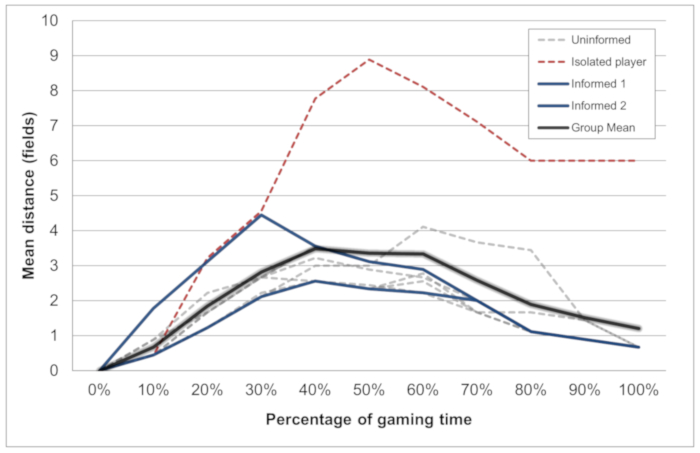
Figure 10: In-depth analysis of spatial dispersion over gaming time (group 44). Mean distance between group members over time for the whole group (group mean), compared with both players who were informed about the location of the higher-rewarded €€ goal-field (Informed 1, Informed 2), and eight uninformed players (Uninformed). By the end of the game, one uninformed player had lost the group and arrived on a € goal-field (Isolated player). Please click here to view a larger version of this figure.
Video 1: Example of collective movement from the perspective of an uninformed player (group 44). Please click here to view this video. (Right-click to download.)
Video 2: Example of collective movement from the perspectives of the two informed players in the same game as Video 1 (group 44). Please click here to view this video. (Right-click to download.)
| gnr | time | pid | s1 | s2 | ||
| … | ||||||
| 5 | 14:56:42,281 | 5 | 2 | 2 | ||
| 5 | 14:56:42,500 | 2 | 3 | 5 | ||
| … | ||||||
| 5 | 14:56:44,593 | 0 | 3 | 6 | NNug=2 | not_moved |
| 5 | 14:56:44,578 | 3 | 2 | 2 | ||
| 5 | 14:56:44,796 | 7 | 3 | 3 | ||
| 5 | 14:56:45,125 | 6 | -5 | -3 | ||
| 5 | 14:56:46,109 | 1 | 2 | 2 | ||
| 5 | 14:56:46,281 | 5 | 2 | 2 | not_moved | |
| 5 | 14:56:46,765 | 3 | 3 | 3 | ||
| 5 | 14:56:47,531 | 4 | 2 | 3 | not_moved | |
| 5 | 14:56:48,187 | 9 | 3 | 6 | NNug=2 | not_moved |
| 5 | 14:56:48,625 | 2 | 3 | 6 | NNug=2 | not_moved |
| 5 | 14:56:48,625 | 8 | 3 | 2 | not_moved | |
| 5 | 14:56:48,640 | 6 | -6 | -3 | NNug=1 | |
| 5 | 14:56:48,640 | 4 | 3 | 4 | ||
| 5 | 14:56:48,953 | 7 | 3 | 3 | not_moved | |
| 5 | 14:56:49,390 | 5 | 3 | 3 | ||
| … | ||||||
| 5 | 14:56:52,671 | 4 | 3 | 4 | not_moved | |
| 5 | 14:56:52,687 | 6 | -6 | -3 | NNug=1 | not_moved |
Table 1: Data format. Each participant's moves and associated timestamps on the hexagon virtual playfield are recorded as hexagonal coordinates in separate rows, enabling the use of hierarchical/mixed modelling. The table shows an excerpt of the dataset generated by a group consisting of 10 players (group 44).
| Group 44 (example) |
∑ Moves |
Rank of 1st move |
Latency | Payout | Final distance |
Distance to €€-field |
Time | % of field explored |
| (a) Individual level variables | ||||||||
| Player ID01 | 6 | 1 | 1,73 | 18 | 0,67 | 0 | – | – |
| Player ID1 | 6 | 10 | 3,74 | 9 | 0,67 | 0 | – | – |
| Player ID2 | 6 | 3 | 2,19 | 9 | 0,67 | 0 | – | – |
| Player ID3 | 7 | 9 | 2,68 | 9 | 0,67 | 0 | – | – |
| Player ID4 | 6 | 7 | 4,38 | 9 | 0,67 | 0 | – | – |
| Player ID5 | 9 | 8 | 3,98 | 9 | 0,67 | 0 | – | – |
| Player ID6 | 12 | 5 | 2,70 | 1 | 6,00 | 6 | – | – |
| Player ID71 | 6 | 6 | 4,96 | 18 | 0,67 | 0 | – | – |
| Player ID8 | 9 | 4 | 4,03 | 9 | 0,67 | 0 | – | – |
| Player ID9 | 6 | 2 | 2,45 | 9 | 0,67 | 0 | – | – |
| (b) Group level variables | ||||||||
| Uninformed | 7,63 | 5,88 | 3,27 | 8 | 1,33 | 0,75 | – | – |
| Informed | 6,00 | 4,00 | 3,35 | 18 | 0,67 | 0,00 | – | – |
| Whole group | 7,30 | – | 3,28 | 10 | 1,20 | 0,60 | 39,02 | 27,84 |
Table 2: Detailed results of group movement behavior analysis (group 44). Results are listed (a) for the individual level, and (b) for the group level. On the group level, means were calculated for the uninformed majority (eight players), informed minority (two players), and the whole group (10 players). 1Players with IDs 0 and 7 were randomly chosen to be informed about the location of the higher-rewarded €€ goal-field; ∑ Moves = total number of moves; Rank of 1st move = rank of the 1st move in relation to the other players; Latency = mean movement latency between two steps in sec.; Payout = individual reward after completion of the game in €; Final distance = average distance of each player to all remaining players by the end of the game; Distance to €€-field = distance to the €€ goal-field by the end of the game; Time = total duration of the game in sec.; % of fields explored = percentage of the total field (97 hexagons) explored by the group. Please see also Figure 10 for an in-depth analysis of the group’s dispersion over gaming time, Video 1 and Video 2 for the collective movement of the group, and Table 1 for an excerpt of movement data.
