


Summary
魚を数えると相対的な豊かさ (MaxN) とステレオ カメラ システムを回転を使用して魚の密度推定の新しい手法について述べる。我々 は、種特異的な検出能を推定するカメラ (Z 距離) からの距離を使用する方法も示します。
Abstract
魚の生態学的研究のカメラ システムの使用は、魚の長さを測定し推定魚量の実行可能な非抽出方法としてトラクションを得るために続けています。我々 は開発し、固定カメラ ツールと比較してサンプリングの努力を最大化するサンプリングの完全な 360 度をカバーする回転ステレオ ビデオ カメラ ツールを実装しました。魚の高精度で正確な測定を取得する静的なステレオ カメラ システムの能力の詳細な研究のさまざまなここでの焦点は回転カメラ システムを使用して魚の密度を数値化する方法論的アプローチの開発にあった。最初のアプローチは、MaxN は、保守的な魚数の最小数は、通常観察のカメラ調査にメトリックの変更を開発することでした。我々 は MaxN に最大魚観察カメラ システムの任意の特定の回転数を再定義します。ダブル カウントを避けるために予防措置を MaxN のこのメソッド可能性があります真の豊かさをより正確に反映固定カメラから得られるもの。第二に、ステレオ ビデオでは、魚を三次元空間にマッピングすることができます、ためには、それぞれの魚のカメラからの距離の正確な見積もりを取得できます。種特異的な地域調査を確立するカメラからの観測距離の 95% パーセン タイルを使用して、我々 は種は最大距離を用いた密度推定を希釈を回避しながら種の中で能の違いを考慮します。観察。能のこの範囲のための会計は魚元素を正確に推定するため重要です。この方法は応用科学と管理コンテキストの両方でステレオ ビデオ ツールを回転の統合を容易にするため。
Introduction
米国太平洋沿岸に沿う商業とレクリエーション鱈漁業 (例えば、複雑なロックフィッシュ (メバル属) とアイナメ (Ophiodon イネカメムシ)) に重要な種の多くは強く関連付けられて高浮彫、固い底生息地1,2,3,4,5。ステレオ ビデオ ドロップ カメラは、相対的な容易さと操作の簡単さのため岩が多い生息地で使用する魅力的な非抽出ツールです。様々 なステレオ ビデオ カメラ システムを開発し、-南半球、浅海生態系6,7,8,9,10で展開し、最近では、ビデオカメラ ドロップは太平洋沿岸11,12,13に沿って深層水岩礁域環境管理ツールとしてトラクションを得ています。我々 はより効率的に中央太平洋沿岸 (のテーブルを参照に沿う高救済海底の魚の個体数を特徴付けるためステレオ ビデオ カメラ システム (以下「ランダー」と呼ばれる) を使用してこれら既存のステレオ カメラのデザインを変更しよう材料)。カメラはドロップ場所14で海底の範囲の完全な 360 ° の許可、中央回転のバーに取り付けられていたために使用ランダー既存ビデオ システムよりも違いました。着陸機は、毎分、私たちは急速に豊かさと地域のコミュニティ構成の特徴し、少ないランダー展開と統計的検出力の同じレベルを達成するために完全な 1 回転を完了しました。(着陸構成の仕様に詳しくのスター (2016)14を参照)。私たちの調査でのカメラの回転を 8 種の豊富さと豊かさの特性を十分研究システムの予備実験が示唆。この決定は長い滴以上の種の豊富さと魚密度逓減の観察によって作られました。生態系/調査種の最適な浸漬時間を決定する新しいシステムでより長い浸漬時間を含む試験を実施することをお勧めします。
ペアのステレオ カメラを用いた調査面積両方と絶対魚密度を計算できます各ビデオの調査;しかし、カメラの回転の使用は、伝統的なフィッシュ カウント ・ メトリックの変更を必要とします。静止ビデオ システムは最もよく展開6,10魚の保守的な数として"MaxN"を使用します。伝統的な MaxN では、ダブル カウントが残っているし、フレームに戻って魚を避けるために 1 つのビデオ フレームで一緒に観察された特定種の魚の最大数について説明します。MaxN に存在する知られている魚の最小の数の見積もりをされているため、真魚豊富な6,10を過小評価する可能性があります。MaxN メトリックは、各カメラの回転で見られる魚の最大数を表すに定義されました。
前のステレオ ビデオのメソッドに 2 番目の変更だったという事実のための様々 なサイズ、色、その種を考慮して形状が確実な同定の別の最大距離を持っています。たとえば、 o. イネカメムシなど大型種独特の細長い形をしている、Squarespot メバル (メバル hopkinsi) など小さなと不可解な種と比較してはるかに大きい距離で確実に識別できます。能の最大範囲が異なるこれらそれぞれの種の着陸によってサンプリングされた効果的なエリアを変更します。ステレオ カメラを高精度 3 次元空間ですべての魚を置くことができる、ため 1 つは各魚がカメラからの距離を判断できます (すなわち、「Z 距離」、「z 軸」である名前を測定カメラの直線に垂直)。それぞれの種のすべての個人の 95%、(以下「95% Z 距離」) が観察された距離は調査領域の半径と考えられたし、調査対象総面積の計算に使用されました。種特異的な特性に加えて水濁度といった環境条件によって性が損なわれます。これらの要因は、時間と空間で異なりますので集計にのみ 95 %z 統計量を使用することが重要です。大型サンプルの高精度なできないが、任意の 1 つの個々 の調査は調査地で異なる場合があります。
下記プロトコルを作成し、これらの統計情報を使用する方法について説明します。フォーカスだった太平洋沿岸に沿う岩が多い生息地深海を特徴付けるが、変更された MaxN カウントの方法論は任意回転ドロップ カメラ システムへの適用が容易。魚類個体群の特性評価に必要なカメラの回転数は、地域の生態系のダイナミクスに依存が、変更された MaxN の概念は同じになります。同様に、ステレオ ビデオを分析する 3 D 写真測量ソフトを用い, に対し記載テクニックが簡単に適用ソフトウェア プラットフォーム間で三次元空間での魚の正確な位置は可能な限り。また、95 %z 距離の値を適用するアプローチと言える将来的にステレオ カメラ検出能の種特異的な範囲を考慮して、魚量をより正確に計算すると研究。
Subscription Required. Please recommend JoVE to your librarian.
Protocol
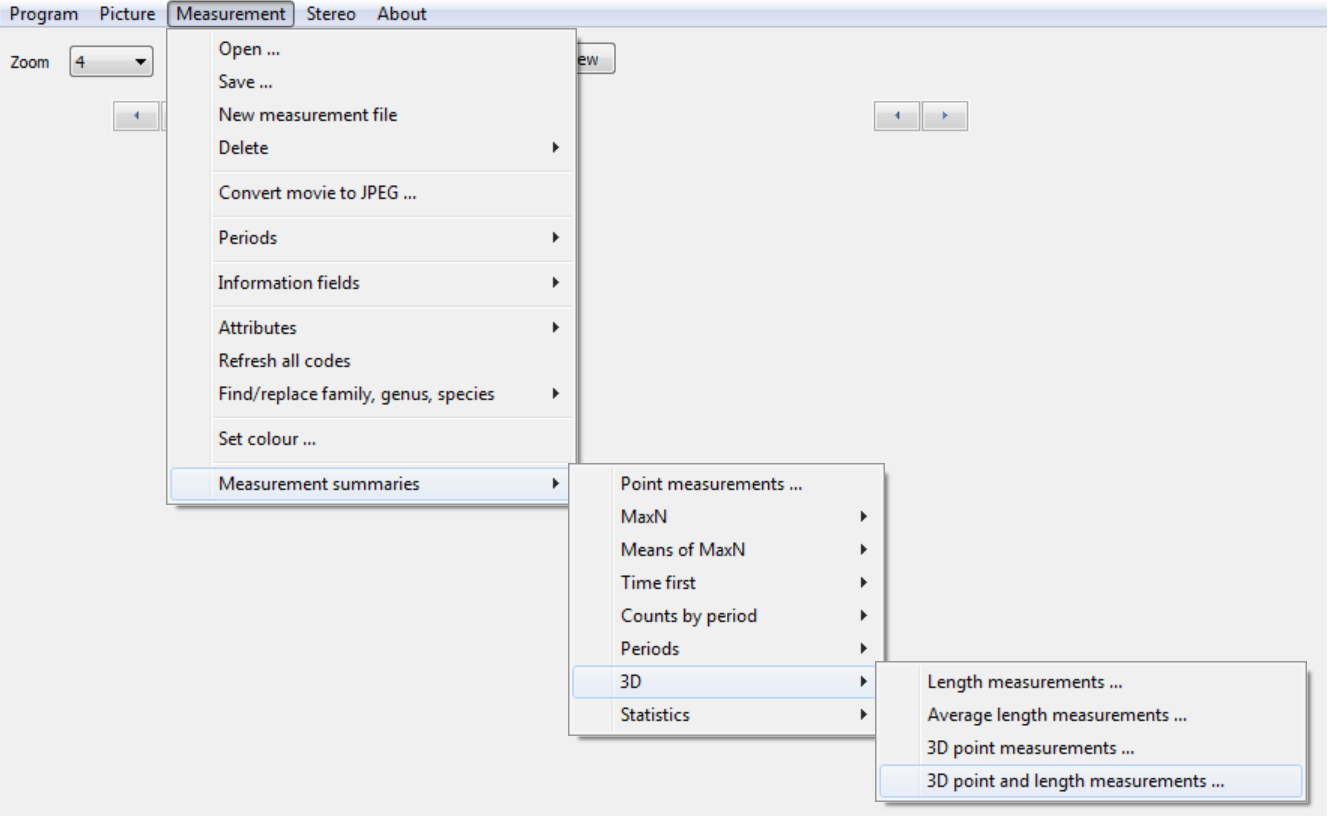
注: ソフトウェアの手順のスクリーン ショットは、補助ファイルとして含まれています。なおソフトウェアの手順に従って、選択したソフトウェアに固有 (材料の表を参照してください)。全体的なアプローチは、あらゆるステレオ ソフトウェア プラットフォームに拡張できます。
1. 分析用ステレオ カメラの映像を準備します。
注: 校正キューブを使用して校正をお勧めします。校正キューブは表面に正確に配置された反射ドットの三次元アルミ フレームです。校正ソフトウェアと組み合わせて使用する場合、校正キューブは高い精度と市松模様のアプローチ9より精度につながります。
- ステレオ調整ソフトウェア (図 1および図 2; ソフトウェア推薦の材料表を参照してください) が着陸機カメラを調整します。
注: 校正は、様々 な距離 (補助ビデオ 1参照) で知られていたサイズの目標を測定することによってフィールドで使用する前に確認することができます。既知のターゲットの長さの 2% 以内 (またはそれ以下) の 3 m の距離で 50 cm ターゲットの平均測定エラーをはずです。また、指定された校正のカメラの位置が互いに相対的に変更しない場合に有効であるに注意してください。世話をしすべてのサンプリングが実行されるまでは、カメラの意図しないめじろおしを避けるために不可欠です。 - (図 1、補足動画 2) 校正の着陸を使用してフィールドのデータを収集します。
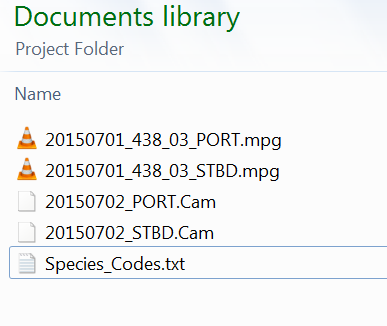
- 調査が完了したら、ビデオおよび校正ファイルを含む新しいプロジェクト フォルダーを作成します。
注: 各プロジェクト フォルダーする必要があります 5 つのファイルの最小値: 左と右"。カム"校正ファイル、左と右のビデオ ファイル (。MP4 または。AVI 形式の場合のみ)、および種のリスト (.txt 形式)。 - ステレオ計測ソフトウェアで新しい計測プロジェクトを起動し、適切なビデオおよび校正ファイルを読み込みます。
注: ソフトウェアのすべてのステップのスクリーン ショット、補助ファイル間で利用できます。- '測定' に移動 > '新しい計測ファイル'。
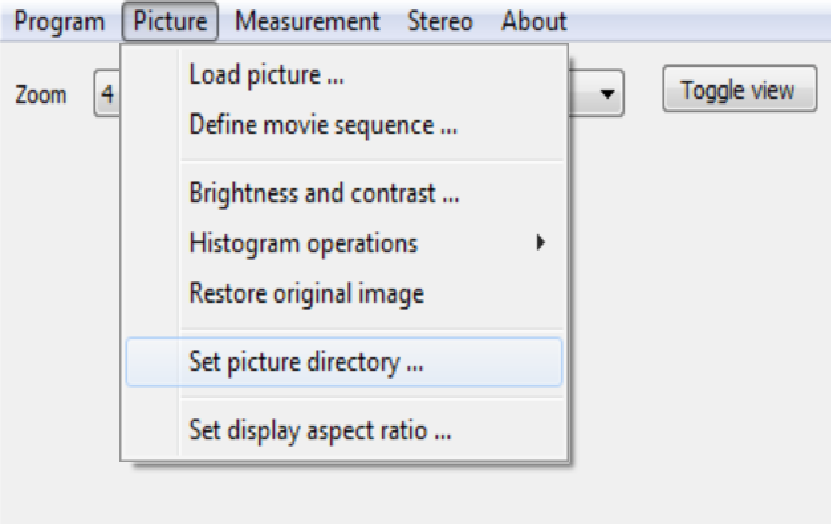
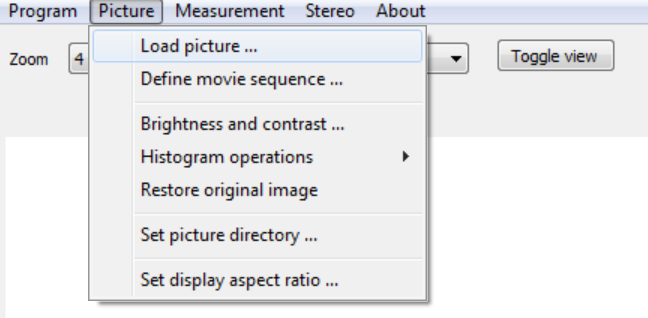
- '画像' に移動して画像のディレクトリを設定 > '設定画像ディレクトリ'、すべてのプロジェクト ファイルを含むフォルダーを選択します。
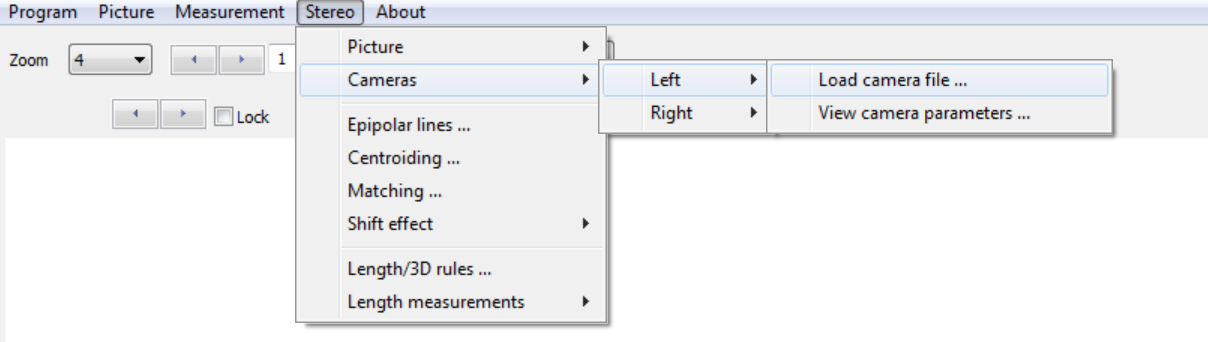
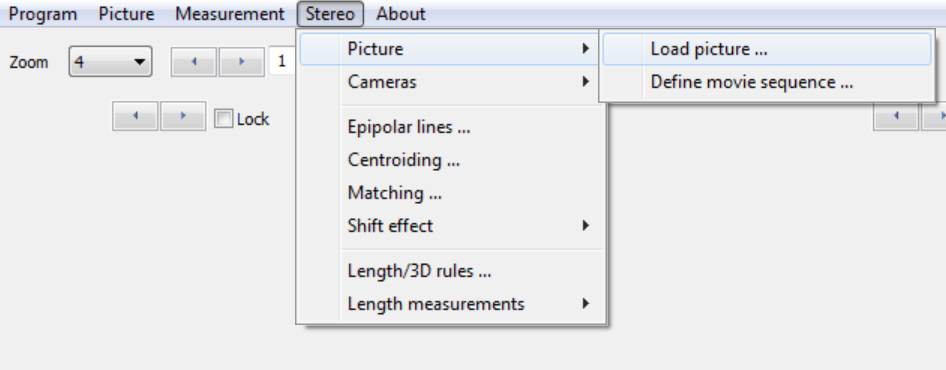
- 左のカメラをロード」。カム"ファイル 'ステレオ' に移動する > 'カメラ' > '左' > 'カメラ ファイルをロード'、適切なファイルを選択します。
- 1.4.3 右のカメラをロードする手順を繰り返します"。カム"ファイル
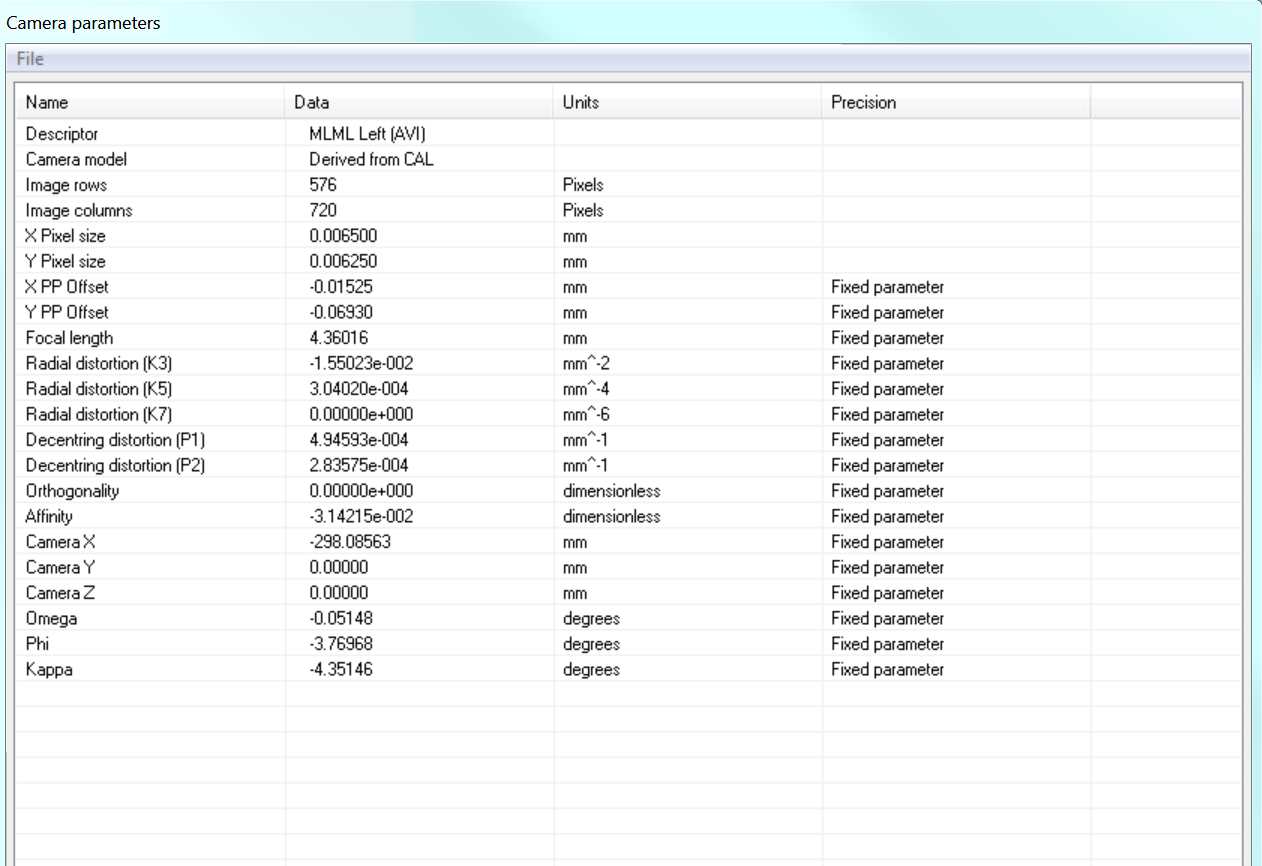
注: これらのファイル(例えば、ピクセル サイズ、アスペクト比、橈骨の歪み、脱中心化の歪み等)、各カメラのキャリブレーションの測定が含まれて、魚を測定し、距離からのカメラの (すなわちZ を計算に使用します。距離) です。 - '画像' に移動して左のビデオ ファイルの映画のシーケンスを定義 > '映画のシーケンスを定義する' と左のカメラのビデオ ファイルを選択します。
- '画像' を選択することによって計測ソフトウェアに左のビデオ ファイルを読み込む > '負荷画像'。
注: ビデオ ファイルを読み込む前に 'ロック' ボックスがオフを必ずです。これにより両方の映像が同時にロードします。 - ステレオ] メニューを使用して適切なビデオのムービー シーケンスと負荷ビデオ ファイルを定義 > '画像' > '映画のシーケンスを定義する' と 'ステレオ' > '画像' > '負荷画像'。
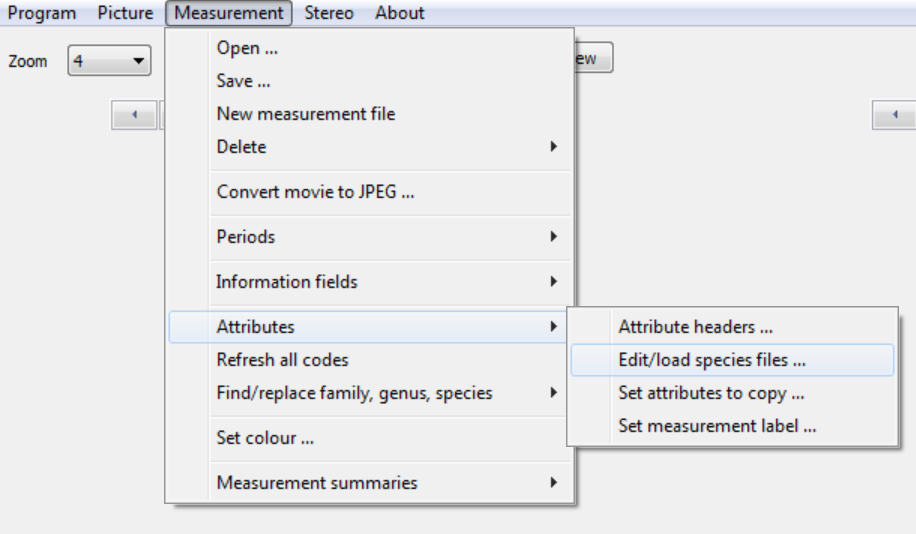
- '測定' に移動して種のリストを読み込む > '属性' > ' 編集/ロード種ファイル'。
- '情報フィールド' の下で調査の ID 情報を入力 > 'フィールドの値を編集' と作成するファイルを保存します。EMObs プロジェクト。
- 光フラッシュ、拍手、世界協定時刻 (UTC) タイムスタンプまたは両方のビデオで発生する時間特定のイベントを使用してビデオを同期します。
- UTC タイムスタンプを使用して、フレーム ステップはタイムスタンプが新しい第二開始するまで左のビデオで転送します。光フラッシュまたは拍手まで他のフレームを前方に発生します。
- フレーム ステップ タイム ・ スタンプが一致左ビデオまで前方右のビデオ。他のフレームは、正確な瞬間光フラッシュや拍手は、左のビデオと一致するまでに前進します。
注: ビデオを同じフレームに同期することが重要です。ビデオの同期は、定期的にビデオのタイムスタンプを使用して解析中にカメラ フレーム ドリフトを回避するチェックする必要があります。撮影手拍手は、その権利をテストする先頭とビデオの最後でも使用でき、左の動画は、同じフレームに同期されました。
- ビデオは一緒に遊ぶし、の同期を維持できるように「ロック」ボタンをクリックしてします。
2. ポイント数を生成し、MaxN を計算します。
注: それぞれの魚には、最も低い可能な分類学的解像度に 2D 符が当初付いています。魚の不透明な ID は、後で確認できるマーク必要があります。
- 完全な 360 度が使用されていることを確認する完全なカメラの回転が終了するまで魚をカウントを開始するを待ちます。また土砂がクリアされるまで待ちます (一般的に < 下部と接触後 1-2 分)。
- 着陸船は、その最初の回転を開始、すぐに右クリックして新しいサンプル期間を定義: '期間の定義' > '追加新しい開始期間'。「01」と最初の期間名を入力し、"OK"をクリックします。
- 着陸機が回転すると、左のカメラのみを使用して 2D ポイントとフレームに入ってくる魚をマーキングを開始します。
- 2 D のポイントを追加するには、を右クリックして、'Add point' を選択し、正しい種名を選択します。可能性が低い分類学的レベル、未知の新種の"OK"をクリックして '属' を選択するラベルします。
- 回転の結論まで 2.2.1 のステップにしたがってそれぞれの新しい魚をマークし続けます。
- 各追加ランダー回転 - 新しい期間が各カメラの回転の開始時に定義されていることを確実にプロトコル手順 2.1 2.2 を繰り返します。
注: 種累積曲線の決定 8 回転が、平均では、本研究では魚の量の特性を十分に使用されました。研究者は、特定のエコシステム内でカメラ回転の最適な数を表すための浸漬時間が長くなる上、追加のカメラの回転を予備テストの実施を検討してください。 - カメラの回転率個人の種特異的な数を計算します。
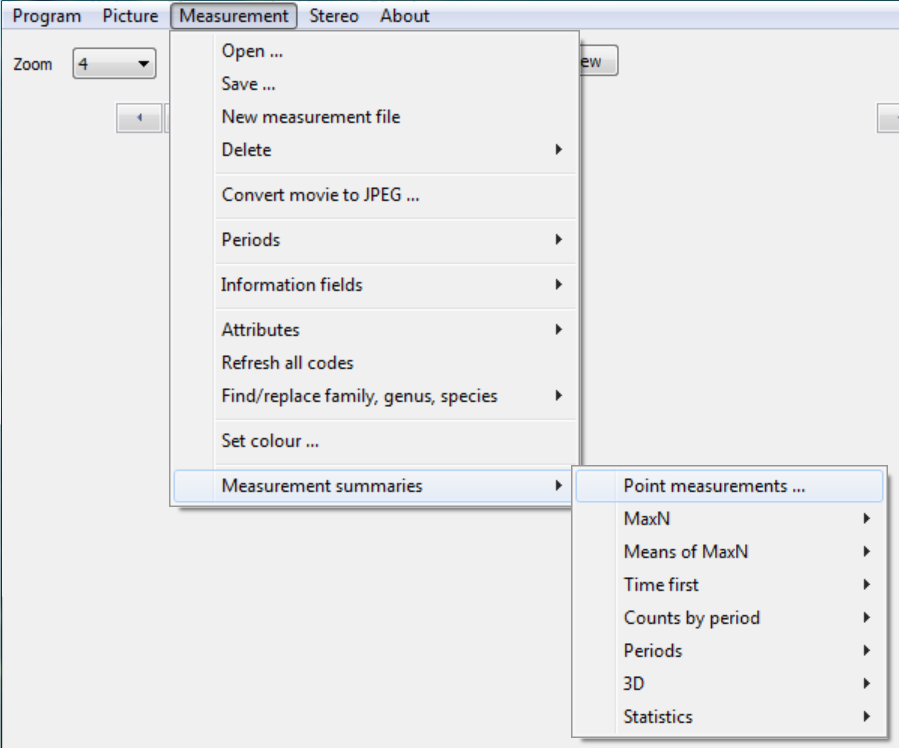
- 回転はすべてが列挙された後は、'測定' に移動して 2D ポイントをエクスポート > '測定概要' > '測定ポイント' と a.txt ファイルとして 2 D ポイントを保存します。
- スプレッドシートとして保存されている 2D.txt のポイント ファイルを開くし、「挿入」に移動してカウント (表 1) を要約する回転数対種のピボット テーブルを作成 > 'ピボット テーブル'.「列ラベル」「行ラベル」の「期間」「属と種」を選択します。
- (表 1) その種の個体数が一番多いのカメラの回転でそれぞれの種の MaxN を選択します。
- 属にだけ特定の魚、その特定の属の種に特定個人の最大数を持っていた回転に基づいて属レベル MaxN を選択します。
注: この手順より高い taxonomic グループ (例えば、属または家族にのみ) に個人がダブル カウント個々 の魚を避けるために役立ちます。たとえば、表 1で '回転 1' に対し 10 未確認メバル属と属メバル種識別の 33 人のメンバーに含まれている' 回転 3' が含まれている唯一の 2 つの正体不明メバル属の 43 メンバー属種にメバルが識別されます。したがって ' 不明なメバル属の MaxN カウントに使用される回転 3'このように、保守的な仮定が行われた正体不明のメバル属の 8 'で識別された回転 1'' 回転 8'。 - 複数の回転がある特定の種の同じ MaxN カウント、3 D 点の測定の MaxN の最初の回転を選択します。
- それぞれの種の MaxN が発生した回転で魚の 3 D 測定を取る。
- 2.1 2.3 の手順で収集保存された 2D の点を使って、3次元計測のための正確な同じ魚に移動します。
- 魚の鼻と尾側フィン (図 3) の端の先端を識別する少なくとも 4 X ズームします。
注: フレーム ステップ前方または後方 3次元計測のための魚の最適な向きを見つけるために必要になることがあります。鼻と尾側のフィンのエッジの両方が両方のカメラで目に見える 1 つは '最高' の方向も。 - 手動で左カメラで尻尾の端、鼻の先端をクリックし、右側のビデオで同じ順序で選択を繰り返します。
- 2.2.1 で終わったもののドロップ ダウン メニューから正しい種の同定を選択します。
- インスタンスの頭と魚の尾が両方のカメラで表示されない場合、マークの 3 D ポイント代わりに左と右の両方のビデオで魚の同じ位置を左クリックしてかどうか 3 D の長さの測定が不可能です。前に、として情報フィールドに入力し、「長さの測定から除外する」コメントを残します。
注: MaxN が異なる種のカメラの異なる回転で発生します。ただし、任意の種が、測定は、1 回転だけ (表 1) で発生する必要があります。
- すべての魚のための 3 D 測定を完了すると、さらに詳しい分析データ as.txt ファイルをエクスポートします。
- '測定' に移動 > '測定概要' > '3 D ポイントと長さ測定' と save.txt ファイルをエクスポートします。
3. 95 %z 距離種特異的な調査区域のための手順
注: 95 %z 距離は種は水の透明度や照明の例外的な条件の場合を除いて、特定の研究で確実に識別できる平均の距離の推定値です。この計算で特定の研究の平均の海洋環境を考慮した各の新しい研究を再計算する必要があります。
- 単純なブートス トラップを使用して、サンプル サイズがそれぞれの種に対して信頼性の高い検出距離を特徴付けるために十分に大きいことを確認します。
- (例えば、5 つの魚のサンプル サイズ箱)、それぞれのサンプル サイズのクラスを取るため 1,000 ランダム サンプル人口からの交換を選択されたサンプル サイズの描画しますこれらの 1,000 の距離の 95% の等量を描画します、平均を計算して結果をプロット近似曲線。補足ファイル 1 & 2で提供されたコードを参照してください。
- サンプル サイズを増やしてと 95 %z 距離の漸近線と実際のサンプル サイズを比較することによって十分なサンプルが得られることを確認します。
- カメラからの距離すべての調査の間で種の測定の 95% の等量として 95 %z の距離値を計算します。
- 95 %z 値を使用してそれぞれの種に対して調査有効面積を計算します。
注: 回転着陸の場合 95 %z 値を表す内側の半径で調査された帯状の外側半径ツールの物理的なセットアップによって決定され、どのようにカメラのベースに近い、観察することができます。着陸機が回転すると、'ドーナツ」状調査地が形成される (図 4)。- として調査対象領域を計算します。

注: たとえば、比較的大きな種の Yelloweye メバル (メバル ruberrimus) 95 %z 距離 3.3 m と着陸船配置あたり 30.9 m2の効果的な調査エリアを持っていたよう: 34.3 m2 (外周) - 3.4 m2 (内円) = 30.9 m2 (総調査区域)。
- として調査対象領域を計算します。
- 計算された面積を使用して (ステップ 3.3.1) 変換個々 の種数 (MaxN) 式を使用して各 visual 調査の密度推定を調査しました。

注: 同様の手順で使える密度; よりもむしろ容積密度を計算するにはしかし、そのプロセスはここでは説明しません。



表 1: 例 MaxN サマリー テーブル。それぞれの種の MaxN の選択は、赤と太字のテキストで示されています。正体不明のメバル属の保守的な MaxN はほとんどメバル(3 回転) の種に特定の回転によって決定されることに注意してください。また、本研究は、8 つのカメラ回転を使用、4 回転は、簡略化のため表 1に表示されます。MaxN を選択するためのプロセスは、回転数に関係なく同じです。

図 1: ステレオ ビデオ ランダー。主要なハードウェアは、防水ボトル内のリムーバブルの 32 GB ストレージ カードの番号(1) 300 m 臍、 (2)の 2 つのデジタル ビデオ レコーダー (DVR)、2 つ led を色温度 5,000 K ので出力 3,000 ルーメン(3) (4)620 TV ライン (TVL) 解像度をもつ 2 台のカメラ。この図の拡大版を表示するのにはここをクリックしてください。

図 2: 校正キューブ (500 × 500 × 300 mm)。2 つの異なる方向に示す '校正キューブ' と校正の例: (A)キューブの右側がカメラに向かって押し出さ、 (B)キューブの顔はカメラの面に平行。赤い点は、この特定の校正法で使用する参照ポイントを示すし、番号順に常に確認する必要があります。この図の拡大版を表示するのにはここをクリックしてください。

図 3: 3次元計測がメバルの miniatus上に配置します。鼻と尾の端の先端は、各カメラのフレームを可能にするステレオ計測で識別されました。この図の拡大版を表示するのにはここをクリックしてください。

図 4: ランダー ツールで調査地。Z 距離とそれぞれの種に対して 95 %z 距離最小に囲まれたランダー ツールで調査した効果的なエリアでした。注: この領域が着陸船のまわりの「ドーナツ」形調査容積を作成します。この図の拡大版を表示するのにはここをクリックしてください。
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
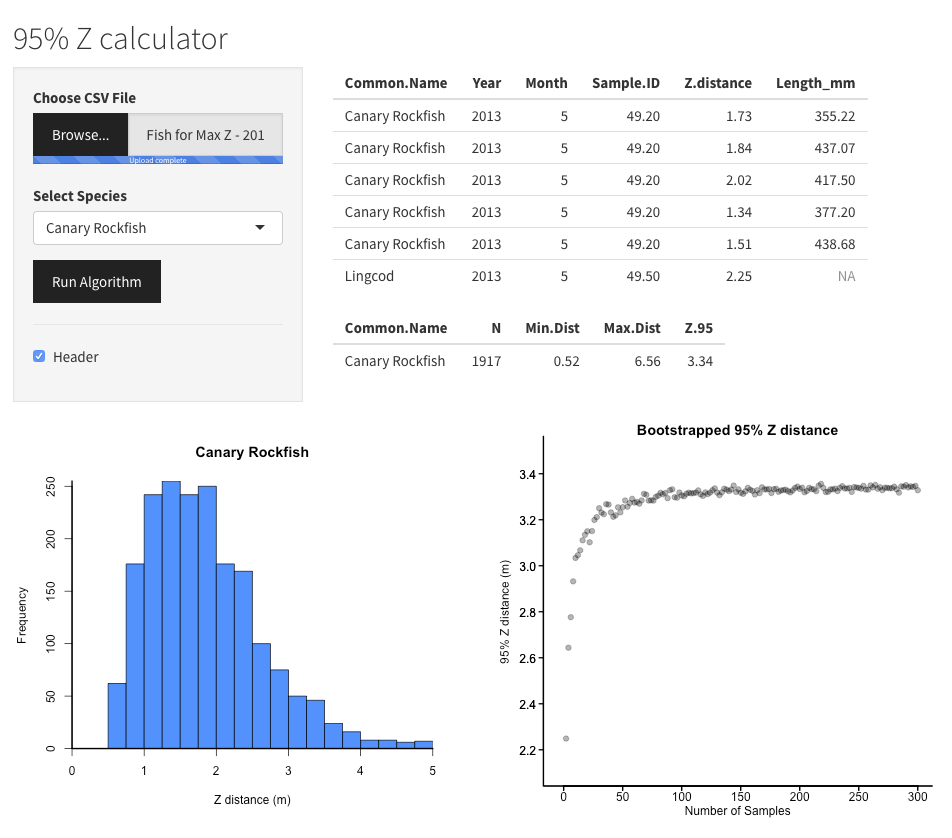
2013 から 2014 年の間の調査を 816 カリフォルニア中部の海岸と MaxN および 95% の収集の Z 距離 (図 4) ・ データよりも 20 種のステレオ ビデオの着陸機が回転 (図 1)。種のサイズ、形状、および着色 (図 5) の相互作用による可能性が高い、観察された種の効果的な検出範囲に明確なパターンがあった。たとえば、フラグ ロックフィッシュ (メバル rubrivinctus) 対等なサイズの他の種よりも大きい距離で自信を持って同定を可能にする側面の異なるバンディングしています。同様に、カナリア ロックフィッシュ (メバル pinniger) が比較的大きい、ボディしますが、他の種に似た色素沈着できるようになりより距離 (図 5) の特定は難しい。
2 種を使用して、MaxN や 95 %z 距離の値の計算を示す: ピグミー メバル (メバル wilsoni) とアイナメ (O. イネカメムシ)。前者は距離で識別することは困難することができます小さなボディの魚O. イネカメムシが比較的大きいに対し明確な形がありより容易に識別できます。2013-2014 年からs. wilsoniの 1,191 測定とo. イネカメムシ1,222 測定を集めました。その後、これらの種が観察された距離の 95%, 2: 95 %z 距離が 2.65 m o. イネカメムシ(図 5) 3.96 m とS の wilsoniを求めた。これらの 95 %z 距離はそれぞれs ・ wilsoniとo. イネカメムシ18.6 m2と 46.0 m2の効果的な調査エリアに変換します。単純なブートス トラップの分析は、サイズが 95 %z 距離値の特性の得られた十分なサンプルを確認しました。両方の種のこれらの種を含む 50 の調査よりも大きい場合を安定化 95 %z 距離の推定サンプリングされた、選択されたサンプル サイズがこれらの効果的なランダー サンプル領域の特性に十分すぎるほど強力な証拠を提供します。種 (図 6)。
MaxN 調査ごとの数、密度 (魚/m2の数) に変換されます。我々 はそのアイナメの仮説 816 調査から密度推定を使用し、ピグミー メバルは、高救済生息地に主に祝われるでしょう。両種の浮き彫りの生息地と比較して高中小の救済以上密度を大幅に高めるがあった (クラスカル-ウォリス、 p <<. 001;図 7)。これらの結果は、両方の種15以前に報告された生息地の関連付けは安定していた。媒体と高救済ハビタット ・ フォー ・どちらかの種の違いはありませんでした。
密度の違いを推定した回転のランダーが伝統的な固定カメラ システムと比較してどのように理解して回転とシミュレートされた静止した着陸の間変動を推定します。我々 は典型的な固定シングル カメラ ランダーが 90 度の視野を持っていると見なされます。回転のランダー 60 度の視野を持って 90 度ビューを完了する回転の 5 秒を必要とします。261 の調査を使用して、MaxN を確立するランダー回転の中間の 5 秒から魚観察データを選びました。ランダーは削減の対象範囲を使用して、標準化された擬似定常密度の見積もり (すなわち、約 ¼ 回転 Lander の領域)。回転と擬似固定ランダース間変動係数と平均密度の違いは、ウェルチの t 検定で評価しました。回転カメラによって得られた密度静止カメラで得られたより大きい 18% であったことを意味 (ウェルチの t21.7、 p = 0.081、図 8A)。さらに、変動係数はカメラを回転と比較して固定カメラで 1.8 倍 (ウェルチの t15.1、 p < 0.001、図 8)。

図 5: 選択種の Z 距離観測。赤の垂直バーは、左側と右側の 95 %z 距離値に最小の Z 距離 (カメラから 0.81 m) を示します。これはそれぞれの種のランダー周辺平均効果的な調査を表すことに注意してください。この図の拡大版を表示するのにはここをクリックしてください。

図 6: Z 距離値をブートス トラップします。S. wilsoni (A) と (B) O. イネカメムシ観察のサンプル サイズを大きくブートス トラップします。3 から 300 までのサンプル サイズが平均 95 %z 距離を計算し、サンプル サイズが十分なことを確認 1000 倍各ブートス トラップです。Y 軸の値の範囲はs. wilsoniの 2.0 2.6 m から 2.6 4.0 m 注O. イネカメムシ。この図の拡大版を表示するのにはここをクリックしてください。

図 7: 2 つの選択種のため生息地違い。S. wilsoni (A) と (B) O. イネカメムシの平均密度 (± SE) は、低、中、高救済岩の生息地で測定されます。この図の拡大版を表示するのにはここをクリックしてください。

図 8: 回転と擬似固定着陸船の相違点です。(A) の両方の見積もりは、密度 (魚/m2 ± SE) と (B) 261 の調査のための変化 (CV) ± SE の平均係数が表示されますを意味します。この図の拡大版を表示するのにはここをクリックしてください。

補助ビデオ 1: 校正検証します。校正は、様々 な距離で知られていたサイズの目標を測定することによって、フィールドで使用する前に検証できます。してくださいここをクリックしてこのビデオを表示します。(右クリックしてダウンロード)

補助ビデオ 2: 水中調査映像。してくださいここをクリックしてこのビデオを表示します。(右クリックしてダウンロード)
Subscription Required. Please recommend JoVE to your librarian.
Discussion
伝統的な MaxN メトリック個人の調査中に存在の保証の最小数を数えるという前提です。魚数が 1 つのビデオ フレームで同時に表示されている場合、すべてが少なく、現在、できませんが、1 つのビデオ フレームの中に同時にすべての個人を見て可能性が低い魚は不均一分散であるため.したがって、伝統的な MaxN が真魚豊富な16,17を過小評価する可能性が高いです。さらに、伝統的な MaxN が増加魚元素16,18と非線形負にバイアスされた関係を表示ことがありますが実証されています。これは、相対的な豊かさの指標が豊富な19,20では true を増加を検出に失敗するというギア飽和現象に関連する可能性があります。逆に、本当に少子化の魚の豊富なインデックスの見かけの安定性は、'hyperstability' と呼ばれているし、最終的に魚の人口21,22のクラッシュにつながる可能性があります。最近の研究は、調査対象の視野16を増やすことによって MaxN の不安定を緩和できることを報告しました。その研究で MaxN と真の豊かさとの関係は、視野 100% (すなわち、360 度) に近づくとますます線形なった。
固定カメラ シミュレーションの結果はこれらの以前の結果との一致を示すし、MaxN 値より豊富な魚を特徴づけることがお勧め。たとえば、分散の推定平均係数は擬似固定着陸船と比較して回転 Lander から派生した密度推定の間で減少しました。という魚は、不均一分散して、固定カメラが 'ミス' 現在の魚着陸間違った方向に直面している場合する可能性が高いために、これは可能性が高いです。回転ランダース、ツールの完全な 360 度の調査によってサンプリングの努力を最大化し、実質的な効果はサンプリング コストと差異と研究の統計的検出力の全体的な増加の両方を削減。今後の研究が直接対調査設計の別の静止したランダーと回転着陸をテストすることによってこの問題に対処。同様に、MaxN と本研究で真の豊かさとの間の関係を直接テストできませんでしたや将来の研究直接いずれかのシミュレーションを使用してこれをテストにキャンベル (2015)16で行われた環境を制御します。
変更された MaxN アプローチの可能な批評ダブル カウント個人の可能性であります。着陸した完全な 1 回転/分、生態系への関心の底生種は比較的定住とゆっくりほとんどの条件の下で動く傾向があるので、ダブル カウントの危険度は低いと考えています。また、魚が入力、または 8 回転のコース上の調査領域を残す症例であった。ダブルなど正体不明の種をカウントする特定の属の個体数が最大で回転を使用してカウントを避けるために追加の予防策が撮影されました。その他の指標は、魚量を意味する数などの指標として提案されています。しかし、これらはあまりにも、16を推定密度間の可変性を増加しながら、一貫して真の豊かさを過小評価する示されています。MaxN したがって魚量のより正確な指標として推奨します。この変更された MaxN 方法真魚量のより良い推定を提供します、そのオーバー カウント魚と確信しております全体的に私たちの変更された MaxN メトリックは個体数の絶対的な最小の保守的な見積もりを保証するものではない、間比較的低懸念。
多くの側視ビデオ トランセクト調査使用固定トランセクト全種の密度を推定する幅。同様に、ステレオ ビデオ ランダースを使用する 1 つの方法は、調査両方の面積を計算し、魚の密度 1 つ最大距離からカメラを使うことでしょう。両方は固定トランセクト幅推定23よりも小さい距離を確実に特定できるある種の過小評価につながる可能性があります。種を確実に識別する距離は、サイズ、形状、着色パターン、魚の行動だけでなく、環境因子などの要因の相互作用によって引き起こされます。95 %z 距離法は、これらすべての要因の相互作用のためにアカウントを同時に特に有利です。たとえば、 o. イネカメムシ我々 がその明確な大規模な細長い体型と海底に置く行動の傾向の結果として可能性があります、最大距離を識別することができる種であった。バラ色ロックフィッシュ (メバル rosaceus) は、最短の Z 距離、 Sebastomus亜属のメンバーとしてそれは非常に似て見えるの増加距離で区別が難しいいくつかの同族が、可能性の一つを持っていた。着陸船による調査対象種特異的領域のことで我々 は魚量をより正確に見積もることができるかもしれません。ブートス トラップ サンプル サイズ確認方法は簡単で、容易に実装された他の調査で、我々 は 95 %z 距離法をラインに合わせてさらに合わせることができると信じてトランセクト調査設計。95 %z 距離、水中や遠隔操作の車 (ROV) ツールで観察された種の確実な検出の水平方向の距離を表します。将来、研究者を距離23,24検出能の関数として距離サンプリング理論モデルの密度を使用して調べます。
非抽出サンプリングの手法で特に深層水生息地ダイバーにはアクセスできないため増加必要がある漁業管理25,26,27ことの無い準備のより大きい使用がある、調査。しかし、それもこれらの技術が魚の長さ、豊富なおよび種組成に正確で信頼性の高いデータを提供することが必要です。ビデオ ランダースは、低コスト、機会の比較的小型の船舶で操作することとが少なく、優秀な人材を必要としながらロジスティック ROVs や潜水艇よりも動作するように簡単な比較的新しい監視ツールです。一方、これらのメソッドでは説明しません、ステレオ カメラ ランダースは 2% 以下の誤差で正確な長さ測定が可能です。また、ランダース急速に展開できます広い地理的領域にわたって統計推論を増加します。ビデオ監視ツールとして予算を締め、サンプリング作業を効率化する研究機関外観を高めるために関心を見込んでいます。MaxN と 95 %z 距離の変更を加えるは、回転ビデオ ランダースを利用した将来の生態学的研究と見なす必要があります。
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
著者がある何も開示するには
Acknowledgments
この作品は、自然保護と民間のドナー、リソース遺産基金、ゴードンとベティ ・ ムーア財団、環境防衛基金、カリフォルニア州海グラント プログラム、NMFS 国立共同研究プログラムと、NOAA によって賄われていたケネディはグラント #13-SWR-008。海洋応用研究と探査 (Dirk ローゼン リック Botman、アンディ ・ Lauerman、デビッド ・ ジェフリーズ) 開発され、構築、ランダー ビデオツールを維持します。ジム シーガーと SeaGIS™ のソフトウェアのテクニカル サポートに感謝いたします。大尉および商業漁師ティム Maricich とクルー オンボード 2012-2015 からランダーを展開する F/Vドナ キャスリーン提供サポート。すべてのビデオのデータ収集または分析 (アン Tagini、ドナ · クライン、中尉アンバー ペイン、ブライオン ダウニー、魔理沙のポンテ、レベッカ ・ ミラー、マット メリフィールド、ウォルター Heady、スティーブ Rienecke、EJ ディック、ジョン ・ フィールド) に参加した人に感謝します。
Materials
| Name | Company | Catalog Number | Comments |
| calibration cube | SeaGIS | http://www.seagis.com.au/hardware.html | 1000x1000x500 mm is the preferred dimensions. Other methods of calibration are available. |
| CAL calibration software | SeaGIS | http://www.seagis.com.au/bundle.html | |
| EventMeasure stereo measurement software | SeaGIS | http://www.seagis.com.au/event.html | |
| Statistical software | R Core Team 2017 (v. 3.4.0) | Bootstrapping code can be found: https://github.com/rfields2017/JoVE-Bootstrap-Function | |
| Spreadsheet Software | Microsoft Excel | ||
| 2 waterproof cameras | Deep Sea Power and Light | HD quality preferred | |
| 2 depth rated, waterproof lights | Deep Sea Power and Light : 3000 lumen LED with 5000k color temperature | ||
| DVR recorder | Stack LTD DVR | ||
| standard PC | Windows 10 preferred OS | ||
| rotating Lander platform | Marine Applied Research and Engineering (MARE) |
References
- Love, M. S., Yoklavich, M. M., Thorsteinson, L. K. The Rockfishes of the Northeast Pacific. , University of California Press. Berkley. (2002).
- Laidig, T. E., Watters, D. L., Yoklavich, M. M. Demersal fish and habitat associations from visual surveys on the central California shelf. Estuar. Coast. Shelf Sci. 83 (4), 629-637 (2009).
- Anderson, T. J., Yoklavich, M. M. Multiscale habitat associations of deepwater demersal fishes off central California. Fish. Bull. 105 (2), 168-179 (2007).
- Yoklavich, M. M., Cailliet, G. M., Sullivan, D. E., Lea, R. N., Love, M. S. Habitat associations deep-water rockfishes a submarine canyon an example of a natural refuge. Fish. Bull. 98 (3), 625-641 (2000).
- Status of the Pacific Coast Groundfish Fishery, Stock Assessment and Fishery Evaluation. , Pacific Fishery Management Council. Portland, OR. (2016).
- Cappo, M., Harvey, E., Malcolm, H., Speare, P. Potential of video techniques to monitor diversity, abundance and size of fish in studies of marine protected areas. Aquatic protected areas- What works best and how do we know. Beumer, J. P., Grant, A., Smith, D. C. , Proc. World Congr. on Aquat Protected Areas. Australian Soc. for Fish Bio. North Beach, Western Australia. 455-464 (2003).
- McLean, D. L., Green, M., Harvey, E. S., Williams, A., Daley, R., Graham, K. J. Comparison of baited longlines and baited underwater cameras for assessing the composition of continental slope deepwater fish assemblages off southeast Australia. Deep-Sea Research Part I: Oceanographic Research Papers. 98, 10-20 (2015).
- Parker, D., Winker, H., et al. Insights from baited video sampling of temperate reef fishes: How biased are angling surveys. Fish. Res. 179, 191-201 (2016).
- Boutros, N., Shortis, M. R., Harvey, E. S. A comparison of calibration methods and system configurations of underwater stereo-video systems for applications in marine ecology. Limnol. Oceanogr. Methodss. 13 (5), 224-236 (2015).
- Harvey, E. S., Cappo, M., Butler, J. J., Hall, N., Kendrick, G. A. Bait attraction affects the performance of remote underwater video stations in assessment of demersal fish community structure. Mar. Ecol. Prog. Ser. 350, 245-254 (2007).
- Watson, J. L., Huntington, B. E. Assessing the performance of a cost-effective video lander for estimating relative abundance and diversity of nearshore fish assemblages. J. Exp. Mar. Bio. Ecol. 483, 104-111 (2016).
- Easton, R. R., Heppell, S. S., Hannah, R. W. Quantification of Habitat and Community Relationships among Nearshore Temperate Fishes Through Analysis of Drop Camera Video. Mar. Coast. Fish. 7 (1), 87-102 (2015).
- Hannah, R. W., Blume, M. T. O. Tests of an experimental unbaited video lander as a marine fish survey tool for high-relief deepwater rocky reefs. J. Exp. Mar. Bio. Ecol. 430, 1-9 (2012).
- Starr, R. M., Gleason, M. G., et al. Targeting Abundant Fish Stocks while Avoiding Overfished Species: Video and Fishing Surveys to Inform Management after Long-Term Fishery Closures. Plos One. 11 (12), 0168645 (2016).
- Love, M. S. Certainly more than you want to know about the fishes of the Pacific Coast: a postmodern experience. , Really Big Press. Santa Barbara, CA. (2011).
- Campbell, M. D., Pollack, A. G., Gledhill, C. T., Switzer, T. S., DeVries, D. A. Comparison of relative abundance indices calculated from two methods of generating video count data. Fish. Res. 170, 125-133 (2015).
- Cappo, M., Speare, P., De'ath, G. Comparison of baited remote underwater video stations (BRUVS) and prawn (shrimp) trawls for assessments of fish biodiversity in inter-reefal areas of the Great Barrier Reef Marine Park. J. Exp. Mar. Bio. Ecol. 302 (2), 123-152 (2004).
- Schobernd, Z. H., Bacheler, N. M., Conn, P. B., Trenkel, V. Examining the utility of alternative video monitoring metrics for indexing reef fish abundance. Can. Jour. Fish. Aquat. Sci. 71 (3), 464-471 (2014).
- Hansen, M. J., Schorfhaar, R. G., Selgeby, J. H. Gill-Net Saturation by Lake Trout in Michigan Waters of Lake Superior. North Am. J. Fish. Manag. 18 (4), 847-853 (1998).
- Dauk, P. C., Schwarz, C. J. Catch estimation in the presence of declining catch rate due to gear saturation. Biometrics. 57 (1), 287-293 (2001).
- Hilborn, R., Walters, C. J. Quantitative Fisheries Stock Assessment Choice, Dynamics and uncertainty. , Springer. Dordrecht. (1992).
- Erisman, B. E., Allen, L. G., Claisse, J. T., Pondella, D. J., Miller, E. F., Murray, J. H. The illusion of plenty: hyperstability masks collapses in two recreational fisheries that target fish spawning aggregations. Can. Jour. Fish. Aquat. Sci. 68, 1705-1716 (2011).
- Buckland, S. T., Anderson, D. R., Burnham, K. P., Laake, J. L. Distance Sampling: Estimating abundance of biological populations. , Chapman and Hill. London. (1993).
- Ronconi, R. A., Burger, A. E. Estimating seabird densities from vessel transects: Distance sampling and implications for strip transects. Aquat. Bio. 4 (3), 297-309 (2008).
- Caselle, J. E., Rassweiler, A., Hamilton, S. L., Warner, R. R. Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected areas Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected. Nat. Publ. Gr. , 1-14 (2015).
- Starr, R. M., Wendt, D. E., et al. Variation in Responses of Fishes across Multiple Reserves within a Network of Marine Protected Areas in Temperate Waters. Plos One. 10 (3), 0118502 (2015).
- Lester, S., Halpern, B., et al. Biological effects within no-take marine reserves: a global synthesis. Mar. Ecol. Prog. Ser. 384, 33-46 (2009).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}