Most animals have the ability to move in a highly sophisticated and controlled manner. To decipher the genetic basis underlying locomotion control it is mandatory to quantitatively assess different behavioral patterns. In this respect, Drosophila can serve as an ideal model. Tracking of freely flying Drosophila is tantalizing 1-4 but crawling of Drosophila larvae occurs in two dimensions at relatively low speed and can thus be monitored easily. Camera-based setups combined with appropriate illumination are used to acquire images 5. Both incident or transmitted light is employed in behavioral experiments 6,7. However, due to the semi-translucent body of the larvae and possible light reflections of the crawling surface faithful recording of larval movements can be challenging. To overcome such problems, some complex methods have been devised. Recently, dark field illumination was introduced to enhance the foreground/background contrast 8. As an alternative to camera-based recording, lens-less optical imaging and image-sensor-less on-chip acquisition techniques have been introduced 9-11.
Several tracking programs have been introduced recently, including commercially available software 12 and custom solutions. Examples for high-throughput tracking programs are the Multi Worm Tracker (MWT) 13 and Multianimal Gait And Track (MAGAT) 8. Both have in common, that multiple animals can be tracked in a single open-field arena so that colliding animals lead to multiple new animal identities. To overcome this limitation, a multi-well setup was introduced separating 12 animals into individual wells 14. Precise quantification of locomotion of single individuals can be achieved by using a movable tracking stage in combination with a microscope 15. However, all these approaches are either cost inefficient, lack sufficient resolution or too time consuming for high throughput phenotyping.
To overcome the above mentioned limitations, we have developed FIM (FTIR-based Imaging Method) based on Frustrated Total Internal Reflection (FTIR) 16 (Figure 1). This new imaging approach provides an unprecedented high contrast and even allows multi-color recording of crawling animals 16. The underlying principle of this handy and effective method is easy. An acrylic glass plate is flooded with light (e.g., 875 nm infrared). Due to different refractive indices of acrylic glass and air, the light is totally reflected at the glass/air boundary. No heating of the acrylic glass is noted 16. Only if objects with a higher refractive index touch the light-flooded table, can light enter these objects. If the animals touch the surface, light is reflected and can be captured from below (Figure 1). In consequence, only the contact area of the animals appears as a bright spot, which allows detailed imaging with an overall black background. Thus, FIM-imaging allows to record perfect movies for computer vision algorithms. The simple and robust use of FIM now brings detailed high throughput analysis of complex animal behavior into reach and can be used for studying information processing: e.g., olfaction 8, 16; vision 17 or thermosensation 18.
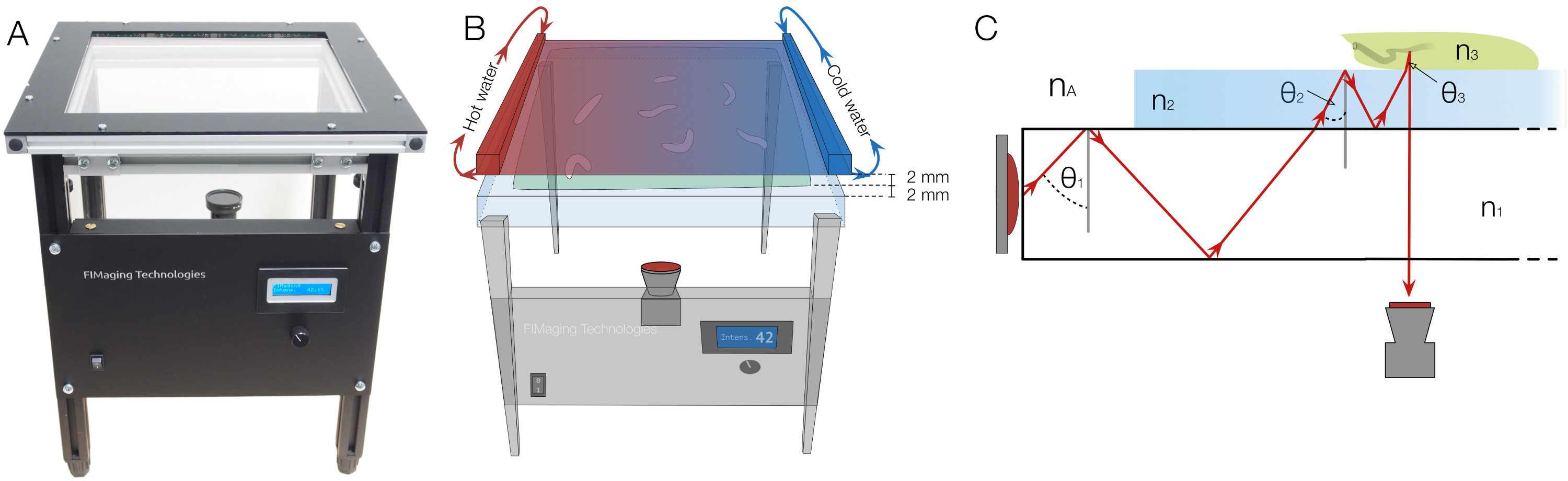
Figure 1. FIM setup with heat-stimulus integration and underlying physical principles. (A) The FIM setup. Illumination intensity can be regulated at front panel. (B) To deliver a heat stimulus, a black painted aluminum plate, perfused with hot and cold water at both sides, is placed 2 mm above the agar surface which itself is 2 mm thick. The gradient is established on the heat radiator plate and the agar by the temperature differences. (C) The physical principle of frustrated total internal reflection: An acrylic glass plate is illuminated by infrared light. θ1, θ2, and θ3 indicate the light reflection angles. nA, n1, n2 and n3 denote the refractive indices of air, acrylic glass, agar and the larva respectively and fulfill the inequality nA <n1 <n2 <n3. Due to refraction, the reflection angle changes during transition. If the angle is below the critical angle, light is not reflected anymore, can pass through the layers and can be captured from below. Please click here to view a larger version of this figure.
The spectrum of processes that can be analyzed by FIM is broad. Without any further adjustments, FIM imaging can be used to monitor all larval stages of Drosophila (Figure 5B) or can be used to follow the foot-prints of adult Drosophila 19. Likewise, the trajectories of C. elegans or the movement of planarian flatworms can be easily recorded (Figure 5C). Even the analysis of fungal hypha or root hair growth appears feasible 19. In our current FIM setup, 4 x 16 infrared light emitting diodes (IR- LEDs) are integrated into a 32 x 32 cm2 acrylic glass plate, called the tracking table (Figure 1). The intensity of the IR-LEDs is adjusted depending on the weight of the objects on the tracking table, which can be easily done by a micro controller connected to the circuit via pulse-width modulation (PWM). FIM yields very high contrast images over a broad range of illumination intensities. Importantly, it generates excellent results at already low overall infrared irridation.
A camera with an infrared filter is placed below the tracking table, which allows integration of additional stimuli into the setup. Heat stimuli can be easily applied by a heat radiator plate and light stimuli are applied by an LCD projector. Also odorants can be contained in gradients by simple lids 8. For heat gradient experiments, the heat radiator plate is perfused with hot and cold water on both sides respectively and placed 2 mm above the larvae (Figure 1B).
The generation of high contrast, high quality movies opens the possibility for sophisticated computer based image analysis, thus we implemented the FIMTrack software to extract a large set of features from images (Figure 2). First six primary features were defined from the contour of the animal (Figure 3A). These features provide the baseline for further calculation of six secondary features which describe the animals shape and its position at certain stimuli at a given time point (Figure 3B). Currently, nine tertiary features are calculated that are integrating temporal aspects and thus characterize the locomotion of the animal together with the primary and secondary features (Figure 3C).
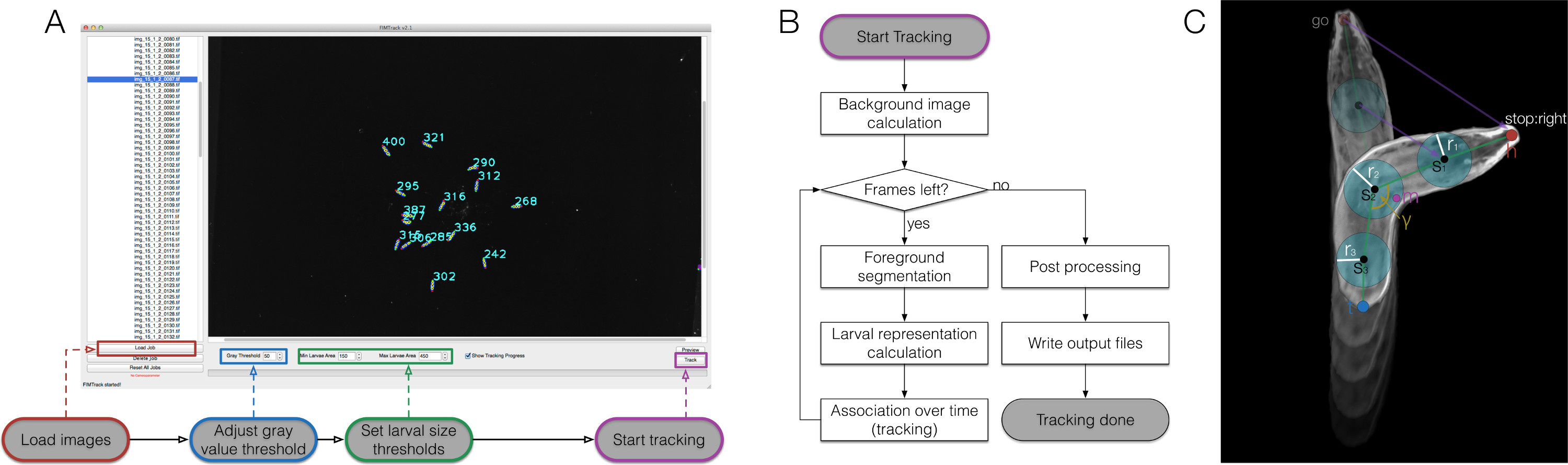
Figure 2. FIMTrack overview, algorithmic workflow and larval representation. (A) How to use FIMTrack. The images are loaded. Gray value threshold and larval size thresholds defining single larvae must be set. The larval area must be in [min-size, max-size]. Tracking is started by the highlighted button. (B) Tracking workflow. After the start button is clicked, the background image is calculated (minimal intensities over time). As long as there are frames left, the larvae are segmented based on the gray threshold and the min- and max-size threshold. For all segmentations the larval representations are calculated (compare to (C)). Each new model is associated to a given trajectory if a valid track is available. If the last frame is reached, finalizing post processing is done followed by the output generation. (C) Larval representation. The animal consists of a head and a tail point (h and t). Between these points an arbitrary odd number of spine points si can be set with a radius ri. In addition, the center of mass m and the main body bending angle γ are calculated. Several motion related parameters are sketched by purple lines. Please click here to view a larger version of this figure.

Figure 3. Features calculated by FIMTrack. (A) Primary features based on the contour of the animals. (B) Secondary features, based on primary features. (C) Tertiary features, based on primary features in consecutive frames and additional inputs Please click here to view a larger version of this figure.
For imaging several different cameras with different resolution properties were tested (Figure 4). All cameras where equipped with an appropriate IR filter. According to the low resolution of the lowest priced camera in this test, the field of view is limited to 10 cm x 10 cm. Best results were obtained using a 4 megapixel (MP) camera. This leads to a resolution of 100 pixels per third instar larval length and allowed to easily recognize internal structures. Additionally, the peristalsis of the animal can be easily extracted (Figure 4A). However, one can still obtain high contrast movies using less expensive cameras, which can also be analyzed by FIMTrack. Using a 1.4 MP camera with a depth of 8 bit and a resolution of 1,392 x 1,040 pixels is about half the price and allows a resolution of 45 pixels per third instar larval length in the field of view. The head but no other internal structures can be recognized (Figure 4B). Tracking and detection of peristalsis is possible but accuracy is reduced (Figure 4B).
With an even cheaper 0.8 MP camera with a spatial resolution comparable to the 1.4 MP camera, the larval head cannot be recognized faithfully anymore (Figure 4C). Tracking and peristalsis analysis is possible but including more jitter based on the increased noise. Surprisingly, even a low resolution USB webcam provides sufficient quality movies to calculate larval trajectories (0.3 MP camera, below 20€, Figure 4D). The peristalsis can be calculated from the area but measurements are very noisy.
In our setup we routinely use the 4 MP camera. For screening, this camera allows monitoring a 22 cm x 22 cm arena, which obviously provides the opportunity to analyze large numbers of animals simultaneously so that high throughput analysis is feasible. Using this setting, larval length is represented by 40 pixels which still allows recording and analysis of peristalsis. An exemplary image of 15 larval trajectories in a heat gradient is given in Figure 5A. In addition, the use of a macro lens allows to image larvae with very high resolution where many internal organs become visible and head recognition is further improved (Figure 5B). Moreover these can be used for further more detailed analysis of behaviors of a wide range20. The same setup can be easily used to image crawling C. elegans worms (Figure 5C).

Figure 4. FIM imaging and tracking results for different cameras. (A) Left: FIM imaging of three larvae crawling on a 10 cm x 10 cm tracking stage captured using a 4 MP camera with 10 fps. Mid: Clipping and center of mass trajectory of a single larva. The area of the animal is indicated. Right: Area of the larva plotted over 100 frames. The red arrow indicates the time point of the clipped image. (B) Equivalent to (A) but captured using a 1.4 MP camera. (C) Equivalent to (A) but captured using a 0.8 MP camera. (D) Equivalent to (A) but captured using a 0.3 MP camera. Please click here to view a larger version of this figure.

Figure 5. Heat stimulus, and high resolution applications. (A) Heat stimulus application (compare to Figure 1). Trajectories calculated via FIMTrack. (B) High resolution application image of a third, second and first instar larva using a macro lens. The third instar larval length is represented by 400 pixels in a field of view of 2.5 x 2.5 cm. (C) A C. elegans worm captured using FIM imaging. Scale bars are indicated. Please click here to view a larger version of this figure.
