Die meisten Tiere besitzen die Fähigkeit, in einem hochentwickelten und kontrollierte Weise zu bewegen. Um die genetischen Grundlagen zugrunde liegenden Bewegungssteuerung zu entschlüsseln ist es zwingend notwendig die quantitative Erfassung unterschiedlicher Verhaltensmuster. In dieser Hinsicht kann Drosophila als ideales Vorbild dienen. Tracking der frei fliegenden Drosophila tantalizing 1-4 aber kriecht von Drosophila-Larven erfolgt in zwei Dimensionen bei relativ niedriger Geschwindigkeit und kann somit leicht kontrolliert werden. Kamerabasierte Setups in Kombination mit geeigneten Beleuchtung verwendet werden, um Bilder zu 5 zu erwerben. Sowohl Auf- oder Durchlicht wird in Verhaltensexperimenten 6,7 eingesetzt. Allerdings kann aufgrund der semi-transluzente Körper der Larven und mögliche Lichtreflexionen des kriechenden Oberfläche treue Aufzeichnung von Larven Bewegungen schwierig sein. Um diese Probleme zu überwinden, haben einige komplexe Methoden entwickelt worden. Vor kurzem wurde der Dunkelfeldbeleuchtung eingeführt, um die Vorder- / Hintergrund cont verbessernrast 8. Als Alternative zum kamerabasierten Aufzeichnungslinsen weniger optischen Bildgebung und bildsensorlosen chipAkquisitionsTechniken eingeführt worden 9-11.
Mehrere Tracking-Programme haben vor kurzem eingeführt, darunter handelsübliche Software 12 und kundenspezifische Lösungen. Beispiele für die Hochdurchsatz-Tracking-Programme sind die Multi Worm Tracker (MWT) 13 und Multianimal Gang und Track (Magát) 8. Beide haben gemeinsam, dass mehrere Tiere in einem einzigen Freiflächen-Arena verfolgt werden, so dass kollidierende Tieren führen, mehrere neue Tier Identitäten. Um diese Einschränkung zu überwinden, wurde eine Multi-Well-Aufbau eingeführt Trenn 12 Tiere in einzelne Vertiefungen 14. Präzise Quantifizierung der Fortbewegung von einzelnen Personen können durch die Verwendung eines beweglichen Verfolgungsstufe in Kombination mit einem Mikroskop 15 erreicht werden. Jedoch sind alle diese Ansätze entweder Kosten ineffizient, keine ausreichende WiederLösung oder zu zeitaufwendig für die Hochdurchsatz-Phänotypisierung.
Um die oben genannten Beschränkungen zu überwinden, die wir entwickelt haben FIM (FTIR-basierten Imaging-Verfahren), basierend auf frustrierte Totalreflexion (FTIR) 16 (Abbildung 1). Diese neuen bildgebenden Ansatz bietet einen beispiellosen hohen Kontrast und erlaubt sogar Mehrfarbaufzeichnung der kriechenden Tiere 16. Das zugrunde liegende Prinzip dieses handliche und effektive Methode ist einfach. Eine Acrylglasplatte ist lichtdurchflutet (zB 875 nm Infrarot). Wegen der unterschiedlichen Brechungsindices von Acrylglas und Luft, wird das Licht vollständig an der Glas / Luft-Grenze reflektiert wird. Keine Erwärmung der Acrylglas wird bemerkt 16. Nur dann, wenn Objekte mit einem höheren Brechungsindex berühren Sie die lichtdurchfluteten Tabelle können leuchten geben diese Objekte. Wenn die Tiere die Oberfläche berühren, wird das Licht reflektiert und von unten (Figur 1) erfasst werden. Folglich wird nur der KontaktBereich der Tiere erscheint als heller Fleck, der detaillierte Bildgebung mit einer Gesamt schwarzem Hintergrund ermöglicht. So erlaubt FIM-Bildgebung, um perfekte filme für Computer Vision Algorithmen erfassen. Die einfache und robuste Anwendung von FIM bringt nun detaillierte Hochdurchsatzanalyse von komplexen Verhalten der Tiere in Reichweite und kann für das Studium der Informationsverarbeitung eingesetzt werden: zB Geruchssinn 8, 16; Vision 17 oder thermosensation 18.
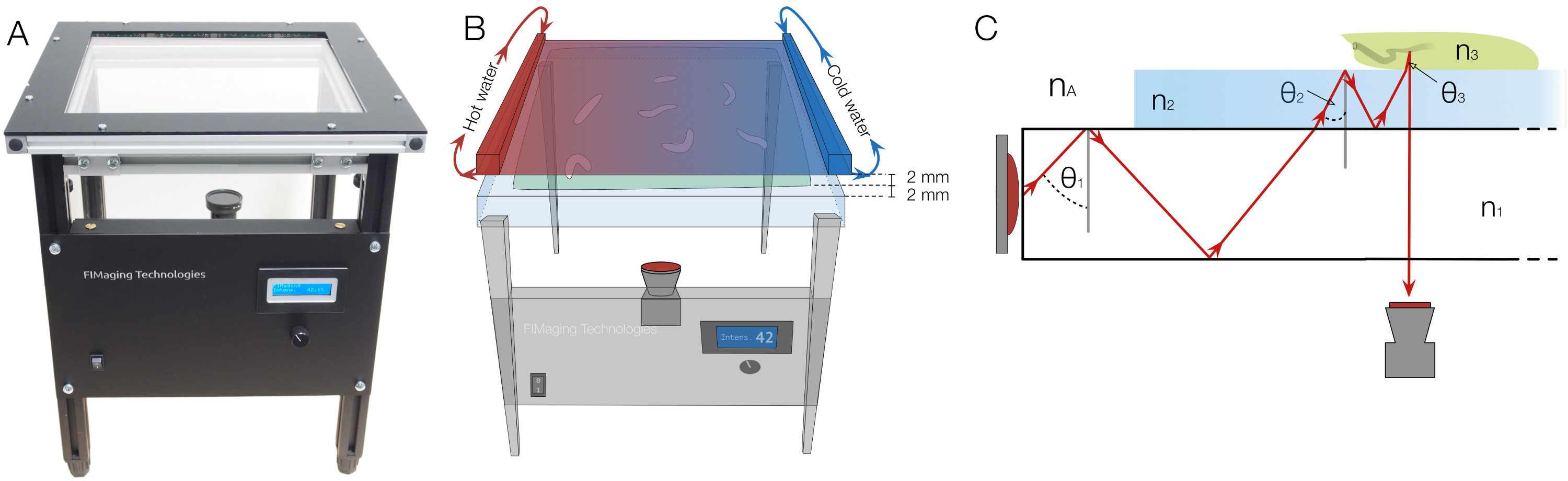
Abbildung 1. FIM-Setup mit Hitzereiz Integration und die zugrunde liegenden physikalischen Prinzipien. (A) Die FIM-Setup. Beleuchtungsstärke können am vorderen Bedienfeld geregelt werden. (B) Um einen Hitzereiz liefern, malte eine schwarze Aluminium-Platte, mit heißem und kaltem Wasser durchströmt auf beiden Seiten wird 2 mm über der Agar-Oberfläche platziert dieselbst ist 2 mm dick. Die Steigung ist auf dem Wärmestrahler Platte und der Agar durch die Temperaturunterschiede festgestellt (C) Das physikalische Prinzip der gestörten Totalreflexion:. Eine Acrylglasplatte wird mit Infrarotlicht beleuchtet. θ 1, θ 2 und θ 3 die Lichtreflexionswinkel. n A, n 1, n 2 und n 3 bezeichnen die Brechungsindizes von Luft, Acrylglas, Agar und Larven jeweils und erfüllen die Ungleichung n A <n 1 <n 2 <n 3. Aufgrund der Brechung ändert beim Übergang der Reflexionswinkel. Wenn der Winkel unterhalb des kritischen Winkels ist, wird das Licht nicht mehr reflektiert, können durch die Schichten hindurchtreten und von unten erfasst werden. Bitte klicken Sie hier, um eine größere Version dieses Bild anzuzeigen.
Die spectrum von Prozessen, die von der FIM analysiert werden können, ist breit. Ohne weitere Einstellungen können FIM Bildgebung verwendet werden, um alle Larvenstadien von Drosophila (5B) zu überwachen oder kann verwendet werden, um die Fußspuren der Erwachsenen folgen Drosophila 19. Ebenso sind die Trajektorien C. elegans oder die Bewegung der Planarie Plattwürmer leicht aufgenommen werden (5C). Auch die Analyse der Pilzhyphen oder Wurzelhaarwachstum möglich erscheint 19. In unserem aktuellen FIM Setup werden 4 x 16 Infrarot-Leuchtdioden (IR-LEDs) in eine 32 x 32 cm 2 Acrylglasplatte integriert, die so genannte Tracking-Tabelle (Abbildung 1). Die Intensität der IR-LEDs wird abhängig von dem Gewicht der Gegenstände auf dem Verfolgungstabelle, die leicht von einem Mikroregler mit der Schaltung über eine Pulsweitenmodulation (PWM) verbunden erfolgen kann eingestellt. FIM ergibt sehr kontrastreiche Bilder über einen weiten Bereich von Beleuchtungsstärken. Wichtiger ist, es genriert hervorragende Ergebnisse bei insgesamt bereits niedrigen Infrarot irridation.
Eine Kamera mit einem Infrarot-Filter ist unterhalb der Verfolgungstabelle, die die Integration von zusätzlichen Impulse in das Setup ermöglicht platziert. Wärmereize kann durch einen Wärmestrahlerplatte aufgebracht werden und Lichtreize werden durch ein LCD-Projektor verwendet. Auch Duftstoffe können in Gradienten mit einfachen Deckeln 8 enthalten sein. Für Wärmegradienten Experimenten wurde die Wärmestrahlerplatte wird mit warmem und kaltem Wasser auf beiden Seiten jeweils perfundiert und platziert 2 mm oberhalb der Larven (1B).
Die Erzeugung von hochauflösenden, qualitativ hochwertige Filme eröffnet die Möglichkeit für anspruchsvolle computergestützte Bildanalyse, damit wir die FIMTrack Software implementiert, um eine große Palette an Funktionen aus Bildern zu extrahieren (Abbildung 2). Ersten sechs Primärmerkmale wurden aus der Kontur des Tieres (3A) definiert ist. Diese Funktionen bieten die Grundliniezur weiteren Berechnung der sechs Sekundärmerkmale, die die Tiere Form und seine Position auf bestimmte Reize zu einem gegebenen Zeitpunkt (Figur 3B), beschreiben. Derzeit sind neun tertiären Merkmale berechnet, die Integration sind zeitliche Aspekte und so prägen die Fortbewegung der Tiere zusammen mit den primären und sekundären Funktionen (3C).
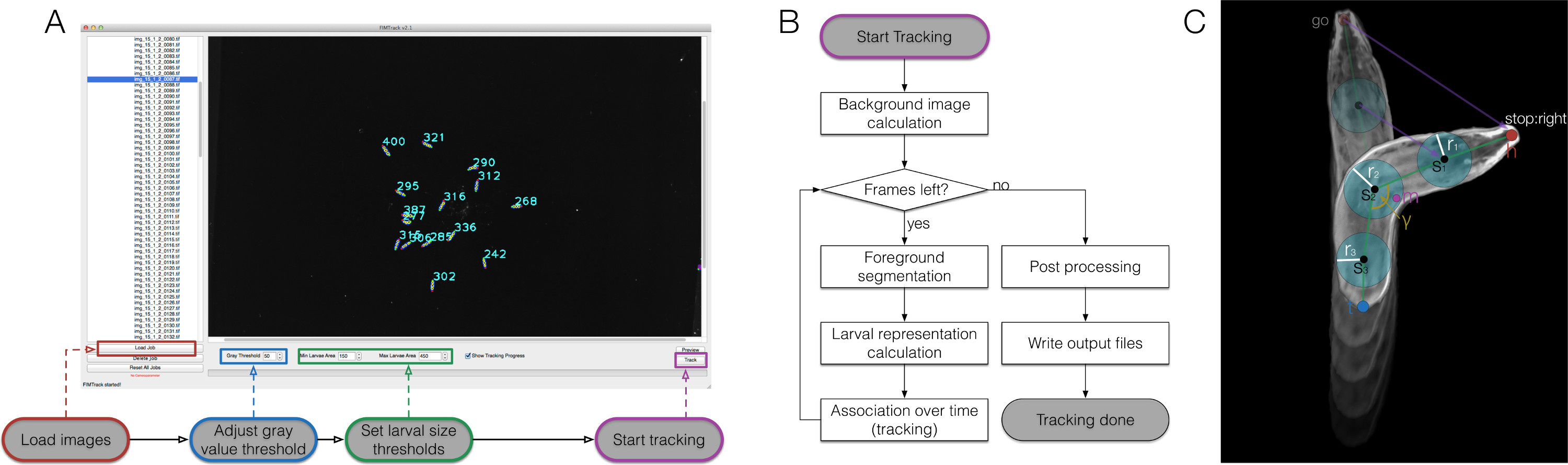
Abbildung 2. FIMTrack Übersicht, algorithmische Workflow und Larven Darstellung. (A) Wie FIMTrack verwenden. Die Bilder werden geladen. Grauwertschwelle und Larvengrößenschwellen zu definieren einzelne Larven müssen eingestellt werden. Die Larvenbereich muss in [min-Größe, max-size] sein. Tracking wird durch die hervorgehobene Schaltfläche (B) Tracking-Workflow gestartet.. Nachdem der Start-Taste angeklickt wird, wird das Hintergrundbild calculated (minimale Intensität über die Zeit). Solange gibt es Rahmen links werden die Larven auf der Grundlage der Grauschwelle und die Min- und Max-Größenschwelle segmentiert. Für alle Segmentierungen die Larvendarstellungen berechnet werden (im Vergleich zu (C)). Jedes neue Modell ist mit einer gegebenen Flugbahn verbunden, wenn eine gültige Strecke verfügbar ist. Wenn das letzte Bild erreicht ist, wird in Kürze Nachbearbeitung fertig durch die Ausgabe Generation gefolgt. (C) Larven Darstellung. Das Tier aus einem Kopf und einem Schwanz Punkt (h und t). Zwischen diesen Punkten eine beliebige ungerade Anzahl an Rückgrat Punkte s kann ich mit einem Radius r i eingestellt werden. Darüber hinaus ist die Mitte der Masse m und der Hauptkörper Biegewinkel γ berechnet. Mehrere Bewegung relevante Parameter sind durch violette Linien skizziert. Bitte klicken Sie hier, um eine größere Version dieses Bild anzuzeigen.

Abbildung 3. Merkmale von FIMTrack berechnet. (A) Die wichtigsten Merkmale auf der Grundlage der Kontur der Tiere. (B) Sekundäre Funktionen, basierend auf dem primären Funktionen. (C) Tertiäre Funktionen, basierend auf dem primären Funktionen in aufeinanderfolgenden Rahmen und zusätzliche Eingänge Bitte klicken Sie hier, um eine größere Version davon zu sehen Figur.
