La mayoría de los animales tienen la capacidad de moverse de una manera altamente sofisticada y controlada. Para descifrar la base genética de control de la locomoción subyacente es obligatorio para evaluar cuantitativamente diferentes patrones de comportamiento. A este respecto, Drosophila puede servir como un modelo ideal. Seguimiento de volar libremente Drosophila es tentador 1-4 pero el rastreo de las larvas de Drosophila se produce en dos dimensiones a una velocidad relativamente baja y por lo tanto se puede controlar fácilmente. Montajes basados en cámaras combinadas con adecuada iluminación se utilizan para adquirir imágenes 5. Tanto incidente o luz transmitida se emplea en experimentos de comportamiento 6,7. Sin embargo, debido a que el cuerpo semi-transparente de las larvas y los posibles reflejos de luz de la superficie que se arrastra fiel registro de los movimientos de las larvas puede ser un reto. Para superar estos problemas, algunos métodos complejos se han ideado. Recientemente, iluminación de campo oscuro se introdujo para mejorar el primer plano / fondo contRAST 8. Como alternativa a la grabación basada en la cámara, la imagen óptica de lentes menos y del sensor de imagen-en-chip menos se han introducido técnicas de adquisición de 9-11.
Varios programas de seguimiento se han introducido recientemente, incluyendo el software de 12 y personalizadas soluciones disponibles en el mercado. Ejemplos de programas de rastreo de alto rendimiento son el Rastreador Gusano Multi (MWT) 13 y Multianimal marcha y Track (MAGAT) 8. Ambos tienen en común, que muchos animales pueden ser rastreados en un solo escenario de campo abierto para que los animales que chocan conducen a múltiples nuevas identidades animales. Para superar esta limitación, una configuración de múltiples pocillos se introdujo la separación de 12 animales en pocillos individuales 14. La cuantificación precisa de la locomoción de las personas individuales se puede lograr mediante el uso de una etapa de seguimiento móvil en combinación con un microscopio 15. Sin embargo, todos estos enfoques son o poco rentables, la falta suficiente resolución o demasiado tiempo para alta fenotipificación rendimiento.
FIM Para superar las limitaciones mencionadas anteriormente, hemos desarrollado (método de imagen basada en FTIR), basado en Frustrado Reflexión Interna Total (FTIR) 16 (Figura 1). Este nuevo enfoque de imagen proporciona un alto contraste sin precedentes e incluso permite la grabación de varios colores de animales rastreros 16. El principio subyacente de este método práctico y eficaz es fácil. Una placa de vidrio acrílico se inunda de luz (por ejemplo, 875 nm infrarrojo). Debido a los diferentes índices de refracción de vidrio acrílico y el aire, la luz se refleja totalmente en el límite vidrio / aire. No hay calefacción del vidrio acrílico se observó 16. Sólo si los objetos con un índice de refracción más alto toquen la mesa luminosa, puede iluminar introducir estos objetos. Si los animales tocan la superficie, la luz se refleja y se puede capturar desde abajo (Figura 1). En consecuencia, sólo el contactoárea de los animales aparece como un punto brillante, que permite imágenes detalladas con un fondo negro en general. Por lo tanto, la FIM-imagen permite grabar películas perfectas para los algoritmos de visión por computador. El uso simple y robusto de FIM ahora trae un análisis detallado del comportamiento animal complejo de alto rendimiento en alcance y se puede utilizar para el estudio de tratamiento de la información: por ejemplo, el olfato 8, 16; visión 17 o thermosensation 18.
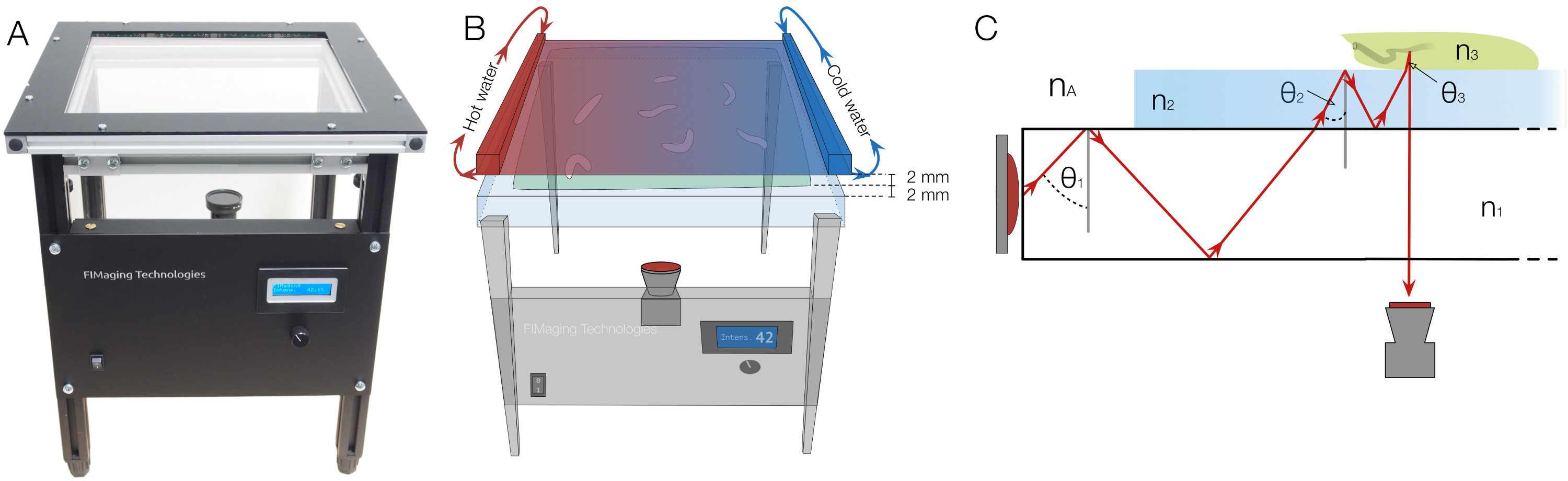
Figura 1. Configuración FIM con la integración de calor-estímulo y los principios físicos subyacentes. (A) La configuración de FIM. Intensidad de iluminación se puede regular en el panel frontal. (B) Para entregar un estímulo de calor, un negro pintado placa de aluminio, perfundido con agua fría y caliente en ambos lados, se coloca 2 mm por encima de la superficie del agar quesí es de 2 mm de espesor. El gradiente se establece en la placa del radiador de calor y el agar por las diferencias de temperatura (C) El principio físico de la frustrada reflexión interna total:. Una placa de vidrio acrílico es iluminado por la luz infrarroja. θ 1, θ 2, y θ 3 indican los ángulos de reflexión de luz. n A, n 1, n 2 yn 3 denotan los índices de refracción del aire, vidrio acrílico, agar y la larva, respectivamente, y cumplir con la desigualdad n A <n 1 <n 2 <n 3. Debido a la refracción, el ángulo de reflexión cambia durante la transición. Si el ángulo está por debajo del ángulo crítico, la luz no se refleja más, puede pasar a través de las capas y pueden ser capturados desde abajo. Por favor, haga clic aquí para ver una versión más grande de esta figura.
El spectrum de los procesos que pueden ser analizados por la FIM es amplio. Sin ningún otro ajuste, la imagen de la FIM se puede utilizar para controlar todas las fases larvarias de Drosophila (Figura 5B) o se puede utilizar para seguir las pisadas de adultos Drosophila 19. Del mismo modo, las trayectorias de C. elegans o el movimiento de los gusanos planos planarias se pueden grabar fácilmente (Figura 5C). Incluso el análisis de hifas o el pelo de raíz el crecimiento de hongos parece factible 19. En nuestra configuración actual FIM, 4 x 16 diodos emisores de luz infrarroja (LED) IR- están integrados en una placa de vidrio 2 cm acrílico 32 x 32, llamada la tabla de seguimiento (Figura 1). La intensidad de la IR-LED se ajusta dependiendo del peso de los objetos en la tabla de seguimiento, que se puede hacer fácilmente por un micro controlador conectado al circuito a través de la modulación de ancho de pulso (PWM). FIM produce imágenes de muy alta de contraste a través de una amplia gama de intensidades de iluminación. Es importante destacar que la GENtamente excelentes resultados en ya baja irridation infrarrojos general.
Una cámara con un filtro de infrarrojos se coloca por debajo de la tabla de seguimiento, lo que permite la integración de estímulos adicionales a la configuración. Estímulos de calor pueden ser aplicados fácilmente por una placa de radiador de calor y estímulos de luz se aplican mediante un proyector LCD. También odorantes pueden estar contenidos en los gradientes de tapas sencillas 8. Para los experimentos de gradiente de calor, la placa de radiador de calor se perfunde con agua caliente y fría en ambos lados, respectivamente, y se coloca 2 mm por encima de las larvas (Figura 1B).
La generación de alto contraste, películas de alta calidad abre la posibilidad de sofisticados análisis de imágenes por computadora, por lo que se implementó el software FIMTrack para extraer un gran conjunto de características a partir de imágenes (Figura 2). Las primeras seis funciones principales se definieron a partir del contorno del animal (Figura 3A). Estas características proporcionan la línea de basePara más cálculo de seis características secundarias que describen la forma animales y su posición en ciertos estímulos en un punto de tiempo dado (Figura 3B). Actualmente, nueve características terciarias se calculan que están integrando aspectos temporales y por lo tanto caracterizar la locomoción del animal junto con las características primarias y secundarias (Figura 3C).
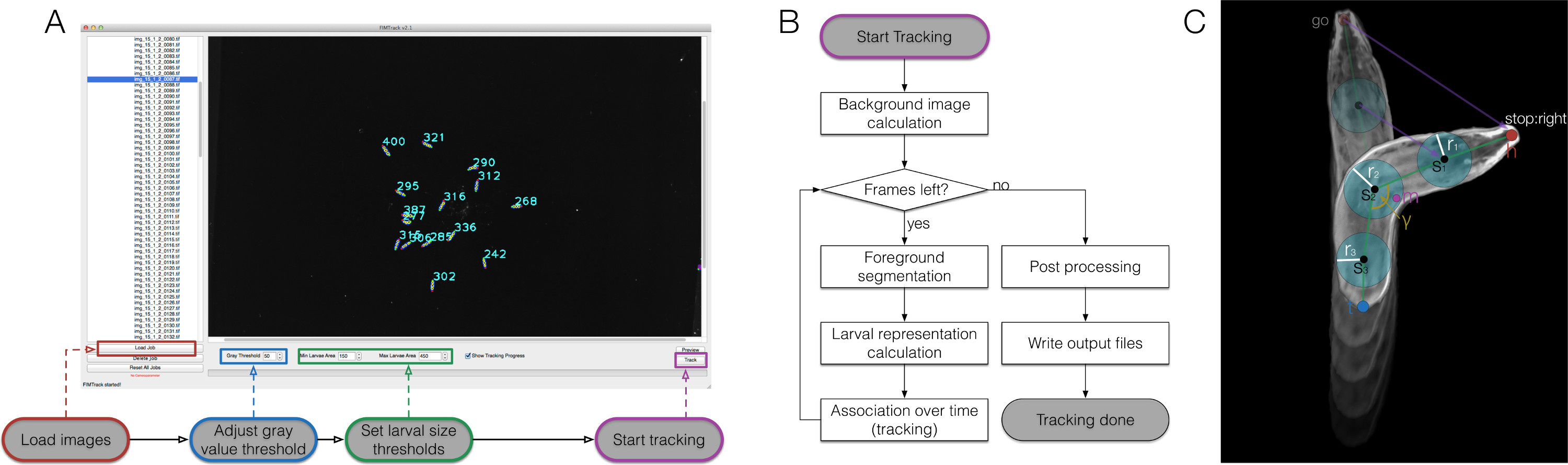
Figura 2. Panorama FIMTrack, flujo de trabajo algorítmico y la representación de las larvas. (A) ¿Cómo utilizar FIMTrack. Las imágenes se cargan. Umbral de valor de gris y umbrales de tamaño de las larvas que definen las larvas solo deben establecerse. El área de larvas debe estar en [-min tamaño, de tamaño max]. El seguimiento se inició por el botón resaltado. Flujo de trabajo (B) Seguimiento. Después de hacer clic en el botón de inicio, la imagen de fondo es calculated (intensidades mínimas en el tiempo). Mientras hay marcos de la izquierda, las larvas se segmentado basado en el umbral de gris y la minería y el umbral máximo de tamaño. Para todas las segmentaciones las representaciones de larvas se calculan (comparar con (C)). Cada nuevo modelo se asocia a una trayectoria dada si una pista válida disponible. Si se alcanza el último cuadro, finalizando el procesamiento posterior se realiza seguido por la generación de salida. (C) la representación de las larvas. El animal se compone de una cabeza y un punto de cola (h y t). Entre estos puntos un número impar arbitrario de puntos de la columna s i se puede configurar con un radio r i. Además, el centro de masa m y el cuerpo principal de flexión γ ángulo se calculan. Varios parámetros relacionados con el movimiento se esbozan por líneas de color púrpura. Por favor, haga clic aquí para ver una versión más grande de esta figura.

Figura 3. Características calculados por FIMTrack. (A) características primarias basado en el contorno de los animales. (B) características secundarias, con base en las características primarias. (C) Características del Terciario, con base en las características primarias de cuadros consecutivos y aportes adicionales Haga clic aquí para ver una versión más grande de esta figura.
