

Summary
この方法は、垂直方向の地下欠陥を見つけることを目的としている。ここでは、レーザーを空間光変調器と結合し、高解像度の熱画像を取得しながら、2つの逆位相変調線で決定的にサンプル表面を加熱するためにビデオ入力をトリガーします。欠陥位置は、熱波干渉極小値の評価から検索される。
Abstract
提示された方法は、表面に対して垂直に配向された表面下の欠陥を見つけるために使用される。これを達成するために、我々は欠陥によって妨害される破壊的に干渉する熱波場を作り出す。この影響を測定し、欠陥の位置を特定するために使用する。我々は、修正されたプロジェクタを使用して、破壊的干渉波フィールドを形成する。プロジェクタの元の光エンジンは、ファイバ結合された高出力ダイオードレーザに置き換えられています。そのビームは、プロジェクタの空間光変調器に合わせて整形され、最初にビームプロファイルを特徴づけることによって、最適な光学スループットと均一投影に最適化され、機械的および数値的に修正されます。厳密な幾何学的状況(幾何学的画像歪みの補正を含む)および試料表面での弱い温度振動を検出するための要件に従って、高性能赤外線(IR)カメラが設定される。データ収集は一度同期することができます個々の熱波場源、走査ステージ、およびIRカメラの間のローレンスは、調査される特定の材料に調整される必要がある専用の実験装置を使用することによって確立される。データ後処理の間に、サンプルの表面の下の欠陥の存在に関する関連情報が抽出される。それは、試料表面のいわゆる空乏線からの取得された熱放射の振動部分から取り出される。欠陥の正確な位置は、最終ステップにおけるこれらの振動の空間 - 時間的形状の分析から推論される。この方法は、リファレンスフリーであり、熱波場内の変化に対して非常に敏感である。これまでのところ、この方法は鋼サンプルで試験されているが、異なる材料、特に温度に敏感な材料にも適用可能である。
Introduction
レーザー投影光熱サーモグラフィー(LPPT)法は、試験片の体積に埋め込まれ、その表面に対して主に垂直に配向された表面下の欠陥を突き止めるために使用される。
この方法は、 図1bに示すような同じ伸びと周波数の2つの逆位相熱波場の破壊的干渉を使用する。等方性の無欠陥材料では、熱波は、コヒーレントな重ね合わせによって対称面で破壊的に( すなわち、ゼロ温度振動)中和する。表面下欠陥を有する材料の場合、この方法は、一時的な熱流とこの欠陥との間の横方向( すなわち 、面内)成分の相互作用を利用する。この相互作用は、サンプル表面上の対称線における再現された振動温度の伸びで測定することができる。ここで、欠陥含有試料は、重畳された熱波場によって走査され、サンプルの位置に関連して温度の伸びのレベルが測定される。対称性のために、欠陥が対称面を横切ると、破壊的干渉条件が再び満たされる。これにより、欠陥を非常に敏感に見つけることができます。さらに、破壊的干渉の最大外乱のレベルは欠陥の深さと相関するので、温度走査1を解析することによってその深さを決定することが可能である。
LPPTは能動的なサーモグラフィー方法論に割り当てられます。これは、過渡的な加熱が活発に行われ、結果的に過渡的な温度分布がサーマルIRカメラによって測定される、十分に確立された非破壊的な方法です。一般に、この方法論の感度は、過渡熱流に対して本質的に垂直に配向する欠陥に限定される。さらに、支配的な過渡熱伝導方程式は放物線部分差分体積式への熱の流れは強く減衰する。結果として、能動サーモグラフィー法のプロービング深さは、通常はミリメートル範囲の表面近傍領域に限定される。最も一般的なアクティブサーモグラフィー技術の2つは、パルス式およびロックインサーモグラフィーです。それらは、平面光学面照明2により高速であるが、表面に垂直な一時的な熱流をもたらす。したがって、これらの技術の感度は、加熱された試料表面に対して主に平行に配向された欠陥( 例えば層間剥離または空隙)に限定される。パルスサーモグラフィの経験則では、「検出可能な最小欠陥の半径は、表面下の深さの少なくとも1〜2倍にすべきである」 3と述べている3 。垂直に配向した欠陥( 例えば亀裂)と熱流との間の有効相互作用領域を増加させるために、熱流の方向はかわった。局所的な励起は、例えば線状または円形のスポットを有する集束レーザを使用することにより、垂直欠陥4,5,6,7と効果的に相互作用することができる面内成分を有する熱流を生成する。
この方法では、横方向の熱流成分を用いて表面下の欠陥を検出するが、熱波を重ねることができるが、欠陥、特に垂直方向の欠陥はこの重なりを妨げる。このように、提示された方法は、1 / 8,9以下の幅/深さ比で人工地下欠陥を検出することが可能であるため、基準のない対称で非常に敏感な方法に似ている。今まで、十分なエネルギーを供給している2つの逆位相熱波場を作り出すことは困難でした。我々はこれを達成した空間光変調器(SLM)を高出力ダイオードレーザに結合することにより、レーザシステムの高い光学パワーをSLMの空間的および時間的解像度( 図2参照)と高出力プロジェクタ。熱波場は、投影された画像のピクセル輝度を介して、2つの逆位相正弦波変調された線パターンの光熱変換によって生成される( 図2 、 図1a参照)。これは、試料表面の構造化された加熱をもたらし、明確に破壊的に干渉する熱波場をもたらす。表面下の欠陥を見つけるために、破壊的な推論の外乱は、IRカメラを用いて表面の温度振動として測定される。
熱波という用語は、熱伝播の拡散特性のために熱波がエネルギーを輸送しないため、議論の余地がある。それでも、hea実際の波と拡散過程10,11,12との間で類似点を使用することを可能にする。したがって、熱波は伝搬方向に高度に減衰されているものと理解できますが、時間とともに周期的に変化します( 図1b )。特徴的な熱拡散長 (熱伝導率k 、熱容量c p 、密度ρ )と励振周波数fで説明する。熱波は強く減衰していますが、波の性質を応用してサンプルの特性を把握することができます。熱波干渉の第1の適用を用いて層の厚さを決定した。我々の方法とは対照的に、干渉効果は、深さ寸法( すなわち 、表面に垂直)で使用され、レーザビームを分割することによって干渉の概念を第2の次元に拡張すると、表面欠陥14のサイズを決めるのに熱波干渉が用いられた。この方法は透過構造にも適用された。さらに、1つのレーザ源のみが使用されているため、この方法は建設的な干渉が適用されるため、無欠陥の基準が必要となります。光出力パワーが著しく制限された光源を内蔵した無修正液晶ディスプレイ(LCD)プロジェクタを使用して、Holtmann らによって時間的に制御された加熱が行われた.PribeとRavichandranによるさらなるアプローチは、レーザをSLM16にも結合することによって、 s = "xref"> 17。
(熱伝導率k 、熱容量c p 、密度ρ )と励振周波数fで説明する。熱波は強く減衰していますが、波の性質を応用してサンプルの特性を把握することができます。熱波干渉の第1の適用を用いて層の厚さを決定した。我々の方法とは対照的に、干渉効果は、深さ寸法( すなわち 、表面に垂直)で使用され、レーザビームを分割することによって干渉の概念を第2の次元に拡張すると、表面欠陥14のサイズを決めるのに熱波干渉が用いられた。この方法は透過構造にも適用された。さらに、1つのレーザ源のみが使用されているため、この方法は建設的な干渉が適用されるため、無欠陥の基準が必要となります。光出力パワーが著しく制限された光源を内蔵した無修正液晶ディスプレイ(LCD)プロジェクタを使用して、Holtmann らによって時間的に制御された加熱が行われた.PribeとRavichandranによるさらなるアプローチは、レーザをSLM16にも結合することによって、 s = "xref"> 17。
本明細書に提示されるプロトコルは、鋼サンプルの表面に対して垂直に配向された表面下欠陥を見つけるためにLPPT法を適用する方法を説明する。この方法は初期段階にありますが、提案されたアプローチを検証するのに十分強力です。しかし、それは実験セットアップの達成可能な光出力の点で依然として制限されている。光出力の増加は依然として課題であるので、提示された方法は、人工放電加工ノッチを含む被覆鋼に適用される。それにもかかわらず、プロトコルの最も重要で最も重要なステップは、均質な構造照明を生成し、破壊的な熱波干渉の前提条件を満たすこと、および欠陥を見つけることは、依然としてより要求の厳しい欠陥を保持することである。支配的な量は熱拡散長μであるので、LPPT法は多数の異なる材料にも適用することができる。
nt ">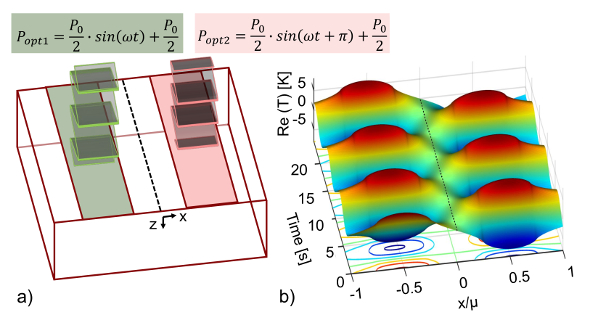
図1:破壊的干渉効果の原理 ( a )実験中に使用された照明パターンの概略図。サンプルは、πの位相シフトを有する2つの周期的に照射されたパターンによって空間的および時間的に加熱される。破線は、両方のパターン間の対称線を表す。このラインは、評価用に「空乏線」として使用されます。 ( b )熱的熱伝導方程式の解析解から計算された、空間的および時間的に分解された交互熱結果の図。これは、(a)の照明に対して、 P opt 1 = 1.5Wsin(2π0.125Hz t )+ 1.5WとP opt 2 = 1.5Wsin(2π0.125Hz t )の2つのパターンの放射照度に対する応答熱波を示す+π)+建築用鋼ρの 1.5W k p = 461 J /(kg・K)、 k = 54W /(m・K)である。破線の温度プロファイルは、均質で等方性の材料の熱振動を示していない。 この図の拡大版を見るには、ここをクリックしてください。

図2:アクティブサーモグラフィーで使用される構造化加熱の測定原理の略図。トップハットプロファイルにホモジナイズされたガウスビームは、空間光変調器(Spatial Light Modulator:SLM)に適用される。 SLMは、その切り替え可能要素によって空間的にかつ時間的にそのスイッチング速度によってビームを空間的に分解する。各要素はSLMピクセルを表します。この実験では、SLMはデジタルマイクロミラーデバイス(DMD)である。時間決定論的制御ソフトウェアを用いてピクセル輝度Aを変調することによって、サンプル表面構造化された方法で加熱される。提示された実験の場合、角周波数ωでコヒーレントに干渉する熱波場の起源である2つの逆位相線(位相:φ= 0、π)を変調する。波面は試料の内部構造と相互作用し、表面の温度場にも影響を与えます。これは、中波赤外線カメラによる熱放射によって測定されます。 この図の拡大版を見るには、ここをクリックしてください。
Subscription Required. Please recommend JoVE to your librarian.
Protocol
注:注意:クラス4レーザーを使用するため、レーザーの安全に注意してください。正しい保護眼鏡と服を着用してください。また、パイロットレーザーは注意して取り扱ってください。
1.ダイオードレーザとプロジェクタ開発キット(PDK)のカップリング
- ブレッドボードを準備する。
- 図3に示すように、すべてのデバイスをブレッドボードに事前に組み立てます。すべてのあらかじめ組み立てられた装置を備えたブレッドボードをレーザー実験室に置きます。
- ブレッドボードにレーザーファイバーマウントを配置します。
- ファイバをレーザファイバマウントに取り付けます( 図3参照)。
- ダイオードレーザーのスイッチシャッターとレーザーしきい値。ハイパワーIRセンサーカードを使用して、ビームの出力直径(40 mm)を確認します。レーザーのしきい値をオフにし、パイロットレーザーをオンにします。レーザーファイバーマウントの光軸の高さをPDKの入り口まで調整します。ラボジャック( 図4a、4d参照)。
- レーザーファイバーマウントをレールに沿って動かします。距離のあるパイロットレーザーの位置を観察します。その中心点は動くべきではありません。場合には、ラボジャックとレーザーファイバーマウントの間のマウントを確認してください。後でレーザーファイバーマウントを固定します。
注:レールは光軸の基準であり、ブレッドボードと平行に配置する必要があります。望遠鏡のレンズは、事前に取り外しておく必要があります。
- 望遠鏡を調整します。
- 望遠鏡を使用してビーム径を40mmから15mmに縮小してPDKの入り口に合わせます( 図4a、4d参照)。第1レンズと第2レンズにはそれぞれ200mmと75mmの平凸レンズを使用してください。パイロットレーザーと十字線を使用して、最初のレンズを配置します( 図4b参照)。
- スチールルーラーを使用して、両レンズ間の距離をおおよそ調整します。もう一度十字線を使うレンズをパイロットレーザに位置決めする。第2のレンズをxy平行移動ステージに取り付ける。ステージを使用してビームをコリメートします。
- ビームサンプラーを調整します。
- ビームサンプラーを45度の角度で(レーザービームで)打つ。ビームサンプラーの位置を決めるには、最初のレールに垂直な第2のレールを使用します。
注:ほとんどの光パワーは500Wパワーメータで冷却されます。ダイオードレーザーの光出力は最大出力でより安定しているため、光パワーが分割されます。 - 高さ固定のポストにアイリスを使用して、パイロットレーザーを使用してレールに沿った光路を確認します( 図4a参照)。
- ビームサンプラーを45度の角度で(レーザービームで)打つ。ビームサンプラーの位置を決めるには、最初のレールに垂直な第2のレールを使用します。
- ミラーを整列させます。
- 図4cのようにミラーを位置合わせする前に、PDKとベースプレートを取り外します。 3番目のレールを2番目のレールに垂直に固定します。もう一度、虹彩で光路を確認します。
注:光路sレールの向きに合わせる必要があります。ビームをコリメートする必要があります。
- 図4cのようにミラーを位置合わせする前に、PDKとベースプレートを取り外します。 3番目のレールを2番目のレールに垂直に固定します。もう一度、虹彩で光路を確認します。
- PDKを分解して位置決めします。
- PDK 18を設置する前に、元のライトエンジンを取り外してください。
注:PDK19のLEDを元々視準していた2つの以前のレンズがあった( 図4d 、入口参照)。それらは糊付けされており、アセトンを用いて除去する必要がある。 - PDKのプラットフォームを第3のレールに平行に、したがってビームの光軸に合わせます。 PDKの入り口に合わせて調整した十字線を使用して、PDKをビームに対して配置します。平行に並んでいます。 PDKを通過するには弱すぎるため、パイロットレーザーをオフに切り替えます。
- PDK 18を設置する前に、元のライトエンジンを取り外してください。
- 光パワーを確認するために、白い画像を投影します。
- PDKのHDMIケーブルとUSBケーブル、およびデータ集録(DAQ)カードが接続されていることを確認してくださいPCを制御する。 「レーザーシャッター」、「レーザースレッショルド」、「レーザーオン」のレーザーコントロールボックスのポートをDAQカードに接続します。コントロールボックススキャナの「レーザー制御電圧」ポートをDAQカードに接続します。
- PDK制御ソフトウェア20を起動し、 図5bのステップi.1〜i.3に従って通常のプロジェクタとして構成する。 2番目の画面を有効にし、2番目の画面にウィンドウがないことを確認します。白いデスクトップの背景を使用し、入力光源としてLEDフラッシュライトを使用してプロジェクタの機能を確認します。
注:白いイメージがPDKのイメージプレーンに投影されている場合、デバイスは正常に動作しています。
- 光入力パワーを確認してください。
- パワーメータコントロールユニットに取り付けられた30 WパワーメータヘッドをPDKの前の光路に入れます( 図4eの位置1参照)。ダイオードレーザーを切り替えますステップi.1 = 0.5Vの低出力レベルで、 図5aのステップi.1〜i.3の後にLPPTレーザ制御ソフトウェアでオンにする)。
注記:LPPTレーザー制御ソフトウェアは、レーザー制御出力を切り替えるDAQカードを切り替えます(1.7.1参照)。レーザーの安全性、メガネ、保護服を検討してください! - ハイパワーIRセンサーカードを使用してパワーメーターセンサーの位置を確認します。 IRカードを梁の中に収め、光るのを見ます。ビーム径とパワーメーターセンサーエリアを合わせます( 図3 )。
- 10 kVの値で、PDKの入口( 図5a )、ステップi.1)の最大光入力パワーを確認します。
注:PDKの入り口での光入力パワーは最大約22 W 21でなければなりません。この構成では、デジタルマイクロミラーデバイス(DMD)として実現されるPDKの場合のSLMを破壊することなく、5分までの測定時間が許容された。 - 光出力を確認してください。
- PDK対物レンズに取り付けられたaf = 60 mmレンズを使用して、30 WパワーメーターヘッドをPDKに約60 mmの距離に配置します( 図4e参照)。
- LEDフラッシュライトをプロジェクタの入口に置き( 図4d参照)、スイッチを入れます。 図4eに示すように、投影された画像の光を集めるように、パワーメーターヘッドの位置を微調整します。その後、LEDフラッシュライトを取り外します。
- LPPTレーザー制御ソフトウェアを起動します。 「電圧」フィールドに「0.5V」と入力し、「Laser On!」をクリックします。ボタン。パワーメータコントロールユニットから光パワーを読み取ります。 「停止」ボタンをクリックしてレーザーを停止します。これらのステップを2V、6V、10Vで繰り返す( 図5a 、i.1〜i.3参照)。
注記:10 Vの電圧で光出力が "#62; 4 W、初期テストは成功です。それ以外の場合は、光学アライメントを確認する必要があります。ミラーを微調整して光出力を最大にしてください。
- ビームプロファイルを測定します。
- 増幅器とピンホール付きフォトダイオードを使用して、結果として得られる投影画像のビームプロファイルを測定します( 図4f参照)。ビームプロファイラがアクセス可能な場合は、このデバイスを使用しますが、ビームは弱くなります。
- ブラケットに取り付けられている変換ステージにフォトダイオードを取り付けます。また、中性密度(ND)1反射フィルターと1mmピンホールをダイオードに接続してください。電動トランスレーションステージとラボジャックの上にフォトダイオードを置きます。高さを得るには、2つのブレッドボード(100 mm x 100 mm)を使用します。
- PDK-対物レンズ( 図4e 参照)の後にaf = 100mmレンズを使用し、LEDフラッシュライトを使用して白色画像を投写します(ステップ1.7参照)。フォトダイオードをイメージプレーンに移動し、変換ステージで移動するフォトダイオードの範囲が投影画像内にあることを確認してください( 図4f参照)。
- フォトダイオードを電源とDAQカードに接続します。光レーザーパワーのための6 Vの制御電圧に40 dBの増幅を使用します。電動並進ステージのモーションコントローラを制御PCに接続します。
注:LPPT輝度ソフトウェアは、一定の速度v = 0.1 mm / sで照明された領域を通るピンホールフォトダイオードの動きを制御し、フォトダイオード信号を100 kHzで記録します。レーザーはソフトウェアによっても制御されます。 - 図4fに示すように、ステージのマイクロメータースクリューを1 mmステップで使用して、画像をスキャンします。 図6a-6bの結果を参照してください。
- 補正画像を計算します。
- ビームプロファイルの不均一性を補正するために、ビームに関する反転画素マトリクスを計算するプロフィール。エッジ検出アルゴリズムを使用して投影画像の範囲を特定する。
- ステージ速度を使用して時間情報を空間情報に変換します。空間情報をx = 1,024ピクセルおよびy = 768ピクセルでPDKのピクセルドメインに変換します。ダイオード信号を最大値に正規化します。
注:補正のための基準レベルは、全ての正規化された画像値の平均で選択された。減衰のレベルは次の式で計算されます。
P Pixelはピクセル当たりの正規化されたダイオード強度である。 1 より大きいピクセルLCの値は1に設定されます。 - 補正マトリクス( 図6c参照)に白色画像を掛け、補正が十分であるかどうかを確認するためにプロファイルを再度測定する( 図6e-6h参照)。
2.サンプルの準備
- パワーメータコントロールユニットに取り付けられた30 WパワーメータヘッドをPDKの前の光路に入れます( 図4eの位置1参照)。ダイオードレーザーを切り替えますステップi.1 = 0.5Vの低出力レベルで、 図5aのステップi.1〜i.3の後にLPPTレーザ制御ソフトウェアでオンにする)。
- 密度がρ = 7,850kg m -3 、熱伝導率k = 54W・m -1・K -1 、熱容量が100mm×100mm×40mmの構造用鋼St37の2つのブロックを試料材料として使用するc p = 461 J・kg -1・K -1である 。
- 図7に示すように、表面下の放電加工により0.25mm、0.5mm、0.7mm、1.25mm、1mm、1.5mm、1.75mm、2mmの2つのブロックに人工欠陥を挿入する。
- 欠陥を保護テープでテープ。均質な吸収を得るために表面をサンドブラストする。コーティングの前に、保護テープで欠陥をテープで覆う。アセトンを用いて表面を脱脂します。
- 30mmの距離から2回(0°と90°)グラファイトスプレーを照射してください。均質な表面があればコーティングは成功する。コーティングが損傷していない場合は、脱脂と清掃を再度開始し、コーティング工程。表面を約2時間乾燥させる。表面に触れないでください。放射率が変わります。
- テープをはがし、グラファイトが地下欠陥に入らないようにします。

3.実験を準備する
- PDKとダイオードレーザーを準備する。
- 手順1.7で説明したように白い画像を投影します。ステップ1.8)で説明したように、PDKの光入力パワーを確認します。手順1.9に示すように、PDKの光出力パワーを確認します。
- 500 Wパワーメータヘッドをパワーメータコントロールユニットに接続し、パワーメータをUSBケーブルを介してコントロールコンピュータ(PC)に接続します。
- モーションコントローラを準備し、サンプルを位置決めします。
- モーションコントローラを変換ステージに接続し、USBケーブルを介して制御コンピュータに接続します。 PDKに対して約80mmの距離で光軸に直交する平行移動ステージを配置する。
注:LPPTソフトウォーeは、制御コンピュータ上で動作してモーションコントローラを制御します。 - PDK対物レンズにf = 100 mmレンズを取り付けます。プロジェクターのイメージプレーンを見つけるには、LEDフラッシュライトを入力光源( 図4d 参照 、十字線で入口をマーク)としてPDKに接続します。
- 白いシートを対物レンズの前に約100 mmの距離に置き、それを前後に動かして鮮明な照明された矩形の平面、すなわち画像平面を見つけます。
- この面にコーティングされたサンプル面を置きます。線形変換ステージに取り付けられたラボジャックを使用してサンプルの高さを設定します。照らされた矩形の頂点がサンプルの頂点に当たるような高さを選択します( 図4g参照)。照射された領域の範囲内にあることを欠陥に位置付ける。
- デバイスの電源を入れ直してモーションコントローラをゼロにします。
- モーションコントローラを変換ステージに接続し、USBケーブルを介して制御コンピュータに接続します。 PDKに対して約80mmの距離で光軸に直交する平行移動ステージを配置する。
- カメラを準備し、金の鏡を置く。
- プロジェクタの入力光源としてLEDフラッシュライトを使用して、白い画像をサンプルに投影します。
- 金の鏡を標本の上端を見るような高さに置きます( 図4g )。 図3に示すように、ミラーを約35°の角度に設定します。金の鏡をできるだけPDKの目標に近づけ、投影を陰にしないでください。
注:ミラーは、取り付けられたポストホルダーのポストに取り付けられています。高さと位置はクランプで固定されています。 - 赤外線カメラを三脚に取り付けます。ブルズアイレベルでIRカメラを水平にします。 IRカメラをPDK対物レンズの高さに調整します。ゴールドミラー上に投影された白い画像が見えるように配置します。
注:光路に沿ったおおよその距離は約1mです。 - 赤外線カメラの対物レンズと赤外線カメラの間にスペーサーリングを使用してください。作るカメラのトリガ入力が測定データ取得カードに接続されていることを確認して、フレームを取り込むようにしてください。また、LANケーブルを介してIRカメラコントロールPCをIRカメラに接続します。
- カメラの電源を入れ、少なくともウォームアップ時間( 約 30分)待機してください。
- IRカメラコントロールソフトウェアを起動します。メニューバーの項目を「カメラ」に変更します。 「接続」ボタンをクリックしてIRカメラを接続します( 図8a 、ステップi.1参照)。
注記:カメラはシーンのライブイメージを表示します。 - 「リモート」ボタンをクリックしてパネル「リモートコントロール」を開きます( 図8d 、ステップi.2参照)。校正 "HF 100mm(-10℃〜60℃)1140μs"を選択してください。 図8d 、ステップi.2.1を参照してください。
注:騒音を低減するために、校正範囲はできるだけ小さくする必要があります。 - レンズのフォーカスリングを手動で調整して、IRカメラの焦点を合わせますサンプル面。
注:最大の空間分解能を得るには、カメラの視野が最大投影面積と同じ大きさであることが重要です( 図4gを参照)。 IRカメラの位置、高さ、向きを変えなければならない場合があります。画像が鮮明であるかどうかを決定するためには、画像平面において温度コントラストが必要である。コントラストを生成するためにスチールルーラーを使用することができる。 IR画像のコントラストがまだ低い場合は、選択ツールを使用して調整することができます( 図8c 、i.3参照) - ボタン「NUC」をクリックして不均一性補正を実行します( 図8d 、ステップi.2.2参照)。 IRカメラの対物レンズを覆い、「OK」ボタンをクリックします。
- IRカメラのピクセル領域とプロジェクタ座標の関係を決定する。
- PDKピクセルドメインとIRカメラピクセルドメインとの間の関係を決定する白い画像またはパターンをサンプル表面に投影することによって、サンプルの第2のスケール( 図4g、h参照)を生成する。 PDK領域とサンプルの長さスケールとの間の関係を与えるスチールルーラーを使用して投影面積を測定する。
- 21.3mm×16mm(4:3)の照らされた領域を得るために、PDK対物レンズに取り付けられたf = 100mmレンズを使用してください。
注記:PDK座標の長さスケールは、1投影ピクセル= 21.3 mm / 1,024ピクセル - PDKとIRカメラの関係を見つけてください。ステップ1.9.3を10 V繰り返す。
- 赤外線カメラソフトウェアを使用してメニューバー項目を「測定」に変更します。 「測定領域」ツールバー( 図8c参照)の「十字ツール」を選択します(ステップi.4)。表示されているフレームを左クリックして、結果の熱画像の角をマークします。
- クロスを右クリックしてプロパティウィンドウに移動します。 「座標」に変更し、それらを記録するPDK座標系への熱画像の後の変換。
4.実験を実装する
- 実験を準備する。
- 試料の長さスケールに対する照明領域を推定する。
- パターンあたり5.5mm×16mmの照明領域を得るには、f = 100mmレンズを使用します。照明されていない5.5 mm x 16.5 mmの範囲を選択してください。
注:放射照度は約1.2W /cm²です。
- パターンあたり5.5mm×16mmの照明領域を得るには、f = 100mmレンズを使用します。照明されていない5.5 mm x 16.5 mmの範囲を選択してください。
- 照明領域をPDKピクセルドメインに関連する単位で見積もります。
- ステップ3.4.2)の式を使用して、照射されたパターンの位置をPDKのピクセルドメイン(1,024ピクセル×768ピクセル)に変換します。 [(512、1); (512,768)]ピクセルを空白線として使用し、これは両方のパターンの間で対称的である。
- フレーム、測定時間、およびフレームの総数を計算するr期間。 v = 0.05mm / sの速度、 x = 10mmのステージ移動距離、およびPDKフレームレートf r = 40Hzを仮定して、 t = x / v = 200sを介して測定時間tを計算する。また、フレーム数をƒ=ƒr・t = 8,000と計算します。 f = 0.125Hzの励起周波数を用いて、 p = no f / t f = 320 frames / periodで周期p毎のフレームを計算する。
注:これらの値は、投影画像の生成に使用されます。 - 設定を確認し、レーザーシステム、IRカメラ、および(オプションで)温度コントロールがDAQカードに接続されていることを確認します。 500 Wパワーメータ、PDK、リニアステージがコントロールPCに接続されているか確認してください。
- 試料の長さスケールに対する照明領域を推定する。
- カメラコントロールPCをセットアップします。
- IRカメラがトリガ入力を受信すると、フレームを取得するようにIRカメラ制御ソフトウェアを設定します。このために、s魔法使いをパネル「カメラ」に差し込み、「リモート」ボタン( 図8a 、ステップi.2参照)をクリックしてリモートコントロールパネルを開きます。ドロップダウンメニュー( 図8d 、ステップi.2.3)から「IO処理」を選択し、「同期入力」と「ゲート」を有効にしてメニューを閉じます。
- 「Acquisition parameters」タブ( 図8a 、i.5参照)の右下隅をクリックして、取得メニューを開きます。ドロップダウンメニューから「Ext / Sync」を選択します( 図8b 、i.5.1参照)。 "Folder"フィールドにファイル名とフォルダ名を入力して、測定の名前を付けます( 図8b 、i.5.2を参照)。
- ステップ4.1.3から計算した総フレーム数を「カウント」フィールドに入力します( cf. i.5.3参照)。取得メニューを閉じ、 "Record"ボタンをクリックしてIRカメラのデータ収集を開始します( 図8 、i.6参照)。
注意:DAQカードからトリガ入力がある場合にのみ録音が行われます。
- 実験を行う。
- LPPT制御ソフトウェアを起動します。モーションコントローラを有効にするには、 "Activate?"ボタンをクリックします( 図9a 、i.1)。 図9a 、i.1に示すように、対応する名前付きフィールドを編集することにより、移動パラメータ "StartPosition" = "-5 mm"、 "EndPosition" = "5 mm"および "Velocity" = "0.05 mm / s"を設定します。 "Start Measurement"ボタンをクリックしてください( 図9a 、i.2参照)。
注記:欠陥がどこにあるか不明な場合は、より高速で移動距離を大きくしてください。 PDKの温度上昇と作成されるデータの量に注意してください。フレーム画像を生成するためのユーザインタフェースが現れることに留意されたい( 図9b参照)。 - 投影されたフレーム画像を生成する。 <ol>
- 「領域色の選択」フィールドを左クリックします。カラーダイアログからパターン領域の色を選択します( 図9 、i.3)。左上隅の描画ツールバーから「長方形ツール」を選択します。
- 左クリックして保持し、画像領域に跨って長方形を描画します。ステップ4.1.2の変換されたパターン座標を使用して、左下隅(i.4)に示されている長方形座標のサイズを設定します。 「エリアを定義する」ボタンをクリックします( 図9b 、i.5)。
注:PDKドメインの5.5mmパターンサイズの計算ピクセル座標は、長方形1(x1 = 116、y1 = 1; x2 = 380、y2 = 768)、長方形2(x1 = 644、y1 = 1; x2 = 908、y2 = 768)。 「定義領域」ボタンをクリックすると、パターンのプロパティを設定するためのダイアログが表示されます。
- LPPT制御ソフトウェアを起動します。モーションコントローラを有効にするには、 "Activate?"ボタンをクリックします( 図9a 、i.1)。 図9a 、i.1に示すように、対応する名前付きフィールドを編集することにより、移動パラメータ "StartPosition" = "-5 mm"、 "EndPosition" = "5 mm"および "Velocity" = "0.05 mm / s"を設定します。 "Start Measurement"ボタンをクリックしてください( 図9a 、i.2参照)。
- パターンのプロパティを設定します( 図9c 、i.6)。
- 「正弦波」を選択します。「信号タイプ」フィールドを左クリックしてドロップダウンメニューを表示します。 「Phase Shift」フィールドを「0°」、「Frequency」を「0.125 Hz」、「Amplitude」を「127」(第1パターンの位相シフト0、位相シフトπを二番目)。
- "Voltage"フィールドに "10"を挿入してレーザー電圧を10Vに設定します。ステップ4.1.3の値を使用して、「写真/期間」フィールドに320を貼り付けます。 "次へ"ボタンを押してください。パネルが閉じます。
注:LPPT制御ソフトウェアは、PDKの解像度で定期的な画像ストリームを計算します。白画素が最大光パワー及び黒画素ゼロパワーを意味するので、2つの振動パターンが計算される。第1のパターンのグレー値は、 P 1 = 127sin(2π0.125Hz t )+ 127で計算され、第2のパターンのグレー値は、 P 2 = 127sin(2π0.125Hz t+π)+ 127( 図2のグラフ参照)、時間tは選択されたフレームレートに離散化される(ステップ4.3.4参照)。
- 2番目の投影パターンを作成します。
- 図9のワークフローに従い、異なる色と「180°」の異なる「位相シフト」とを用いて、ステップ4.3.2)および4.3.3)を繰り返す。 "calc frames"ボタンをクリックして、投影されたパターンを計算します。ポップアップされたダイアログボックスで、PDKとIRカメラのフレームレートを「40 Hz」に設定します。
- 補正画像を読み込みます。
- 図9b )のステップi.12のワークフローに従ってください。 「荷重補正」パネルを選択し、ステップ1.11の計算画像のファイルを入力します。ボタンをクリックして補正画像を読み込みます。
- "Start"ボタンをクリックして測定を開始します( 図9b 、ステップi.13参照)。
注:ステージが動いている間、計算されたフレームはサンプルに投影されます。フレームは、IRカメラ制御ソフトウェアによって取得され、カウントされます。 - "Stop Measurement"ボタン( 図9a 、i.14 参照 )をクリックすると、すべてのフレームが取得されたときに(プログレスバー= 100%)測定を停止します。
注:クリックするとボタンのラベルが変わります。
5.データファイルの後処理
- LPPT後処理ソフトウェアを起動します。 「ロード」ボタンをクリックし、ファイルダイアログボックスで測定ファイルを選択します。 「OK」をクリックして、カメラデータフォーマットを後処理データフォーマットに変換します( 図10a参照)。
注記:IRカメラのデータは、IRカメラコントロールPCにネイティブフォーマットで保存されます。 IRカメラ制御ソフトウェア開発キットは、IRカメラのシーケンスを3次元マトリックス(ピクセルX、ピクセルY、フレーム番号)に変換するために使用されます。ヘッダはタイミングベクトルtを含む。 - ステップ3.4.3)からの4つの投影点P1x〜P4yの座標を挿入し、「変換」をクリックすることにより、IRカメラデータをPDK領域に変換する( 図10b参照)。
注:金ミラーを介してIRカメラに画像が投影されるため( 図4g参照)、結果として生じるIR画像が歪んでしまいます。アフィン幾何学変換は、IRカメラドメインからPDKドメインへと実行される。結果は1,024 x 768 xフレーム番号のサイズの行列です。 - 空乏線で温度情報を抽出する( 図10c参照)。
- ステップ4.1.2で既に選択されているように、フィールドL1x = Lx2 = "512"ピクセルを充填して、2つの点L1およびL2を有する空乏線を定義する。 L1y = "343"からL2y = "393"までのyを選択します。 図10cを参照のこと。
注記:ステップ5.2の変換のために、データは次のようになります。すぐに検索されますが、サンプルには一部しか照射されないため、副作用が発生します。したがって、パターンのエッジ領域を評価しないでください。依然としてノイズが大きすぎると、yのサイズを大きくすることができます。 - FrameRateを「40」Hz、周波数を「0.125」Hz、速度vを「0.05」mm / s、開始位置をxStartとして「-5」mmとすると、赤外線カメラの実験パラメータを設定します( cf. 図10c )。 図10cのように、 "フィット度" = "7"、 "スムージング" = "20"、および "ヒルベルト" = "500"のデータ後処理のパラメータを設定します。
注:空乏線で抽出されたデータは幾何学的に平均化されています。その後、交互の温度項ΔT ( 図11a、b参照)は、多項式フィット(適合度)を実行することによって取得される。得られた信号は、移動平均フィルタ(平滑化)によって平滑化される。最後に、ヒルベルト変換を適用して瞬間振幅を取得する。残りのリップルを低減するために、別の移動平均フィルタ(Hilbert)が適用されます。振幅の最小値に関する情報を用いて、隠れた欠陥の位置が得られる。 - [評価]をクリックしてデータ分析を実行します。 「CrackPosition [mm]」フィールドから欠陥の計算位置を読み取る。欠陥位置は図10dのウィンドウに示されている 。
- ステップ4.1.2で既に選択されているように、フィールドL1x = Lx2 = "512"ピクセルを充填して、2つの点L1およびL2を有する空乏線を定義する。 L1y = "343"からL2y = "393"までのyを選択します。 図10cを参照のこと。

図3:ハイライトされた光路を持つ実験装置の写真(赤線)。レーザーファイバーマウントは、ダイオードレーザーのファイバーに取り付けられています。ビームは望遠鏡によってPDKの入射口径に調整されます。 PDKに入る前に、ビームはビームサンプラーによって分割され、パワーメーターによってモニターされます。 PDKの内部では、ビームは均質化されたDMDに投影される。 LPPT制御ソフトウェアによって制御されるPDMは、照射パターンを試料に投影する。投影された光は、光熱変換され、サンプルを加熱する。温度は、試料表面から放出される熱放射(オレンジ色の線)を介してIRカメラによって測定される。サンプル自体は、線形変換ステージ上に配置される。 この図の拡大版を見るには、ここをクリックしてください。

図4:実験セットアップの調整を示す写真シーケンス。 ( a )実験装置の上面図が概要を示す。 ( b )望遠鏡のアライメント:十字線は、レンズをレーザービームの光軸に合わせるために使用されます。 ( c )光学素子のアライメント:バーシステムdを光学ベンチに対して使用して、ベンチに対して光学ビームを位置合わせする。ビームをベンチに平行に保つために、固定された高さのアイリスが使用されます。 ( d )プロジェクタとビームとの間の結合点の側面図。プロジェクタをビームに合わせるために十字線が使用されます。 ( e )プロジェクタシステムの透過率の測定:パワーメータは、プロジェクタの前後の光パワーを測定するために使用されます。 ( f )ビームプロファイルの決定:ピンホール及びND1フィルタは、投影画像を通して2つの線形ステージを介して移動されるダイオードに取り付けられる。プロジェクタは、白い画像を投影するように構成する必要があります。 ( g )ゴールドミラーを介して赤外線カメラをサンプルに位置決めする:サンプルは、プロジェクタのイメージプレーンに配置する必要があります。パワー密度を制御するために、対物レンズに取り付けられた対物レンズおよび追加のレンズを使用することができる。 ( h )決定投影画像、IRカメラ画像、およびサンプルの実際の長さの間のスケールの大きさ。 この図の拡大版を見るには、ここをクリックしてください。

図5:ソフトウェアのスクリーンショット ( a )LPPTレーザー制御ソフトウェアのスクリーンショット。 ( b )PDK制御ソフトウェア:ステップi.1〜i.3はPDKを通常のプロジェクターとして構成する方法を示しています。 この図の拡大版を見るには、ここをクリックしてください。

図6:不均一ビームプロファイルの補正。 ( a )投影された白色画像(フルイルミネーション)のビームプロファイルプロファイルを通して移動されたフォトダイオード。データは、中央に顕著なピークを有する不均一なビームプロファイルを示す。 ( b ) a )の赤線に対応する断面線プロファイル。 ( c )不均一性のレベルを低減するために、投影された白色画像をSLM上に重ね合わせた補正画像。 ( d )c)の赤線の対応する断面線プロファイル。 ( e )修正後のビームプロファイルは、トップハットプロファイルに近いプロファイルを示す。 ( f )e)における赤線の対応する断面線プロファイル。 ( g )2つの補正されたパターンの照明プロファイル。パターンは同じ周波数と振幅で変調されますが、反対の位相でパターン間に弱め合う干渉ゾーンができます。 ( h )g)における赤線の対応する断面線プロファイル。 ve.com/files/ftp_upload/55733/55733fig6large.jpg "target =" _ blank ">この図の拡大版を表示するには、ここをクリックしてください。

図7:サンプルの準備。 ( a )黒色被覆構造鋼St37(20mm×0.5mm×15mm)のブロックを示す試料表面の写真。 ( b )地下欠陥の透明なCAD図面。欠陥は、右側から40mmの位置にある。 (面1 = 0.25mm、面2 = 0.5mm、面3 = 0.7mm、面4 = 1.25mm)の理想化された欠陥を示すサンプルの側面図。サンプルの側面は、熱損失を低減するためにコーティングされていません。第2の試料(図示せず)は、側面1 = 1mm、側面2 = 1.5mm、側面3 = 1.75mm、側面4 = 2mmにその表面下欠陥を有する。= "_ blank">この図の拡大版を見るには、ここをクリックしてください。

図8:IRカメラ制御ソフトウェアのスクリーンショットステップi.1〜i.5は、データ収集のためにIRカメラを構成する方法を示しています。 ( a )「カメラ」パネルのスクリーンショット:IRカメラは、「接続」ボタンを介してIRカメラ制御PCに接続することができます。 「リモート」コントロールパネル(b)と取得パネル(d&e)には、ここからアクセスできます。さらに、「レコード」ボタンを使用して測定を開始することもできます。 ( b ) "Acquisition"パネルのスクリーンショット:5 V TTLトリガを受信した場合、フレームをキャプチャするためにIRカメラを "Ext / Sync"で設定する必要があります。 ( c ) "Measure"パネルのスクリーンショット: "Selection"ボタンでデータ表示範囲を調整できます。ポイントツールとラインツールIRカメラ画像を実世界座標に較正するために使用される。 ( d )赤外線カメラリモコン「校正」パネルのスクリーンショット。高感度を達成するには、小さな測定範囲(-10〜60℃)を選択する必要があります。 ( e )IRカメラリモコンパネル:IRカメラをトリガするためには、「Process-IO」、「IN1」、「IN2」を有効にする必要があります。 この図の拡大版を見るには、ここをクリックしてください。

図9:LPPT制御ソフトウェアのスクリーンショットソフトウェアとのユーザー対話のワークフローには、ステップi.1〜i.14としてマークされています。 ( a )LPPTメインパネルのスクリーンショット。 「活性化?ブール型で、trueの場合はステージをアクティブにします。 「スタート - 」および「エンドポシ「測定開始」ボタンは測定を開始し、パネル(b)に示すダイアログボックスを開き、偽の場合測定を停止します。 ( b )サンプルに投影されたパターンを作成するために使用されるユーザインタフェースのスクリーンショットピクセルに対応する色が選択され、領域は画像に矩形を描くことによって選択される。 (c)に示すパネルがポップアップして領域のプロパティを定義し、すべての領域を定義したら、 "calc Frames"ボタンを押すと画像が計算され、 "Load Correction" ( c )1つのパターンのプロパティを設定するために使用されるユーザインタフェースのスクリーンショット上のフレームは、信号タイプ(正弦波)、位相シフト度と周波数をHzで表示します。下側のフレームは、1周期あたりのフレーム数、振幅は1〜127、レーザー電圧(0 V〜10 V = 0 W〜500 W)を示しています。期間当たりのフレーム数は、期間が離散化される仕方を表す値です。 「次へ」ボタンが押されると、ダイアログボックスが表示され、カメラのフレームレート(Hz)とフレームの切り替え速度(Hz)が尋ねられます。 この図の拡大版を見るには、ここをクリックしてください。

図10:LPPT後処理ソフトウェアのスクリーンショット ( a )ネイティブIRカメラのデータ形式をロードして変換します。 ( b )変換点P1x〜P4yを用いて、フレームマトリクスをプロジェクタ座標系に変換する。 ( c )L1xからL2yは評価された線のピクセル座標を表す。そして、"v"は速度(mm / s)、 "xStart"はステージの開始位置(mm)、 "FrameRate"および "Frequency" 「フィット度」、「スムージング」、「ヒルベルト」は評価パラメータであり、適合度は多項式の適合度を表し、「平滑化」はノイズを低減するために使用される移動平均フィルタの要素数を表し、 「ヒルベルト」パラメータは、曲線の最小値を見つけるために平滑化のレベルを設定するために使用されます。( d )亀裂の位置を縦の破線で示す結果のスクリーンショット。 この図の拡大版を表示するには、ここをクリックしてください。
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
プロトコルに従って、0.25mmの深さに表面下欠陥を有する鋼サンプルの側面1を選択して、代表的な結果を生成した。欠陥は当初、照明された領域のほぼ中央に位置していた。次いで、サンプルを0.05mm / sの速度でリニアステージを介して-5mmから5mmに移動させた。これらのパラメータを使用して、 図11aは、空白線からそれらを抽出した後のスキャンデータを示す。この段階では、生データがIRカメラ制御ソフトウェアからプレビューとして入手できるので、実験の成功を見積もることができます(オプション:データをプレビューするためにラインツールを使用します( 図8のステップi.4を参照) 。さらなる信号後処理に続いて、 図11bは、0.3mmにおけるヒルベルト曲線(青色)の最小値における欠陥位置を示す。
実験を検証するには、曲線をh以下の特性を有する:対称であり、対称面で最小の顕著性を有し、左右に等しい2つの最大値を有する。最大値は、線源の1つからの熱流が、欠陥の熱の蓄積のために他の線源より支配的であるために生じる。これは、特に、欠陥が対称面の近くに配置されている場合に当てはまる。この欠陥は熱流の障壁となり、支配的な源の熱流とその欠陥からの反射を観測することができます。欠陥が中央に対称的に配置されている場合、熱の流れは等しく分割され、最小値は1になります。
スキャン速度の影響を図11cに示します。ここでは、同じ欠陥を評価するために走査速度を0.1mm / sに2倍にした。事前に、試料を相対的に異なる位置を得るためにステージ上でわずかにずらした。欠陥位置が決定された-2mmとする。伸びのレベルは図11aに示したデータと同様であり、実験の良好な再現性を示したが、振動は少なかった。最大伸びは欠陥の深さと相関するため、位置と深さに関する情報も同様に維持することができます1 。
図11dは準最適なデータセットを示す。欠陥は表面から1mm下にあり、これはこの拡散長と利用可能な光学パワーの検出限界にほぼ達している。欠陥の位置は依然として決定することができるが、ゼロ振動の位置がノイズの影響を既に受けているので、測定の不確実性はより大きい。この挙動から、欠陥検出実験の失敗の最も明白な兆候は、空乏線が完全に消滅した場合、または強い非対称性の挙動がある場合であると推論することができる。これはfolloに起因する可能性があります(i)IRカメラの空間分解能が十分でなく、空乏線が適切に解決できない、(ii)温度上昇に比べてカメラのノイズが高すぎる、(iii)照明パターンが(iv)選択されたステージ速度が照明パターンの変調周波数と比較して高すぎ、(v)(変調周波数による)熱拡散長が欠陥に適合していない深さ

図11:地下欠陥を特定するための実験からの代表的なデータセット。 ( a )0.25mmの深さの欠陥を有するSt37試料の側面1の代表的な実験データ。黒い線は、経時的な温度情報(上軸)を示しています。ステージを速度v = 0.05mm / sで平行移動させることにより、位置は検索された(下軸)。赤い曲線は、交互の温度成分を得るために使用される多項式近似(7 次 )を示す。 ( b )黒い曲線は、パネル(a)の温度データから多項式フィットを差し引いた交互温度グラフを示している。青色の曲線は、ヒルベルト変換を黒色の曲線に適用し、平均化することによって得られた。 ( c )0.1mm / sのステージ速度で-7mmから3mmの範囲にわたる同じ面の代表的な実験データ。周波数は半分になるが、伸びはパネル(a)と同様である。 ( d )表面下欠陥が深さ1mmのときに得られた最適ではない実験データ。 この図の拡大版を見るには、ここをクリックしてください。
Subscription Required. Please recommend JoVE to your librarian.
Discussion
提示された議定書は、表面に垂直に配向された人工表面下欠陥の発見方法を説明している。この方法の主な考え方は、地下欠陥と相互作用する干渉熱波場を作り出すことである。最も重要なステップは、(i)サンプル表面に2つの交互の高出力照明パターンを生成するために、SLMとダイオードレーザとを組み合わせること、これらのパターンは光熱的にコヒーレントな熱波場に変換され、(ii)表面下の欠陥と相互作用する間に破壊的に干渉するようにし、(iii)熱的イメージングを用いて試料表面の動的温度の表面走査からこれらの欠陥を見つけるIRカメラ。このアプローチは、隠れた欠陥1に対して非常に敏感であるため、絶対温度値ではなくゆっくりと変化する平均値の周りの温度の相対振動だけが必要である。
最も重要なステップの1つ構造化加熱のためにSLM結合レーザ源を使用する場合(ステップ1.10参照)、照明ビームプロファイルの十分な均質性を確立することである。ダイオードレーザは、高い放射照度を提供するが、正しいビーム直径および方向性を有するSLMを含むプロジェクタに供給されなければならない。プロジェクタ内の独自の光路とやや不可避の幾何学的およびスペクトルのミスマッチのために、サンプル上に生成された画像は歪められる。したがって、投影画像を制御する画像強度値の数値補正は、参照ビームプロファイル測定を用いて行われる。成功した実験の第2の重要なステップは、IR画像の高い空間分解能を達成することである(ステップ3.3.7〜3.3.8参照)。空乏領域は十分に空間的に分解されなければならず、そうでなければ空乏がなく、したがって欠陥位置が測定されない。
適用される熱波の性質は拡散様であるそのプロセスは振幅が数ミリメートルだけ強く減衰することにつながります。光源として高出力ダイオードレーザーを使用することにより、この固有の物理的制限を満たしています。現在の実験装置のボトルネックは、SLM21の熱応力限界であり、利用可能なレーザパワーのほんの一部しか適用できないことを意味する。我々の現在の解決策は、黒いグラファイトコーティングでサンプル表面をコートすることです。将来的には、高出力垂直キャビティ面発光レーザ(VCSEL)アレイ22のような、最適化された光エンジンまたは切り替え可能な直接レーザアレイを使用して、より高い感度のセットアップを期待する。
この方法と非破壊検査における既存の熱イメージングとの主な違いは、完全にコヒーレントな熱波場の破壊的干渉を使用することです。これは、個々のliのセットの振幅および位相を制御した後にのみ可能であるghtソースを決定的な方法で使用します。既存のサーモグラフ法では、時間領域で制御される平面光源、または空間領域で制御される単一の集束レーザスポットのいずれかが使用される。我々の手法の主な利点は、試料表面に垂直に存在する欠陥に対する高い感度である。
これまでのところ、2つの個別の光源のみが作成されている。レーザー結合されたSLMを使用することで、原則として、100万個の光源(100万個の熱源)をサンプル表面に生成して制御することができます。明らかに、このアプローチは、物理的な限界内で、超音波またはレーダーからアクティブサーモグラフィの分野への技術を、長期的に任意の熱波成形の可能性を広げ、技術を伝達する。上記の照射挑戦( すなわち、投射されたピクセル当たりの光出力)が十分に解決されると、表面より深く位置するより小さな欠陥さえも検出可能になるはずである。これまでのところ、鋼は試験されているが、この方法は、熱応力が低いために特にプラスチック、複合材料および他の敏感な材料に対して非常に有望である。
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
著者は何も開示することはない。
Acknowledgments
Taarna StudemundとHagen Wendlerに実験設定の写真を撮ってもらい、Figureの出版の準備をしてくれたことに感謝したいと思います。さらに、Anne Hildebrandt氏とSreedhar Unnikrishnakurup氏、Alexander Battig氏、Felix Fritzsche氏に感謝の言葉を述べていただきました。
Materials
| Name | Company | Catalog Number | Comments |
| 500 W diode laser system, 940 nm | Laserline | LDM 500 - 20 | Pilot laser class 2 @ 650 nm, diode laser is a class 4 laser system --> special laboratory needed |
| Laser control box | Laserline | Laser control box LDM | Add on to the laser system, used to switch electronically, laser threshold, shutter, laser on 0 V..5 V TTL |
| Control box scanner | Laserline | Add on to the laser system, used to adjust the optical output power via analog signal from 0 V..10 V | |
| Fiber Laser Mount 2", f = 80 mm | Laserline | Add on to the laser system | |
| Multifunction Data Aquisition (DAQ) Device + BNC Terminal | National Instruments | NI-USB 6251 | The DAQ card is used to trigger the IR camera, the DLP Light Commander 5500, control Laser and diode PDA 36A |
| Standard - PC | Control PC - graphic card for two screens, at least 4 x USB, Windows based | ||
| BNC cabel | Standard cable | ||
| HDMI cable | Standard cable | ||
| Micro USB to USB cable | Standard cable | ||
| LabVIEW 2013 SP1 Development System | National Instruments | Development environment for device control | |
| LPPT control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT intensity software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT laser control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| Matlab 2016b | MathWorks | Postprocessing of the measurement data | |
| LPPT postprocessing software | BAM | Postprocessing of the measurement data | |
| IR camera control PC | InfraTec | Control PC is supplied by camera distributor | |
| IR camera control software | InfraTec | Irbis 3 Professional | |
| InfraTec SDK | InfraTec | Dynamic Link Library as interface between the native data aquisition format of Infratec and Matlab | |
| IR camera | InfraTec | Image IR 8300 | 640 x 512, cooled InSb detector, wavelength 2 µm..5.7 µm, noise = 20 mK + accessories (LAN cable, Digital in/out cable, space ring, power supply, case) |
| Tripod | Manfrotto | 161MK2B | |
| IR camera mount | Manfrotto | 405 | |
| Projector development kit (PDK) for digital light processing (DLP) technology (DLP Light Commander 5500) | Logic PD | DLP-LC-DLP5500-10R | DLP5500 Digital Micromirror Device from Texas Instruments included , light engine and case need to be disassembed |
| PDK control software | Logic PD | Included when delivered, DLP Light Commander control software | |
| Mechanical platform for the PDK | BAM | Self made (140 x 230 x 420) mm3 | |
| Power meter control unit | Ophir | Vega | USB Interface |
| 30 W power meter head | Ophir | 30(150)A-LP1-18 | Power meter head to determine Transmission of the projector system |
| 500 W power meter head | Ophir | FL500A | Power meter for process supervision |
| Motion controller | Newport | ESP301 | with USB Interface |
| Translation stage | Newport | M-ILS200CC | Connected to ESP301 |
| Photodiode with amplifier | Thorlabs | PDA 36A-EC | 1" mount |
| Reflective filter ND1 | Thorlabs | ND10A | to be mounted to the PDA 36A |
| Pinhole 1" | Thorlabs | P1000S | to be mounted to the PDA 36A |
| Optical aluminium breadboard | Thorlabs | MB60120/M | (1,200 mm x 900 mm) base |
| Plano Convex Lens f = 200 mm | Thorlabs | LA1979-B | Coated for IR, first telescope lens |
| Plano Convex Lens f = 75 mm | Thorlabs | LA1145-B | Coated for IR, second telescope lens |
| xy-translation stage | Newport | M401 | Used for adjusting the telecope |
| Beamsampler | Thorlabs | BSF20-B | Splits the optical output, used to reduce the optical input for the projector system |
| Mirror | Thorlabs | BB2-E03 | Mirror for coupling the beam to the DLP Light Commander |
| Heavy duty lab jack | Thorlabs | L490 | Used for the fiber mount and on top of the linear stage to position the sample (2x) |
| PDK-objective | Nikon | Nikon AF Nikkor 50 mm 1:1:8:D | Objective for DLP Light Commander, 50 mm |
| Plano Convex Lens f = 100 mm | Thorlabs | LA1050 -B | Lens is attached to the Nikon Objective |
| Bi-Convex Lens f = 60 mm | Thorlabs | LB1723 -B | Lens to be attached to the Nikon objective in order to determine the optical transmission with the 30 W measurement head |
| Square protected gold mirror | Thorlabs | PFSQ20-03-M01 | |
| High power IR sensor card | Newport | F-IRC-HP-M | Sensor card to check the optical pathway |
| 2" crosshairs | BAM | Self-made | |
| 1" crosshairs | BAM | Self-made | |
| Bullseye level | Thorlabs | LCL01 | |
| Translation Stage | Newport | M-UMR8.25 | Used for measuring the beam profile |
| Micrometer screw | Newport | DM17-25 | Used with translation stage M-UMR8.25 |
| Mounted Zero Aperture Iris | Thorlabs | ID75Z/M | used to check the optical pathway |
| Bases and Post Holders Essentials Kit, Metric and Universal Components | Thorlabs | ESK01/M | Basis |
| Posts & Accessories Essentials Kit, Metric and Universal Components | Thorlabs | ESK03/M | |
| M6 Cap Screw and Hardware Kit | Thorlabs | HW-KIT2/M | |
| Construction Rails | Thorlabs | XE25L700/M | |
| 1" Construction Cube | Thorlabs | RM1G | Used to mount construction rails |
| Electrical discharge machining | Sodick | AG60L | www.sodick.de |
| St37 block of steel (100 x 100 x 40) mm3 |
BAM | self-made, hidden defect with remaining wall thicknesses of 0.25 mm, 0.5 mm, 0.70 mm, 1.25 mm (shown in Figure 5) | |
| St37 block of steel (100 x 100 x 40) mm |
BAM | self-made, hidden defect with remaining wall thicknesses of 1 mm, 1.5 mm, 1.75 mm, 2 mm (shown in Figure 5) | |
| Graphite spray | CRC Industries Europe NV | GRAPHIT 33 | Ref. 20760, 200 mL aerosol (Kontakt-Chemie) |
| Protective tape | Tesa | tesakrepp 4348 | used to protect the hidden defects while coating |
References
- Thiel, E., Kreutzbruck, M., Ziegler, M. Laser-projected photothermal thermography using thermal wave field interference for subsurface defect characterization. Appl. Phys. Lett. 109 (12), 123504 (2016).
- Ibarra-Castanedo, C., Tarpani, J. R., Maldague, X. P. V. Nondestructive testing with thermography. Eur. J. Phys. 34 (6), 91-109 (2013).
- Maldague, X. P. Introduction to NDT by active infrared thermography. Mater. Eval. 60 (9), 1060-1073 (2002).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning pulsed laser spot thermography. Ndt&E Int. 44 (2), 216-225 (2011).
- Lugin, S. Detection of hidden defects by lateral thermal flows. Ndt&E Int. 56, 48-55 (2013).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning laser-line thermography and laser-spot thermography. Meas. Sci. Technol. 22 (3), (2011).
- Pech-May, N. W., Oleaga, A., Mendioroz, A., Salazar, A. Fast Characterization of the Width of Vertical Cracks Using Pulsed Laser Spot Infrared Thermography. Journal of Nondestructive Evaluation. 35 (2), 22 (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. SPIE 9761. Douglass, M. R., King, P. S., Lee, B. L. , Spie-Int Soc Optical Engineering. (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. WCNDT 2016. , 6 (2016).
- Mandelis, A. Diffusion-Wave Fields: mathematical methods and Green functions. , Springer-Verlag. (2001).
- Almond, D., Patel, P. Photothermal Science and Techniques. 10, Chapman & Hall. (1996).
- Salazar, A. Energy propagation of thermal waves. Eur. J. Phys. 27 (6), 1349-1355 (2006).
- Bennett, C. A., Patty, R. R. Thermal wave interferometry: a potential application of the photoacoustic effect. Appl. Opt. 21 (1), 49-54 (1982).
- Busse, G. Stereoscopic depth analysis by thermal wave transmission for nondestructive evaluation. Appl. Phys. Lett. 42 (4), 366 (1983).
- Holtmann, N., Artzt, K., Gleiter, A., Strunk, H. P., Busse, G. Iterative improvement of Lockin-thermography results by temporal and spatial adaption of optical excitation. Qirt J. 9 (2), 167-176 (2012).
- Pribe, J. D., Thandu, S. C., Yin, Z., Kinzel, E. C. Toward DMD illuminated spatial-temporal modulated thermography. Proc. SPIE 9861. , (2016).
- Ravichandran, A. Spatial and temporal modulation of heat source using light modulator for advanced thermography. , Missouri University of Science and Technology. (2015).
- DLP 0.55 XGA Series 450 DMD. , TexasInstruments. (2015).
- Application Note - DLP System Optics. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?baseLiteratureNumber=dlpa022&keyMatch=dlpa022&tisearch=Search-EN-Everything (2010).
- DLP LightCommander Control Software - User Manual. , LogicPD. Available from: https://support.logicpd.com/ProductDownloads/LegacyProducts/DLPLightCommander.aspx?_sw_csrfToken=318b0448 (2011).
- White Paper - Laser Power Handling for DMDs. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?literatureNumber=dlpa027&fileType=pdf (2012).
- Moench, H., et al. High-power VCSEL systems and applications. Proc. SPIE 9348. , (2015).
